
Abstract
To solve the problems of slow convergence speed, poor robustness, and complex calculation of image Jacobian matrix in image-based visual servo system, a hybrid regression model based on multiple adaptive regression spline and online sequential extreme learning machine is proposed to predict the product of pseudo inverse of image Jacobian matrix and image feature error and online sequential extreme learning machine is proposed to predict the product of pseudo inverse of image Jacobian matrix and image feature error. In MOS-ELM, MARS is used to evaluate the importance of input features and select specific features as the input features of online sequential extreme learning machine, so as to obtain better generalization performance and increase the stability of regression model. Finally, the method is applied to the speed predictive control of the manipulator end effector controlled by image-based visual servo and the prediction of machine learning data sets. Experimental results show that the algorithm has high prediction accuracy on machine learning data sets and good control performance in image-based visual servo.
Keywords
Introduction
The robotic system is applied more and more widely. 1 –4 Visual servo 5 –8 control is an important control measure in a robotic system. Based on visual feedback, visual servo can be classified as position-based (PBVS), image-based (IBVS) and hybrid-based visual servo (HBVS). 9,10 The PBVS control system 11 needs to use the image information collected by the camera for three-dimensional (3D) reconstruction to obtain the current pose. The hybrid visual servo control obtains the objective image information from the camera and calculates the homography matrix by extracting image features.
In the IBVS, the image Jacobi matrix is an important concept, which represents the relationship between the pose change of the robot end effector and the image feature change. In this case, the control relationship can be obtained by the inverse of the matrix. Furthermore, by controlling the robot limb to move to the desired pose, we can obtain the desired features that converge with the image features. As mentioned above, because the inverse of a matrix is required to obtain the control relationship, the singularity problem needs to be addressed. 12 IBVS only uses image features as the control signal of the system objective function and does not need 3D reconstruction, so it has the characteristics of simple control structure. In addition, the acquisition of control signals in the IBVS system does not depend on the system parameters of the camera or the robot, so IBVS is more suitable for the case where the visual servo is not calibrated. Even with a 2D image, for the uncalibrated IBVS, the information from the image that can be used as a control signal is still significant. The image characteristics of familiar visual servo control include point features, line features, 13 and image moments, 14 –16 among others. Because the IBVS method is performed in image space, the path of the image features can be controlled better. For example, the feature points can converge to their desired positions in a nearly straight path, which ensures that almost all image features are within the camera lens range. In the study by Liu et al., 17 when the unknown geometric parameters for the depth independent Jacobi matrix is taken as the linearization description based on image features, a new error function was established in that study to estimate the parameters.
Through the analysis of IBVS, it can be found that the implementation of IBVS control system is relatively simple and does not need complex 3D reconstruction. In IBVS, the acquisition of image Jacobian matrix is complex. Image Jacobian matrix needs good camera calibration and feature depth information. However, in practice, the depth information of features is not easy to obtain, and the camera calibration is easily disturbed by external noise, which leads to a large difference between the obtained image Jacobian matrix and the actual Jacobian matrix. Therefore, some scholars proposed to use neural network in IBVS, Kang et al. 18 proposed an adaptive visual servo control method combining extreme learning machine (ELM) and Q-learning. ELM was used to predict Jacobian matrix and pseudo inverse, which solved the possible difficulties in obtaining Jacobian matrix. In addition, the author used Q-learning to improve the convergence of IBVS system. Qiu and Wu 19 used adaptive neural network in IBVS to complete the servo task without depth information.
Neural networks can be used to approximate nonlinear parameters. However, traditional neural networks have problems of low approximation accuracy and poor generalization performance. Online sequential extreme learning machine (OS-ELM) is an improved method of neural network ELM. OS-ELM continuously adjusts the output weight of the network through data samples to improve the generalization of the network and the prediction accuracy of the network. Therefore, compared with traditional neural networks, OS-ELM can be used in scenarios that require higher prediction accuracy. Gao et al. 20 used an online sequential parallel extreme learning machine to predict the duration of use of electronic equipment, and their experiments showed that the OS-ELM method has better stability and higher prediction accuracy. Peng et al. 21 proposed an adaptive OS-ELM for predicting the power fluctuation of ships. The author verified in the experimental part that the proposed method can predict better power data and improve the performance of the control system. To avoid overfitting when dealing with large-scale data, a method of regularizing OS-ELM is used in data prediction, 22 and the experimental results show the superiority of OS-ELM.
Considering the complexity of image Jacobian matrix and image feature data in IBVS, MARS is used to select features, reduce the complexity of data, and select better inputs for OS-ELM model, so as to establish a regression model for predicting the product of pseudo inverse of Jacobian matrix and image feature error. MARS can be used for feature selection to improve the accuracy of pattern recognition. Kao and Chiu 23 applied MARS and recurrent neural network to the problem of variable selection, which improved the performance of engineering control. Li et al. 24 proposed a new strategy using cluster analysis. MARS is used to describe complex nonlinear relationship models, which improves the accuracy of prediction. Depren et al. 25 used MARS as an important predictor to determine the amount of nonperforming loans and selected the most suitable parameters from multidimensional data to solve the problem of nonperforming loans in Turkey. Bose et al. 26 proposed a hybrid model combining MARS and deep neural network (DNN) for stock price prediction, used MARS to screen important data, and passed the screened data to DNN for training. Cartocci et al. 27 proposed a nonlinear model to characterize the nonlinear redundancy relationship between system signals. MARS is used to identify the relevant fault characteristic matrix in the data, which improves the performance of the diagnosis system.
The IBVS manipulator is a real-time control system that primarily includes objective image acquisition, image processing, objective features extraction, image Jacobi matrix estimation, feedback control sequence calculation, and motion control. In IBVS, the calculation of image Jacobian matrix needs depth information and is easily disturbed by noise in the calculation process. The estimation of image Jacobian matrix can be solved by regression model. Therefore, this article proposes a hybrid regression model based on multivariate adaptive regression spline and OS-ELM. Using the good prediction ability of OS-ELM, the regression model of image Jacobian matrix is established. To improve the prediction ability of the model as much as possible, the model input should consider as many variables as possible, including image feature information, Jacobian matrix, and the change of manipulator joint angle. At the same time, considering the complexity of model input data, MARS is used to obtain important input variables and reduce the dimension of OS-ELM model input variables, so as to establish a more efficient multiple adaptive regression spline and online sequential extreme learning machine (MOS-ELM) model. To test the robustness of the hybrid regression model, we first apply it to the machine learning data set and then apply it to the IBVS system simulation model.
Evaluation of the importance of training samples by the multivariate adaptive regression spline (MARS) method, and its selection of important variables samples as the input features for the OS-ELM, which reduces the feature dimension to a certain degree, thus simplifying the computational complexity of the system. The prediction results of machine learning data set show that this method improves the prediction accuracy of regression model.
Our proposed method addresses the difficulty of calculating the precise image Jacobi matrix in the Classical IBVS system and improves the system convergence speed. The performance analysis result shows that the proposed algorithm performs well in the IBVS system with respect to the performance indexes of convergence speed, trajectory length, and cumulative error.
The proposed method has good performance in IBVS systems with different configurations, and MOS-ELM is used to predict the product of image Jacobian matrix and image feature error, which not only solves the difficulty of accurately calculating image Jacobian matrix but also shows good performance in the interference of external noise and improves the robustness of IBVS system.
The structure of this article is as follows: The first section introduces the research status of IBVS and MOS-ELM. The second section introduces MARS and OS-ELM. The model of MOS-ELM is introduced in the third section. Experiments are given in the fourth section. The conclusion is given in the final section.
Brief review of multivariate adaptive regression spline and OS-ELM
Multivariate adaptive regression spline
MARS is a nonlinear and nonparametric regression model that predicts continuous dependent variables based on a set of independent variables.
28
MARS uses a combination of basis functions to fit complex nonlinear functions and effectively segments high-dimensional data in the case of large samples. In addition, MARS can identify the important variables from among all the variables of the system and reduce the dimensionality of these variables. Thus, it can be used for feature selection. For a training set with input variable

where

Defined


where t represents the node,
Step 1 (forward process): The forward process is to continuously add new basis functions on the basis that the basis function combination only contains constant terms, so as to find the basis function combination that minimizes model
Step 2 (backward pruning process)
29
: In the forward process, as the basis functions increase, the model becomes more and more complex, and there is a risk of overfitting. The backward pruning process is based on the generalized cross validation (GCV) criterion to reduce the basis function and thereby to reduce the risk of overfitting of the regression model. Where GCV is defined as follows

where
Online sequential extreme learning machine
ELM has been used widely since it was first proposed in 2006.
30
–34
OS-ELM is a variant of the ELM, which is an incremental learning algorithm.
35,36
Sequential learning algorithms structure a model whose construction is alterable, which is used in dynamic time-varying systems. Its learning process consists of initialization and online learning. In the initialization stage, the output weight matrix
Step 1 (initialization process): Derive a subset
Then, the initial estimation of the output weight matrix is attained as

where
Step 2 (sequence learning process): When some new samples are inserted in the model, and, say, the number of these samples is L
1, then we obtain the following formula based on the concept of ELM

Let

Thus, we can obtain the following recursive formulae


Finally, set
Proposed method
Hybrid regression model based on multivariate adaptive regression spline and OS-ELM
During the development of OS-ELM, many studies proposed improved algorithms for OS-ELM, such as KOS-ELM, among others. 38 However, the Kalman and online sequential extreme learning machine (KOS-ELM) algorithm suffers from some problems related to training time and accuracy. To address the question of regression, in this study, we proposed the regression model of MARS and OS-ELM. First, we developed a prediction model that uses MARS and takes the training sample as input. One of the characteristics of MARS is the importance of assessment features to the prediction result. Therefore, in our study, we separate the important features from all the features of the sample using this characteristic. Then, these important features are used as input of the OS-ELM. The benefit of eliminating these unnecessary features is to reduce the dimensionality of the input samples and to some extent reduce the training complexity. Our proposed MOS-ELM algorithm is shown in Algorithm 1. The flowchart of the MOS-ELM algorithm is shown in Figure 1.
MOS-ELM algorithm.



MOS-ELM flowchart.
Uncalibrated vision servo system based on multivariate adaptive regression spline and OS-ELM
The IBVS system controls the end effector of the manipulator to move from the current pose to the desired pose based on the feedback of the current characteristics and the expected characteristics error. Given n image pixel feature points

where

Here,

where

However, during the operation of IBVS system, the acquisition of depth information requires good camera calibration, and the acquisition process is cumbersome. In addition, in the process of calculating Jacobian matrix, image feature points
The IBVS system based on MOS-ELM is shown in Figure 2. MOS-ELM is used to realize the mapping between feature errors e and

IBVS system based on MOS-ELM. IBVS: image-based visual servo.
The flow of the IBVS system based on MOS-ELM is described as follows. First, the current image feature error is obtained through the desired image feature and the current image feature. Then, the current
Experimental results and analysis
Experimental conditions
To evaluate the ability of our algorithm in dealing with regression problem, the proposed algorithm is performed on machine learning data sets and compared with the MARS, ELM, OS-ELM, and KOS-ELM algorithms. Then, the MOS-ELM algorithm is used in the visual servo control, and the relevant experiments are performed with the PUMA 560 six-degree-of-freedom manipulator as a simulation model. All experiments were performed on a computer with a CPU frequency of 2.5 GHz and RAM of 8 GB through MATLAB2015a software. The parameter settings of the simulation experiment are given in the next section.
Experimental parameter setting
Our experiment is primarily based on machine learning data sets and IBVS system simulation. The algorithm parameter settings for the regression experiments using machine learning data sets are shown in Table 1. For the ELM algorithm, the hidden layer node number is the set as that shown in Table 1. The hidden layer node number and the number of initialization samples are obtained by grid optimization, where the hidden layer node number is in the range of
Algorithm parameters.

Data sets.

In the IBVS simulation experiments, the data set used for training was obtained through simulating the Classical IBVS system in 17 different end effector postures, and the depth information was fixed at 2 m and the gain



Experimental result discussion
Regression problem experiment
To illustrate the excellent performance of MOS-ELM in the case of regression problems, the MARS, ELM, OS-ELM, and KOS-ELM algorithms were compared with our MOS-ELM algorithm. Test the regression ability of the algorithm using machine learning data sets California Housing, Fried, Auto MPG, and Metro Interstate Traffic Volume. 38,39 California Housing is a data set for predicting housing prices for linear regression. Fried contains 10 categories of features, and its data volume is 40,768. Auto MPG is a statistical measure of the fuel consumption of the urban cycle. Metro Interstate Traffic Volume is a forecast estimate of traffic volume. These data sets have very important application value, and the data features are relatively complex, which can be a good measure of the prediction accuracy of a regression model. This article uses these machine learning data sets to verify the prediction ability of the MOS-ELM proposed in this article. The experimental results of several of these algorithms on the regression problems of California Housing, Fried, Auto MPG, and Metro Interstate Traffic Volume data sets are listed in Table 3. The main indexes of algorithm performance include training time, training error and training error variance, and prediction error and prediction error variance.
Machine learning data sets regression problem experiment results.

OS-ELM: online sequential extreme learning machine; ELM: extreme learning machine; RBF: radial basis function. Boldface is the best result.
Considering the results shown in Table 3, regarding training time, we can observe that when the activation function is set as sigmoid, the ELM algorithm is the fastest among the four experiments. However, the training and prediction accuracy is not good. In terms of training error, the MOS-ELM (RBF) algorithm has the smallest error in the case of the Metro Interstate Traffic Volume data set, which shows that the algorithm has the excellent effect on the training error. In addition, the prediction error is also better than other algorithms. For the regression question California Housing, the prediction error of the MOS-ELM algorithm with the RBF activation function is 0.1378, which is the smallest among all the compared methods. For the regression question Fried, the prediction error of the MOS-ELM algorithm with the sigmoid activation function is 0.1525, which is smaller than other algorithms that are compared. For the regression question Auto MPG, the prediction error of the MOS-ELM algorithm with RBF activation function is 0.0854, which indicates some reduction compared with other methods. Further, in the regression question Metro Interstate Traffic Volume, the testing error of the MOS-ELM algorithm with RBF as the activation function is 0.0500, which is the smallest among all the algorithms. All these examples show that our MOS-ELM algorithm has a high testing accuracy.
Based on the variance values of the test errors in Table 3, we found that for four data sets, the testing error variance of the algorithms MOS-ELM (RBF), MOS-ELM (RBF), MOS-ELM (sigmoid), and MOS-ELM (RBF) are 0.0007, 0.0025, 0.0093, and 0.0027, respectively. From the above data, the prediction error of our MOS-ELM algorithm for the four machine learning data sets is the smallest among all the compared algorithms, indicating that our proposed algorithm has good stability.
Proposed IBVS system compared with other systems
The predicted and actual speed comparison of the visual servo system based on the MOS-ELM algorithm for the end effector speed are shown in Figure 3. From Figure 3, four of the six components of velocity are close to reality, while the other two components fluctuate slightly. Furthermore, the sixth component converges as well as the actual velocity. The experimental results show that our MOS-ELM algorithm can effectively predict the speed of the end effector and can be applied to the vision servo system with unknown and uncalibrated depth information. Figure 4 displays increment changes of the six manipulators’ joint angle. From Figure 4, it can be observed that the incremental change of the joint angle is smooth, and there is no oscillation, which indicates that this method can control the end effector movement smoothly from the initial position pose to the desired position pose.
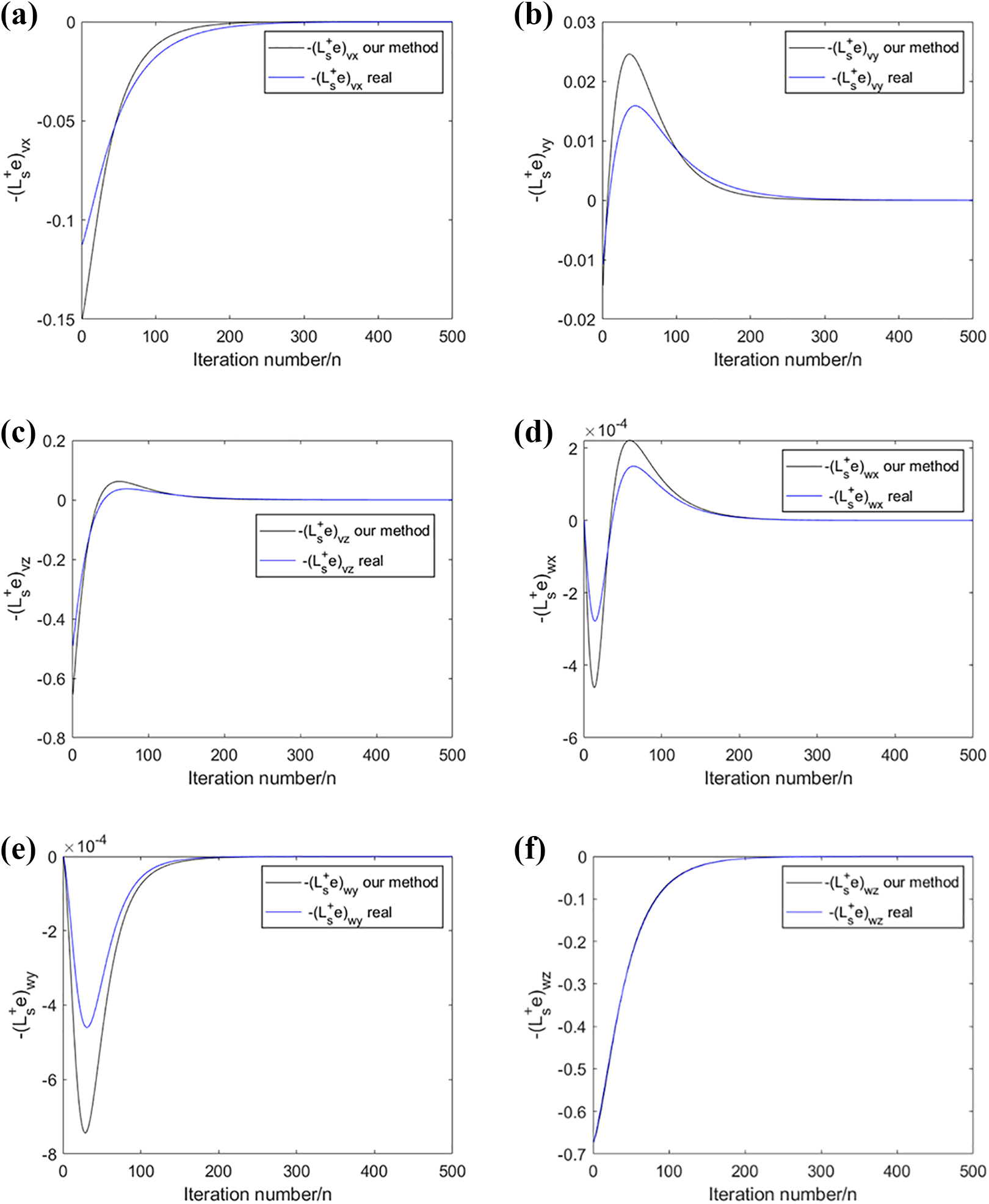
MOS-ELM predicted end effector speed compared with the actual speed. (a), (b), (c), (d), (e), and (f) are the speeds in the directions
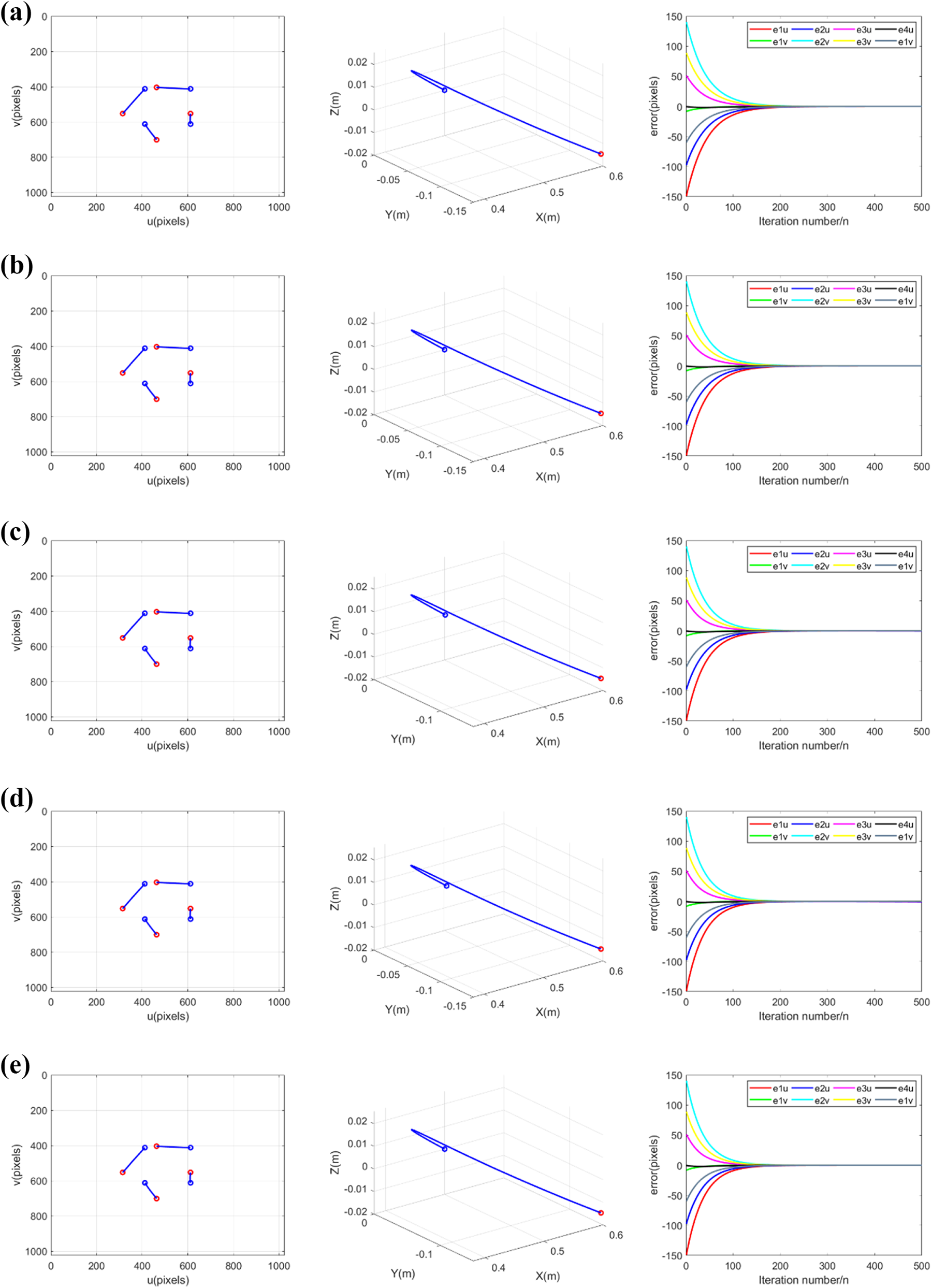
Manipulator visual servo simulation experimental results for (a) Classical IBVS, (b) ELM IBVS, (c) OS-ELM IBVS, (d) KOS-ELM IBVS, and (e) MOS-ELM IBVS, where the columns 1–3 represent feature trajectory (the red circles represent the initial features, and the blue circles represent the desired features), end effector trajectory (the red circle represents the initial pose, and the blue circle represents the end pose), and image feature error, respectively. IBVS: image-based visual servo; OS-ELM: online sequential extreme learning machine; ELM: extreme learning machine.
The MOS-ELM IBVS system was compared with the Classical IBVS, IBVS based on ELM, IBVS based on OS-ELM, and IBVS based on KOS-ELM. The comparative experimental results are shown in Figure 4, and the three performance indexes are shown in Table 4. The real-time performance of different IBVS system is assessed based on the convergence speed. In addition, the small cumulative error indicates that the convergence of feature errors is faster. The shorter end effector trajectory length provides a good indication that the redundancy motion of the end effector is lesser. Furthermore, the smaller accumulated error indicates that the convergence of feature error is faster. From Figure 4, the trajectory of end effector and error convergence for several other IBVS are similar. However, it can be found from Table 4 that the iterations of the IBVS convergence based on MOS-ELM are 218, trajectory length of end effector is 0.3838 m, and error accumulation is 8.74e+3. It should be noted that these results are the smallest of all the other methods. The smallest number of iterations indicates that the IBVS algorithm based on MOS-ELM has the fastest convergence speed, which reduces the time for the manipulator to reach the expected pose. The minimum trajectory length of the end effector indicates that the IBVS algorithm based on the MOS-ELM can reduce the distance that the manipulator moves in space, while increasing the speed with which the manipulator moves to the expected position. The lower error accumulation indicates that the IBVS system based on MOS-ELM can control the error oscillation better. It can be found from Table 4, the prediction error of ELM, OS-ELM, KOS-ELM, and MOS-ELM algorithm for the manipulator data sets is 9.38e−06, 6.62e−06, 6.32e−06, and 6.16e−06, respectively. Evidently, the MOS-ELM algorithm has the smallest prediction error.
Performance index results of MOS-ELM compared with other algorithms.

IBVS: image-based visual servo; OS-ELM: online sequential extreme learning machine; ELM: extreme learning machine.
Comparison on different IBVS system configurations
To show that the method proposed in this article also has good performance in different pose configurations, here we compare the experimental results of Classical IBVS and MOS-ELM IBVS in another pose. The configuration of IBVS is as follows



Figures 5 and 6 are the simulation results of the Classical IBVS and the MOS-ELM IBVS, respectively. Comparing the experimental results of Figures 5 and 6, MOS-ELM IBVS has a better curve in feature error convergence and manipulator joint angular velocity, and the trajectory of manipulator end effector is smoother than that of Classical IBVS. The three performance indicators of Classic IBVS and MOS-ELM IBVS are given in Table 5. The iteration times of the two methods are 277 and 137, respectively, and the trajectory length of the end effector of the Classical IBVS manipulator is much longer than that of the MOS-ELM IBVS, which further indicates that the method proposed in this article is also applicable to IBVS with different configurations.

Manipulator visual servo simulation experimental results for Classical IBVS, (a) feature trajectory (the red circles represent the initial features, and the blue circles represent the desired features), (b) end effector trajectory (the red circle represents the initial pose, and the blue circle represents the end pose), (c) image feature error, and (d) joint angular velocity. IBVS: image-based visual servo.

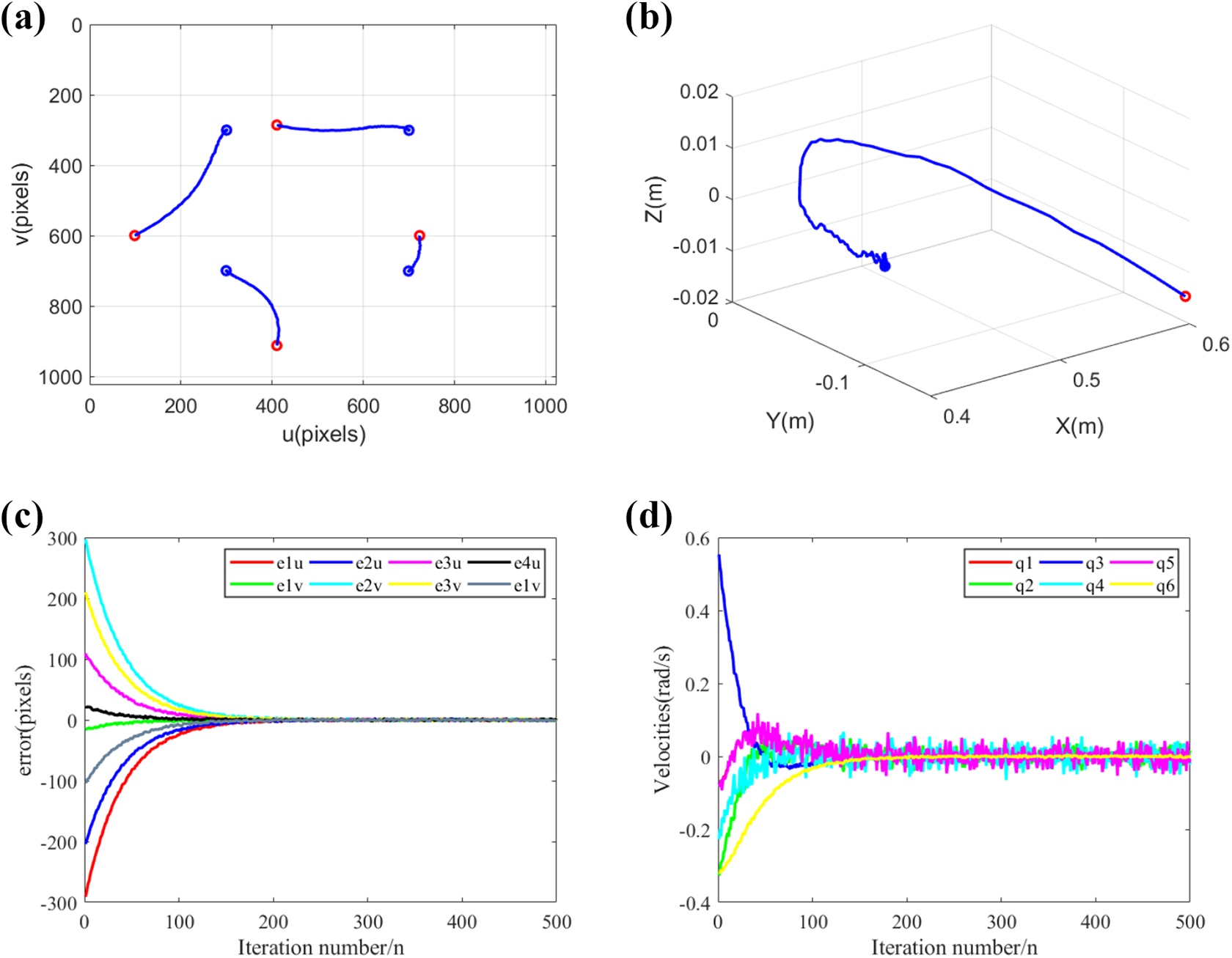
Manipulator visual servo simulation experimental results for MOS-ELM IBVS, (a) feature trajectory (the red circles represent the initial features, and the blue circles represent the desired features), (b) end effector trajectory (the red circle represents the initial pose, and the blue circle represents the end pose), (c) image feature error, and (d) joint angular velocity. IBVS: image-based visual servo; OS-ELM: online sequential extreme learning machine.
Comparison of performance index results between MOS-ELM IBVS and Classical IBVS.

IBVS: image-based visual servo.
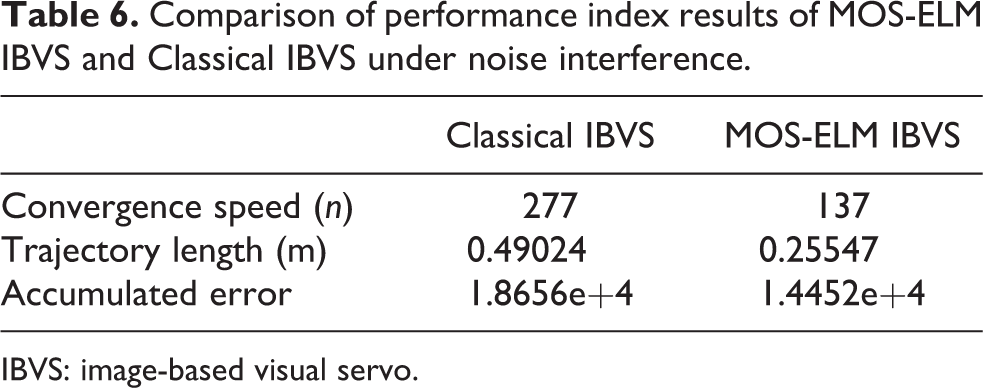
At the same time, to further demonstrate the robustness of the MOS-ELM IBVS method proposed in this article to the noise interference of feature points, the servo simulation experiments of the Classical IBVS and MOS-ELM IBVS under noise interference are also given in this section. During the experiment, uniformly distributed random noise interference is added to all image feature points, and the interference deviation is [−2, 2] pixels. Figures 7 and 8 are the experimental results of Classical IBVS and MOS-ELM IBVS under noise interference, respectively. It can be seen from Figures 7 and 8 that the Classical IBVS has shown poor performance after being disturbed by noise, and the trajectory of its end effector has become very unsmooth. Moreover, the motion of the joint angle of the manipulator has a large amplitude jitter, which shows that the Classical IBVS has poor robustness to noise interference. In contrast, the end effector of the MOS-ELM IBVS is relatively smooth, and the joint angle of the manipulator does not have a large jitter. The performance indicators of the two methods are given in Table 6. From Table 6, the lengths of the end effector trajectories of the Classical IBVS and MOS-ELM IBVS are 0.49024 m and 0.25547 m, respectively. The lengthening of the classic IBVS end effector trajectory is mainly caused by the jitter of the robotic arm. In addition, the total error overhead of MOS-ELM IBVS is smaller than that of Classical IBVS, which further indicates that using MOS-ELM to predict the product of pseudo inverse of image Jacobian matrix and image feature error can improve the robustness to noise interference and ensure the performance of IBVS control.
Experimental results of visual servo simulation of manipulator under noise interference of Classical IBVS, (a) feature trajectory (the red circles represent the initial features, and the blue circles represent the desired features), (b) end effector trajectory (the red circle represents the initial pose, and the blue circle represents the end pose), (c) image feature error, and (d) joint angular velocity. IBVS: image-based visual servo.

Experimental results of visual servo simulation of manipulator under noise interference of MOS-ELM IBVS, (a) feature trajectory (the red circles represent the initial features, and the blue circles represent the desired features), (b) end effector trajectory (the red circle represents the initial pose, and the blue circle represents the end pose), (c) image feature error, and (d) joint angular velocity. IBVS: image-based visual servo.
Comparison of performance index results of MOS-ELM IBVS and Classical IBVS under noise interference.
IBVS: image-based visual servo.
Conclusion
In this study, a regression algorithm (MOS-ELM) based on MARS and OS-ELM is proposed. First, the superiority of the MOS-ELM in regression problems is verified using machine learning data sets, which is then compared with MARS, ELM, OS-ELM, and KOS-ELM. Then, an uncalibrated IBVS system based on MOS-ELM is proposed and compared with the Classical IBVS, ELM IBVS, OS-ELM IBVS, and KOS-ELM IBVS. It is observed that the proposed algorithm solves the problem of accurate image Jacobian prediction and improves the robustness of the system to noise disturbances. The proposed method uses the MARS method to assess the importance of the features in the training samples and selects more important samples as the input features for the OS-ELM. By combining these two aspects, the feature dimensionality can be reduced, consequently reducing the computational complexity. The improved performance of the IBVS system with our MOS-ELM algorithm is proved by the performance analysis of three performance indexes including convergence speed, trajectory length, and cumulative error. Experimental results show that our algorithm is feasible and performs well when applied to IBVS systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Key R&D Program of Zhejiang Province (No. 2021C03013) and Zhejiang Provincial Natural Science Foundation of China (No. LZ20F020003).
Supplemental video
Supplemental video for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.