
Abstract
The parallel leg of the quadruped robot has good structural stiffness, accurate movement, and strong bearing capacity, but it is complicated to control. To solve this problem, a series connection of parallel legs (SCPL) was proposed, as well as a control strategy combined with the central pattern generator (CPG). With the planar 5R parallel leg as the research object, the SCPL analysis method was used to analyze the leg structure. The topology of CPG network was built with the Hopf oscillator as the unit model, and the CPG was the core to model the robot control system. By continuously adjusting the parameters in the CPG control system and changing the connection weight, and the smooth transition between gaits was realized. The simulation results show that the SCPL analysis method can be effectively used in the analysis of parallel legs, and the control system can realize the smooth transition between gaits, which verifies the feasibility and effectiveness of the proposed control strategy.
Keywords
Introduction
Legged robots have a wide range of applications in post-disaster rescue, field exploration, and military fields due to their good flexibility and strong environmental adaptability. In the last few decades, domestic and foreign scholars have done a lot of research on legged robots (such as biped robots, quadruped robots, hexapod robots, etc.), and have made important progress. Among them, quadruped robot has become a research hotspot in the field of robot due to its good adaptability, stability, and strong load capacity. Research mainly focuses on mechanical structure, motion control, and gait planning. The research of mechanical structure is mainly to optimize the leg structure. The leg structure mainly has three forms: series leg structure, parallel leg structure,1,2 and hybrid leg structure. Among them, the parallel leg structure has the advantages of good rigidity, accurate movement, and strong bearing capacity because of its closed-loop structure. At present, the closed vector polygon projection method, complex vector method, matrix method, and other analysis methods are commonly used in the kinematic analysis of the parallel leg structure. The research of motion control and gait planning algorithm has always been a difficult point, mainly because the parallel leg is composed of multiple joints, which may cause high-dimensional continuous control problems. Therefore, the design of the motion controller of the parallel legged quadruped robot becomes the key. At present, the motion control methods of quadruped robot mainly include: the control method based on static stability, the control method based on dynamic model, and the control method based on the biological neuromodulation mechanism and behavior characteristics. The static and stable control method is mainly based on the zero moment point (ZMP) theory to plan the gait trajectory of the robot. 3 But this kind of motion control method is difficult to realize complex motion. The control method of dynamic model mainly includes virtual model control and inverse dynamic control. 4 Teng et al. 5 proposed a quadruped robot control framework based on the fusion of the full-scale virtual model and the dynamic model. Yu et al. 6 proposed an adaptive fuzzy full-state feedback control. Among them, the motion control method based on the CPG has become the research hotspot of bionic control due to its ability to spontaneously generate stable signals and strong coupling ability.
In biology, CPG is a kind of neural network, which can generate rhythmic neural activities without receiving rhythmic input through the combined action of excitatory neurones and inhibitory neurones, thus stimulating the rhythmic movement of animals. 7 In the motion control of the robot, the biological CPG motion control characteristics are transformed into a mathematical model, which is more better than the traditional control method as being applied to the motion control of the robot.8,9 The oscillating unit models in the CPG control network can be divided into two categories: neuron-based models and nonlinear oscillator-based models. The former mainly includes Matsuoka 10 model, Kimura et al. 11 model, Rulkov 12 model, etc., while the latter mainly includes Kuramoto phase oscillator, 13 Van Der Pol relaxation oscillator, Hopf harmonic oscillator, etc. Among them, the Hopf oscillator can control the motion of the robot using the simple input parameters and the coupled output stable rhythm signal. The parameters are independent and the waveform is easy to adjust. Therefore, it is widely used in the CPG control model of the robot. 14 In CPG control network consisting of a Hopf oscillator, the generated signals are usually used for robot joint control, and the signal waveform determines the actual implementation trajectory of each joint angle in each cycle. There are two types of joint control of robot: position control and torque control. The former provides the CPG output signal to the desired joint angle of the feedback controller, 15 and the latter directly controls the motor to generate torque with the CPG output signal. 16 The CPG control method is applied to the robot control, and the result is good. The CPG algorithm has been used to realize the smooth transition between different gaits of the hexapod robot17,18 and walking under different terrains. 19 Liu and Zhang 20 and Liu et al. 21 realize the movement of a quadruped robot in different gaits by using a CPG control network composed of different oscillators. Liu et al. 8 and Santos et al. 22 applied CPG control strategy to the motion control of the biped robot.
In addition to the single CPG control, the combination of CPG and other optimization algorithms is also applied to robot motion control. Wang et al. 23 and Ajalloeian et al. 24 combined CPG with a Virtual Model Control (VMC) in a compound control method. Liu et al. 8 and Kasaei et al. 25 proposed a robot control strategy which combines CPG and Zero Moment Position (ZMP). Hasanzadeh and Tootoonchi 26 and Xue et al. 16 proposed a hybrid control strategy based on fuzzy control and CPG. Gay et al. 27 designed a controller that uses a neural network to receive external feedback within the CPG control system. Thor et al. 28 proposed a network based on the combination of CPG and Radial Basis Function (RBF) to realize online adaptive control.
In this paper, an analysis method based on SCPL is proposed for the leg structure of a planar 5R parallel quadruped robot, which converts the parallel leg mechanism into a series structure for analysis. A CPG control system with Hopf oscillator as the core is established to control the gait and gait transition of a quadruped robot. Through the co-simulation experiment, the feasibility of the SCPL analysis method and the stability and effectiveness of the control algorithm are verified.
The kinematic analysis of robot
Build mathematical model of the leg structure
The leg structure of the quadruped robot adopts a planar 2-DOF 5R parallel mechanism, which has the characteristics of high stiffness and strong load carrying capacity. The schematic diagram and prototype of the robot leg mechanism are shown in Figure 1. The leg structure of the quadruped robot is composed of five connecting rods, and the original moving parts are rods

The schematic diagram of the robot leg mechanism and prototype, (a) the schematic diagram of the robot leg mechanism, (b) the prototype of the quadruped robot.
The coordinate system
Location analysis
From Figure 1(a), the vector loop equation of the parallel leg can be obtained as:

The two
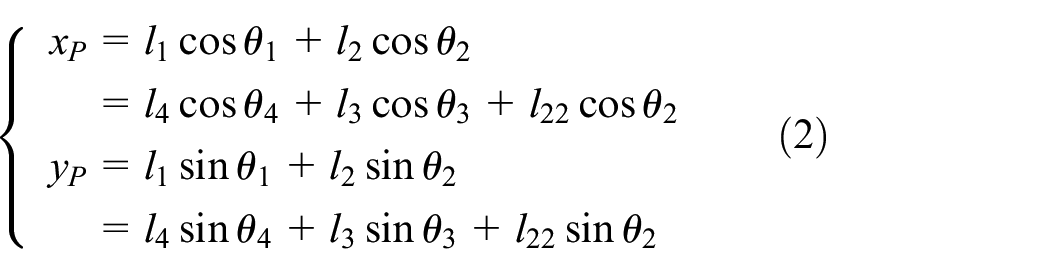
The joint angular displacement

where:

The joint angular displacement

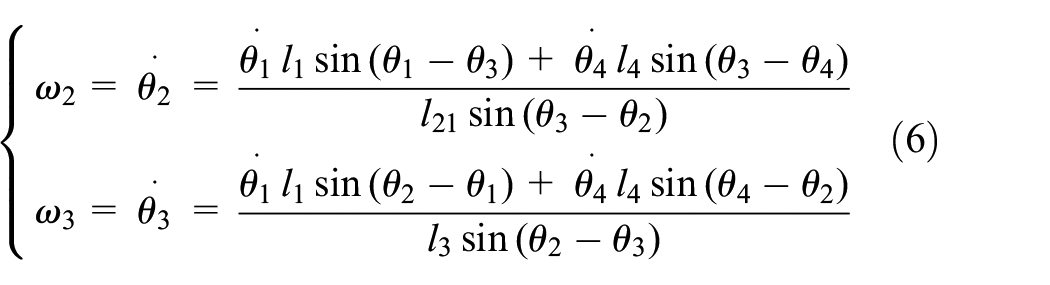
Velocity analysis
By taking the derivative of equation (2) with respect to time

The joint angular velocity
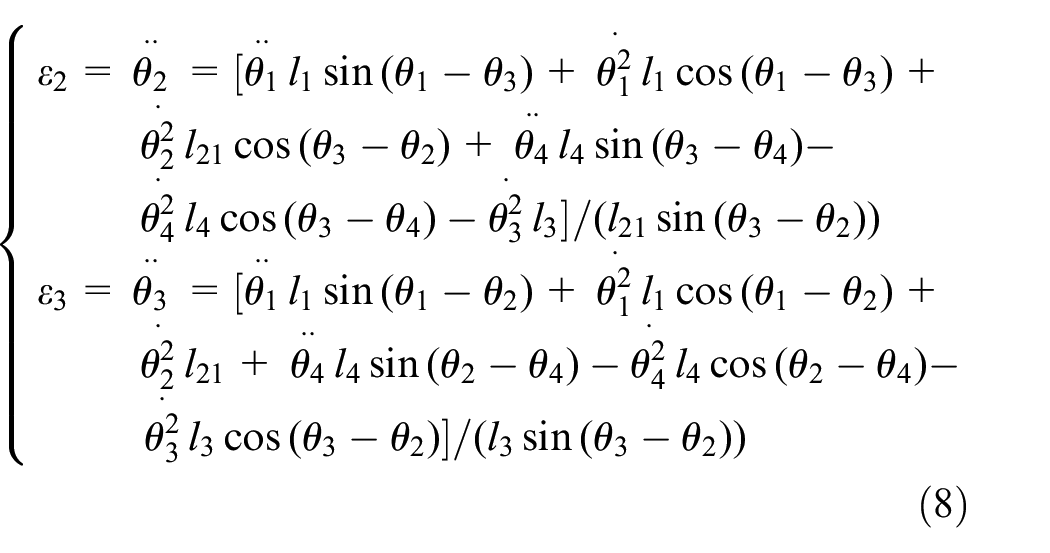
Acceleration analysis
By taking the derivative of equation (5) with respect to time

The joint angular accelerations
Series connection of parallel legs
According to equation (3), the variation of joint angular displacement

Series connection of parallel legs.
After the serialization of the leg structure, the influence of the rod
Built CPG control network model
CPG oscillation unit modeling
The Hopf oscillator has a fast conversion speed and strong robustness to disturbance. Therefore, it has a harmonic limit cycle with stable structure. Its parameters also have clear physical meanings. The frequency and amplitude of the output signal are independently adjustable, which can be used to generate the rhythm signal of a quadruped robot. In this paper, hopf oscillators are chosen as the core of CPG motion control system. Hopf oscillator is used in a single CPG oscillation unit, and its mathematical expression is as follows:

Where
The equilibrium point and limit cycle characteristics of the Hopf oscillator are analyzed. Set
where:

Equation (9) can be rewritten as:

Then the origin point
To determine the behavior of the orbit in the neighborhood of the singularity point

Then

O. Perron theorem is to linearize the nonlinear system, then the matrix is:

It is still the coefficient matrix corresponding to the linear part of equation (9).
Where the characteristic equation of

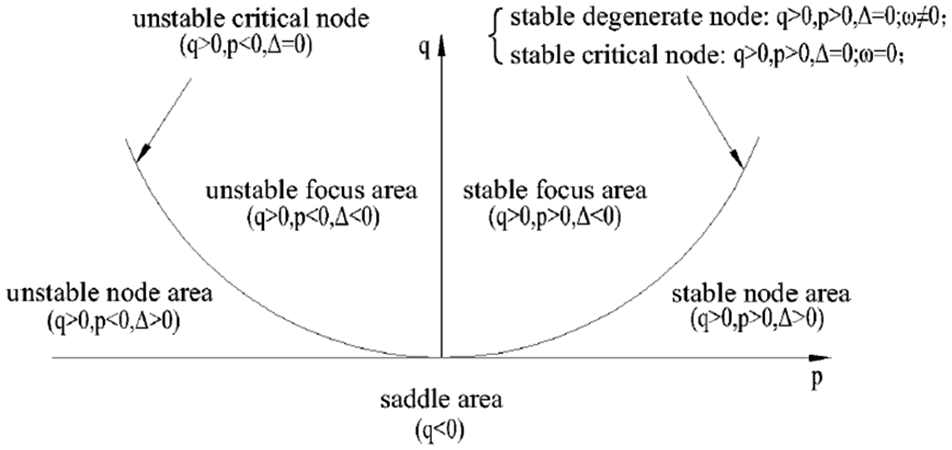
It can be known from equation (15) that

According to the
According to the parameter determination method shown in Figure 3, it can be quickly determined that the values of the three parameters of equation (9),
According to equation (11), when
Let the annular region surrounded by inner and outer curves

When

The limit cycle of the Hopf oscillator (
The nonlinear differential equations of Hopf oscillator are solved, and the state quantities are plotted in Figure 4. It shows that different initial values converge to the same limit cycle. Except for the singularities point
The Hopf oscillator outputs a stable periodic oscillation signal, while the movement of a quadruped robot is a periodic rhythmic movement. Therefore, the oscillation signal generated by the oscillator can be used for joint control of a quadruped robot. The rising edge of the output signal corresponds to the swing phase of the leg, and the falling edge corresponds to the stance phase of the leg, as shown in Figure 5.

The phase of leg joint.
Figure 5 shows that the rising edge and falling edge of the oscillation signal used for joint control have the same period, so that the period of the swing phase and the stance phase of the robot are equal within a gait period. Under different walking gaits, the legs are standing on the ground for different times in a gait cycle, so the load factor

where
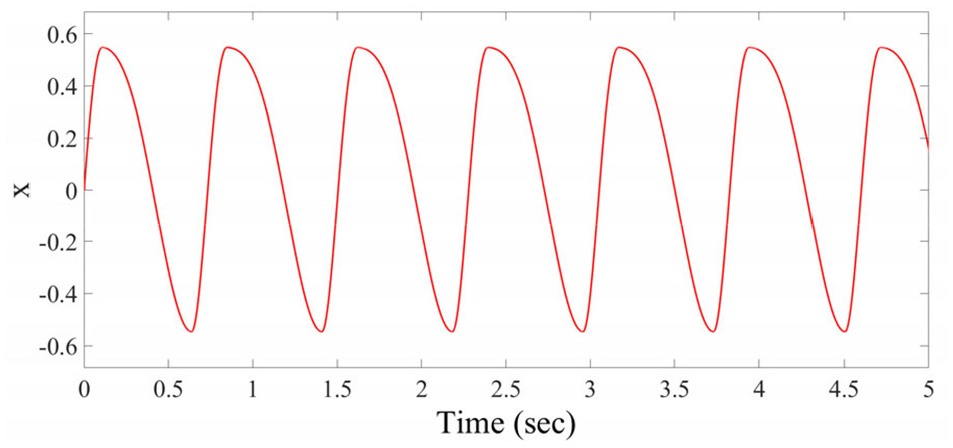
The output curve of state variable x when
CPG control network
Biological CPG is composed of several central neurons, which are composed of three basic interneurons: excitatory, lateral inhibitory, and terminal cross inhibitory. The neurons inhibit each other and can generate rhythmic signals and generate rhythmic movements through self-excited oscillations. Multiple oscillating units form a CPG network through phase coupling, and the different topologies of the network can change the output mode of the oscillating signal, to realize a variety of gaits.
CPG can automatically generate stable oscillating behavior in the absence of high-level control signals and external feedback, which can regulate the rhythmic movement of CPG. CPG control network is used to control the movement of a quadruped robot. It can not only adjust the phase difference between the legs, but also realize the phase coupling between the hip joint and the knee joint.
Since the planar 5R parallel quadruped robot has a total of eight active degrees of freedom, eight Hopf oscillators are used to construct a layered CPG control network to control the hip joint and knee joint of the four legs respectively, as shown in Figure 7. The first layer of the control network adopts a fully symmetric network topology structure, which forms the coupling relationship between each leg and hip joint. The second layer is composed of hip and knee oscillators in each leg to form a single leg internal coupling relationship. The output signals
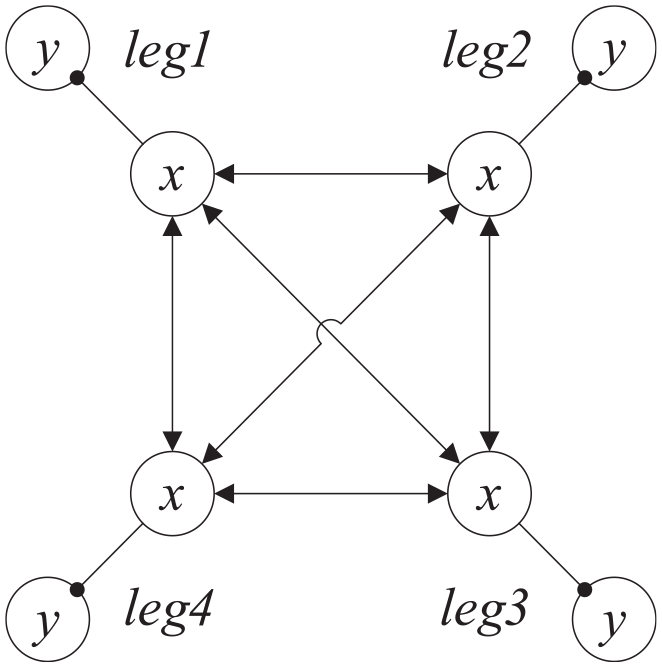
Topological structure of CPG network.
The mathematical model of CPG network topology composed of Hopf oscillators is as follows:
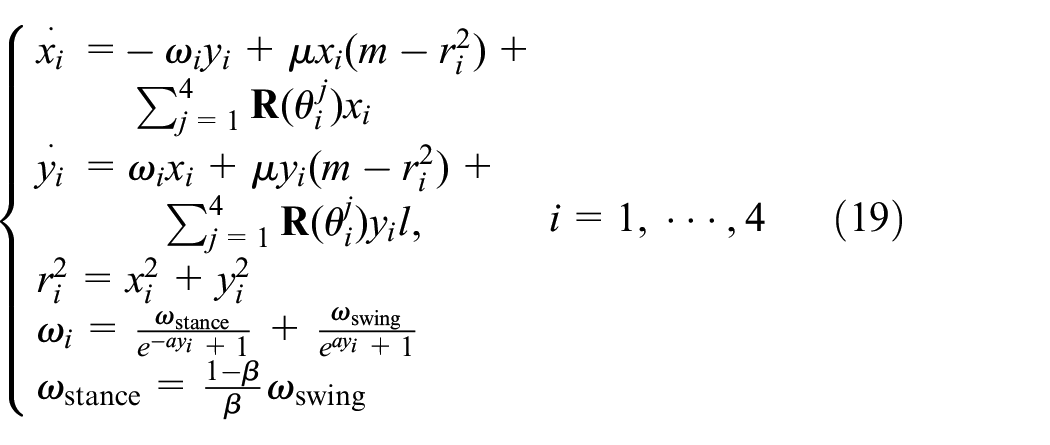
where
Joint mapping function
With the above analysis of the serialization of the legs, the signal
The leg structure of the quadruped robot after SCPL adopts the full knee symmetrical arrangement. In other words, knee joints are used for both front and rear legs. Through analyzing the gait of dogs, horses, and other animals, it shows that there is a fixed phase relationship between the hip joint and knee joint. In the pre-swing phase, as shown in Figure 8 interval
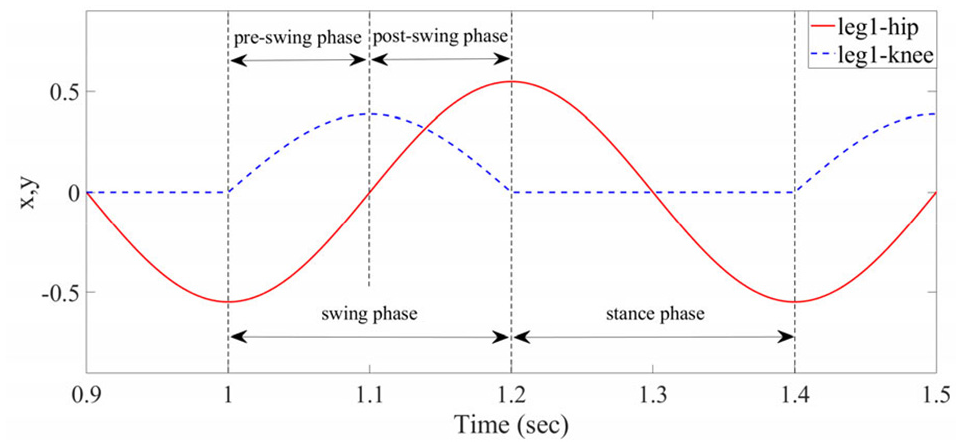
Phase relationship between hip and knee joint.
According to the phase relationship between the hip and knee joint during the swing phase and stance phase of the legs, the transformation equation of the joint angular displacement

where
The connection weight of CPG control network
As shown in Figure 7, the four oscillators formed by the CPG network topology at the hip joint are connected with full symmetry, and the oscillators are coupled to each other to ensure the stability and phase-lock relationship of the oscillator output signals. The connection weight matrix

where

The relative phase of walk and trot gait: (a) walk gait and (b) trot gait.
In Figure 9, in walk gait, the four legs lift alternately in the alternating order of
In summary, with the phase
Algorithm of gait smooth transition
In this paper, the common four-legged animal, dog, and horse movement gait are researched to study the smooth conversion algorithm of a parallel quadruped robot between walk and trot gaits.
To verify the effectiveness of the proposed CPG control system, the combination simulation platform of MATLAB/Simulink and ADAMS is used as the experiment platform. The CPG control system of the planar 5R parallel quadruped robot is built in MATLAB/Simulink. The virtual prototype of the robot is modeled in ADAMS. The co-simulation platform is completed through the connection of the control system and the virtual prototype model. The co-simulation platform provides an experiment simulation platform for the typical gait motion of the robot and the smooth transition simulation.
Walk gait
When the quadruped robot moves in the walk gait, the CPG model parameters are set as follows:
The joint control signal during the walk gait: (a) the hip joint control signal of the four legs during the walk gait and (b) the joint control signal of the single leg during the walk gait. Note: To facilitate observation, take the simulation time of

The moving simulation during the walk gait: (a) leg 1 lifting, (b) leg 3 lifting, (c) leg 2 lifting, and (d) leg 4 lifting. Note: The legs described in each picture correspond to the red and blue marks.
Figure 12 shows the displacement curve of the body’s centroid in the direction of the coordinate axis

The displacement curve of the centroid during the trot gait.
Trot gait
When the robot moves in the trot gait, the CPG model parameters are set as follows:

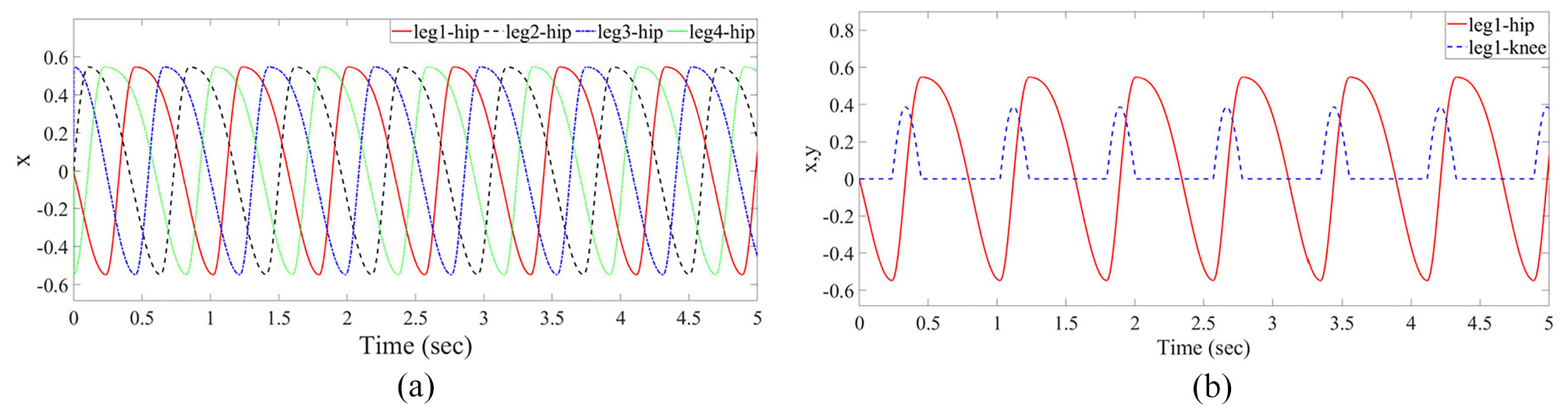
The joint control signal during the walk gait: (a) the hip joint control signal of the four legs during the trot gait and (b) the joint control signal of the single leg during the trot gait. Note: To facilitate observation, take the simulation time of
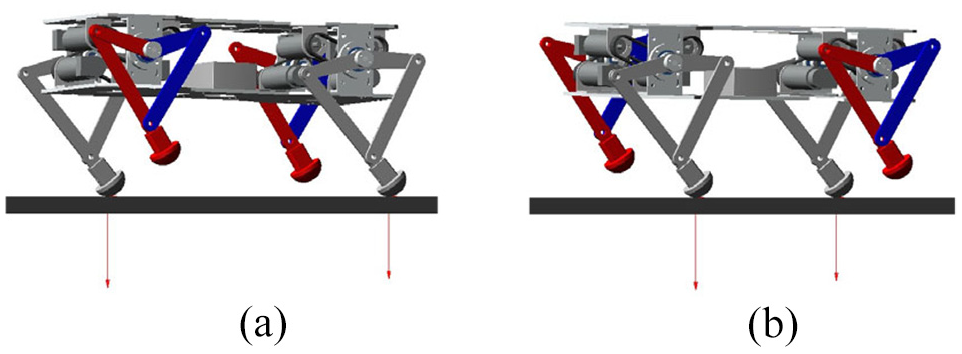
The moving simulation during the trot gait: (a) leg 1&3 lifting and (b) leg 2&4 lifting. Note: The legs described in each picture correspond to the red and blue marks.
Figure 15 shows the displacement curve of the body’s centroid in the direction of

The displacement curve of the centroid during the trot gait.
Smooth transition of Walk → Trot → Walk gait
To reduce energy consumption when moving on the ground, quadrupeds need to change their forward speed and movement gait according to the actual situation. The energy consumption of the quadruped robot is also the main reason affecting its development. Therefore, the gait of the robot should be converted according to the actual environment. In this paper, the gait conversion of the robot is realized by changing the network characteristics of CPG. In the equation (21), it shows that the connecting weight matrix

The hip joint control signal of the four legs during the transition of walk → trot → walk gait.
Figure 17 is the displacement curve of the body’s centroid in the direction of

The displacement curve of the centroid during the transition of walk → trot → walk gait.
transition of walk → trot → walk gait displacement in
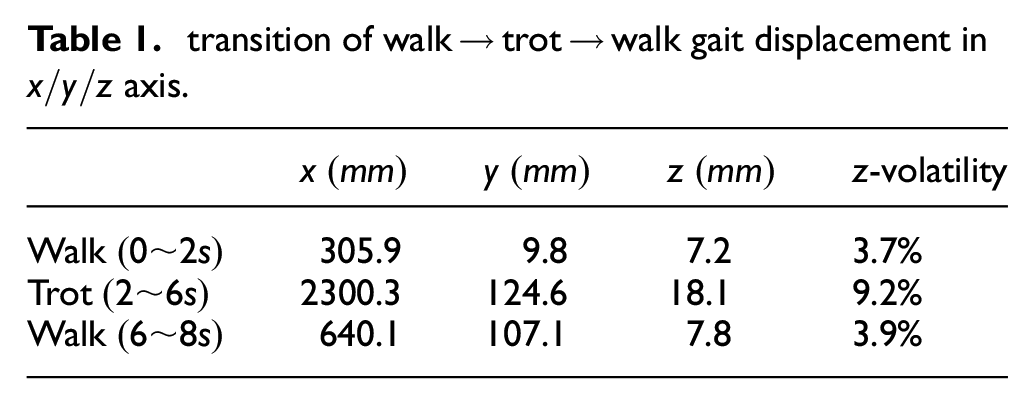

Table 1 shows that in the process of robot simulation, there is a large lateral deviation when it moves in the trot gait. Through the analysis of the simulation process and the deviation curve in

The displacement curve of the centroid in the

The displacement curve of the centroid in the
The break points and phase changes in the output signal during the gait conversion process should be avoided to reduce the impact on the mechanical and electrical systems of the robot. With continuous adjustment of the phase

The effectiveness and reliability of the continuous regulation method mentioned in equation (22) are verified through simulation tests. During the smooth transition of “walk → trot → walk” gait, the initial values of CPG model parameters are consistent with those of the gait transition. The simulation results are shown in Figures 20 and 21. Smooth gait transitions can realize. Figure 21 shows the smooth transition process of the robot gait.
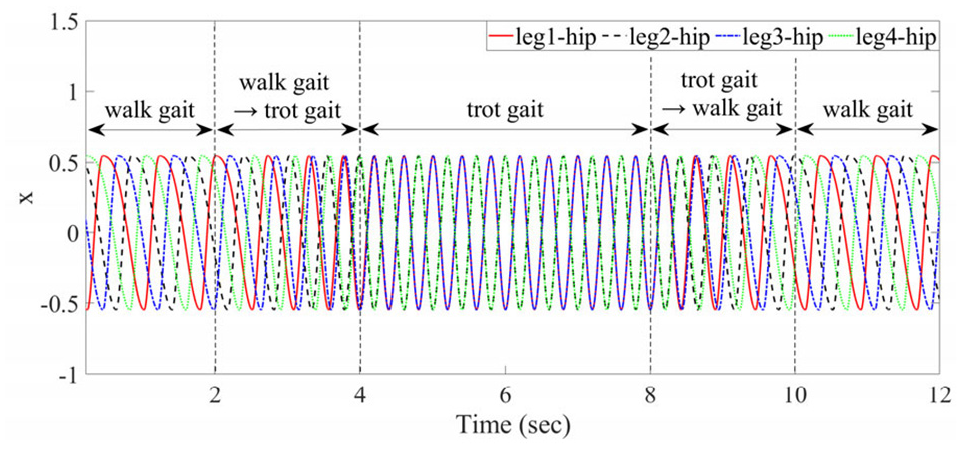
The hip joint control signal of the four legs during the smooth transition of walk → trot → walk gait.

The moving simulation during the smooth transition of walk → trot → walk gait: (a) walk gait (
The smooth gait transition process of “walk → trot → walk” can be divided into two steps: the first step is the smooth transition of “walk → trot”“walk → trot” gait. The robot first moves in the walk gait, and then the legs are out of phase, and the leg lifting sequence is
The second step is the smooth transition of the “trot → walk”“trot → walk”“trot → walk” gait. The robot uses the trot gait within the
Figure 22 shows the displacement curve of the body’s centroid in the direction of

The displacement curve of the centroid during the smooth transition of walk → trot → walk gait.
smooth transition of walk → trot → walk gait displacement in

Table 2 shows that the forward displacement of the robot during the “walk → trot”“walk → trot” gait transition is much lower than that of during the transition of “trot → walk”“trot → walk” gait. By analyzing the velocity and displacement curves of the robot’s centroid in the forward direction in Figure 23, the average velocity is

The velocity and displacement curve of the centroid in the
Conclusions
The main contribution of this paper is to use the closed vector polygon projection method to analyze the kinematics of the parallel legs, and propose a series analysis method of the parallel legs to simplify the processing of the parallel legs. The characteristics of the balance point and limit cycle of the Hopf oscillator are analyzed. In view of different walking gait, the leg stance time in a gait cycle is different, the oscillator frequency is improved, and the duration of the swing phase and the stance phase are adjusted. According to the characteristics of the Hopf oscillator, the motion of the robot is controlled by the oscillator coupling output stable rhythm signals. Based on the biological CPG control mechanism, a CPG control system with Hopf oscillator as a unit is successfully constructed to realize the four-legged coordinated motion control of a planar 5R parallel quadruped robot. Combining the leg raising laws of walk and trot gaits, the phase determination conditions between each leg are obtained. And then through the continuous adjustment of the control parameters, the continuous change of the phase relationship between the oscillators is realized. It solves the situation that the joint control signal breaks when the asynchronous state changes, reduces the impact on the mechanical and electrical system when the breakpoint occurs, ensures the continuity of motion, and realizes the smooth transition between the asynchronous states. In the simulation experiment, the stability of the motion and the smoothness of the gait transition were demonstrated in the two gaits, which verified the feasibility of the analysis method and the effectiveness of the control strategy.
In future work, intelligent optimization algorithms will be combined to improve the robot’s adaptive walking control under unstructured terrain, and low-cost sensors will be used to detect the body’s attitude and ground contact. At the same time, the effectiveness of optimized algorithms and low-cost sensor detection will be verified on physical prototypes.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (No.51965029)