
Abstract
Recent developments in driving mode have heightened the need for quadruped robots. However, it is still a challenge to improve the dynamic characteristics. This paper makes a comprehensive review of the quadruped robot driving mode, from two aspects: hydraulic drive and motor drive. The application of hydraulic drives in quadruped robots is relatively mature. As motor performance is improving, interest in motor driving mode for quadruped robots is growing rapidly. Specific quadruped robots of milestone significance are presented in different driving modes. The performance in load capacity and motion characteristics, in different driving modes, are compared. Finally, the research difficulties in the field of quadruped robots are analyzed, while future development of the quadruped robot shows high prospects. The purpose of this paper is to summarize and analyze the previous research results and provide useful guidance for robot designers in developing more efficient driving modes for quadruped robots.
Introduction
At present, mobile robots are a research hotspot, while in certain complex and dangerous tasks, mobile robots are already used, instead of people. For example, rescue and relief, anti-terrorism and explosive disposal, field exploration, etc. Mobile robots can be divided into foot robots, wheeled robots, and tracked robots. However, more than 50% of the outdoor land surface is covered by rugged hills or low-lying wet swamps, which are not suitable for wheeled or tracked robots to move across. In these cases, the foot robot exhibits irreplaceable advantages over wheel and track robots. The foot robot can use isolated ground support points, instead of the continuous ground support region required by a wheeled robot. It can choose the optimal support point on the current ground type, being more able to adapt to uneven ground, with stronger mobility and better adaptability. Moreover, the multiple degrees of freedom of the leg part of the robot foot provides good selectivity and flexibility, characteristics that give the robot foot absolute advantages in an unstructured and uncertain environment. 1
According to the number of feet and their motion and control characteristics, foot robots are divided into biped, quadruped, and multi-legged robots. Among them, the quadruped robot is a kind of robot that was inspired by the structural characteristics and motion mode of quadruped animals. It not only has better stability and load ability than the biped robot, but also has wider leg motion space than the multi-legged robot. It reduces the redundancy and complexity of the mechanism, while it can walk slowly on complex terrain, in static walking mode. Therefore, the quadruped robot has attracted much attention and has become a central topic of robot research. The study of key technologies in quadruped robots is of great theoretical significance and practical value.2,3
The key technologies of the quadruped robot include many aspects, such as mechanism, bionics, driving mode. Specifically, the driving mode has a crucial impact on the performance of the whole machine. Quadruped robots with different driving modes usually show significant differences in structural design and overall dimensions, as well as load capacity and motion characteristics, cost, and other factors that are closely related to the driving mode. In conclusion, the research on the driving mode of quadruped robots will become an important development trend in the robotic field.
This paper is organized as follows: the second chapter includes a comprehensive overview of the driving modes of the quadruped robots. The third chapter describes a multi-aspect comparative analysis of different driving modes. The fourth chapter illustrates the technical difficulties in the driving modes of the quadruped robots. The fifth chapter is about the future development of quadruped robots. At the end of the paper, there is a summary and issues for future development.
Research status of quadruped drive
Different driving modes of quadruped robots have different effects on the whole structure layout, load capacity, and control mode. This chapter provides a comprehensive overview of the driving modes of the quadruped robots. First, the driving mode of a quadruped robot can be distinguished into two categories: hydraulic drive and motor drive, while the motor drive mode is divided into four aspects: series elastic drive, motor integrated gearbox drive, motor direct drive, and steering engine drive. Following, for each driving mode, the representative quadruped robots are listed and analyzed.
Hydraulic drive mode
The application of hydraulic drives in quadruped robots is quite mature. The working principle lies on the internal combustion engine driving the piston pump to rotate and exert pressure on the hydraulic oil, to form a closed hydraulic oil circuit. According to the command parameters, issued by the current motion control system, the hydraulic actuator can achieve the power output, required from each limb, with the help of the pressure regulating the function of each electro-hydraulic servo valve. 4
The research on the hydraulically driven quadruped robot was initially carried out in the United States. In the 1960s, the walking truck, developed by General Electric Company in the United States, was the first hydraulic-driven quadruped robot. 5 The robot was 3.3 m high and weighed 1400 kg. The operator controls each leg of the robot, by controlling the handle and pedal. The robot can execute the process of walking slowly on flat ground, pushing obstacles, and walking on piles of woodblocks. In the fall of 2005, Boston Dynamics first disclosed its bionic quadruped robot, BigDog (Figure 1(a)), which was in development for more than ten years. At that time, it attracted attention and generated hot discussion worldwide on the Internet. The key to the outstanding movement ability of BigDog is the use of a hydraulic actuator as the joint driving component, fundamentally improving some defects of the traditional hydraulic system, as well as the clever and reasonable integration of the hydraulic actuator and the quadruped mechanism, forming the strong and flexible perfect body of BigDog.6–8 After the birth of BigDog, MIT and Boston Dynamics company developed the next generation of hydraulic quadruped robots more rapidly. They released LS3, 9 cheetah, wildcat, spot, 10 and others with different characteristics, successively. Titan Xi11–13 (Figure 1(b)), a quadruped robot, developed by Hirose Laboratory of Tokyo University in 2007, is equipped with large-scale hydraulic driving components, with a total mass of 6800 kg and is designed to perform static and stable walking on flat surface and slopes. Since 2007, the laboratory of the dynamic leg system of the Italian Institute of technology has developed three hydraulic quadruped robots HyQ14–16 (Figure 1(c)), MiniHyQ, 17 HyQ2Max18,19 (Figure 1(d)), to study the running, jumping and obstacle surmounting ability of quadruped robots. Jinpoong20–22 (Figure 1(e)), a hydraulic driven quadruped robot, developed by the Korea Institute of industrial technology in 2014, has a more compact structure, compared to the old version of the quadruped robot. Since 2011, China has invested more in the research of the quadruped robot, as many Chinese universities have developed their robots, aiming to promote the development of hydraulically driven quadruped robots. For example, SCalf23,24 (Figure 1(f)), developed by Shandong University, has a load capacity of 80 kg and a maximum running speed of 1.8 m/s. The self-weight of the Baby Elephant25,26 robot, developed by SJU, is about 130 kg, with an additional load of 30 kg. It can achieve speed up to 1.8 km/h and it can walk on different terrains with a maximum load of 100 kg. In addition, quadruped robots, developed by the BIT 27 and the National University of Defense Technology, 28 also show good performance.
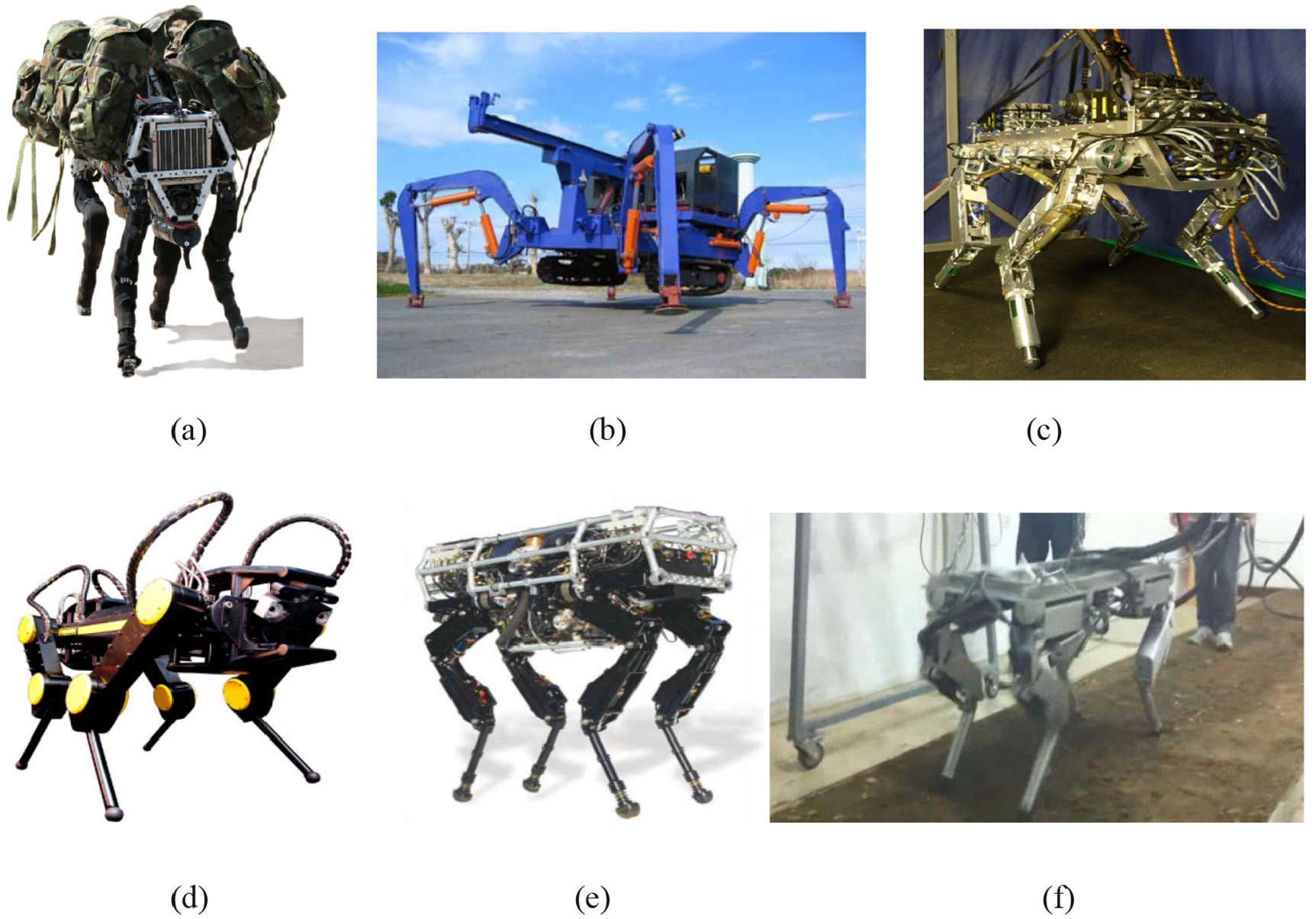
Quadruped robots driven by hydraulic drive mode: (a) BigDog, (b) Titan Xi, (c) HyQ, (d) HyQ2Max, (e) Jinpoong, and (f) SCalf.
Motor driving mode
Besides the hydraulic driving mode, the motor driving mode is widely used in quadruped robots, where legs repeatedly interact with the ground, in the form of high-intensity interaction on uncertain terrain and fast leg stepping. These events put forward unique and often conflicting requirements of the design of an electromagnetic actuator. Therefore, when selecting electromagnetic components and transmission, many trade-offs are needed 29 (Figure 2(a)).

(a) Three different electromagnetic (EM) actuator concepts and (b) simplified models of series elastic actuators.
Series elastic drive
In general, due to the limitation of electric motors, the torque transmitted by these motors is relatively low, considering their size, and weight. In order to increase the torque, a reducer with a high reduction ratio is used, thus limiting the maximum joint speed. Such systems tend to produce instantaneous high torque peak when they move on uneven terrain and will eventually lead to gear failure when they exceed the maximum torque limit. The designers usually combine the micromotor with the harmonic drive unit, composed of chain drive or belt drive and linear compression spring, to avoid these peak forces. The compliance output of power transmission and the joint is realized, lowering the requirement of the hardware performance of the controller. The driving mode, similar to the combination of this kind of motor and flexible structure, is called elastic series driving.30,31 The respective basic structure model is shown in Oh and Kong 32 (Figure 2(b)).
The Doggo 33 (Figure 3(a)), developed by Stanford University, uses a driving structure that combines a DC motor with a pulley, to achieve the universal performance index of the existing robot’s leg, which fully demonstrates the superior performance of the series elastic drive. This drive was also used in Warp1,34–36 a quadruped robot that was unveiled by the KTH Royal Institute of Technology, in 2001. Each leg is driven by an actuator system, consisting of a DC motor, a harmonic drive gear, and a “wire and pulley drive.” Scout II,37–39 a quadruped robot developed by McGill University in Canada, is driven by a hip motor, while the leg assembly includes a lower leg and an upper leg, connected by springs to form a compliant prism. StarlETH40–42 (Figure 3(b)), developed by Zurich Federal Institute of Technology, consists of three series elastic actuators in its legs. The motor is combined with a harmonic gear drive unit and connected by a chain and a cable to a linear compression spring, to minimize the inertia of the thighs and legs, minimizing impact loss. The KOLT43,44 (Figure 3(c)) quadruped robot, developed by Stanford University, connects the electric motor to the hip structure with a synchronous belt, to achieve power transmission. The ANYdrive drive unit, on the ANYmal45–47 (Figure 3(d)) quadruped robot, is used to realize the integration of series elastic drive structure, ensuring excellent mobility and motion ability of the quadruped robot, in a compact structure. An electrically driven flexible joint, with series elasticity, is designed by Hebei University of Technology (Figure 3(e)), suitable for the leg configuration of the quadruped robot. The flexible joint is designed by parallel positioning of the motor with reducer and the elastic unit, thus avoiding the problem of a long direct connection of motor reducer, and producing something more suitable to the leg configuration design of quadruped robot. 48

Quadruped robots driven by series elastic drive: (a) Stanford Doggo, (b) StarlETH, (c) KOLT quadruped robot, (d) ANYmal, and (e) flexible mechanical leg prototype experimental platform.
Motor integrated gearbox drive
In the case of a motor-integrated gearbox drive, the torque generated by the motor can be amplified by the gearbox, to meet the needs of motion. The control accuracy and shape size of the quadruped robot is satisfactory.
The pet robot MUTANT 49 (Figure 4(a)) with a high gear reduction ratio, developed by Sony in 1998, consists of a DC motor, five gears, a potentiometer, and a motor driver chip. In Tekken50,51 (Figure 4(b)) quadruped robots, each leg is driven by three DC motors, via gearboxes with deceleration ratios of 15.6, 18.8, and 84, respectively. HuboDog 52 (Figure 4(c)) uses a reasonable structure setting, to integrate high output power motors with gearboxes with high gear reduction ratios, to achieve high performance. The same drive is also commonly used in humanoid biped robots, such as Toyota humanoid robot, 53 ASIMO,54,55 and HRP robots.56–58
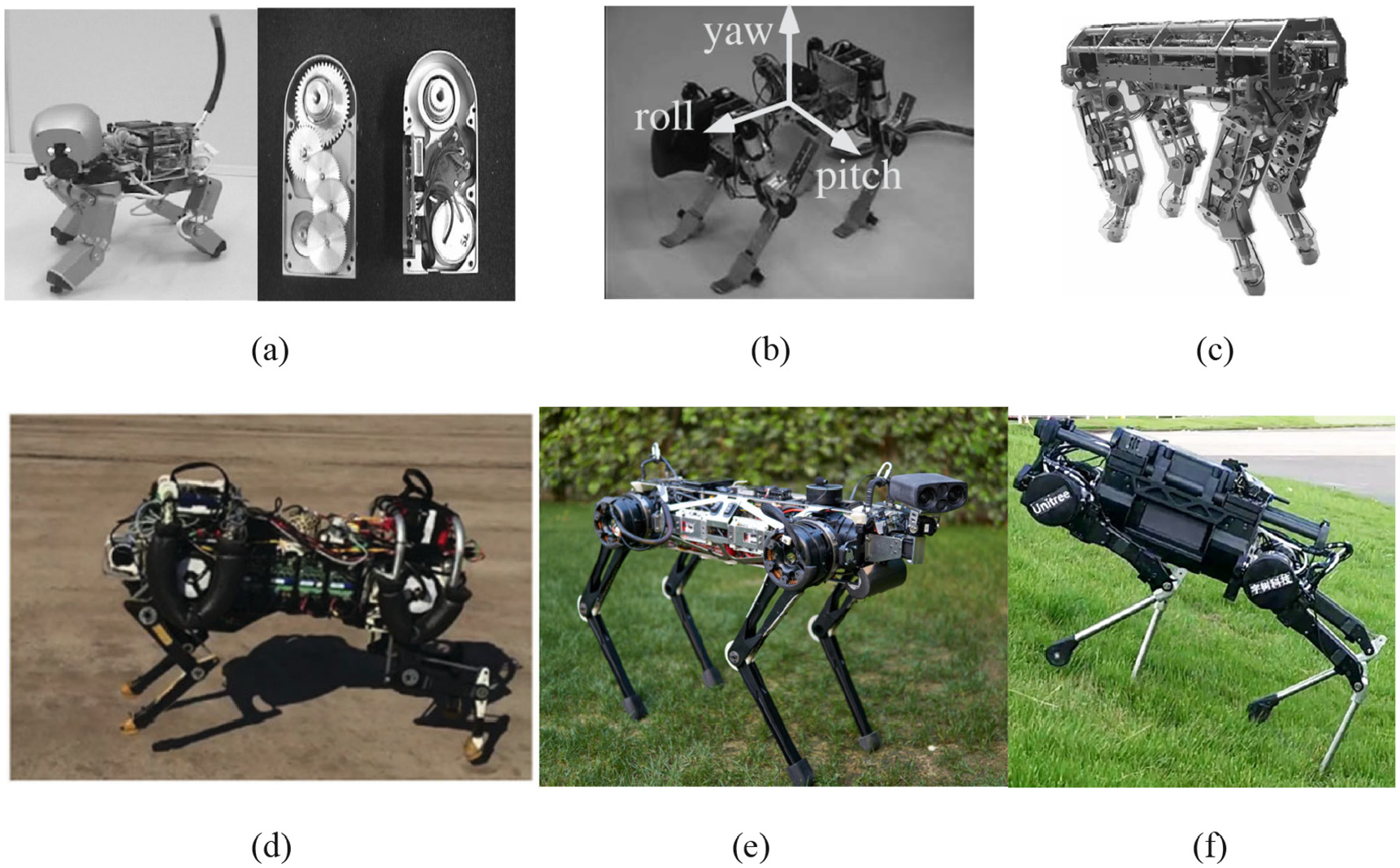
Quadruped robots driven by a motor integrated gearbox drive: (a) MUTANT, (b) Tekken, (c) Hubodog, (d) MIT Cheetah 2, (e) MIT Cheetah 3, and (f) Unitree Laikago.
The proprioception actuator is coaxially integrated with the motor and the planetary gear train. It has suitable torque output, high torque density, and is capable of force control in applications with highly dynamic environmental interactions. 59 Cheetah, 60 Cheetah 2 61 (Figure 4(d)), and Cheetah 362,63 (Figure 4(e)), developed by MIT, all adopt customized proprioception actuators as driving units. Laikago, 64 China Unitree, and “Jueying,” Zhejiang University, adopt similar driving modes and show good motion performance.
Direct motor drive
Motor direct-drive means that the driving unit of the quadruped robot abandons the use of gears, belts, chains, or other reducers, to amplify the torque generated by its motor, while it simply relies on its good structural design and motor selection, to achieve motion. Its advantage is that, by removing the gearbox, the mechanical stability and mechanical efficiency can be improved, while the structure becomes more compact. The ghost Minitaur 65 (Figure 5(a)), developed by ghost robotics company, adopts a unique leg design of 5-bar motion (Figure 5(b)) and direct drive of the motor, exhibiting excellent performance in running, jumping, and other sports. 66 Researchers from Google, the University of California, Berkeley, and Georgia Institute of Technology have built a quadruped robot, based on Minitaur and named “Rainbow Dash.” 67 Based on the advantages of motor direct drive control and structure, “Rainbow Dash” realizes automatic control strategy in a short time, with no prior knowledge of the environment.

The DD robots: (a) Minitaur and (b) 5-bar kinematic leg design.
Steering engine drive
The different quadruped robots, suitable for desktop level, as well as the quadruped robots in the laboratory, mostly use the steering engine as the driving mode. In a standard steering gear system (Figure 6(a)), the motors are small in size but can produce huge torque. For example, the Futaba S-148 68 is capable of 42 oz/inch, which is very powerful for its volume. The steering gear can also adjust the power, thus the respective energy consumption, according to the load at each time instant, requiring lower energy for lighter loads. In the structure design of the quadruped robot BISAM,69–71 the steering engine is used to drive the ball screw, used for power transmission. The quadruped robot (Figure 6(b)), developed by Azhar Australia Saputra 72 and others, driven by a steering engine, has successfully climbed the vertical ladder of Quadruped Robot, executing an effective algorithm. The steering engine controlled Mini quadruped robot Tsuki 73 (Figure 6(c)), developed by Lingkang Zhang, A & K robotics company, only used the position control method to achieve a very high movement speed. In the test, Tsuki achieved a motion speed of up to 1 m/s, demonstrating that the quadruped robot with a servo motor can also achieve high-efficiency motion tasks.

Quadruped robots driven by a servo motor drive: (a) actuator driving principle, (b) ladder robot, and (c) Tsuki.
Comparison and analysis of driving modes
Quadruped robots with different drive modes show different performance in many aspects, such as size and motion characteristics. The comparison and analysis of the driving modes of various quadruped robots are useful in selecting appropriate driving modes under different environmental conditions. In this chapter, quadruped robots with different driving modes are compared and analyzed, from the aspects of load capacity, motion characteristics, gait performance, overall structure, and the research extent published. The details follow in the next sections.
Comparison and analysis of load capacity and motion characteristics
The representative quadruped robots in each driving mode category are included in the survey, and their basic parameters are listed in the Table 1 below.
Index comparison of quadruped robots with various driving modes.

BL: body length (m); H: body high (m); W: robot weight (kg); PL: payload (kg); V: maximum speed (m/s); PLC: payload capacity (%), payload/weight; NS: normalized speed, maximum speed/body length; NWC: normalized work capacity, normalized speed × payload capacity; DoF, degree of freedom.
Summary and index comparison.
On the whole, the overall dimensions and weight of the hydraulic driven quadruped robots are larger than those of the motor-driven ones, due to the complicated system configuration of the hydraulic drive. However, the driving mode determines the load capacity and motion characteristics of the quadruped robot. Considering that the application stage of the quadruped robot, driven by the steering engine, stays in the desktop laboratory, it is not a representative case study. The other three representative quadruped robots are selected to compare their speed and load capacity. As shown in Figure 7, in terms of maximum running speed, motor integrated gear is weaker than the other two driving modes; but the excellent motion ability of Cheetah 2 alone leads the optimization of quadruped robots to such driving mode in the future. According to the normalized speed, the quadruped robot with hydraulic drive and series elastic drive shows more stable motion characteristics, which at present makes this kind of driving mode more suitable. Regarding the aspect of payload, the quadruped robot with hydraulic drive shows superior performance, which benefits from the characteristics of hydraulic driving power foot and stable transmission. Due to the huge weight of the hydraulic quadruped robot, compared to the standard payload capacity, its load capacity is not excellent.

Performance comparison of three different driving modes. Blue bar: hydraulic drive; Orange bar: series elastic drive; Gray bar: motor integrated gear reducer driven. A typical quadruped robot is selected to make a performance comparison.
The load capacity and motion characteristics of a quadruped robot often determine its application prospect. Taking BigDog as an example, although its overall weight is large, its excellent load capacity and motion characteristics are enough to ensure its wide application in material transportation, field exploration, etc. Therefore, choosing the appropriate driving mode to ensure adequate load capacity and appropriate motion characteristics, considering the application environment of the quadruped robot, is an issue to be explored in the research of this field.
Comparison and analysis of motion mode of quadruped robot
The motion mode of the animal foot is referred to as “gait,” which represents the walking mode with a fixed phase relationship between the legs. 74 The gait of different quadruped animals has different forms, just as the quadruped robot with different driving modes can achieve different gaits. In the slow walking state, the quadruped is in a relatively stable three-legged support state at each step, which is called crawl gait. 75 Faster than the crawl gait is trot gait and pace gait, where some large quadruped galloping gait can produce the highest speed. In theory, quadruped robots can achieve all the above gaits, but considering the quality or power of the drive system, the performance of the quadruped robot, driven by hydraulic pressure, is not as high as that of the quadruped robot driven by a motor. First of all, the hydraulic quadruped robot can support trot and gallop gait with great difficulty, due to the high quality of the hydraulic system. In addition, a high-speed motion will make the quadruped robot difficult to control, due to its large inertia, while the whole machine becomes unstable. All of these factors limit the excellent gait performance of the hydraulically driven quadruped robot. Compared to the hydraulic drive quadruped robot, the quadruped robot driven by a motor shows better gait performance. At present, the motor-driven quadruped robot can easily realize the walking gait and trot gait. Due to its small size and large motor output torque, it also exhibits outstanding performance in jumping. Mini cheetah has realized the back somersault and other moves 76 (Figure 8(a)). Taking advantage from its leg structure and motor selection, the jumping height of the whole machine can reach 48 cm (Figure 8(b)).
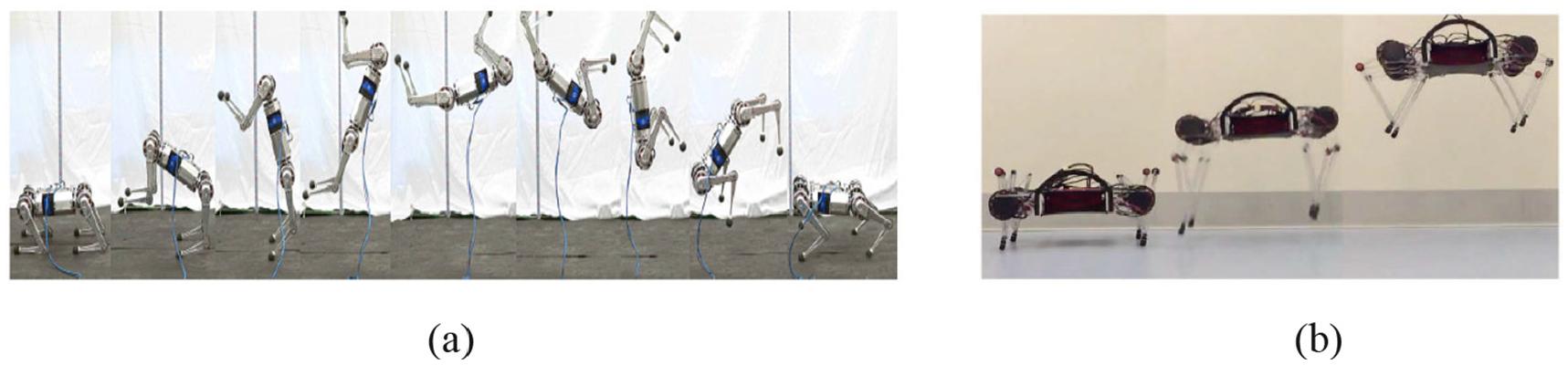
Jumping performance of Quadruped Robot: (a) mini cheetah back somersault and (b) 48 cm vertical jump of the Minitaur robot.
Comparison and analysis of quadruped robot structure
The leg joint layout of a quadruped robot determines its kinematics and dynamics performance. In the case of the quadruped robot with a single leg and three degrees of freedom, the joint forms of single-leg are knee joint and elbow joint. When these two joints are combined, there are four joint configurations: full elbow (Figure 9(a)), full knee (Figure 9(b)), front knee and back elbow (Figure 9(c)), front elbow and back knee (Figure 9(d)). The quadruped robot has a variety of structural schemes and driving modes, leading the research and development of the quadruped robot to many different combinations paths. At present, BigDog, HYQ, JINPOONG, and SCalf all adopt the front elbow and back knee type in the hydraulic driven quadruped robots, while StarlETH, ANYmal, MUTANT, Hubodog, and other motor-driven quadruped robots adopt the same structure. At this stage, MIT Cheetah 3 and some desktop quadruped robots, with the most outstanding motion capability, adopt the design of combining motor drive with the all-knee structure configuration. In the walking phase of a quadruped robot motion, the fore-elbow and rear-knee are the most stable structural models, 77 while the motion characteristics of the all-knee structure appear superior to those of other mechanisms. Combining driving mode with structural advantages is one of the key points in the research and development of quadruped robots.

Joint-configuration styles of the quadruped robot: (a) all-elbow configuration, (b) all-knee configuration, (c) outward-pointing configuration, and (d) inward-pointing configuration.
Comparison and analysis of driving mode research hotspots
The driving modes of quadruped robots are complex. At present, the research activity on different driving modes of quadruped robots, in various research institutes around the world, can be reflected upon the volume of publications. This paper lists comparative graphs of the volume of papers published on each drive mode, in the last 10 years (Figure 10).

Comparison of the number of papers published on various driving modes.
Publications volume related to each driving mode continues to increase, indicating that research on quadruped robots has gradually become one of the hot topics in robot sector research. Among the five driving modes, hydraulic drive and series elastic drive have always been the focus of research in the field of four-legged robot drive, while the related literature has been in the leading position for many years. The research attention on motor integrated gear reducer drive mode and motor direct drive mode increases every year and is close to the aforementioned two modes. Compared to the previously mentioned driving methods, the research on steering gear drive is more difficult, because these quadruped robots are more suitable for entertainment, teaching, and research, so they cannot display their characteristics in conditions of an actual working environment.
Different driving modes attract different degrees of interest, which marks the general direction of research in the whole field of quadruped robot driving. Based on the established research landscape, the hydraulic drive is the main trend, while a variety of motor drive modes continue to generate innovation, providing evidence of research direction regarding the unexplored quadruped robot issues.
Difficulties in driving mode research of quadruped robot
Drive structure design based on bionics
The animal skeletal-muscular system is the material basis for controlling body movement and posture, including skeleton, tendon, and joint. The body structure of quadruped mammals is the best reference for the design of biomimetic quadruped robots. In the design phase of driving modes, the total knowledge of biomimetics should be combined, so that the entire drive conforms to the characteristics of biological motion. Moreover, a strong power source with good output characteristics and good leg impact resistance should also be included, which poses new challenges and research directions for the design of the drive structure of the quadruped robot.
Series elastic drives are designed based on biomimetic concepts and are initially used only as control torque elements while protecting the transmission from collision. However, their use can be extended to other structural dynamic elements, similar to the muscles and tendons of animal feet, equipped with elastic energy storage, in nature. Considering this element in the design of quadruped robots, their performance, in terms of efficiency, is significantly improved. 78
Optimizing the drive mode
At this stage, the driving mode of each quadruped robot has advantages as well as many disadvantages. Taking the hydraulic system as an example, its advantages include a higher power quality ratio, making the robot more compact with a larger load capacity; a faster dynamic response, making the robot more powerful and stable; a better load stiffness, which reduces the interference of various effective loads or other external forces. 23 But the drawback is that the hydraulic system is very heavy, so the quadruped robot is very difficult to debug. Furthermore, most of the standard commercially available hydraulic components are used in heavy industry, so there is no hydraulic system driven by small-sized quadruped robots. The hydraulic system often produces noise and pollution, making indoor testing difficult. At the same time, the existing legged hydraulic robots generally lack versatility. Similarly, although motor-driven quadruped robots have excellent motion characteristics and can achieve multiple motion gaits, they also have shortcomings in load capacity and endurance. Therefore, standing on the shoulders of predecessors, to optimize the driving mode of quadruped robots, is one of the fastest and most effective ways to improve the performance of quadruped robots, at this stage.
Better motion control and gait planning
The most intuitive way to evaluate the advantages and disadvantages of a quadruped robot is to observe its actual motion performance. Good motion control and gait planning is the most basic method, to improve the motion performance of the robot. Within the framework of an appropriate motion control loop, the environmental feedback is connected to the upper control of the body, while the driving unit is adjusted accordingly, to realize the quadruped robot adaptation to different environments. The quadruped robot exhibits different advantages in terms of speed, energy consumption, and stability, depending on the gait, so it is required that the quadruped robot can select the gait, which is appropriate for each environment, to achieve the best motion effect.
Cost control of drive system
The drive system accounts for a large proportion of the research and development cost in the quadruped robot field. Control of the cost while meeting the design requirements has an important impact on whether the quadruped robot can be developed in large quantities and become a commercial product. Therefore, the cost of the drive system should be a consideration of the quadruped robot development planning. Currently, some motor-driven quadruped robots perform well in this regard, as Doggo and mini Cheetah have hardware costs of just a few thousand dollars. In contrast, due to the complexity of its drive system, the cost of a hydraulic-driven quadruped robot is much higher than that of a motor-driven one, posing another difficulty that researchers need to face in the future.
Development trend of future quadruped robots
The essence of a quadruped robot is a robot designed and developed by humans, according to the animal movement of quadruped mammals. Robot technology has made great progress, after years of development. Considering the continuous improvement of robot vision, computer technology, automation, and sensor technology, people are no longer satisfied with heavy and rigid quadruped robotic constructions. On the contrary, there are new high requirements and expectations for the future development of robots.
Bionics: Bionic structure and control strategy
After thousands of years of evolution, quadruped mammal animal bodies have already adapted to various natural conditions. In the future, the development of the quadruped robot will be more combined with bionics, observing the bone structure of quadruped mammals, to improve the joint configuration of its machine structure. Besides, the efficient movement of the animal is also related to its control mechanism. Although researchers have not fully comprehended and utilized the mechanism of quadruped animals, the research on quadruped robots has deepened in recent years, while the CPG-based biomimetic control method has been put forward and improved continuously. In the future, quadruped robot research, based on animal morphological structure and control theory, will become an important trend.
Intelligence: Autonomous learning, adaptive control
At present, most quadruped robots can achieve the goal of researchers to a satisfactory degree, but the adaptive control and autonomous learning of unknown environments and unknown tasks are not yet fully attained. Nonetheless, in the future, the development of the control chip and the advanced sensor technology will make quadruped robots more aware of the environment. Furthermore, machine learning and AI algorithms will enable quadruped robots to imitate human or animal thinking, making corresponding logical decisions. The future quadruped robot, with independent learning and adaptive ability, represents the general trend of development, leading to broad application prospects, in the future.
Energy-saving: High efficiency and low consumption
The performance index of the quadruped robots includes motion flexibility, dynamic performance, and payload capability. The development trend of quadruped robots focuses on its driving being able to provide more efficient output, to adapt to different environmental disturbances and varying terrain effects. The future quadruped robot will be able to carry equipment, as a mobile platform, exhibiting highly prominent load capacity and endurance. Also, improvement of the energy utilization and endurance time of quadruped robots can seriously promote their development.
Human-machine interaction: Fast and reliable
The ultimate goal of quadruped robots is to replace humans in difficult or dangerous tasks. This requires simple and quick interaction between humans and machines. The future of the quadruped robot will include many kinds of human-machine interface, while some convenient interactive instructions, such as gesture and voice, may become a bridge between human beings and quadruped robots. This simple way of interaction can significantly expand the application of quadruped robots and enable people of the general population to become manipulators of such machines, so that they can fully be integrated into all activities of life, serving mankind.
Summary
In this paper, the driving mode of the quadruped robot is distinguished into four categories: hydraulic drive, motor integrated flexible structure drive, motor integrated gear reducer drive, and steering gear drive. A large number of representative quadruped robots are listed, to each driving mode, while the current research and development achievements are comprehensively summarized. In the form of a table and histogram, the load capacity and motion characteristics of representative quadruped robots with different driving modes are compared, while their advantages and disadvantages are analyzed. Next, the motion mode and driving scheme design of quadruped robots are compared. Furthermore, the number of papers published on the driving mode of a quadruped robot, in recent years, is summarized, deriving certain conclusions and predictions about the research hotspot of quadruped robot driving. Also, this paper analyzes the current difficulties in the research of the quadruped robot, aiming to provide direction to future research in this field.
It is evident that, quadruped robots, with the advantages of various driving modes and the aid from continuous research and development interest, will receive a wide range of demands for service in detection, exploration, transportation and logistics.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to thank the financial support from the National Natural Science Foundation of China (Grant No. 61801122), the Natural Science Foundation of Fujian Province(Grant No. 2018J01762), and the Science Project of Fujian Education Department(Grant No. JK2017002).