
Abstract
At present, designing and planning of robots are mainly based on path planning. This mode cannot meet requirements of real-time and precise planning for robots, especially under complex working conditions. Therefore, a parallel collaborative planning strategy is proposed in this paper, which parallel collaborates optimal task allocation planning and optimal local path planning. That is, according to real-time dynamic working environment of robots, the dynamic optimal task allocation planning strategy for coupled system of robot in low coupling state is adopted, to improve real-time working efficiency of underground heavy-load robot. Meanwhile, the parallel elite particle swarm optimization algorithm is adopted to improve accuracy of path tracking and controlling. Finally, the two planning strategies are collaborated parallel to realize intelligent and efficient planning of whole complex coupled system for underground heavy-load robot. The simulation and experiment results show that the parallel collaborative planning algorithm proposed in this paper has perfect controlling effects: Total flow of overall system is saved by 11.03 L, execution time saved by 16.8 s and implementation efficiency has been improved by 10 times. Therefore, the parallel collaborative planning strategy proposed in this paper can not only meet requirements of high efficiency and precision of intelligent robot under complex working conditions, but also greatly improve real-time working effectiveness and robustness of robots, so as to provide a reference for dynamic planning of complex intelligent engineering machinery, and also supply design basis for development of multi-robot collaborative system.
Keywords
Introduction
China is the largest coal producer and consumer in the world. According to the statistics of Ministry of Energy in 2018, the output of raw coal in China reached 3.55 billion tons, and more than 90% of them still rely on underground mining. 1 At present with the rapid growth of global economy, deep, long-distance, and large-span underground roadway mining has become a common challenge for the coal mining industry all over the world. 2 It also turns into a technical leapfrogging for the efficient and safe mining of China, which puts forward higher requirements for the development of coal industry. Furthermore, 38 kinds of five categories underground coal mine robots to be developed were clearly listed in the announcement from the National Coal Mine Safety Administration (No. 1 in 2019), which aims to realize gradually the “mechanized, intelligent, and unmanned” coal mine, and comprehensively promote the high quality and safe development of coal industry in China. 3 However, the narrow, low, low illumination, wet underground working conditions with high risks, such as floor subsidence, collapse of sidewall and serious heat damage, etc. bring challenges and difficulties for the development of intelligent underground coal mine robots.
Planning research, as an important controlling technology of robot, is an effective way to realize the autonomy and intelligence of robots, which has made breakthrough progress. Hassan et al. 4 proposed a hybrid planning structure, which adjusted the planning behavior of robots, selected a reasonable planning mode according to various environment, and effectively solved the contradiction between time requirement and low efficient planning. Zhou 5 took the underground rescue robot as research object, made research on the technologies of moving path planning and trajectory tracking in autonomous navigation. In view of the fact that the global optimal path of the search and rescue robots in coal mine is very difficult to obtain due to the interference of obstacle regions in local path planning process, Jin 6 proposed an optimal path planning algorithm based on coordinate rotation. Li and Yu 7 adopted ant colony algorithm to solve the path planning problem of exploration and rescuing in a three-dimensional environment. Nevertheless, all these intelligent algorithms are only limited to the research of path planning, which is not enough for the requirements of complex working conditions underground. Accordingly, to achieve a comprehensive and effective planning of underground robots, the task allocation planning of the robots should not be ignored. 8 At the same time, the research on cooperation of multi-robots becomes the hotspot of all kinds of robots, and the premise of realizing efficient cooperation of multi-robots is the efficient collaborative implementation of each robot itself.9,10 However, up to now, there are a little relevant research on the cooperation of single robot, which greatly limits the adaptability of intelligent robots to complex working environment and precise planning performance. 11
In view of the complex and high-risk working environment of tunnels, newly developed underground heavy-load robot should have stronger adaptability, robustness, and cooperation ability. Therefore, based on the above researches and complex coupled system of the underground heavy-load robot itself, this paper proposes a double-layer dynamic parallel collaborative planning strategy. The first planning layer is the optimal task allocation planning. Through collaborating the dynamic spatial environment, it forms an efficient controlling, decision-making and task allocation scheme by scientific and reasonable task allocation planning; The other layer is collaborative path planning adopting Parallel Elite Particle Swarm Optimization (PEPSO) path planning algorithm, which can achieve the efficient cooperation between execution planning and path planning. Consequently, a design of high efficiency cooperative system could be realized in low coupling state for complex MDO system of underground heavy-load robot. The parallel collaborate planning strategy presented in this paper meets both the requirements of optimal design of overall structure and high-precision controlling of robots. The double layer dynamic parallel collaborate planning strategy proposed in this paper can provide a basis for realization of precise intelligent navigation system of underground mining robots in complex tunnel environment. Furthermore, the work in this paper also has application and value in practice for the implementation of efficient collaborative planning in the same kind of complex intelligent machinery products, as well as the new collaborative industrial robots and cooperative system of multi-robots.
MDO coupled system of the underground heavy-load robot
Topological structure of the underground heavy-load robot
To satisfy the requirements of heavy-load operations and high explosion proof in complex tunnel environment, the newly developed underground heavy-load robot can bear the effective load of more than 2 kn, the maximum operation radius of 2797 mm and the repeatability of ±2.0 mm. The multi-arm structure and various actuators make it flexible to complete many heavy-load operations and repair operations in the narrow space of tunnels and chambers, such as non-fixed-point transportation, supporting, lifting, and so on. It can be even used in the emergency rescue of roadway. Hence the underground heavy-load robot will play a positive role in raising the mechanization level of heavy-load conditions in narrow tunnels, promoting the control technology of tunnels, and ensuring the safety and efficient production of coal mines/ highways. The topological structure of the underground heavy-load robot is shown in Figure 1.

Topological structure of underground heavy-load robot.
In Figure 1, P0 is the sliding pair of crawler traveling mechanism; P1 is the sliding pair of lifting turntable; P4 is the sliding pair of the hydraulic cylinder on big arm; P5 is the sliding pair of the hydraulic cylinder on small arm; P6 is the sliding pair of the hydraulic cylinder from actuator end; R2 is the swinging(turning) pair of the turntable; R3 is the rotating pair of the turntable; R4i are the rotating pairs of big arm; R5i are the rotating pairs of small arm; R6i are the rotating pairs of executive end.
As shown in Figure 1, the underground heavy-load robot is a typical spatial multi-DOF (degree of freedom) robot, which adopts three-level series structure: The first level is a walking mechanism composed of a crawler, a fuselage and chain wheels, which can perform movement of the robot at a speed of 27 m/min at the bottom of uneven, soft, and muddy tunnels. The second level is a lifting and rotating mechanism, which can drive an executive arm moving up and down along vertical direction of tunnel bottom by 230 mm, sway along central axis of the turntable by ±40° and rotate along the center of the executive arm by 360°. The third level is composed of three executive arms (big arm, small arm, and executive end) and the quick-change device. The three executive arms which are connected by rotary joints can assist the output actuator to complete various high-load operations. The quick-change device is used to replace different output actuators (crushing hammer, milling head, hydraulic shear, etc.) to meet the requirements of different heavy-load operations under complex tunnel conditions, which is another characteristic of the underground heavy-load robot. It can achieve one robot with multi functions.
Correspondingly, the structural characteristics sets of the three-level structure can be expressed as Msh1, Msh2, and Msh3 respectively. According to the topological structure synthesis of serial mechanisms, 12 the topological characteristics set ΣMsh of the underground heavy-load robot is:

In equation (1):

Where:
The third level executive arms of the underground heavy-load robot is composed of three hydraulic loops in series: POC4, POC5, and POC6 (


Wherein:
According to topological synthesis, the characteristics set of executive arm mechanism is:

Taking equations (2) and (3) into equation (1), the total topological structure of the underground heavy-load robot can be expressed:

So the number of independent motion of the underground heavy-load robot is:
MDO coupled system of the underground heavy-load robot
To achieve the requirements of complex environmental conditions and non-fixed-point heavy-load operation mode, the heavy-load robot is driven by explosion-proof diesel engine and all the actuators are powered by hydraulic systems, which can make the whole system integrate many disciplines, including: mechanism, mechanical kinematics, mechanical dynamics, hydraulic control technology, electrical, and intelligent control technology, etc. Accordingly, the optimal design for robot system belongs to typical complex multidisciplinary system design optimization. 14 That is to say, during the design process of underground heavy-load robot, it is necessary to integrate the resources of various disciplines reasonably and deal with the impact of strong coupling relationship among disciplines effectively. Meanwhile, complex environment, implementation, and control effects must be synchronously considered to obtain the optimal planning effect of the whole system. 15 The collaborative planning of MDO coupled system for the underground heavy-load robot is shown in Figure 2.

Collaborative planning of coupled system for underground heavy-load robot.
Dynamic environment of underground heavy-load robot
The closed, narrow, low, and high risk working conditions (such as tunnel floor heave and side wall collapse, heat damage, etc.) bring difficulties to the planning and research of MDO system for underground heavy-load robot. Therefore, this paper introduces a dynamic underground environment system {E} to accurately descript the complex system environment, which includes underground spatial environment {ET} and dynamic state {ER} of the robots. The established environment system model is much closer to real environment, and the subsequent planning will be more reliable, which will be helpful to achieve the real-time dynamic collaborative planning of the whole system for underground heavy-load robot. The dynamic spatial environment system is expressed:

(1) Spatial environment {ET}
The spatial environment {ET} considers the tunnel environment {ETunnel}, local working environment {EWork} and obstacle environment {EObstacle} where the underground heavy-load robot work.

In equation (5): {ETunnel} is the overall environment underground. The environment underground determines the state of heavy-load robots, including the basic geometric parameters of tunnel such like section shape (arch, rectangle, trapezoid), length, direction, etc., and layout of various equipment in the tunnel.
{Ework} is the local spatial environment to implement heavy-load operations, which is also the guarantee for robots to carry out various heavy-load work safely (it can be approximated to the maximum joint trajectory space of underground heavy-load robot. 16 ).
{Eobstacle} is the obstacle state during the process of operations, including all kinds of static or dynamic obstacles.
(2) The state of robots {ER}
The planning process of robots is an iterative process based on spatial dynamic environment and actual state of robots, which means the accuracy of planning is also closely related to the state {ER} of robots themselves. The state {ER} can reflect whether the robots deviates from the ideal planning state (such like: posture deviation, motion deviation, vibration, etc.).
The spatial dynamic environment model of the underground heavy-load robot is shown in Figure 3 (The following dynamic parallel collaborative planning studies are all carried out based on this environmental model).

Dynamic spatial environment of underground heavy-load robot.
Parallel collaborative planning of MDO system for underground heavy-load robot
As a critical factor to realize the dynamic collaborative planning of coupled system for underground heavy-load robot, how to collaborate the strong coupling relationship between each subsystem reasonably is the key point. Hence a double-layer dynamic parallel collaborate planning algorithm (parallel collaborative task allocation planning and path planning) under low coupling state is proposed to realize the dynamic precise planning for heavy-load robots in this paper.
Optimal task allocation planning strategy based on task decomposition
Task allocation planning can decompose the complex tasks gradually and then allocate subtasks to each actuator. It is the foremost strategy that needs to be considered, which will directly affect the accuracy and efficiency of robots. However, the scientific and efficient task planning is not only a simple task allocation, but needs to consider the dynamic environment and actual executive state of robots.
The model of optimal task allocation planning
The implementation of heavy-load operations from the underground heavy-load robot is mainly based on the movement of executive arms mechanism, supplemented by the actions of first level walking mechanism and the actions of third level turntable mechanism. According to the above topological synthesis, an optimal model for task allocation planning of the underground heavy-load robot can be established:

In equation (6), D is the overall task planning scheme of the robot; D1 is the task planning of walking mechanism; D2 is the task planning of turntable mechanism, and D3 is the task planning of executive arms mechanism.
Through scientific and reasonable collaboration for task allocation planning D, the MDO system of the heavy-load robot could achieve the following targets.
1. The whole system has the highest executive efficiency (the shortest executive time).

Where: Σt is the total executive time of whole system. ∑t1 is the working time of walking mechanism. Σt2 is the operating time of turntable mechanism. Σt3 is the operating time of executive arms mechanism.
2. Minimum energy consumption of the MDO system (minimum hydraulic oil consumption):

Where: ΣQ is the total hydraulic flow of whole system (L). ΣQi are the total flow of walking mechanism, the total flow of turntable mechanism and the total flow of executive arms mechanism, (ΣQi = Σ(qiti), qi is the unit flow of each mechanism, i = 1, 2, 3)
For all actuators efficient completion of the planned tasks is the basis to ensure optimal task allocation of the underground heavy-load robot. In addition to consideration of the mechanical structural constraints of the robot, the constraints of driving/controlling system and spatial working environment constraints should also be considered simultaneously:
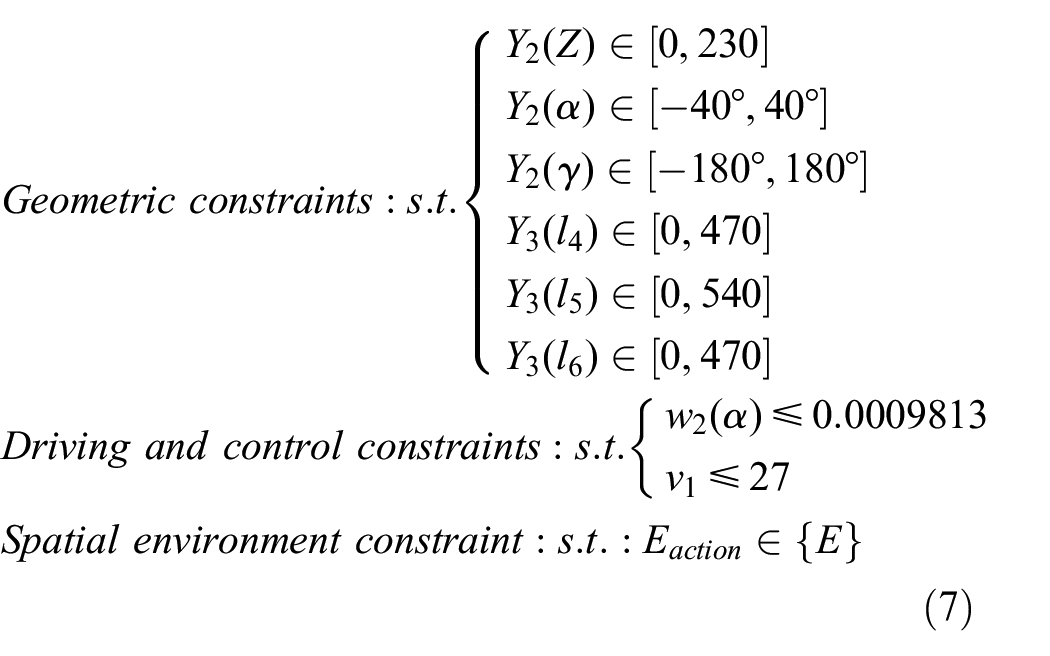
In the constraint model (7): Y2(Z) is the displacement in Z-direction of turntable mechanism(mm); Y2 (α) is the swinging displacement of turntable mechanism(mm); Y2 (γ) is the rotation displacement of turntable mechanism(mm); Y3(l4) is the displacement of big arm hydraulic loop(mm); Y3(l5) is the displacement of small arm hydraulic loop(mm); Y3 (l6) is the displacement of executive end hydraulic loop(mm); w2(α) is the swinging speed of turntable mechanism(rad/s). Eaction is the actual working space of the underground heavy-load robot. v1 is the moving speed of walking mechanism(m/s).
Optimal task allocation planning strategy
Based on the above analysis, we can conclude that the mechanical body of the underground heavy-load robot is a complex multi-DOF machine which is composed of three actuators. The task allocation planning needs to coordinate the actions of each actuator accordingly. Under the premise of minimum cost schemes and that all the constraints are satisfied, based on task decomposition, this paper proposes an optimal task allocation planning strategy by coordinating parallelly the complex MDO system and dynamic environment, and plans the optimal task allocation for the robot.
Through coordinating the three levels of parallel mechanisms, the underground heavy-load robot can realize the complex spatial output motions. Hence the optimal task allocation can be transformed into optimal combination planning problem of task allocation for three levels of actuators:

Where,
The typical task planning of underground heavy-load robot are listed in Table 1.
Task allocation for underground heavy-load robot.

The specific flow chart of optimal task allocation planning strategy is shown in Figure 4.

Flow chart of optimal task allocation planning.
As shown in Figure 4, the process of optimal task allocation planning is: After the heavy-load robot arriving at the designated operation site, the robot analyzes the assigned heavy-load tasks firstly. Secondly, to reduce the strong coupling relationship of subsystems in MDO system, the tasks are decomposed. Thirdly, under the condition that all the constraints are satisfied, the dynamic spatial environment and changes of operation are also coordinately considered, and the executive tasks of each actuator mechanism (D1, D2, and D3) are reasonably distributed according to equation (8). Finally, until the expected targets (
Verification of optimal task allocation planning
Now, the implementation effect of the optimal task allocation planning is tested by recondition work of a tunnel (55 m × 2.4 m × 0.3 m). Firstly, analyze the operation: the whole operation process includes cleaning, excavating, transferring and other non-fixed-point operations. Secondly, the total task can be decomposed according to equation (8). Task D1: Coordinating actuator arms and lifting turntable to complete the fixed-point operation such as drawing, digging (D1 = λ2D2+λ3D3); Task D2: Transferring to the conveyor equipment(D2 = λ1D1); Task D3: Coordinating actuator arms and lifting turntable to finish the unloading operation (D3 = λ2D2+λ3D3); Task D4: Returning to the next operation position and preparing for next scheduled task (D4 = λ1D1+λ2D2+λ3D3). Finally, solving the optimal task allocation planning scheme and outputting the optimal planning results: optimal ∑D (opt: ∑D = ∑D1 + ∑D2 + ∑D3+∑D4). By comparing the traditional linked task controlling algorithm and ant colony planning algorithm 18 with the collaborative task allocation planning algorithm proposed in this paper, the experimental results are listed in Figure 5:

Comparison results of task allocation.
As shown in Figure 5, comparing with the traditional linked controlling algorithm, the optimal task allocation planning algorithm saves the total executive time by 16.62 s and saves the total hydraulic flow by 11.03 L. Comparing with the ant colony planning algorithm, the optimal task allocation planning algorithm saves the total executive time by 4.82 s and saves the total hydraulic flow by 3.17 L. Obviously, the collaborative optimal task planning algorithm can not only obtain a better task allocation scheme in a shorter planning time, and also can shorten the executive time of each actuator and reduce the controlling flow effectively, finally achieve the improvement of efficiency for overall MDO coupled system.
Optimal path planning strategy based on PEPSO
Path planning is another important task planning besides task allocation planning, which is mainly applied to implement non-fixed-point heavy-load operations, and it is also the basis of navigation and real-time controlling for robots. At present, the path planning mainly includes global path planning based on map and local path planning based on sensors. 19 Due to the unknown and high-risk environment of tunnel, the accurate global environment information of the whole tunnel is very difficult to obtain. The path planning of robots mainly depends on the feedback information of sensors/monitoring system. Therefore, the path planning for underground heavy-load robot is essentially a local path planning, which should consider the spatial dynamic environment and plan an optimal safe moving path from starting position to the target .
Optimal local path planning model
The optimal path planning not only requires the shortest path planning, but also needs to ensure the flexibility, safety and stability of planning path for robots, especially when a robot performs non-fixed-point heavy-load operation. Moreover, it is also necessary to minimize various errors in path tracking process and avoid frequent turning paths of robots. 20 For these reasons, the evaluation function of planning path Fsmooth is introduced, the smaller the value is, the smoother planning paths are, and the better stability and higher reliability heavy-load robots acquire. The optimal local planning path model of underground heavy-load robot is:


Geometric constraint: s.t: v1 ≤ 27 m/s
Spatial environment constraint: s.t: ∑Path∈{E}
In the optimal local planning path model (9): ∑Path is the total displacement of optimal planning moving path. ΣPathx is the total displacement in X-direction of local optimal planning path (mm), and ΣPathy is the total displacement in Y-direction (mm). w1, w2, and w3 are the weight coefficients for each factor (w1+w2+w3 = 1). Li, Ai and Sd are the lengths of moving path, the turning path, and critical safety distance to avoid obstacles respectively (mm).
1. Length of moving path Li
If Pi (xi, yi) is the location node from current planning path and Pi+1 (xi+1ÿҰyi+1) is the next location node, the length of moving path Li is:

Wherein: n is the total number of planning paths (i = 0, 1, 2, 3, 4…n);
2. Local turning path Ai
Ai represents the smoothness of local turning path:

Where ∑Ai is the total length of turning paths (mm), m is the total number of turning paths; R is the radius of turning paths (mm); α is the degree of turning paths (45°, 90°, 135° in grid environment).
3. Safe distance Sd
When a robot encounters obstacles, local planning path is converted into planning the appropriate Sd (safe distance). According to the fed back information from monitoring and sensing system, Sd is planned under the premise that the robot can get through obstacles with no collision. The appropriate Sd can directly ensure accuracy and safety of the robot.

Where: Sr is the actual relative distance between the robot and obstacles (mm);
S
S is the critical safe distance (mm), which is the minimum safe distance that must be kept between the robot and obstacles:
21
(Where: vR is the moving speed of the robot (m/s); vf is the moving speed of obstacle (m/s). B is the effective width of the robot to avoid obstacles).
The path planning strategy of obstacle avoidance for the underground heavy-load robot is as follow:
When: Sr ≥ Ss, the heavy-load robot keeps the current planned trajectory and velocity, Sd = 0;
When: Sr < Ss:
If vR > vf, the heavy-load robot applies emergency braking immediately and plans obstacle avoidance path simultaneously (passing the obstacles from left or right side), Sd = Ss;
If vR < vf, the heavy-load robot slows down and plans obstacle avoidance path simultaneously (passing the obstacles from left or right side), Sd = Ss;
If vf = 0, the heavy-load robot slows down then plans the obstacle avoidance path (The artificial potential field algorithm and the walking along the wall algorithm can be used to plan the path).
The strategy of PEPSO local optimal path planning
Up to now, the common local path planning algorithms of moving robots include: Dijkstra algorithm, A* algorithm, artificial potential field algorithm, grid algorithm, ant colony algorithm and genetic algorithm, etc. With the advantages of fast searching speed, high accuracy and good robustness, PSO (particle swarm optimization) has become an efficient path planning algorithm for moving robots, which can obtain good results especially in multi-dimensional continuous spatial path optimization. But due to the low convergence accuracy, the particles are easy to fall into local optimization and search stagnation, which makes the PSO algorithm difficult to find the true global optimal solution in practice. 22 Hence, in order to adapt the complex working conditions of tunnels, this paper proposes PEPSO (Parallel Elite Particle Swarm Optimization) strategy to improve the efficiency and accuracy of real-time dynamic path planning for underground heavy-load robot.
1. Selection and update of elite particle swarm
The random particle swarm has been initialized in the feasible region, and “elite” particles (the particles who have the highest fitness value) have been selected to form the elite assemble, which can guide other particles effectively. Then, the elite particles assemble makes up temporary mixed population by genetic manipulation. Finally, according to the fitness value (F(x)) of temporary mixed population, the individual optimal elite particle is chosen as the next generation for searching. 23 Since the particle population is preserved from the original population, even when what the genetic operation produces are inferior individual particles, the overall fitness value would not be reduced, which can effectively avoid the disadvantage of falling into local optimization.
The speed and position of elite particle swarm can be updated according to equation (13):

Where:
2. Parallel searching strategy
Generally, the direction of path planning begins from starting point, and adjusts the feasible node Pi to move toward target point gradually. To increase neighborhood of path planning points and strengthen the sense of searching direction, this paper proposes a parallel path searching strategy for planning path. That is, both the starting point and target point begin to search simultaneously, and the schematic diagram of parallel search strategy is shown in Figure 6.
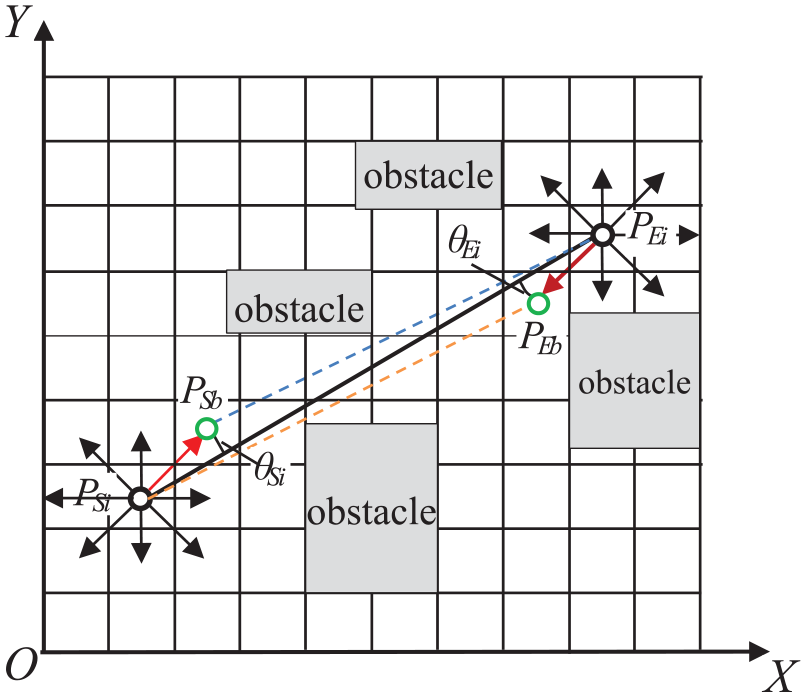
Parallel search diagram.
Assuming PSi (xSyS) is the starting point of path planning, PSb is the feasible searching elite particle swarm node of starting point, then the searching direction vector θSi of the starting point is:

Assuming PEi (xEyE) is the target point, PEb is the feasible searching elite particle swarm node of the target point, then the searching direction vector θEi of the target point is:

Then the smaller between θSi and θEi is chosen as direction vector of next feasible elite particle swarm node θbest (i+1).
According to the minimum target evaluation value F(X) min of equation (9) and feasible direction vector θbest (i+1), we can choose the optimal elite particle swarm {Pbesti} from start searching elite particle swarm {PSbesti} and target searching elite particle swarm {PEbesti}. The parallel search strategy can effectively improve search efficiency of path planning.
3. Implementation of PEPSO strategy
The combination of above two strategies is the PEPSO path planning strategy proposed in this paper, the specific implementation steps of PEPSO are listed as follow:
Step 1: Initialize particle swarm P, planning scale N, cyclic variable i = 0 and maximum number of iterations T.
Step 2: Initialize the speed and position of random particle PS0 of starting point and target point PE0 simultaneously, to get the feasible random particles PSi and PEi, then take genetic crossover operation to them respectively. Finally, according to the goal and search direction vector of path planning, the elite swarm set {PSbest} of starting point PS and elite swarm set {PEbest} of target point PE can be obtained.
Step 3: Arrange {PSbest}, {PEbest} and temporary mixed species groups in descending order according to the planning target, and retain the individuals of optimal species group to form a new species group {Pbesti};
Step 4: Update the velocity and position of particles of new species group {Pbesti} according to equation (13);
Step 5: On the premise of meeting the requirements of optimal path planning, the next species g roup {Pbest (i+1)} is selected to generate the next generation nodes PS(i+1) and PE(i +1) according to the optimal direction vector θbest (i);
Step 6: Iteratively increase t = t+1, until t > T, otherwise turn to Step 2, and finally output the optimal planning path node {Pbesti}.
Simulation of PEPSO path planning
Matlab 2016b is applied to simulate the actual spatial environment with dynamic and static obstacles, the simulation results of PEPSO path planning are shown in Figure 7.

PEPSO optimal local path planning.
The simulation results show that: in complex environment, the PEPSO optimal path planning strategy not only keeps high convergence, but also reduces the probability of falling into local optimization effectively, which makes the underground heavy-load robot more adaptive to complex dynamic environment. The comparisons among traditional PSO path planning algorithm, EPSO path planning algorithm, A* path planning algorithm and PEPSO path planning algorithm are shown in Figure 8.

Comparison of PEPSO and EPSO/PSO/A*: (a) comparison of PEPSO and EPSO/PSO/A* and (b) comparison of PEPSO and EPSO/PSO/A* (local graph).
In Figure 8, the implementation of PEPSO path planning algorithm, EPSO path planning algorithm, standard PSO path planning algorithm, and A* path planning algorithms are compared, and the results are showed in Table 2.
Comparison results of path planning.

A* is a typical path planning strategy.
From the results in Table 2, comparing with the standard EPSO path planning algorithm, PSO path planning algorithm and A* path planning algorithm, the total length ∑Path of PEPSO path planning strategy is the shortest among four path planning algorithms, which indicates that PEPSO path planning algorithm can improve the searching efficiency greatly. In addition, the smoothness Fsmoth of PEPSO is also better than that of PSO, EPSO, and A* path planning algorithm, especially at the turning paths. Therefore, it is evident that the PEPSO path planning strategy proposed in this paper has better efficiency and accuracy than other path planning algorithms.
Parallel cooperative planning of MDO system for underground heavy-load robot
To sum up, the planning research on the complex MDO system of underground heavy-load robot belongs to a typical optimal planning problem of complex system. 24 To achieve the optimal planning and design of the whole MDO system, this paper proposes a double-layer parallel collaborative planning strategy based on optimal task allocation and PEPSO path planning. That is, under the low coupling state of robot system, the optimal collaborative task planning and local optimal path planning of the system are carried out simultaneously. The principle of parallel collaborative planning strategy is shown in Figure 9.

Parallel collaborative planning of MDO system for underground heavy-load robot.
In the parallel collaborative planning model: ΣF(z) is the total optimal planning objective function of the whole coupled system for the underground heavy-load robot. F (Zi) is the optimal planning function. X* is the optimal design vector of the global coupled system. J(x) is the constraint to coordinate consistency of subsystems, so as to ensure the consistency of design variables and coupling state variables between subsystems of the whole coupled system.
The specific effect on implementation of the parallel cooperative planning strategy can be verified by the following experiments and simulation.
Experiments and simulation
At present, the newly developed underground heavy-load robot has been successfully applied to Jizhong Energy Group, Zhongmei Zhongtian hechuang Company, Zhongmei Xinji Company, Huaibei Mining Group, Huainan Mining Group, Shenhua Xinjiang Energy Company, Guizhou Liupanshui mining group, Pingmei Group and other mining enterprises. Figure 10 shows the actual working situation of the underground heavy-load robot.

Application of underground heavy-load robot.
According to actual application of the robot, the results on statistics of manual controlling mode, remote controlling mode, and parallel cooperative controlling mode are shown in Table 3:
Actual working statistics results.

As the comparison results shown in Table 3, the efficiency of underground heavy-load robot with parallel collaborative planning mode is 11 times that of manual linkage controlling mode per shift, and 1.375 times that of remote controlling mode. The statistics results prove that the parallel collaborative planning mode presented in this paper can significantly reduce man-machine and improve the safety and efficiency of operation.
Conclusion
To realize the efficient implementation and control of complex MDO system, this paper proposes an optimal task allocation planning strategy based on the decomposition of tasks. According to the mechanical topological structure system, the implement effect and control effect are collaboratively considered. After decoupling the coupled system by decomposing the task, implement the optimal task allocation planning of each system collaboratively.
In view of complex environment of tunnels, a PEPSO (parallel elite particle swarm optimization) local path planning algorithm is proposed, which can coordinately consider the tunnels environment and state of a robot itself. Finally the planning and implementation efficiency of overall coupled system are improved for underground heavy-load robot.
In order to cooperate among the environment, mechanical body, implementation effects and controlling effect, this paper proposes a parallel dynamic cooperative strategy for underground heavy-load robot. It can reduce the influence of coupling among complex subsystems, and achieve the efficient integration of the whole system.
In light of the severe working condition of tunnels and complex MDO system of underground heavy-load robot, this paper proposes a new parallel collaborative planning strategy, which simultaneously collaborates the optimal task allocation planning and PEPSO local path planning. The parallel collaborative planning strategy can effectively improve the efficiency and accuracy of MDO coupled system for underground heavy-load robot. At the same time, the work of this paper can provide ideas for multi-robot collaborative planning, and also supply feasible basis for the collaborative implementation of multi robot.
Footnotes
Handling Editor: James Baldwin
Author contributions
Lixia Fang conceived and designed the manuscript. Yang Shen revises all the parts proposed by reviewers. Tong Wang and Pengjiang Wang help to compile the algorithm proposed in this paper and reviewed the manuscript. Miao Wu reviewed the whole paper. All authors read and approved the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Basic Research Program of China: Principle and method of intelligent measurement and control for walking, deviation correction and cutting accuracy of cantilever roadheader in coal mine (2018101060080).
Code availability
All code generated or used during the study are available from the corresponding author by request.
Data availability
The data used to support the findings of this paper are included within the article.