
Abstract
The steering resistance torque of commercial vehicles on low adhesion pavement is greatly reduced. Therefore, while driving on low adhesion pavement, the use of traditional EPS control strategies without considering adhesion coefficient will lead to driver’s road feeling being reduced or even lost, endangering driving safety. In this paper, the relationship between adhesion coefficient and steering resistance torque is researched through theoretical analysis and simulation. Two novel EPS control strategies of commercial vehicles considering adhesion coefficient are designed. The first control strategy calculates assist coefficient through steering resistance torque under different working conditions, and assist coefficient is used to adjust the assist torque on the pavements with different adhesion coefficients. The second control strategy applies a compensation current related to adhesion coefficient on the basis of traditional EPS control strategy to improve the road feeling of low adhesion roads. Finally, a joint simulation model of TruckSim/Simulink is established, the two novel control strategies are simulated and verified. The simulation results show that both the two novel control strategies can improve the road feeling of the driver and improve the driving safety on low-adhesion road while ensuring the steering portability.
Keywords
Introduction
Compared with hydraulic power steering system, electric power steering (EPS) system has simple structure and better fuel economy. 1 In recent years, the use of EPS systems has begun to expand from the field of passenger cars to the field of commercial vehicles. 2 The assist torque of the conventional EPS system is determined only by the vehicle speed and the driver’s hand torque, the pavement adhesion coefficient is not considered. However, the adhesion coefficient has a great influence on the steering resistance torque, which is greatly reduced on low-attach roads. If the EPS system still outputs the same assist torque as on high-adhesion road, the driver’s road feeling will be reduced or even lost, which will affect driving safety.3,4 Therefore, designing EPS control strategies which consider adhesion coefficient is of great significance for improving driving safety.
To solve this problem, Masahiko et al.5,6 improved the steering performance of the vehicle on low-adhesion roads through steering angle feedback control. Zhao et al.7,8 graded the adhesion coefficient, and a control strategy of modified assist current based on road surface adhesion coefficient is designed. Fan et al.9,10 used fuzzy control to obtain the compensation assist current.
However, the above control strategies are all designed based on passenger cars. Compared with passenger cars, commercial vehicles have larger mass, heaver steering shaft load, higher center of mass. Thus the risks of sideslip and rollover are greater.11,12 Therefore, the EPS control strategy for passenger vehicles cannot be directly applied to commercial vehicles. This paper designs applicable EPS control strategies based on commercial vehicles.
In this paper, the variation of steering resistance torque of different adhesion coefficient roads is analyzed. Two novel EPS control strategies based on resistance torque and compensation current with consideration of adhesion coefficient are designed. TruckSim/Simulink co-simulation model is established. These two control strategies are evaluated by using co-simulation model. The simulation results show that both of the two control strategies can improve the road feeling and driving safety on the low-adhesion road while ensuring the steering portability.
Study on the relationship between adhesion coefficient and steering resistance torque
For vehicles with EPS systems, the steering resistance torque has the following relationship:

where Tr is the steering resistance torque, Ta is the assisting system assist torque, Td is the driver’s steering hand torque.
The steering system resistance torque is composed of moment exerted on the steering wheel by the road surface, the inertial force and the friction force of the steering system. The inertial force and the friction force of the steering system are inherent characteristics of steering system. Adhesion coefficient affects the force between the road surface and the steering wheel, which includes the road surface friction resistance torque, the tire self-aligning moment, lateral force aligning moment and gravity aligning moment. 13
In in-situ steering and low-speed steering conditions, the friction torque between tires and ground is very large, so the steering resistance torque is much higher than the steering resistance torque at high vehicle speed. Under the condition of low speed and large turning angle, the lateral acceleration of the vehicle is small, so the cornering angle of the tire is small, and the tire self-aligning moment formed by the lateral force is small. Due to the large steering wheel angle at this time, the gravitational aligning torque formed by the front axle load dominates. Since the friction force is the product of the front wheel load and the adhesion coefficient, the adhesion coefficient directly affects the friction resistance. The frictional resistance accounts for the largest proportion of the steering resistance during in-situ steering and low-speed steering. So the adhesion coefficient has great influence on the steering resistance torque under in-situ steering and low-speed steering.
When the vehicle is driving at medium or high speed, its lateral acceleration is relatively large, resulting in relatively large lateral forces on the wheels. Therefore, the steering resistance torque is mainly formed by the tire self-aligning force caused by the lateral force. At this time, the gravity-aligning torque accounts for a relatively small proportion. When the vehicle moves sideways and yaws, the traveling direction of the wheel relative to the ground is not in the rotation plane of the wheel. Because the wheel slides sideways, there is resistance perpendicular to the rotating surface of the wheel, which is lateral force. The component of the lateral force perpendicular to the direction of the wheel is called the cornering force. If the cornering angle is small, the two forces can be regarded as equivalent.
The cornering force causes the wheel plane to rotate in a direction consistent with the direction of vehicle movement. The product of cornering force and tire drag is the main component of tire self-aligning torque. The relationship between the cornering force and the cornering angle is non-linear. When the cornering angle is small, both the cornering force and the tire self-aligning moment are approximately proportional to the cornering angle. But when the cornering angle is getting bigger, the cornering force slowly increases and approaches the road adhesion limit, the tire starts to slip, and the tire self- aligning torque decreases. If the road surface has a low adhesion coefficient, the linear region and amplitude of the self-aligning moment of tires will be greatly reduced. Therefore, the reduction of the adhesion coefficient under high-speed conditions will cause the steering resistance torque to be greatly reduced.
In a word, whether in-situ steering, low-speed steering or high-speed steering, the reduction of the adhesion coefficient will lead to the reduction of the steering resistance torque. Therefore, the road surface adhesion coefficient is an important factor affecting the resistance torque of the steering system.
In order to verify the above theoretical analysis, simulations are designed based on Trucksim. The vehicle model parameters are shown in Table 1.
Commercial vehicle model parameters.

In the case of no power assist, under the speed of 60 km/h, turn the steering wheel to a certain angle and keep the steering wheel angle unchanged to keep the lateral acceleration is 0.15 g under different adhesion coefficient conditions (μ = 0.2, 0.3, 0.4, 0.5, 0.6, 0.7 and 0.8). The steering resistance torque is shown in Figure 1 and Table 2.

Steering resistance torque under different road surface adhesion coefficients.
Steering resistance torque under different road surface adhesion coefficients.

It can be seen from simulation results that the smaller the road surface adhesion coefficient, the smaller the steering resistance torque. In order to ensure the steering portability, EPS systems are generally designed under high adhesion coefficients. However, under low adhesion coefficient road surface, EPS system will generate too much power, which will affect driver’s road feeling. Therefore, in order to improve the driver’s road feeling when the vehicle is traveling on low-attached road surface, the EPS control strategy needs to consider the adhesion coefficient.
EPS control strategy based on steering resistance torque
Steering resistance torque under different adhesion coefficients
The in-situ steering resistance of the vehicle is all sliding friction, while the steering resistance during traveling includes both sliding friction and rotational friction. Therefore, it is necessary to calculate the in-situ steering resistance torque and the steering resistance torque during traveling separately.
The resistance torque of the vehicle in-situ steering, which is used as the maximum assisted steering torque in the EPS control strategy design, can be obtained from empirical formula (2). 14

where Tmax is the in-situ steering resistance torque; f is the friction coefficient between the tire and the pavement; G1 is the front axle load of the automobile; P is the tire air pressure.
For the steering resistance torque when the vehicle is traveling, it is obtained through a set of steering wheel angle step simulations. The process and parameters of the simulations are set as follows.
The adhesion coefficient is set to 0.2, 0.3, 0.4, 0.5, 0.6, 0.7 and 0.8 in TruckSim, and characteristic vehicle speed step is performed at constant speed of 20, 30, 40, 50, 60 and 70 km/h. When the adhesion coefficient is 0.8, 0.7, 0.6 and 0.5, turn the steering wheel at a constant speed until the lateral acceleration stabilizes to 0.3 g, then fix the steering wheel angle, and take the steering column torque at this time as the maximum steering resistance torque. Compared with passenger cars, commercial vehicles have a higher center of gravity, the risk of skidding and rollover is higher, so a conservative control strategy is generally adopted. As the adhesion coefficient decreases, the maximum allowable lateral acceleration corresponding to no sideslip also decreases. Therefore, as the adhesion coefficient decreases, in order to reduce the risk of sideslip or rollover of the vehicle, the lateral acceleration corresponding to the maximum steering resistance torque should be adjusted. Obtain the lateral acceleration of the vehicle when it slips on roads with different adhesion coefficients through simulation, and round it down, in order to keep the safety margin and make calculation easy.
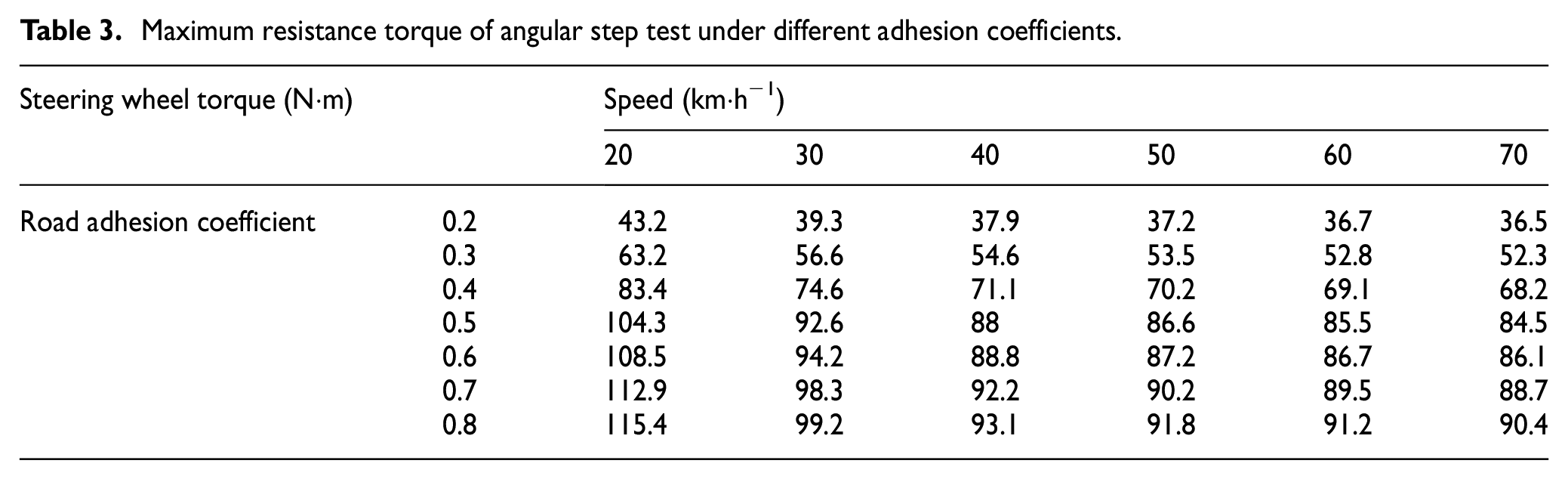
While the adhesion coefficient is 0.4, stabilize the lateral acceleration of the vehicle to 0.25 g. While the adhesion coefficient is 0.3, stabilize the lateral acceleration to 0.2 g. While the adhesion coefficient is 0.2, stabilize the lateral acceleration to 0.15 g. At different adhesion coefficients and characteristic vehicle speed, the maximum resistance torque of the steering wheel is shown in Table 3.
Maximum resistance torque of angular step test under different adhesion coefficients.
Power assist current characteristic curve design
In this paper, we use the linear power assisted current curve, whose form is shown in Figure 2 and expression is shown in equation (3). 15


where I is the assist current; k is the linear slope of the assist torque change region; Td is the steering wheel hand torque; Td0 is The hand torque threshold when the motor starts to assist, Td0 = 2 N·m is selected in order to make the steering not too sensitive; K(v, μ) is assist coefficient; Imax is the maximum assist current when the vehicle speed is zero and the adhesion coefficient is 0.8; Tdmax is the maximum hand torque. The industry standard QC/T 480-1999 stipulates that for commercial vehicles with a total mass greater than 15 t, the maximum tangential force applied by the driver on the steering wheel is 220 N and the average tangential force cannot exceed 140 N. 16 The diameter of steering wheel used in this paper is 50 cm, so average steering wheel torque can be up to 35 N·m. To reduce the possibility of motor overload, Tdmax = 25 N·m is selected in this paper.

Linear assist current characteristic curve.
The calculation formula of Imax is as shown in equation (6).


where Tcmax is the maximum resistance torque of the steering wheel;
The ideal assist torque of assist motor can be obtained from equation (7). Assist coefficient can be obtained from equations (8) and (9).



where Ta is assisting torque of assisting motor; Tc is steering column torque obtained by the simulation; Tamax is the assisting torque when vehicle speed is zero and adhesion coefficient is 0.8.
When designing the boosting curve, in order to ensure steering portability, we choose the angle step test value when the lateral acceleration is large as the maximum resistance torque. Comparing the values of the vehicle speed of 60 km/h in Tables 2 and 3, it can be seen that when the lateral acceleration is smaller, the steering resistance torque changes more slowly as the adhesion coefficient decreases. On low adhesion coefficient roads, generally the vehicle speed is low, and most of them operate in a situation where the lateral acceleration is small. Thus, when the lateral acceleration is small, the EPS assist torque reduction value due to the reduction of the adhesion coefficient is greater than the steering resistance torque reduction value due to the reduction of the adhesion coefficient, thereby making the hand torque larger. Therefore, the road feeling and driving safety are improved. The assist coefficients are shown in Table 4.
Assist coefficient with different adhesion coefficient and characteristic vehicle speed.
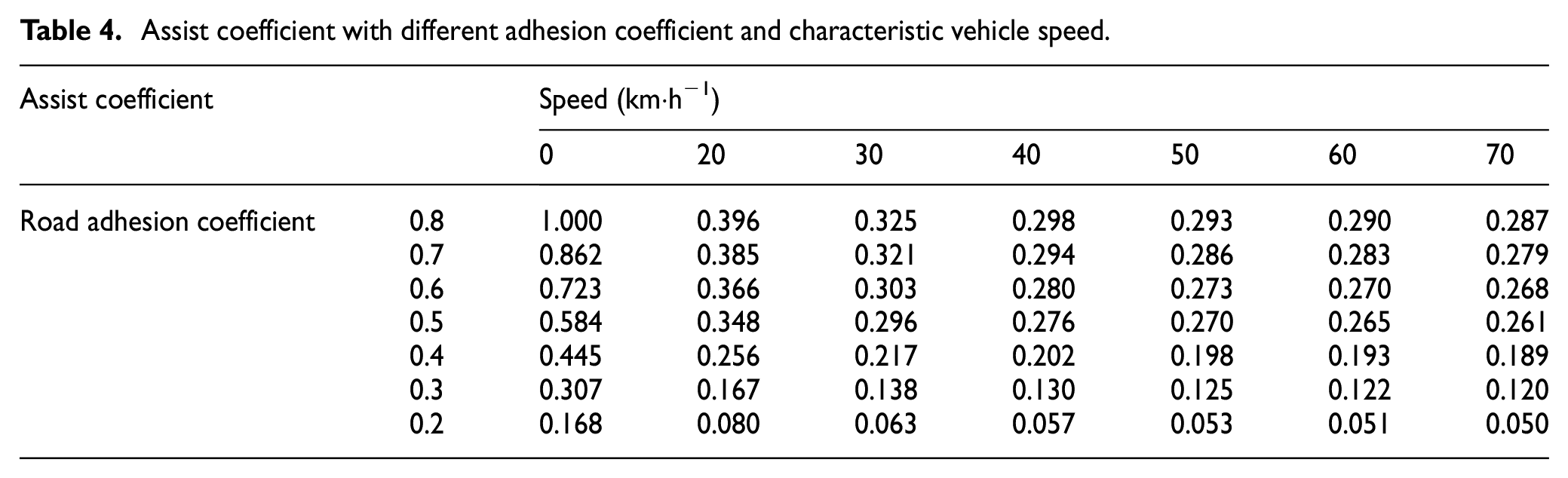
By fitting the assist coefficient of Table 4, the power assisted current curve of the commercial vehicle EPS system considering the adhesion coefficient can be obtained, as shown in Figure 3 and equation (10).


EPS assist coefficient considering adhesion coefficient.
EPS control strategy
The EPS control strategy based on the steering resistance torque considering the adhesion coefficient is shown in Figure 4.
According to the estimated value of the road surface adhesion coefficient and the real-time vehicle speed, the ECU calculates the assist coefficient K(v, μ) of the current working condition.
The maximum assist current under the current operating condition can be obtained by multiplying the assist coefficient K(v, μ) of current operating condition with the maximum assist current.
Taking into account the hand torque when the motor starts to work and the maximum hand torque, the linear power assist characteristic curve is obtained.
Substitute the current steering wheel hand torque into the corresponding assist curve to obtain the target assist current. PI controller controls the power assist motor to complete the power steering.

Control strategy flow chart.
EPS control strategy based on current compensation
Design of traditional EPS
This novel EPS control strategy is realized by applying a compensation current on the basis of traditional EPS control strategy. Therefore, before proposing a new control strategy, we need to design a traditional EPS control strategy first.
Based on in-situ steering resistance torque calculated by formula (2) and the steering wheel angle step simulation results with an adhesion coefficient of 0.8, a traditional EPS control strategy without considering the adhesion coefficient is designed. Linear power assisted current curve is adopted, and the selection of related parameters is the same as the control strategy above. The assist curve is shown in Figure 5.

Assist characteristic curve without considering adhesion coefficient.
Current compensation based on fuzzy control
Based on the traditional EPS control strategy without considering the adhesion coefficient, this control strategy is designed by compensating the compensation current. The compensation current and the target current after applying the compensation current are respectively shown by equations (11) and (12).


where Ic is the compensation current; K is the compensation current coefficient; θw is the steering wheel angle; Iμ is the target current after considering the adhesion coefficient; and It is the target current without considering the adhesion coefficient.
It can be seen from the above analysis that in order to enhance the road feeling, the compensation current should increase as the adhesion coefficient decreases. The relationship between the vehicle speed and the steering hand torque is positively correlated, so the compensation current should increase as the vehicle speed increases. Therefore, the value of the compensation current coefficient is related to the adhesion coefficient and the vehicle speed.
In this paper, fuzzy control is used to determine the value of compensation current coefficient. The input of the fuzzy controller is the adhesion coefficient and vehicle speed, and the output is the compensation current coefficient. The block diagram of current compensation EPS control strategy based on fuzzy control is shown in Figure 6. The fuzzy control system outputs a compensation current coefficient based on the adhesion coefficient and the vehicle speed. The compensation current is obtained from the steering wheel angle and compensation current coefficient. The target assistance current is obtained by subtracting the compensation current from the assist current without considering the adhesion coefficient.

EPS compensation strategy based on fuzzy control.
Define the universe of the adhesion coefficient as A {1, 2, 3, 4, 5, 6, 7, 8}, and the quantization factor Kμ = 10. The universe A of the attachment coefficient is divided into five fuzzy subsets {S, MS, M, MB, B}. The membership function is shown in Figure 7.

Distribution of membership function of adhesion coefficient.
Since the maximum speed of the commercial vehicle selected in this paper is 70 km/h, the vehicle speed universe is defined as B {0, 1, 2, 3, 4, 5, 6, 7}, and the quantization factor Kv = 0.1. The speed universe B is divided into 6 fuzzy subsets {ZO, S, MS, M, MB, B}. The membership function is shown in Figure 8.

Distribution of membership function of vehicle speed.
The current compensation coefficient universe is defined as C {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10}, and the scale factor KK = 0.025. The compensation current coefficient universe C is divided into 8 fuzzy subsets {ZO, S, MS, M, MB, B, VB, GB}. The membership function is shown in Figure 9.

Distribution of membership function of compensation current coefficient.
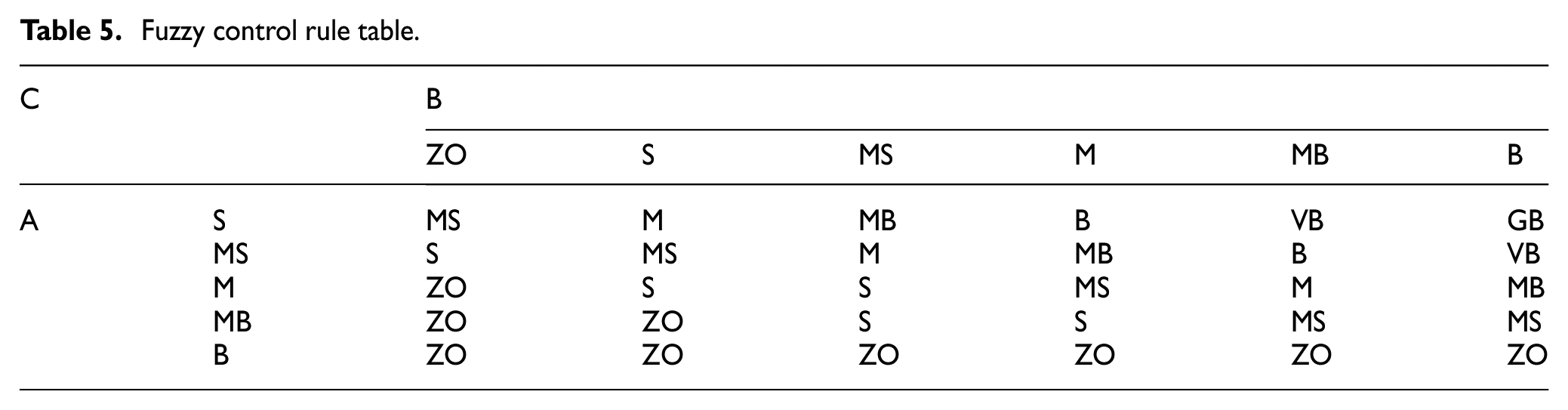
The table of fuzzy control rules is shown in Table 5, and the three-dimensional relationship of input-output variables is shown in Figure 10. Select Mamdani type for fuzzy control rules.
Fuzzy control rule table.

Three-dimensional relationship of input-output variables.
Simulation evaluation
Steering portability evaluation
In order to evaluate the steering portability of two EPS systems considering the adhesion coefficient, this paper designs a lemniscate test based on the relevant requirements in GB/T 6323-2014. 17 Set the path of the lemniscate in Trucksim according to the requirements of the standard, and set the steering strategy to the path following mode. The vehicle speed is set at 10 km/h, and the lemniscate test is carried out under the conditions of adhesion coefficient of 0.2, 0.4 and 0.8 respectively. The test results are shown in Figure 11. In the Figure 11, New EPS represents EPS control strategy based on steering resistance torque, and Fuzzy EPS represents EPS control strategy based on current compensation.
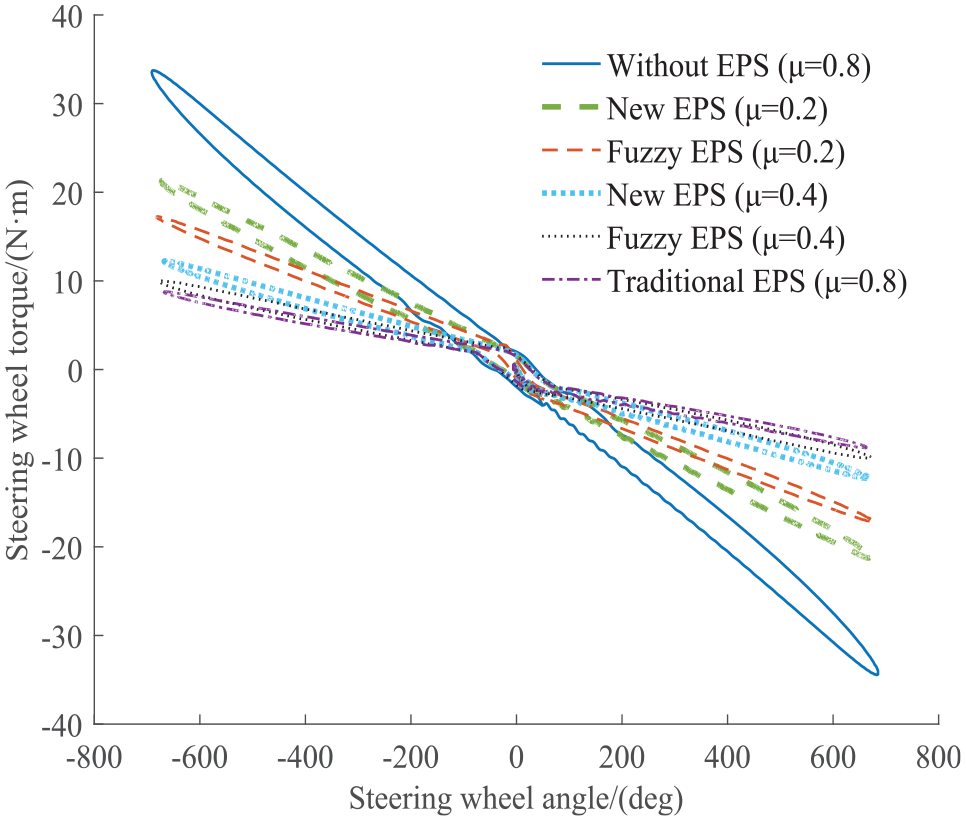
Steering wheel angle and torque relationship.
On the pavement with good adhesion conditions, both of the two novel EPS steering assist characteristics designed in this paper are similar to traditional EPS. As can be seen from Figure 11, when the adhesion coefficient is 0.8, the maximum steering wheel torque of traditional EPS is 8.8 N, which has good steering portability. When the vehicle is driving on a road with a low adhesion coefficient, the driver’s hand torque using two novel EPS strategies has increased. Therefore, the possibility of the driver operating the steering wheel incorrectly on low-adhesion road is reduced, and driving safety is improved.
According to the maximum steering force scoring standard in the QC/T 480-1999, the EPS system’s steering portability is scored. The evaluation formula is shown in equation (13), where NFm is the evaluation score of the maximum steering force of the steering wheel; Fm is the test value of the maximum steering force; Fm60 is the lower limit of the maximum steering force of the steering wheel; Fm100 is the upper limit of the maximum steering force of the steering wheel. For vehicles with a maximum total mass greater than 15 t, Fm60 is taken as 220 and Fm100 is taken as 110.

It can be seen from Figure 11 that the maximum steering wheel torque of the new EPS is 21.3 N·m, the maximum tangential force of the steering wheel is 85.2 N, and the calculated point NFm is 109.0. The standard stipulates that if the evaluation score is greater than 100, it is recorded as 100 points. The maximum steering wheel torque of the fuzzy EPS is 17.2 N·m, so the maximum tangential force of the steering wheel is 68.8 N, and the calculated score NFm is 115.0 points. The evaluation score of the current compensation EPS control system based on fuzzy control is also 100 points. According to the results of the simulation, the two novel EPS control strategies both make the vehicle have good steering portability.
Central turning area road feeling analysis
In order to analyze the road feeling, this paper designed the central turning area road feeling test. 18 The test vehicle speed is 60 km/h, and the steering wheel inputs a sinusoidal signal of 0.2 Hz. In order to avoid the vehicle side slip on the road with low adhesion coefficient, the lateral acceleration peaks under different working conditions are all around 0.15 g. The test results are shown in Figure 12.

Lateral acceleration and steering wheel torque curve.
The steering wheel torque gradient is selected as the evaluation index. The steering wheel torque gradient when the lateral acceleration is 0 g represents the road feeling during straight driving, and the steering wheel torque gradient when the lateral acceleration is ±0.1 g represents the road feeling during just leaving the straight line.19–21 The steering wheel torque gradient at different lateral accelerations can be obtained from Figure 12, and the results are shown in Table 6.
Steering wheel torque gradient [N·m·(9.8 m·s−2)−1].

It can be seen from Table 6 that under different lateral acceleration conditions, the steering wheel torque gradient of the new EPS is greater than that of the traditional EPS, indicating that the new EPS system effectively improves the road feeling of the center of the turning area. The lower the adhesion coefficient, the higher the steering wheel torque gradient with the new EPS, the better the effect of reminding the driver of the current road surface adhesion coefficient.
The current compensation EPS control system based on fuzzy control can also improve the steering wheel torque gradient under most operating conditions. However, due to the increase in steering wheel torque hysteresis, using fuzzy EPS decreases the steering wheel torque gradient when the vehicle leaves the straight driving state under an adhesion coefficient of 0.4.
Steering transient response characteristic evaluation
In order to evaluate the transient response characteristics of commercial vehicles after applying the two novel EPS control strategies designed in this paper, a steering wheel angle step test is designed. 17 In the simulation, the vehicle speed is set to 60 km/h; before 0.5 s the steering wheel angle is set to 0, and the steering wheel angle is rotated to 80° at an angular velocity of 400 deg/s at 0.5 s, then the steering wheel angle remains at 80°. The road adhesion coefficient is set to 0.4.
The data of lateral acceleration is shown in Figure 13 and Table 7. The data of yaw rate is shown in the Figure 14 and Table 8.

Lateral acceleration graph.
Lateral acceleration data.


Yaw rate curve.
Yaw rate data.
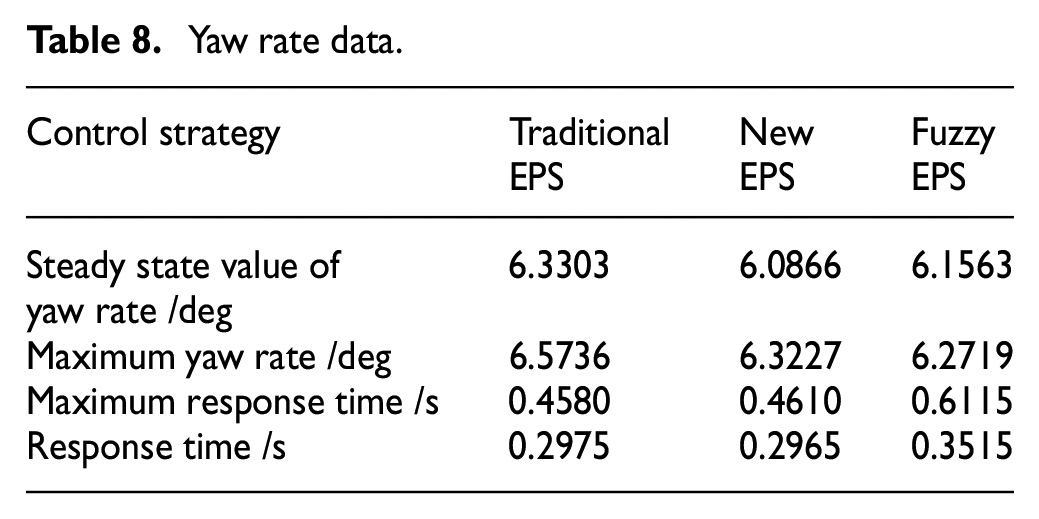
It can be seen from the simulation results that, compared with the traditional EPS, the transient response characteristics of the new EPS are better. But after applying fuzzy EPS, the transient response characteristics are worse than traditional EPS.
When the steering wheel angles are the same, the yaw rate and lateral acceleration after applying novel EPS strategies considering adhesion coefficient are smaller than those of traditional EPS, indicating that the vehicle stability is better after applying novel EPS strategies under the condition of instantaneous large turning angles, which is of great significance for commercial vehicles with a high center of gravity and a large load.
Conclusion
The change of road adhesion coefficient will affect the steering resistance torque. The traditional EPS control strategy is designed based on a high adhesion coefficient. When the vehicle is driving on a low adhesion coefficient road, there will be too much assistance torque, which will reduce the driver’s road feeling and affect safety. Therefore, the EPS control strategy design needs to consider the adhesion coefficient. This paper proposes two novel commercial vehicle EPS control strategies based on steering resistance torque and current compensation considering adhesion coefficient.
By building a TruckSim/Simulink joint simulation model, two novel EPS control strategies are simulated and evaluated. The simulation results show that the two novel EPS control strategies have good steering portability. Comparing the two novel EPS control strategies, the latter has better steering portability than the former. Both of the two novel EPS control strategies can improve the driver’s road feeling when the vehicle is driving on a road with low adhesion coefficient. Comparing the two novel EPS control strategies, the former improves road feeling better than the latter. The EPS control strategy based on steering resistance torque can simultaneously improve the transient steering response characteristics and the stability of the vehicle at transient large steering angles. The EPS control strategy based on current compensation can improve the stability of transient steering, but the transient steering response characteristics become worse. Through simulation evaluation, it can be obtained that the control effect of the EPS control strategy based on steering torque is better than that of the control strategy based on current compensation.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation (NNSF) of China (Grant No. 51207012); Natural Science Foundation of Shanxi Province (Grant No. 2020JQ-385); Special Fund for Basic Scientific Research of Central Colleagues, Chang’an University (Grant No. 300102228201).