
Abstract
The oil film among meshing teeth is just like a spring-damping element, and it can dominate the friction and meshing characteristics of the gear pair and influence its dynamic performances further. Thus, this article focuses on a double-helical gear system and makes efforts to consider the effect of the oil film among meshing teeth more deeply, which can enhance the precision of dynamic analysis for the gear system. First, based on the elasto-hydrodynamic lubrication theory and “microtomy” method, the models of friction and meshing characteristics are developed including the friction state and spring-damping effect of the oil film among meshing teeth; then, the dynamic models of the double-helical gear system with the effect of the oil film among meshing teeth are established, and finally, the experiments are carried out to verify the value of the models developed in this article. According to the theoretical and experimental analyses, it can be seen that the dynamic model considering the effect of the oil film among the meshing teeth is more precise and practical, and the effect of the oil film should be considered in the dynamic analysis of the gear system, especially at the condition with heavy load or high speed.
Introduction
The gear system is widely applied in various mechanical engineering fields to transmit motion and power. For the gear meshing, appropriate lubrication can reduce its friction and prolong its life span. 1 That is the reason of the lubrication, and friction analysis always plays an important role in the design of the gear system. On the other hand, with the increase in rotating speed and power density, the problems of the vibration and noise of the gear system cannot be neglected, which are caused by the internal and external excitations such as the time-varying meshing stiffness and transmission error, 2 and make the dynamic analysis becomes a major interest in the gear industrial sector.
For many decades, lots of research studies have been carried out on the dynamic analysis and lubrication design of the gear system. The research studies on the gear dynamics start from a spring-mass model proposed by Tuplin in 1950. From then on, the dynamic model of the gear system coupling with bend and torsion is developed gradually. Nowadays, the dynamic model of the gear system has contained the time-varying meshing stiffness, transmission error, backlash, supporting stiffness, tooth breakage, and so on,3–6 while the lubrication and friction analysis of the gear pair is updating with the development of elasto-hydrodynamic lubrication (EHL) theory. In 1959, Dowson and Higginson 7 proposed an isothermal model of minimum oil film thickness for EHL, which is still applied in the engineering field until now. Today, based on the EHL theory, the lubrication and friction analysis of the gear pair contains much more practical factors, such as friction state, surface roughness, non-Newton effect, tooth profile error, and so on.8–10 Obviously, because of the dynamic condition, the state and behavior of oil film among the meshing teeth change with the action of the dynamic meshing force, and the oil film reacts on the mesh characteristics of the gear pair. It means that there is coupling effect between the dynamic behavior and lubrication characteristics in the gear system.
Recently, a few researchers developed the dynamic model of the gear system considering the friction of the gear pair, which is called the tribo-dynamic model.11–15 The results of tribo-dynamic analysis prove the coupling effect between lubrication and dynamic performances of the gear system, and show that the lubrication can affect the dynamic behavior such as meshing force or dynamic response. But, the relative research studies almost focus on the influence of the friction on the dynamic performances of the gear system, the stiffness of oil film is almost neglected or simplified as squeeze film, and the damping of oil film is totally neglected. Besides, the double-helical (DH) gear is fit to work at high speed and heavy load conditions due to its high carrying capacity and operation stability,16,17 which would involve strong coupling effect between the dynamic behavior and lubrication, but the mentioned research almost focuses on the spur gear. Thus, this article focuses on the DH gear system and considers the friction, stiffness, and damping caused by oil film among the meshing teeth to build a more practical dynamic model, and with the dynamic model built in this article, the effect of the oil film among the meshing teeth on the dynamic behaviors of the gear system is analyzed; furthermore, an experiment study is carried out to verify the theoretical and practical value of the models proposed in this article.
Calculation models of the friction and meshing characteristics considering the oil film among meshing teeth
Due to the dynamic condition of the gear system, the thickness of oil film among the meshing teeth is changed periodically; this makes the friction state, oil film stiffness, and damping change and then influences the dynamic performances of the gear system. Thus, to establish the dynamic model of the gear system considering the effect of the oil film among the meshing teeth, a key procedure is developing the calculation models of the friction at various friction states and the meshing characteristics considering the oil film stiffness and damping.
For the DH gear pair, its friction and meshing characteristics are often approximated as those at meshing pitch line, which decreases the precision. Thus, in this article, the “microtomy” method is applied to establish the calculation models of friction and meshing characteristics for the DH gear pair with high precision.
Calculation model of the friction characteristics
As shown in Figure 1, the contact ratio of the gear pair is greater than 1 to enhance the carrying capacity and operation stability, so there are several pairs of teeth meshing at a certain time; it means that several lines of action (LOAs) exist in the plane of action (POA). The “microtomy” method assumes that there are n LOAs in the POA at a certain time, and the DH gear is cut into m pieces of slices symmetrically. Thus, for each slice of the DH gear, the DH gear can be seen as spur gear due to its extremely small breadth. Then, for jth segment of the LOA in ith LOA at time t, based on the Dowson–Higginson equation, the minimum oil film thickness can be obtained as the following
where F is the load acting on this LOA and lc, Rc, and uR are the length, equivalent curvature radius, and entrainment velocity of this LOA, respectively; they can be calculated with the geometrical and kinematic analyses of the gear pair, and they are obtained on the middle plane of each slice approximately; η0 and α are the dynamic viscosity and pressure viscosity coefficient of the lubricant, respectively; Ec is the equivalent elasticity modulus, its equation is

Change of LOA in POA.
Then, the friction state of this LOA can be distinguished with the film thickness ratio λ: 18 if λ < 1, the friction state is the boundary friction state, and it is assumed that the load is mainly supported by rough peak contact; if 1 ≤ λ ≤ 3, the friction state is the mixed friction state, it can be assumed that the load is supported by rough peak contact and oil film; if λ > 3, the friction state is the fluid friction state, and it is assumed that the load is totally supported by oil film. The film thickness ratio λ is defined as

where Rq is the root-mean-square (RMS) of the surface roughness.
For various friction states, with the supporting ratio of rough peak contact or oil film, the friction coefficient at various friction states can be expressed with the following equation

where sc is the supporting ratio of rough peak contact and it can be obtained with the equation in Hu and Zhu 19

μc is the friction coefficient of rough peak contact. In this article, it is calculated with the equation under the boundary friction state proposed by Wang and Ping 20

In which, Fc = F·sc is the load that is supported by rough peak contact.
And μl is the friction coefficient of oil film; in this article, it is calculated with the equation of the EHL friction coefficient proposed by Xu et al 21

In which,
With the analyses above, for the jth segment of the LOA in ith LOA at time t, its friction characteristics can be expressed as
where μ, Ff, and Tf are the friction coefficient, friction force, and friction torque of the gear pair respectively; rf is the arm of friction force; sign(t) is the sign function of the friction force, its equation is

In which, T is the meshing periodic of the gear pair; “mod” is the cofunction;
And finally, the friction characteristics of the gear pair at time t can be obtained with the superposition of every segment of the LOA

Calculation model of the meshing characteristics
In this article, it is assumed that the meshing stiffness and damping distribute along the LOA symmetrically, 22 and define the average of the meshing stiffness and damping of every segment of the LOA as the average meshing stiffness and damping. Thus, the meshing stiffness and damping can be expressed as

where, kma and cma are the average of the meshing stiffness and damping of a certain segment of the LOA, respectively.
With the judging criteria of friction state mentioned above and taking the calculation of dynamic performances of the rolling bearing for reference, the meshing stiffness and damping of a certain segment of the LOA at various friction states can be described as the following:
1. If the friction state is the boundary friction state, the load is mainly supported by rough peak contact; the meshing stiffness can be calculated with the traditional model which does not consider the effect of the oil film 16

where εα is the transverse contact ratio of the gear pair and q′ is the maximum flexibility of a single pair of the meshing teeth, its equation is

In which, x is the modification coefficient and zv is the equivalent number of the teeth.
Because the damping of the boundary friction and materials is difficult to calculate, the meshing damping under boundary friction is calculated with the damping ratio in this article 23

where ξc is the damping ratio and its value is 0.03∼0.17 in general and ξc = 0.1 in this article;
2. For the fluid friction state, the meshing stiffness and damping can be seemed as the stiffness and damping of oil film connecting with the inherent stiffness and damping of the teeth in series. Thus, referring to the treatment of dynamic performances of the rolling bearing at the fluid friction state, the meshing stiffness and damping at fluid friction state can be expressed as

where kt and ct are the inherent stiffness and damping of the teeth, respectively. The stiffness of the teeth can be calculated with the mechanical analysis, while the damping is also calculated with the damping ratio as shown in equation (13); kla and cla are the stiffness and damping of oil film, respectively; the stiffness of the oil film is calculated with the derivative of the load to the oil film thickness

And the damping of the oil film is calculated with the equation proposed by Ankouni 24

In which ηq and αq are the dynamic viscosity and pressure viscosity coefficient of the lubricant under the standard atmospheric pressure, respectively.
3. While for the mixed friction state, the meshing stiffness and damping can be seemed as the combination of those at the boundary and fluid friction states. That means the meshing stiffness and damping at the mixed friction state can be obtained with the parallel connection of those at the boundary friction state and fluid friction state according to the supporting ratios of the rough peak contact and oil film. Thus, the meshing stiffness and damping at mixed friction state can be expressed as

where kba, cba, kfa, and cfa are the meshing stiffness and damping at the boundary and fluid friction states.
Dynamic model of the DH gear system
According to the above analyses, a dynamic model of a single-stage DH gear system is built with the lumped-mass method (as shown in Figure 2, the DH gear is seemed as the assembly of two helical gears with the same structure parameters except the helical angle). In Figure 2, the subscripts 1 and 2 are the left and right gear pair, respectively; X, Y, and Z are the coordinate axes along the horizontal, vertical, and axial directions, respectively; the subscripts x, y, and z represent the coordinate directions; e is the synthetical meshing error; FB is the supporting force of bearing; km and cm are the meshing stiffness and damping of the gear pair; kb and cb are the bending stiffness and damping of the shaft connecting the two helical gears; kbz and cbz are the axial stiffness and damping of the shaft connecting the two helical gears; kt and ct are the torsional stiffness and damping of the shaft connecting the two helical gears; kz and cz are the supporting stiffness and damping along the axial direction; and Tp and Tg are the input and output torque, respectively.

Dynamic model of DH gear system: (a) Isometric view. (b) Lateral view.
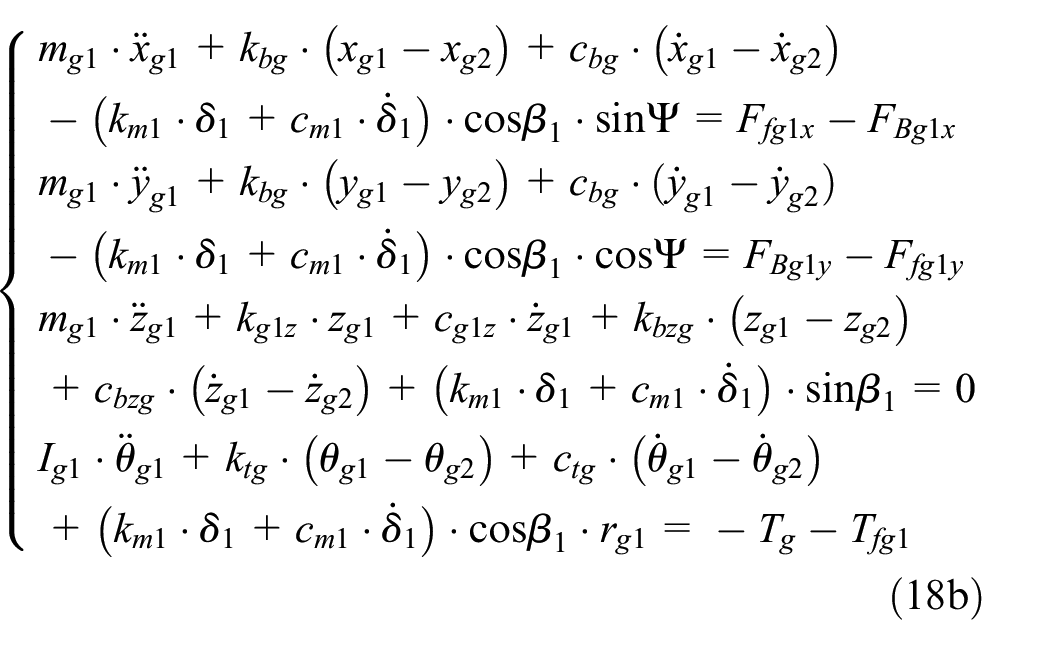
The dynamic equations of the model shown in Figure 2 are as following
For gear p1

For gear g1
For gear p2

For gear g2

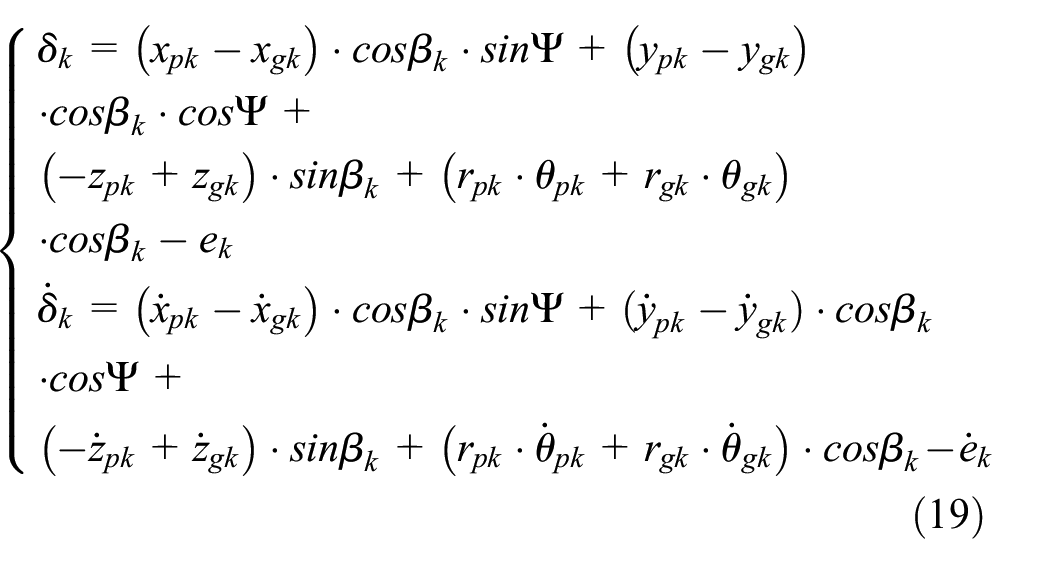
where β is the helical angle and β1 = −β2; ψ is the angle between the POA and Y-axis; m is the mass of the gear; ek(t) = emksin(ωmkt), in which em and ωm are the average meshing error and meshing frequency, respectively, and the subscripts k = 1 or 2; x,
Based on the calculated models of friction and meshing characteristics considering the effect of the oil film among the meshing teeth and the dynamic model above, and after the procedures of eliminating rigid body displacement and nondimensionalize, the dynamic performances of the DH gear system are obtained with the Runge–kutta method.
Results and discussion
In this article, the dynamic performances of the DH gear system are calculated with three various models. The first one is called TE-model in this article. This model only considers the synthetical meshing error and the time-varying friction of the gear pair, and the meshing stiffness and damping are not considered, and they are all constants in this model; the second one is the model considering the synthetical meshing error, and the friction of the gear pair or the time-varying meshing stiffness and damping, but do not consider the effect of the oil film among the meshing teeth on the friction and meshing characteristics, it is called WL-model; the last one is the model built in sections “Calculation models of the friction and meshing characteristics considering the oil film among meshing teeth” and “Dynamic model of the DH gear system,” which considers the effect of the oil film based on the WL-model, and is called IL-model in this article. This article will reveal the effect of the oil film among the meshing teeth on the dynamic performances with the comparison between the results of the three models. And the parameters of the DH gear and fluid used in the analysis are shown in Table 1.
Structural parameters of DH gear pair and physical parameters of fluid.

DH: double-helical.
Considering the time-varying meshing stiffness and damping in the WL-model and IL-model only, at the input torque Tp = 200 N m and input rotating speed np = 5000 r/min, Figure 3 shows the dynamic performances of the DH gear system along the LOA direction under the excitations of time-varying meshing stiffness and damping with/without the effect of the oil film; the calculated results of the TE-model are also given in the figures. And Figure 4 shows the RMSs of the dimensionless vibration acceleration along the LOA direction at various operating conditions.

Dynamic performances of DH gear system along LOA direction under the excitations of time-varying meshing stiffness and damping (Tp = 200 N m and np = 5000 r/min): (a) Time-domain response of meshing stiffness. (b) Time-domain response of meshing damping. (c) Face diagram. (d) Time-domain response of meshing force. (e) Time-domain response of vibration displacement. (f) FFT spectrum of vibration displacement. (g) Time-domain response of vibration velocity. (h) FFT spectrum of vibration velocity. (i) Time-domain response of vibration acceleration. (j) FFT spectrum of vibration acceleration.
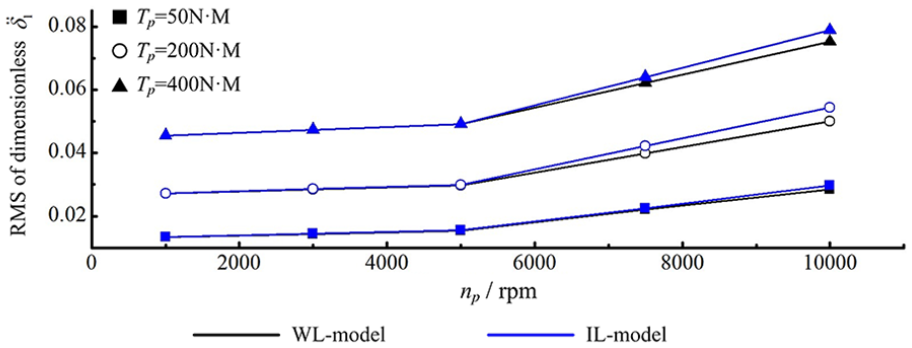
RMSs of dimensionless vibration acceleration along LOA direction at various operating conditions under the excitations of time-varying meshing stiffness and damping.
As it is known, if only considering the synthetical meshing error in the dynamic analysis of the gear system, its face diagram is an elliptic curve, its dynamic response is the harmonic periodic response, 2 and its main harmonic component of the vibration is the fundamental harmonic (as shown with the red line in Figure 3). Thus, according to the results of the WL-model shown in Figure 3, after considering the time-varying meshing stiffness and damping, the face diagram becomes an irregular and occlusive curve; the dynamic response is not harmonic, and the harmonic components of the vibration not only contain the fundamental harmonic but also contain its multiple frequency harmonics (two times, three times, or four times); the results indicate that the dynamic response of the DH gear system has become a disharmonic periodic response. Furthermore, according to the results of the IL-model shown in Figure 3, after considering the effect of the oil film in the time-varying meshing stiffness and damping, the meshing stiffness and damping decrease; its dynamic response is also the disharmonic periodic response, but the vibration amplitude becomes larger than that of the WL-model. And according to the results shown in Figure 4, with the increase in input torque or rotating speed, the RMS of dimensionless vibration acceleration increases gradually and the conclusion is quite similar with that in relevant references,2,17 but the results of the IL-model is larger than those of the WL-model, especially at the condition with heavy load and high speed.
Considering the friction of the gear pair in the WL-model and IL-model only, Figures 5 and 6 show the dynamic performances of the DH gear system along the LOA direction under the friction excitation with/without the effect of the oil film; the calculated results of the TE-model are also given in the figures.

Dynamic performances of DH gear system along LOA direction under friction excitation (Tp = 200 N m and np = 5000 r/m): (a) Time-domain response of meshing stiffness. (b) Time-domain response of meshing damping. (c) Face diagram. (d) Time-domain response of meshing force. (e) Time-domain response of vibration displacement. (f) FFT spectrum of vibration displacement. (g) Time-domain response of vibration velocity. (h) FFT spectrum of vibration velocity. (i) Time-domain response of vibration acceleration. (j) FFT spectrum of vibration acceleration.

RMSs of dimensionless vibration acceleration along LOA direction at various operating conditions under friction excitation.
According to the results of the WL-model shown in Figure 5, after considering the friction excitation, the dynamic response also changes, the harmonic components of the vibration also contain the fundamental harmonic and its multiple frequency harmonics, but the amplitudes of the multiple frequency harmonics are very small; so its face diagram is seemed as an elliptic curve, and its dynamic response is seemed as a harmonic periodic response; this indicates the influence of friction on the dynamic performance is smaller than that of the meshing stiffness and damping, which has been proved in Sondkar and Kahraman. 4 Furthermore, due to the damping effect of frictions, the vibration amplitude decreases after considering the friction excitation. Thus, after considering the effect of the oil film, the friction decreases, so the vibration amplitude increases slightly comparing with that of the WL-model. The similar conclusions can be obtained according to Figure 6. After considering the friction excitation, the RMS of dimensionless vibration acceleration still increases with the enhancing of input torque or rotating speed; due to the effect of the oil film, the vibration acceleration of the IL-model is smaller than that of the WL-model, and the gap between the results of the WL-model and IL-model becomes larger with the enhancement of the load or speed.
Finally, the dynamic performances of the DH gear system are calculated considering the excitations of friction and time-varying meshing characteristics synthetically. The results are shown in Figures 7 and 8. The results are also obtained with/without the effect of the oil film, and the calculated results of the TE-model are also given in the figures. As shown in the figures, the dynamic response of the DH gear system under multiple excitations is the disharmonic periodic response; compared with the results considering the excitation of friction or time-varying meshing characteristics only, the amplitude of dynamic response under multiple excitations is larger, and after considering the effect of the oil film in the multiple excitations, the amplitude of dynamic response increases further; moreover, with the increase in input torque or rotating speed, the gap between the results of the WL-model and IL-model becomes larger. The results indicate that the effect of the oil film among the meshing teeth should be considered to enhance the precision of dynamic analysis for the gear system, especially at the conditions with heavy load or high speed.

Dynamic performances of DH gear system along LOA direction under multiple excitations (Tp = 200 N m and np = 5000 r/min): (a) Face diagram. (b) Time-domain response of meshing force. (c) Time-domain response of vibration displacement. (d) FFT spectrum of vibration displacement. (e) Time-domain response of vibration velocity. (f) FFT spectrum of vibration velocity. (g) Time-domain response of vibration acceleration. (h) FFT spectrum of vibration acceleration.
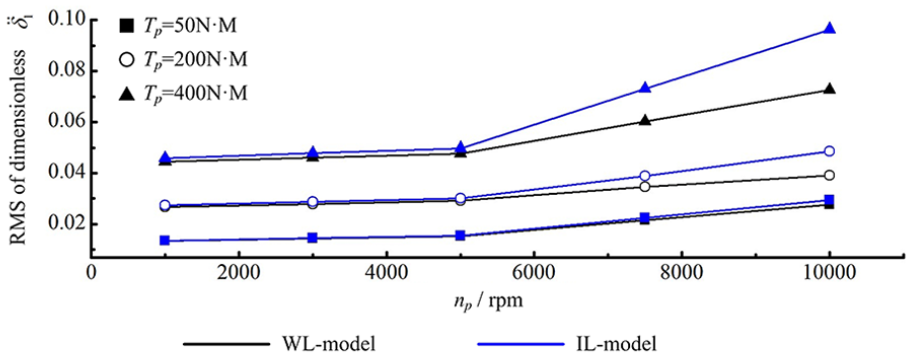
RMSs of dimensionless vibration acceleration along LOA direction at various operating conditions under multiple excitations.
Experiments and verification
In this article, the dynamic experiments of a single-stage DH gear system at some operating conditions are carried out with a self-developed test rig, and the theoretical dynamic performances are calculated with the WL-model and IL-model under multiple excitations. Then, the comparison between the experimental and theoretical results is carried out to verify the rationality and reliability of the models proposed in this article. The arrangement of the test rig is shown in Figure 9, and the structural parameters of the DH gear system in the experiments are identical with those shown in Table 1. And the experimental and theoretical analyses are carried out at three kinds of input torques (130, 217, and 290 N m) and six kinds of input rotating speeds (1170, 1420, 1680, 1940, 2220 and 2495 r/min.).

Test rig for dynamic performances of DH gear system.
As shown in Figure 9, the test rig is mainly consisted of the driven motor, reaction gearbox, test gearbox, testing components (angle encoders, speed and torque meter), loading components (loading flange), and lubrication and cooling system. The power of the test rig is supplied by a direct-current motor (its rated power is 80 KW); the test rig takes advantage of the closed power flow, so the drag torque of the test gearbox can be used to drive the reaction gearbox, which can reduce the power loss in the experiments effectively; the lubrication and cooling system supplies lubricant (the lubricant type is CD40) for the gear pair and bearings; the drag torque is produced with the loading flange; with reversing the loading flange, the shaft connected with the loading flange is reversed, so the drag torque can be transmitted to the output shaft of the test gearbox through the loading flange; in the experiment, there are two angle encoders connecting with the test gearbox to measure the dynamic angle displacement of the gear pair. Then, the relative vibration displacement and acceleration of the gear pair along the LOA direction can be obtained with the followed equation

where z is the number of the teeth, Φ is the angle displacement measured by angle encoders, and Φ0 is the initial angle of the gear pair.
Furthermore, it is known that the theoretical model cannot consider all the practical factors, which makes the gap between the experimental and theoretical results. In this article, the theoretical dynamic model of the DH gear system considers the excitations of friction and time-varying meshing characteristics, and the effect of the oil film is also considered. But, some other practical factors (such as unbalance mass, installation error, instability of input torque, and so on) would influence the experimental results and perplex the comparison between the experimental and theoretical results. Thus, the filtering processing is taken on the original experimental signal (as shown in Figure 10) to extract the fundamental harmonic components. And then, the theoretical results are compared with the experimental results after filtering processing to verify the practical value of considering the effect of the oil film in the dynamic analysis.

An example of signal processing on experimental results (Tp = 217 N m and np = 1940 r/min).
Figure 11 shows the comparison between experimental and theoretical results on the fast Fourier transform (FFT) spectrum of relative vibration displacement along LOA direction at Tp = 217 N m, and Figure 12 shows the comparison between experimental and theoretical results on the RMS of relative vibration acceleration along the LOA direction. As shown in the figures, even though the original experimental results have been filtered, but because of the measuring errors and some other practical factors that cannot be erased with the filtering processing, there is still a certain gap between the experimental and theoretical results, especially at np = 1680 r/min, the vibration amplitude of the experimental results increase suddenly, which may be caused by resonance of some parts. But for the harmonic components and their proportions of the vibration, the experimental and theoretical results are almost the same, and the variation trends of vibration amplitude with the load and rotating speed in experimental and theoretical results are also accordant. Furthermore, compared with the theoretical results of the WL-model, the theoretical results of the IL-model is more approximate with the experimental results, which shows the dynamic model considering the effect of the oil film among the meshing teeth is more precise and practical.

Experimental and theoretical results on the FFT spectrum of relative vibration displacement along LOA direction at Tp = 217 N m: (a) np = 1170 r/min. (b) np = 1940 r/min. (c) np = 2220 r/min.

Experimental and theoretical results on the RMSs of relative vibration acceleration along LOA direction:(a) Tp = 130 N m. (b) Tp = 217 N m. (c) Tp = 290 N m.
Conclusion
This article focuses on the DH gear system and the coupling effect between the lubrication and dynamics; based on considering the friction state and spring-damping effect of the oil film among the meshing teeth, the more precise models of the friction and meshing characteristics of the DH gear system are developed with the “microtomy” method and, finally, proposed the dynamic model of the DH gear system with the effect of oil film among the meshing teeth. According to the theoretical and experimental results in this article, it can be found that the dynamic model considering the effect of the oil film among the meshing teeth is more precise and practical, and the effect of the oil film should be considered in the dynamic analysis of the gear system, especially at the conditions with high speed or heavy load.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the China Postdoctoral Science Foundation (Grant No. 2019M653879XB), National Natural Science Foundation of China (Grant No. 51705419) and Shaanxi Basic research plan of Natural Science (Grant No. 2019JQ-307).