
Abstract
The dynamic behaviour of a double-helical gear system supported by journal bearings is theoretically and experimentally investigated in this study. A bending–torsional–axial coupling model for dynamic analysis of double-helical gear system is developed. Influence of the time-varying mesh stiffness and damping is considered. Oil film stiffness and damping of the supporting journal bearing are supposed to be time-varying, and the time-varying oil film stiffness and damping are predicted by a back propagation neural network, which is optimized by genetic algorithm. A double-helical gear–rotor–journal bearing system test rig is also established to carry out the experimental investigations, such as the dynamic transmission errors of gear pairs. The comparisons between theoretical and experimental results show that the time-varying oil film dynamic coefficients of journal bearings are an important internal excitation. The theoretical model with time-varying oil film stiffness and damping can predict the gear dynamics more accurate than the model with time-invariant oil film stiffness and damping, and the neural network optimized by genetic algorithm can obtain the time-varying oil film stiffness and damping efficiently and accurately for the dynamic analysis of double-helical gear system.
Keywords
Introduction
The double-helical (DH) gears have the advantages of high carrying capacity, smooth transmission and no axial load, while the fluid film journal bearings have the advantages of high stability and long lifespan. Due to the above-mentioned advantages, a transmission system with the two parts, DH gears supported by journal bearings, has advantages of high carrying capacity, high operation stability, low noise and vibration performance and is widely used in marine propulsion system.1,2
Some studies have been published on the performance of DH gears,3–6 such as load distribution, static motion transmission error and vibrations. Chen et al. 7 analysed the dynamics of a DH gear transmission system with finite element method. Liu et al.8,9 studied dynamic characteristics of the DH planetary gear set under different friction coefficients during variable speed process. Ren and colleagues10,11 investigated the effect of manufacturing errors on dynamic characteristics and load sharing of DH planetary gear trains.
However, the studies on dynamics of DH gear system supported by journal bearings are few. Theodossiades and Natsiavas 12 investigated response and stability characteristics of rotordynamic systems interconnected with gear pairs and supported on journal bearings, and the results indicated that the non-linearities are located at the journal bearings and the gear mesh only. Nikolajsen and Botman 13 presented a dynamic analysis of journal bearing which supports the planets of an epicyclic gear stage. The characteristics of journal bearing are developed with a fairly simple expression based on the short bearing assumption. Bu et al. 14 investigated the free vibration characterization, natural characteristics and modal analysis of DH planetary gear train supported by journal bearings. The supporting force of journal bearing is described by four stiffness coefficients in the analysis, and it was found that dramatic change of mode shape for translational mode occurs when the asymmetric interaction exists in journal bearings. Cui et al. 15 investigated the effect of oil film force on a geared rotor system with a short journal bearing model to represent nonlinear oil film force, and they found that oil film force has an important impact on the nonlinear mesh force and vibration characteristics of gear system. Gao and Zhang 16 studied the nonlinear vibration characteristics of geared rotor bearing system and interactions among gears, shafts and plain journal bearings; the nonlinear oil film forces were computed with the short bearing assumption. The results indicated that journal bearings take a dominated effect on the system vibration at higher frequencies.
These published studies on gear dynamics show that journal bearings have a significant effect on the dynamic characteristics of gear system, but the effects of supporting journal bearings are expressed with invariant oil film stiffness and damping coefficients or simplified oil film force model in these studies. In the DH gear system with the dynamic mesh force, the oil film stiffness and damping of journal bearings become time-varying, and influence of the time-varying oil film dynamic coefficients should be considered in the dynamic analysis of DH gear system. Thus, this article presents a theoretical and experimental study to investigate the dynamic behaviour of a DH gear system supported by journal bearings, and the influence of time-varying oil film stiffness and damping coefficients of journal bearings is included.
First, a dynamic model of DH gear system supported by journal bearings is built with time-varying mesh stiffness and damping and time-varying oil film stiffness and damping of journal bearings. The time-varying oil film stiffness and damping are computed with the Reynolds equation for finite-length journal bearings and back propagation (BP) neural network optimized by genetic algorithm (GA). Then, a DH gear system test rig is constructed to conduct a series of experiments under different torque and speed conditions. The dynamic transmission errors of the gear pair are measured with high-precision angle encoders and data acquisition system. Finally, comparisons are made between the theoretical and experimental results.
Test rig
Figure 1 shows the arrangement of this test rig. The test rig consists of the test prototype, the lubrication and cooling system and the measurement system. The test prototype mainly includes the drive motor, the reaction gearbox, the flexible shafts and the test gearbox. The measurement system includes the speed, torque and dynamic transmission error measuring system.

Arrangement of the DH gear–rotor–journal bearing system test rig.
As shown in Figure 2(a), the split coupling is placed on one of the connecting shafts and the torque is applied to the split coupling through a torque arm. Two high-precision angle encoders are connected with the pinion shaft and slave shaft to measure the dynamic transmission error of gear pair in the transverse plane of the gears along the line of action as shown in Figure 2(b). The design parameters of DH gear pair and supporting journal bearings used in the experiment are listed in Table 1.

(a) Test gearbox and torque operating specimen and (b) dynamic transmission error measurement system.
Basic parameters of the DH gear pair and supporting journal bearings.

DH: double-helical.
Theoretical model
Dynamic model of the DH gear system supported by journal bearings
Generally, the rotational inertia of gear is much larger than that of rotor, so lumped parameter method is widely applied to build theoretical model of gear-rotor dynamic system.17,18 With this method, the dynamic model of a DH gear system supported by journal bearings, which is operating in the experiment, is developed in this article. In this model, the frictional forces along the contact interfaces are neglected, while the time-varying mesh stiffness and damping and time-varying oil film stiffness and damping are considered. The discrete dynamic model of the DH gear system supported by journal bearings is shown in Figure 3. Two separate helical gear pairs (one right-side gear pair and one left-side gear pair) are connected to each other through a short shaft, and the short shaft is assumed to have the supporting stiffness and damping connecting the two separate helical gear pairs. Both gear pairs are assumed to connect to each other by a linear gear mesh stiffness and damping in the action plane along the normal direction determined by the helix angle β, shaft position angle Ψ and transverse pressure angle α. The journal bearings are assumed to have time-varying oil film stiffness and damping along the horizontal x-axis and vertical y-axis to support the shafts.

Three-dimensional dynamic model of a DH gear pair supported by journal bearings.
DH gear is assembled by two nominally identical helical gears of opposite hand, and the axial force created by one helical gear mesh can be balanced by the axial force of the other in theory, but with the manufacturing errors, the axial force exists in DH gear mesh system actually. Thus, in this article, both gears are allowed to move in x, y and z directions and rotate about z-axis by θ. Then, the motion equations of the right pinion (subscript p1) of the helical gear pair are given as

The motion equations of the right gear (subscript g1) of the helical gear pair are given as

The motion equations of the left pinion (subscript p2) of the helical gear pair are given as

The motion equations of the left gear (subscript g2) of the helical gear pair are given as

And the motion equations of the input plate and output plate are given as

In the above equations, m is the lumped mass, I is the rotational inertia and subscripts p1, p2, g1 and g2 are the codes of gears. Subscripts x, y and z are the coordinate directions; r is the base radius of the gear or shaft; β1 and β2 are the helix angle (β1 = −β2); δ is the relative gear motion along the normal direction and Tin, nin, Tout and nout are the torque and speed of input shaft or output shaft, respectively.
ks and cs are the supporting stiffness and damping, respectively. The supporting stiffness and damping in x and y directions are the oil film stiffness and damping of journal bearings, and they are obtained by the combination of hydrodynamic lubrication theory, neural network model and GA in this article, which is described in the following section in detail. In the experiment, oil leaking from journal bearing flows into the clearance between lateral face of journal bearing and shaft shoulder, and with the motion of shaft in z direction, the oil in the clearance is squeezed. The squeezed oil film can produce supporting stiffness and damping for gear system in z direction. Considering it as squeezed film between two disks and neglecting the misalignment of shaft, the supporting stiffness and damping in z direction can be obtained by the following equations, which are developed by simplification of Reynolds equation 19

where η is the viscosity of lubricant and r1 and r2 are the inner and outer radius of shaft shoulder, respectively;
kb and cb are the bending stiffness and damping of shafts, respectively; kt and ct are the torsional stiffness and damping of shafts, respectively; kbz and cbz are the tensional or compressive stiffness and damping of shafts, respectively; kin, cin, kout and cout are the torsional stiffness and damping of input shaft or output shaft, respectively. The bending, torsional, tensional or compressive stiffness and damping of shafts can be calculated with basic material mechanics theory.
km and cm are the mesh stiffness and damping, respectively. As an important internal excitation for the gear system, the time-varying mesh stiffness can be expressed in the Fourier form as

where kma is the average mesh stiffness of the gear pair, k2j−1 and k2j are the harmonious components of time-varying mesh stiffness and ωm is the mesh frequency. The mesh damping can be calculated by
Equation (1) can be written in matrix form as

where
Neural network model for time-varying oil film stiffness and damping
Most studies used invariant oil film stiffness and damping of journal bearings 14 or simplified oil film force models15,16 to simulate the effect of journal bearings on the gear system. However, the simplifications decrease the analysis accuracy under the dynamic mesh force conditions. Accordingly, a high-precision and high-efficiency model is developed to predict the time-varying oil film stiffness and damping of journal bearings for the dynamic analysis of DH gear system supported by journal bearings in this article. The model combines the hydrodynamic lubrication theory, the neural network technique and the GA.
Generally, the dynamic Reynolds equation for journal bearings in local coordinate can be given as 20
where P is the oil film pressure, H is the oil film thickness, D is the bearing diameter, L is the bearing length, φ represents the angle from the max thickness of the oil film, λ represents the distance from the transverse plane of the journal bearing, θ is the attitude angle and ε is the eccentricity ratio.
Equation (5) can be solved by finite element method to obtain the pressure distribution, and then, the oil film stiffness and damping of journal bearings can be obtained by the following equations

Oil film stiffness and damping of journal bearings in global coordinate system can be given as
The oil film stiffness and damping can be obtained with equations (5)–(7) at some points. To obtain the convergence results of gear dynamics for the dynamic load conditions, the above iteration and calculation process (equations (1)–(7)) needs to be repeated again and again, which will cost a huge amount of time. So, invariant oil film stiffness and damping of journal bearings or simplified oil film force models are widely used in previous studies, but the assumptions in this two methods decrease the accuracy of dynamic analysis of gear systems. Thus, a BP neural network model optimized by GA is developed to accurately and efficiently obtain the time-varying oil film stiffness and damping of journal bearings in this article.
Due to the strong learning ability and simple structure, artificial neural networks are widely used in many fields, such as forecasting and nonlinear multivariate data analysis. 21 BP neural network is composed of input, hidden and output layers, and there are several neural nodes in each layer. The neural nodes in every layer connect with the nodes in adjacent layer by the weights and thresholds. By means of adjusting the weights and thresholds, BP neural network can minimize the errors between prediction results and training samples. However, the BP algorithm will be less effective when the problems are complex or the gradient information is hard to get because it is based on the gradient information of error functions. The GA is a heuristic stochastic search algorithm and a powerful tool for optimization, searching and machine learning. It has good global searching ability. So, the combination of GA and BP neural networks is attracting many attentions. 22 Therefore, the GA is used to optimize the weights and thresholds of the BP neural network to obtain a better prediction results for the oil film stiffness and damping in this article.
The calculation process of GA-BP neural network is given in Figure 4. First, a mass of oil film stiffness and damping results under different structures and operating parameters, which are applied as the training samples for the GA-BP neural network, are calculated by solving the Reynolds equation (equations (5)–(7)). The samples cover the journal bearings with diameters from 40 to 60 mm, lengths from 20 to 60 mm, clearances from 0.04 to 0.12 mm, loads from 100 to 10,000 N, rotating speeds from 100 to 10,000 r/min and temperatures from 40°C to 100°C. Then, a 6-20-15-7 GA-BP neural network (with 6 nodes in the input layer, 20 nodes in the first hidden layer, 15 nodes in the second hidden layer and 7 nodes in the output layer) is established to predict the oil film stiffness and damping of journal bearings.

Calculation process of GA-BP neural network.
The oil film stiffness and damping presented in Someya et al. 20 is calculated with the GA-BP neural network, and the results are given in Table 2. Compared with the results in Someya et al., 20 it can be concluded that the GA-BP neural network model can predict the oil film stiffness and damping efficiently and accurately.
Results comparisons between GA-BP neural network model and Someya et al. 20

GA: genetic algorithm; BP: back propagation.
Results and discussion
The experiments are conducted with different pinion speeds (nin = 1170–2495 r/min) and torques (Tin = 130, 210 and 290 N m). The rotation angles of gears are measured with two high-precision angle encoders connected with the pinion shaft and slave shaft synchronously (see Figure 2). With the measured data and geometric relation of gear pair, the dynamic transmission errors of gear pair can be calculated by the following equations


where δ is the transmission error; the value of subscript i is p or g, which is the symbol of pinion or slave gear; subscript j is the jth time point in sampling time;

where
In theoretical analysis, the dynamic model of DH gear system supported by journal bearings presented in this article is solved with variable-step Runge–Kutta method to predict the dynamics of the gear system operating in the experiment. The predicted results are calculated by two models: one model uses GA-BP neural network developed in this article to provide time-varying oil film stiffness and damping for the dynamic analysis (named time-varying KC model for short), while the other model uses invariant oil film stiffness and damping (named invariant KC model for short). The invariant oil film stiffness and damping applied in invariant KC model are the average of the time-varying oil film stiffness and damping.
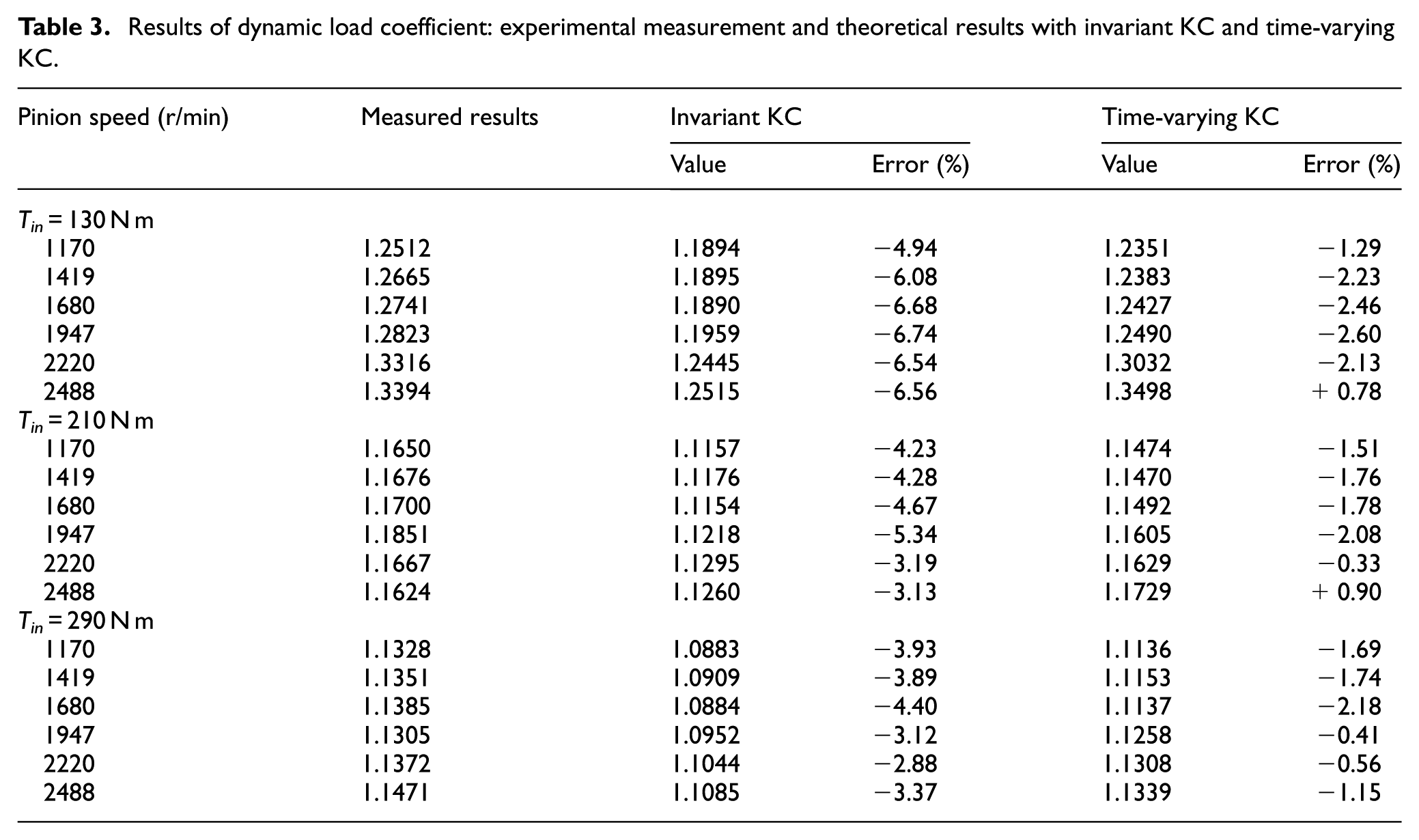
In this article, the dynamic load coefficient is defined as the ratio of the maximum dynamic mesh force (theoretical and experimental results) and nominal mesh force. Table 3 presents the theoretically predicted and experimentally measured dynamic load coefficients of the DH gear system under different operating conditions. It can be seen from Table 3 that the predicted results of time-varying KC model have a better agreement with the measured results than the invariant KC model. The comparison results indicate that the variations in oil film stiffness and damping resulting from the dynamic mesh force should be taken into account in the dynamic analysis of gear system. Besides, the GA-BP neural network model is an effective method to obtain the time-varying oil film stiffness and damping for the dynamic load conditions. More importantly, the dynamic model of the DH gear system including time-varying oil film stiffness and damping of journal bearings can well predict the dynamic characteristics of gear system in actual working conditions.
Results of dynamic load coefficient: experimental measurement and theoretical results with invariant KC and time-varying KC.
To reveal the influence of time-varying oil film stiffness and damping on the dynamic analysis of gear system, the dynamic mesh force, displacement, velocity and acceleration along the line-of-action direction of the experimental DH gear pair are theoretically calculated with the time-varying KC model under several typical operating conditions. The time-varying oil film stiffness and damping of journal bearing supporting pinion shaft and dynamic mesh force of gear pair (the right-side gear pair) under several typical operating conditions are presented in Figure 5. It can be seen that the variations in time-varying oil film stiffness and damping are in accordance with the dynamic mesh force. The reason is that the load applying on the journal bearing is affected by the dynamic mesh force even the gear system is running stably. It means that the supporting journal bearing of gear systems works under a periodic dynamic load condition, so the oil film stiffness and damping become time-varying.

Time-varying oil film stiffness and damping of journal bearing and dynamic mesh force: (a) Tin = 130 N m, nin = 1419 r/min, ωm = 402.1 Hz; (b) Tin = 210 N m, nin = 1947 r/min, ωm = 551.7 Hz; and (c) Tin = 290 N m, nin = 2488 r/min, ωm = 704.9 Hz.
Figures 6–8 compared the theoretical results of dynamic characteristics of the experimental DH gear pair with time-varying KC model and invariant KC model at several typical operating conditions. It is shown that the harmonic components of the dynamic characteristics contain the fundamental harmonics of the excitation and its multiple frequency harmonics (two times, three times or four times). The values of dynamic characteristics in time domain calculated by time-varying KC model are higher than those by invariant KC model, and the harmonic amplitudes are also higher, especially the harmonic amplitudes of 1 times and 3 times. The comparison results shown in these figures reveal that the time-varying oil film stiffness and damping is another important internal excitation for DH gear–rotor–journal bearing system, and again, the effect of journal bearing should be considered in the dynamic analysis of gear systems.

Theoretical results of the dynamics of the DH gear pair (Tin = 130 N m, nin = 1419 r/min, ωm = 402.1 Hz): (a) time history and (b) FFT spectrum.

Theoretical results of the dynamics of the DH gear pair (Tin = 210 N m, nin = 1947 r/min, ωm = 551.7 Hz): (a) time history and (b) FFT spectrum.

Theoretical results of the dynamics of the DH gear pair (Tin = 290 N m, nin = 2488 r/min, ωm = 704.9 Hz): (a) time history and (b) FFT spectrum.
Conclusion
In this article, the dynamic characteristics of a DH gear system supported by journal bearings are theoretically and experimentally studied. The theoretical investigations are carried out with a bending–torsional–axial coupling dynamic theoretical model for DH gear system. The time-varying oil film stiffness and damping, which are applied to representing the supporting effect of journal bearings, are considered in the theoretical model besides the time-varying mesh stiffness and damping. A BP neural network optimized by GA is developed to predict the time-varying oil film stiffness and damping of journal bearings for the dynamic analysis of DH gear system. A DH gear–rotor–journal bearing system test rig is constructed, and the dynamic transmission errors of gear pairs are measured. And then, the dynamic mesh force, displacement, velocity and acceleration along the line-of-action direction of the DH gear pair are theoretically calculated based on the experimental data. The following conclusions can be obtained from the theoretical and experimental results.
The time-varying oil film stiffness and damping of journal bearings are important internal excitations for gear system supported by journal bearings. The dynamic model for the DH gear–rotor–journal bearing system needs to take time-varying oil film stiffness and damping into account. The model with time-varying oil film stiffness and damping can obtain better results of the gear dynamics than the model with invariant oil film stiffness and damping, and the neural network optimized by GA is an effective way to get the time-varying oil film stiffness and damping for dynamic analysis of gear systems supported by journal bearings.
Footnotes
Academic Editor: Fakher Chaari
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 51505384), the Aeronautical Science Foundation of China (Grant No. 20140453008) and Fundamental Research Foundation for the Central Universities of NWPU (Grant No. 3102015JCS05007).