
Abstract
There are two difficulties in the remaining useful life prediction of rolling bearings. First, the vibration signals are always interfered by noise signals. Second, some of the extracted features include useless information which may decrease the prediction accuracy. In order to solve the problems above, corresponding methods are employed in this article. First, adaptive sparsest narrow-band decomposition is utilized for extracting the degradation information from noise. Compared with the commonly used empirical mode decomposition method, problems including mode mixture and boundary effect caused by the calculation of extremas is not required. Second, locality-preserving projection is applied for merging the meaningful information from the original data and reduces the dimension of features. Based on adaptive sparsest narrow-band decomposition and locality preserving projection, a novel approach is employed for the remaining useful life prediction. The prediction procedure is as follows. First, the signals are analyzed by adaptive sparsest narrow-band decomposition and the feature vectors are constructed. Afterwards, the features are fused by locality preserving projection to merge useful information from the features. Least squares support vector machine is applied for the remaining useful life prediction in the end. The analysis results indicate that the proposed approach is reliable for rolling bearing remaining useful life prediction.
Keywords
Introduction
As rolling bearing fault has become one of the most frequently happened reason in the failure of mechanical systems, research on the prediction of remaining useful life (RUL) has become a hotspot in case-dependent maintenance.1–11 The RUL prognostic methods can be divided into model-based approaches1–4 and data-based approaches.5–9 In model-based approaches, the forecasting problem is solved by mathematical equations. Based on the propagation theory of rolling bearing, an approach for operating state prognosis of rolling bearings was proposed by Marble and Morton. 1 Liao et al. 2 introduced a RUL forecasting approach using logistic or hazard regression models. A proportional hazard model was introduced by Tian and Liao 3 for the RUL prediction. Model-based approaches can predict the RUL prediction accurately if properly applied. The dynamic procedure and fault spread of mechanical systems are complicated. Thus, it is very hard to construct the model.
In data-based approaches, the data sets obtained from various conditions and appropriate signal processing methods are utilized. Data-based approaches are more appropriate for complicated situations as the equations and the physical laws of rolling bearing do not have to be considered. Gebraeel et al. 4 developed an approach for the RUL prediction of bearings using neural network. Maio et al. 5 developed an approach using relevance vector machine for the estimation of RUL. Ali et al. 6 introduced an approach by applying Weibull distribution.
In the data-driven methods, empirical mode decomposition (EMD) is pervasively used to reduce the fluctuation for feature extraction on the degradation trend of bearings.7–9 As it has shown a better performance in analyzing simulation and experimental signals than EMD, 12 adaptive sparsest narrow-band decomposition (ASNBD) algorithm is introduced to extract feature.
The ASNBD algorithm was proposed by combining the theory of matching pursuit (MP)13–15 and EMD.16–19 It has shown a good performance in analyzing mechanical vibration signals. In ASNBD, the sparsest decomposition of a complex signal is gained by limiting the components as local narrow-band (LNB). 20 A designed filter must be optimized in ASNBD at first. The optimization objective function is set to be a differential operator 20 to constrain the components as LNB signals. The complex signals are smoothed by applying the optimal filter to obtain LNB component.
The decomposition results are with physical meaning in ASNBD, which is similar to EMD. Nevertheless, in the decomposition process, optimization problems are solved in ASNBD to replace the interpolation function in EMD. Therefore, the drawbacks including mode mixture and boundary effect in EMD which are caused by the application of interpolation function are alleviated in ASNBD. The similarity between MP and ASNBD is that the sparsest decomposition results are both obtained by solving optimization problems. However, a redundant dictionary should be constructed in MP before it is applied, which is not necessary in ASNBD. So that ASNBD shows a better performance in adaptivity. Otherwise, the analysis results of ASNBD possess more explicit meaning.
It is noted that not all the information in the extracted features are beneficial to the rolling bearing RUL prediction. Therefore, appropriate techniques should be utilized to merge the useful information from the extracted features and reduce the dimension of features. Many advanced algorithms containing principal component analysis (PCA), 21 linear discriminant analysis, 22 locally linear embedding, 23 and kernel PCA 24 have been proposed to achieve that goal. Locality preserving projections (LPPs) 25 was developed by He et al. 25 It can generate linear projective map that possesses the intrinsic information of the signals in a lower dimensional space. As LPP has been proven to be beneficial for mechanical vibration signal analysis in many articles,26–28 it is applied to fuse the features obtained from the experimental data sets in the proposed method.
The process of the RUL prediction is as follows. First, each collected data is decomposed by ASNBD, and some statistical parameters of each signal are calculated. Afterwards, the features are fused by applying LPP, and least squares support vector machine (LS-SVM)10,11 is applied for RUL prediction.
The remaining contents are as follows. The relevant approaches and the process of the proposed approach are given out in section “Methodology.” The validity of the proposed approach is tested in section “Experimental analysis.” In section “Conclusion,” the conclusions and discussions are given.
Methodology
ASNBD method
Mechanical vibration model
Impulses are produced while a rolling bearing strikes with another one. 29 The collected vibration data are periodically modulated by the impulses. The vibration model is as follows 30

where
The

where
From the model in equation (2), it can be found that a vibration signal has two parts: the useful part which contains the fault information and the useless part which contains the noise information. Thusly, the process of extracting useful information from the vibration signal can be considered as the process of separating the periodic modulation signal
Intrinsic narrow-band component
A narrow-band signal is commonly expressed to be
For a signal, if any neighborhood interval is close to be narrow-band, then it is an LNB signal. 20 Moreover, if the decomposed components satisfy the definition of LNB signal, they are defined as intrinsic narrowband components (INBCs).
Singular local linear operator
For a singular linear operator, if any neighborhood

where
The singular local linear operator T introduced by Peng et al. is as follows

It can be easily inferred that for an LNB
ASNBD scheme
ASNBD searches for the sparsest decomposition by solving optimization problems in ASNBD. Assume there is a complex signal
1. Make
2.

The differential operator T is defined in equation (4), which is applied to constrain
3. Set
4. Stop the iteration process if
In P1 of equation (5), all the data points in
1. Obtain the fast Fourier transformation of the original signal
2. A nonlinear filter

3. Solve

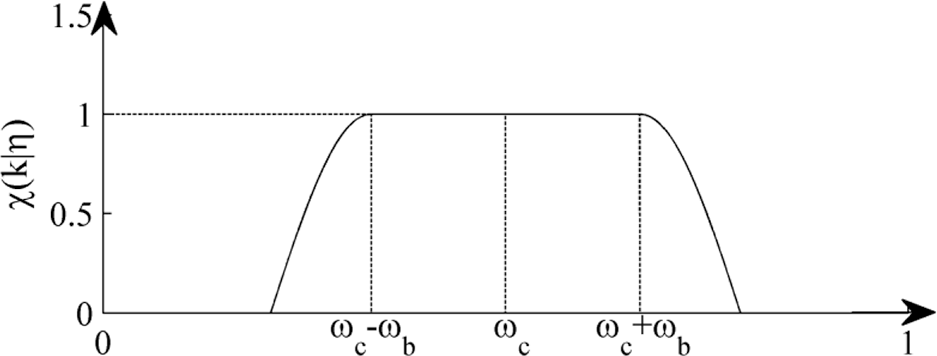
The filter given in equation (6).
The parameter vector
4. Set
Figure 2 illustrates the ASNBD procedure. The optimization problem P1 in the original algorithm is replaced with the optimization P2 of the parameter vector

The flow chart of ASNBD.
Cyclostationary signal analysis
As vibration signals of rolling bearings are cyclostationary signals in essence.
31
To verify the validity of ASNBD method, two cyclostationary signals are applied in this section. The signals are handled by both EMD and ASNBD for the purpose of comparison. First, a cyclostationary signal

where

The time-domain waveforms of simulation signal x(t) in equation (8) and its components.
The decomposed components of

The decomposition results generated by ASNBD.

The decomposition results generated by EMD.
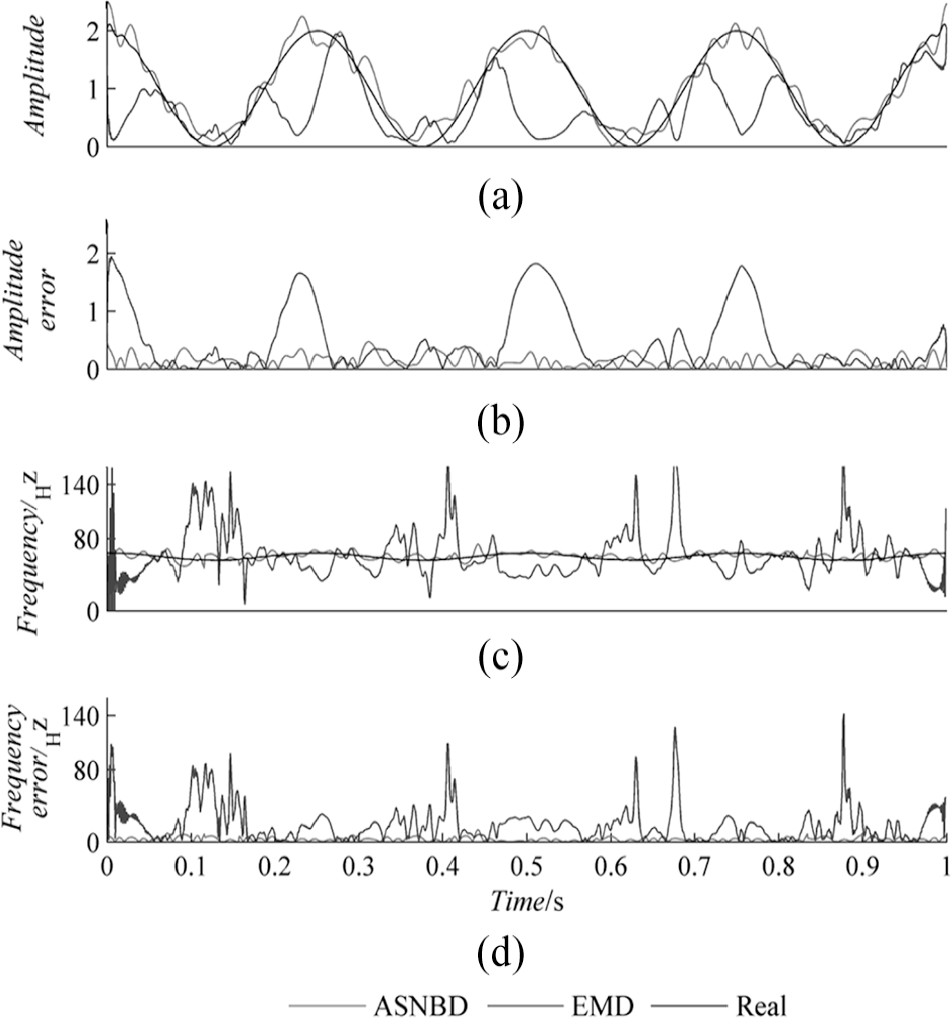
The IAs and IFs and their absolute errors between real values: (a) the IAs of INBC1 and IMF2, (b) the absolute errors of the IAs of INBC1 and IMF2, (c) the IFs of INBC1 and IMF2, and (d) the absolute errors of the IFs of INBC1 and IMF2.
For further comparison, the parameters such as energy error



In equations (9)–(11),
The calculated parameters in Table 1 show that INBC1 is closer to the real component
Evaluating parameters of the components of x(t) generated by ASNBD and EMD.

ASNBD: adaptive sparsest narrow-band decomposition; EMD: empirical mode decomposition; INBC: intrinsic narrowband components; IMF: intrinsic mode function; IO: index of orthogonality.
Furthermore, a more complicated cyclostationary signal is considered

In the cyclostationary signal

The time-domain waveforms of simulation signal y(t) in equation (12) and its components.

The decomposition results generated by ASNBD.

The decomposition results generated by EMD.

IAs and IFs and their absolute errors between real values: (a) the IAs of INBC1 and IMF3, (b) the absolute errors of the IAs of INBC1 and IMF3, (c) the IFs of INBC1 and IMF3, and (d) the absolute errors of the IFs of INBC1 and IMF3.
Evaluating parameters of the components of y(t) generated by ASNBD and EMD.

ASNBD: adaptive sparsest narrow-band decomposition; EMD: empirical mode decomposition; INBC: intrinsic narrowband components; IMF: intrinsic mode function; IO: index of orthogonality.
It can be concluded that when
Statistical parameters
After the vibration data sets are decomposed by ASNBD, statistical parameters should be calculated to extract the features. Table 3 shows some common features. For the convenience of calculating, the parameters are all normalized. More details about the statistical parameters can be found in Zeng et al. 32 As the generated components with high frequency are usually generated first and bearing fault information often exists in the high-frequency bands, the first several INBCs are selected in practical applications. 32
Statistical parameters.

LPP method
After the statistical parameters are obtained from the vibration signals of rolling bearings, an M dimensional feature vector can be constructed. However, the generated feature vector always includes superfluous information and is high dimensional. Thus, appropriate technique should be applied to extract effective information and decrease the dimension of the features. The PCA is the most common method for the dimensionality reduction in the RUL prediction.21,33 The PCA is meant for gaining the global information of Euclidean space and short of the ability of preserving the global structure.21,33 To avoid that disadvantage, LPP method, which can discover local information of the collected data, is applied in this article.26–28
The LPP preserves a local structure by extracting a linear approximation of the original feature. Assume

The weight S is gained by the nearest-neighbor graph and incurs a penalty when the neighboring points

where k expresses the “locality” of the local neighborhood and

where D

The optimization problem is as follows

The constricted optimization objective operator can be changed into a generalized eigenvalue problem by applying Lagrange multiplier approach. Thus, the following transformation matrix is obtained

where

where A is a
PCA is utilized for extracting the subspace to maximize variance, thus it can preserve the global structure. Nevertheless, the information in the local structure of real-world data sets such as mechanical vibration signals is more important. Besides, LPP has been proved to be suitable for processing the vibration signals of rolling bearings. Meanwhile, comparisons has been made between LPP and PCA by applying vibration signals, and the results has shown that PCA is superior in extracting useful information from the original feature vectors.26–28 Thusly, LPP method, which can preserve the local information of data sets, is applied in the propose method for the dimensionality reduction.
Least squares support vector machine
The LS-SVM is the modified algorithm of SVM, which is proposed for dealing with nonlinear and high-dimensional occasions. The LS-SVM procedure is as follows.10,11
For a data set

where w is the weight value; b is the bias value. The optimization problem J is constructed as follows


Equation (21) is the object function and equation (22) is the constraint, C is a regulation value, and

Obtain the first-order differentiation of equation (23)
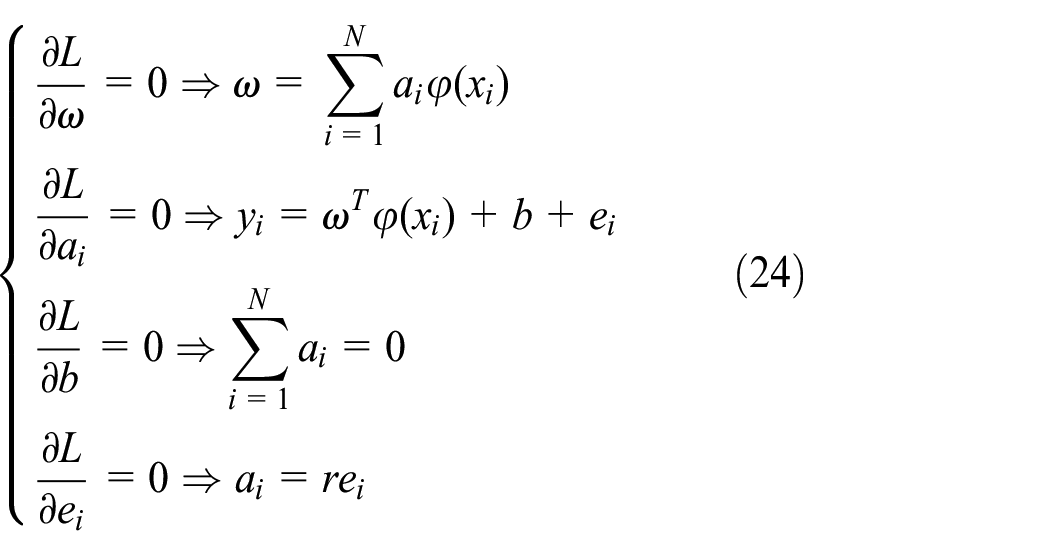
After the parameters

where

The proposed method
An approach for RUL prognosis is introduced based on ASNBD and LPP. The flow chart is illustrated as Figure 11. The process of the approach is as follows:
The collected RUL signals are separated using ASNBD; the M first extracted INBCs are employed.
The statistical features of the INBCs are calculated. As the M first extracted INBCs are applied, the feature vectors’ number F is
The features are fused by LPP method to lower the dimension of the features and merge useful information. Then the fused feature is normalized.
The LS-SVM classifier is applied for testing and training; output the predicted RUL results of rolling bearing.

The flow chart of the method proposed in section “Least squares support vector machine.”
Experimental analysis
The collected experimental signals are from the Center for Intelligent Maintenance Systems (IMS) of Cincinnati University.34–36 The type of the used bearings is Rexnord ZA-2115. In every row of the bearings, there are 16 rollers. The PCB 353B33 ICP accelerometers with high sensitivity are set on the bearing house. The test rig is shown in Figure 12. Four bearings are applied for testing in the experiment. The radial load is set to 6000 lbs and the rotation speed is set to 2000 r/min. The experiment lasted 35 days to obtain the whole life data of the bearings.

Bearing test rig.
The signals are collected in 10 min. The sample frequency is set to 20 kHz. The experiment repeated three times, and all the four bearings are considered. Therefore, 12 data sets are collected in the whole experiment. However, only three bearings are failed in the test, which means corresponding three data sets can be seen as whole life data. The details of the three whole life experimental signals are illustrated in Table 4. For convenience, the signals are denoted as 1, 2, and 3, and the time domain curves are shown in Figure 13.
Information of the experimental data sets.


Vibration signals of all the data sets: (a), (b), and (c) are the vibration signals of data set 1, 2, and 3, respectively.
First, LPP and PCA are applied to lower the dimension and extract useful information to testify the effectiveness of LPP. The eigenvectors of original data sets are all fused to be one-dimensional eigenvectors. The fused eigenvectors of the three data sets are illustrated in Figures 14–16. The fused features obtained using the LPP show better similarity with time and the curves have obviously less fluctuation compared with PCA.

Eigenvectors fused by LPP and PCA of data set 1: (a) and (b) are the fused eigenvectors generated by LPP and PCA, respectively.

Eigenvectors fused by LPP and PCA of data set 2: (a) and (b) are the fused eigenvectors generated by LPP and PCA, respectively.

Eigenvectors fused by LPP and PCA of data set 3: (a) and (b) are the fused eigenvectors generated by LPP and PCA, respectively.
Second, to verify the effectiveness of ASNBD, comparisons are made between the three methods including using the features of the original data sets, the INBCs obtained by ASNBD, and IMFs gained by EMD as the input of LPP. All the data sets are handled by ASNBD. Then the 22 statistical parameters are calculated. As only the first three INBCs are considered, there are 22 × 3 features of the INBCs obtained by ASNBD for testing the effectiveness of ASNBD. The features of the data sets and the first three components obtained using EMD are also calculated to construct the eigenvectors for comparison.
The LS-SVM is applied to fulfill the RUL prognosis process in the end. The 1/3 individual files with uniform interval are applied for testing and the others are used for training.Figures 17–19 show the RUL prognosis results of the three data sets. Life percentage (LP) represents the degeneration degree of the rolling bearing. For example, if the total test time is 2156 min and current time is 200 min, the LP is calculated as 200/2156 (i.e. 9.276%). Figures 17–19 show the predicted results of ASNBD are apparently more similar to the actual values. Otherwise, the fluctuations of the LP curves of ASNBD are smaller. To get a deeper insight about the proposed method, parameters generated by calculating the RUL prediction results are considered in Table 5. CAi, ri, and Ei are the mean classification accuracy, the correlation coefficient and the energy error between the RUL prediction results and the real values of the ith data set, respectively. Ei and ri are defined in equations (9) and (10).

The RUL prediction results of data set 2. (a), (b), and (c) are the predicted LP obtained by applying the original data sets, the decomposed components generated by EMD and ASNBD, respectively.

The RUL prediction results of data set 2. (a), (b), and (c) are the predicted LP obtained by applying the original data sets, the decomposed components generated by EMD and ASNBD, respectively.
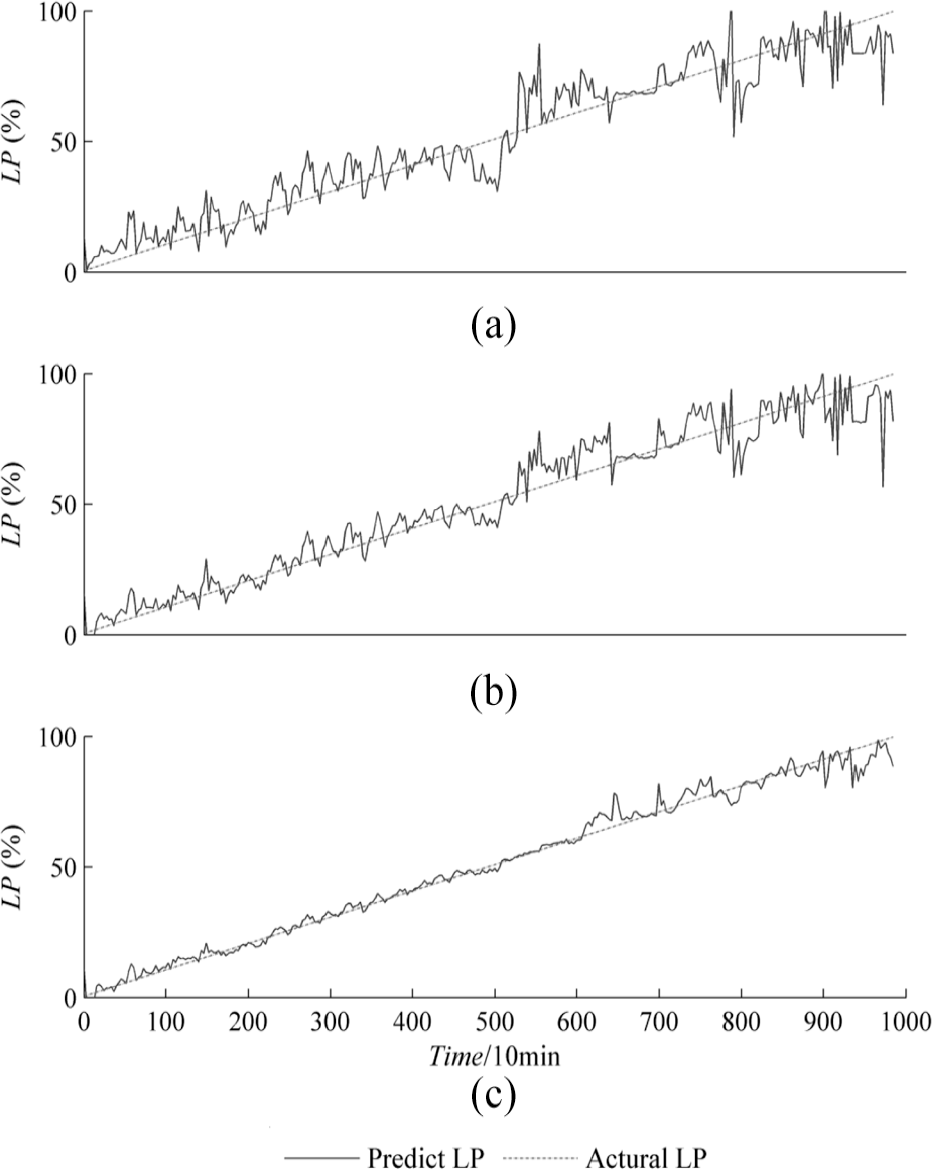
The RUL prediction results of data set 3. (a), (b), and (c) are the predicted LP obtained by applying the original data sets, the decomposed components generated by EMD and ASNBD, respectively.
Evaluating parameters of the RUL prediction results.

RUL: remaining useful life; CA: classification accuracy; EMD: empirical mode decomposition; ASNBD: adaptive sparsest narrow-band decomposition.
In Table 5, it can be inferred that the RUL prediction accuracies generated by utilizing ASNBD are superior. And the proposed method is performed better in the analysis of experimental data sets. Compared with EMD, ASNBD is more effective in extracting useful information from non-linear vibration data sets. Thusly, it can be inferred that the RUL prognosis approach based on ASNBD and LPP shows a superior performance in the RUL prediction.
Conclusion
A new method for the RUL prediction of bearing is proposed based on ASNBD and LPP. Each data is decomposed by ASNBD and the features are derived by calculating statistical parameters from the generated INBCs. Then the feature vectors are fused by LPP to merge useful information and lower the dimension of the features. The LS-SVM is employed to fulfill the RUL prediction process at last. The experimental analysis results show that compared with EMD, ASNBD is more effective in extracting useful information from the vibration data sets and shows a more reliable performance. This method can also be used for the prediction of other mechanical assets.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China (grant no. 2018YFF0212902), National Natural Science Foundation of China (grant nos 51805161, 51475159, and 51575178), Hunan Provincial Key Research and Development Program (grant no. 2018GK2044), Hunan Provincial Natural Science Foundation of China (grant nos 2018JJ3187, 2017JJ1015, 2017JJ2086, and 2018JJ4084).