
Abstract
In this article, the free vibration characteristics of spherical caps with different thickness distribution subjected to general boundary conditions are investigated using a semi-analytical approach. Based on the theory of thin shell, the theoretical model of spherical cap is established. Spherical caps are partitioned into sections along the meridional orientation. The displacement components of spherical caps along the meridional direction are represented by Jacobi polynomials. Meanwhile, Fourier series are utilized to express displacement components in the circumferential direction. Various boundary conditions can be easily achieved by the penalty method of the spring stiffness technique. The vibration characteristics of spherical caps are derived by means of the Rayleigh–Ritz energy method. Reliability and validity of the current method are verified by convergence studies and numerical verification. The comparison of results between the current method, finite element method, and those published in the literature prove that the current method works well when handling free vibration of spherical caps. More results of spherical caps with different geometric specifications and edge conditions are displayed in the form of table and graphic, which may serve as a reference for future studies.
Keywords
Introduction
Spherical caps with uniform and stepped thickness have been widely applied in practical engineering applications for their excellent mechanical properties. Spherical caps usually subject to a variety of dynamic loads which lead to the excessive vibration. Thus, the vibration characteristics of spherical caps have been well attracted by scholars around the world. The related literature is reviewed below.
On the basis of a semi-analytical method, Artioli and Viola 1 investigated the vibration behavior of spherical shells. Lee 2 investigated the vibration of a spherical cap by means of the pseudospectral method. He represented the displacement function by Chebyshev polynomials, and the rotations are expressed as Fourier series. Liew et al. 3 studied elasticity solutions for the free vibration analysis of curved shell panels on the basis of three-dimensional (3D) displacement-based energy formulation and the Ritz method. Hosseini-Hashemi and Fadaee 4 proposed a novel solution to investigate the vibration characteristics of a spherical shell. The adaptability and exactness of the method were verified by the results published in the literature and 3D finite element analysis. Pang and colleagues5–8 used a semi-analytical method to analyze free vibration characteristics of single and combined shells of revolution. Ye et al.9,10 investigated the vibration behaviors of functionally graded (FG) and composite laminated spherical shells with arbitrary boundary conditions. The results of these papers are compared with those published in the literature and those of the finite element method (FEM). Tessler and Spiridigliozzi 11 put forward a new simple shell element of two nodes on the basis of shallow curved meridional assumptions. The new element has better adaptability for element slenderness and curvature properties. Chen et al. 12 presented an analytical method for analyzing the free and forced vibration characteristics of a ring-reinforced conical cylindrical shell with arbitrary boundary conditions, where the stiffener with a rectangular cross section is treated as a separate member and the equation of motion of the annular plate is used to describe the movement of the stiffener. Jin et al. 13 and Su et al. 14 proposed a modified Fourier series solution and a 3D vibration analysis approach to investigate the vibration property of truncated curved cases with complex boundary edges. Kiani et al.15–18 investigated static, dynamic, and free vibration analyses of a functionally graded material (FGM) curved panel by means of Hamilton’s principle and the conventional Ritz formulation.
To the authors’ knowledge, there are also a few studies on spherical shells and plates with stepped thickness. Juárez 19 applied the classical uniform plate solution to each zone of different thickness to obtain the frequency and dynamic curve of stepped circular plates. Poultangari and Nikkhahbahrami 20 solved the dynamic behavior of stepped cylindrical shells by combining the wave method and the Fourier series method. Li et al.21,22 analyzed stepped cylindrical and spherical shells with general boundary conditions using the semi-analytical approach. Khalifa 23 investigated the vibration behavior of stepped cylindrical shells by means of the combination of the transfer matrix approach and the Romberg integration method. Based on the theory of thin shell, Zhang and Xiang 24 studied the vibration characteristic of stepped cylindrical shells. Ju et al. 25 studied the vibration behavior of plates with stepped variations in thickness by means of the FEM. Li et al.26,27 studied the free vibration of FG shells of revolution with non-uniform thickness distributions.
Most studies mentioned above are about the investigation of the vibration characteristic of uniform spherical shells by means of the pseudospectral method, FEM, Fourier series method, and so on. There are only a few studies on the vibration behavior of spherical shells with stepped thickness. Thus, a unified and efficient formulation is necessary and of great significance to establish to analyze free vibration of spherical caps with uniform and stepped thickness subjected to various boundary conditions.
Theoretical formulations
Description of the model
The geometric notation and coordinate system of spherical caps with uniform and stepped thickness are, respectively, displayed in Figure 1(a) and (b). In the cross section of the uniform and stepped spherical caps, thicknesses are, respectively, denoted by h and hi. The symbols R and Rs signify the horizontal radius and radius separately. Cs implies the center of the spherical cap and
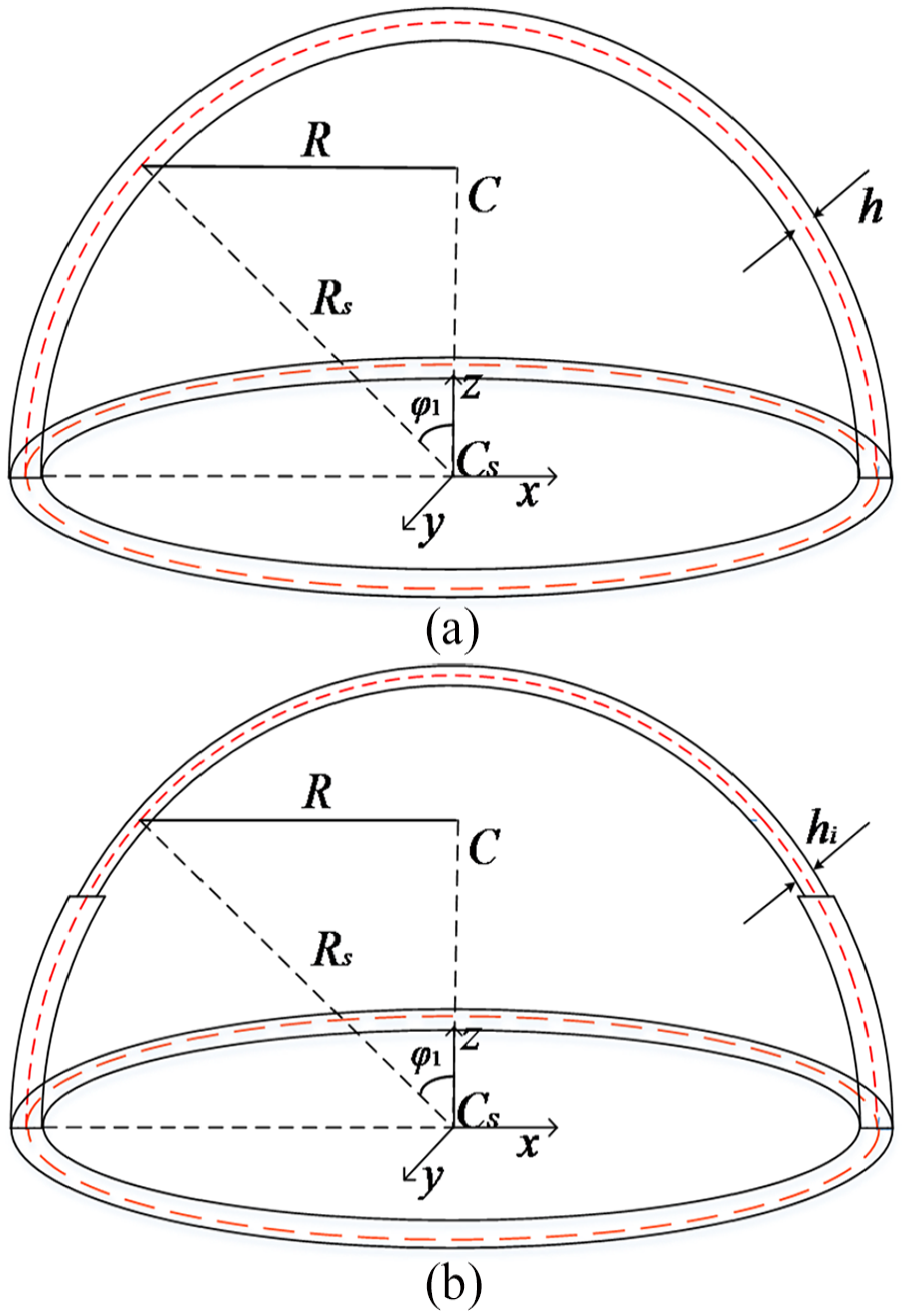
Geometric characteristic symbols of (a) uniform thickness spherical cap and (b) stepped thickness spherical cap.

(a) System of coordinates and (b) differential element of the spherical cap.
Energy functional expressions of the spherical cap
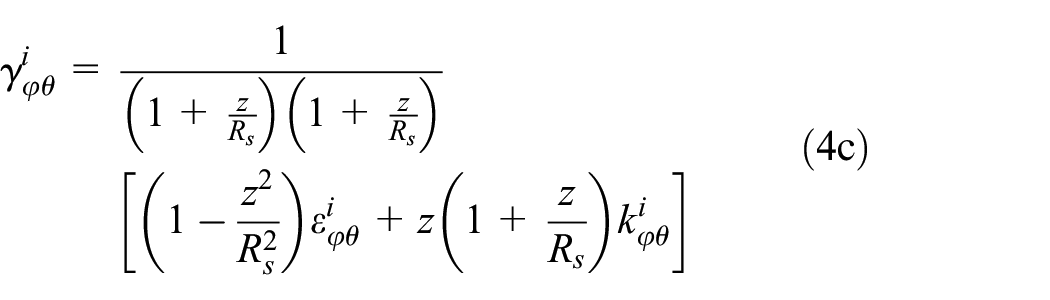
The relationship between strain and displacement of the ith section of the spherical cap is expressed as follows on the basis of the theory of thin shell and Kirchhoff hypothesis






where i signifies the ith segment of the spherical cap;

The linear strains of the spherical cap based on Flügge’s thin shell theory can be written as


where

where



where E and μ, respectively, denote the elastic modulus and Poisson’s ratio. The strain energy stored in the spherical cap during elastic deformation is expressed as

where dV denotes the volume of the element, which can be expressed as follows

By combining equations (7) and (8), the energy function of the spherical cap is rearranged as follows

where



The kinetic energy of the spherical cap can be defined as

The dot above the displacement component represents the differentiation of displacement with respect to time. The kinetic energy expression of equation (11) can be re-represented as

where ω is the angular frequency of the spherical cap.
Boundary conditions and continuity constraints of the spherical cap
In this research, the boundary conditions and continuity of spherical caps are modeled using the penalty method, where the penalty parameters are translational and rotational spring stiffness values. That is to say, various boundary conditions can be simulated by setting proper values to penalty parameters.
The potential energy stored in the boundary springs of the spherical cap can be expressed as
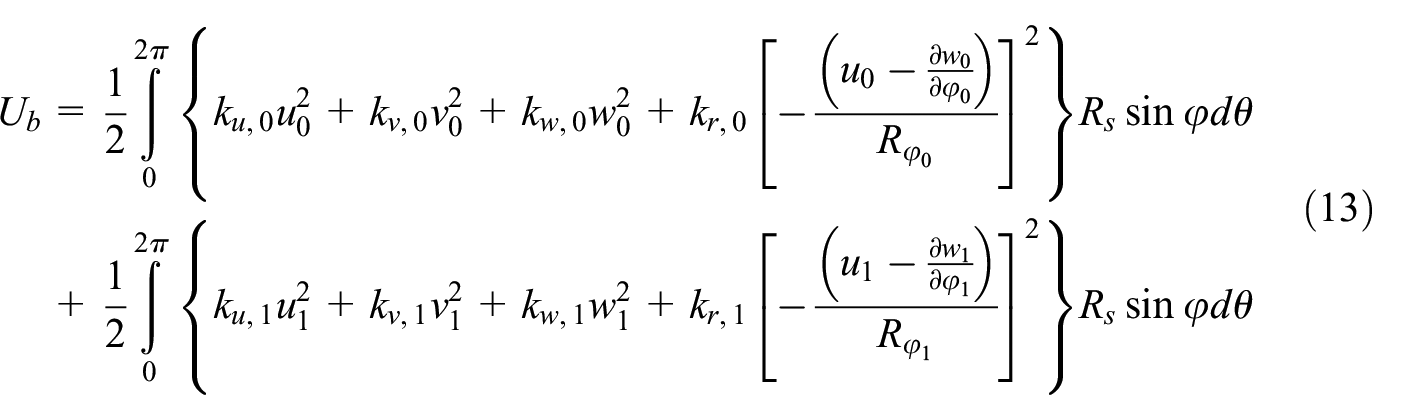
where

Finally, the total potential energy stored in the boundary and connective springs is expressed as

where Np is the number of sections of the spherical cap divided along the axial direction. Various boundary conditions can be easily simulated in this research by setting the boundary and connective spring stiffness at proper values.
Displacement components and the solution process
The choice of the suitable displacement function plays an important role when guaranteeing the accuracy of the solution. The use of the penalty method in this research makes the choice of the displacement function flexible.
In this research, the displacement and rotational components of the spherical cap are, respectively, expressed as Jacobi polynomials and Fourier series, regardless of boundary conditions. As displayed in the published literature, conventional Jacobi polynomials28,29 are limited in the range of



In the equations above,



In the equations above,

The total energy function of the spherical cap is minimized with regard to the undetermined Jacobi coefficients on the basis of the Rayleigh–Ritz method

By substituting equations (12), (15), (17), and (18) into equation (19), the discretized equation of vibration is summarized in a matrix form as follows

where K and M, respectively, signify the stiffness matrix and mass matrix and T is the vector of unknown Jacobi coefficients. The eigenvalues and the corresponding eigenvectors of equation (20), respectively, match frequencies and mode shapes of the spherical cap.
Numerical results and discussion
In this section, the dependability and validity of this method for uniform and stepped spherical caps are confirmed by comparing with the results reported in the related literature and FEM results. When the penalty parameters are not defined as suitable values, the solution may not converge.30,31 Hence, it is necessary to conduct the convergence study of this method. On the basis of that, more results of spherical caps with different geometry parameters and edge conditions are presented.
To simplify the study, various boundary conditions are represented by symbols. For example, C, SD, SS, F, and E, respectively, denote clamped, shear-diaphragm, shear-support, free, and elastic boundary conditions. Unless otherwise stated, the material constants are set as follows in this research: E = 211 GPa, ρ = 7800 kg/m3, and v = 0.3. To avoid roundoff results, the non-dimensional frequency parameter is used unless otherwise stated:
Convergence studies
Figures 3 and 4, respectively, display the non-dimensional frequency
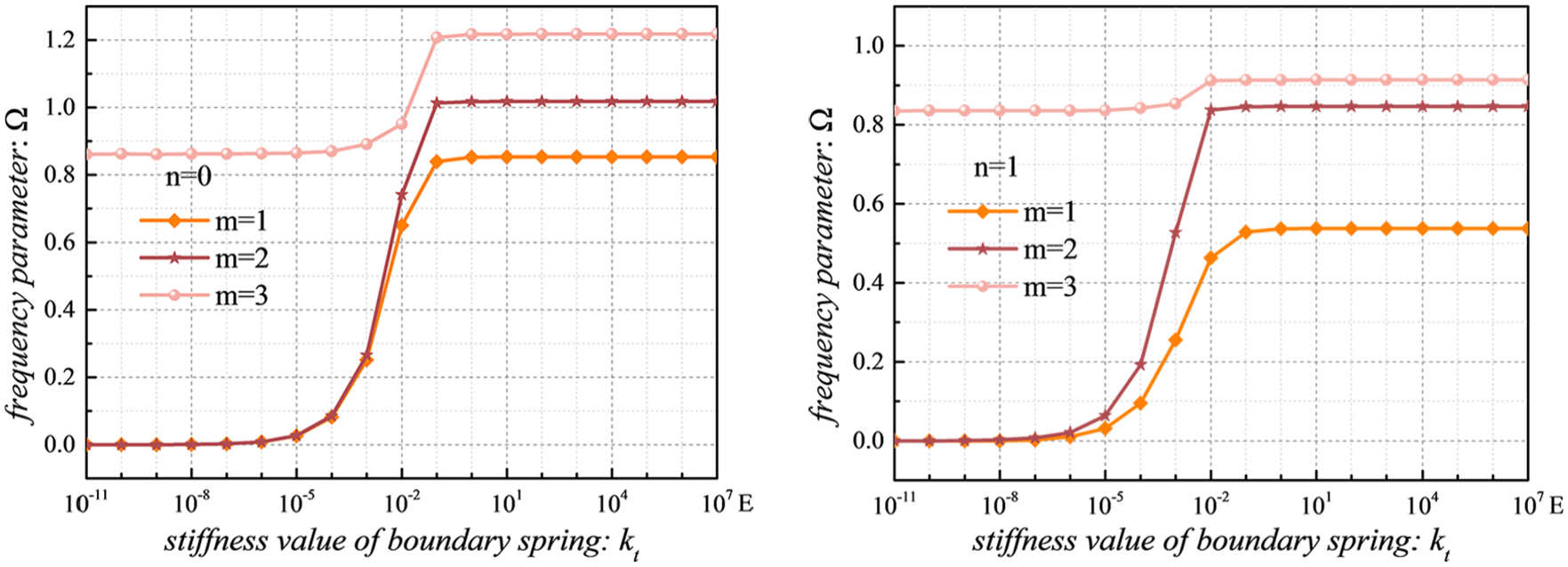
Non-dimensional frequency Ω of the spherical cap with different boundary spring stiffness values.

Non-dimensional frequency Ω of the spherical cap with different connective spring stiffness values.
From Figure 3, it can be observed that that the stiffness values of connective springs in the range of
Spring stiffness values corresponding to various boundary conditions.

Frequency parameters Ω of a uniform spherical cap with different truncation number of segments (Np) are compared with those published in the literature and of FEM in Table 2. The FEM results were obtained by the Abaqus software and the element type is chosen as S4R. To verify mesh convergence of the FEM model, different mesh numbers have been tried. The results demonstrate that when the element number reaches 17,128, the FEM results have been convergent. The comparison of results between the current method, related literature, and FEM proves that the current method converges well when the shell segment number (Np) is small. We can find out that when the shell segment number (Np) of the hemispherical cap reaches 4, the results become convergent. The center angle of the spherical cap in Table 2 is 45 degrees; in addition, the radius and thickness of the spherical cap are, respectively, 1 and 0.05 m.
Convergence study of frequency parameters

FEM: finite element method.
Figure 5 displays the percentage error of frequency parameters of the spherical cap with different Jacobi parameters. The maximum percentage error does not exceed 4 × 10−5 when Jacobi parameters are different. That is to say, Jacobi parameters almost have no effect on the results of the solution. Not only the special polynomials (Chebyshev, Legendre, Bernstein, Gegenbauer) in Jacobi polynomial systems can be used, but other polynomials can also be utilized.

Fractional error of frequency parameters Ω of the uniform spherical cap with different Jacobi parameters (BC: C–C).
Free vibration of uniform and stepped spherical caps
Table 2 proves the fast convergence and efficiency of the current method when handling free vibration of the uniform spherical cap. Meanwhile, the comparison results of the stepped hemispherical cap between the current method and FEM (S4R model, 17,128 elements) are listed in Table 3. The radius of the stepped hemispherical cap in Table 3 is the same as that given in Table 2, whereas the thickness of the top and bottom sections of the hemispherical cap are, respectively, 0.005 and 0.008 m. The slight difference between the comparison results in Table 3 also proves the efficiency and accuracy of the current method when dealing with free vibration of a spherical cap with stepped thickness.
Comparison results of frequency parameters Ω of the hemispherical cap with stepped thickness and various boundary conditions.
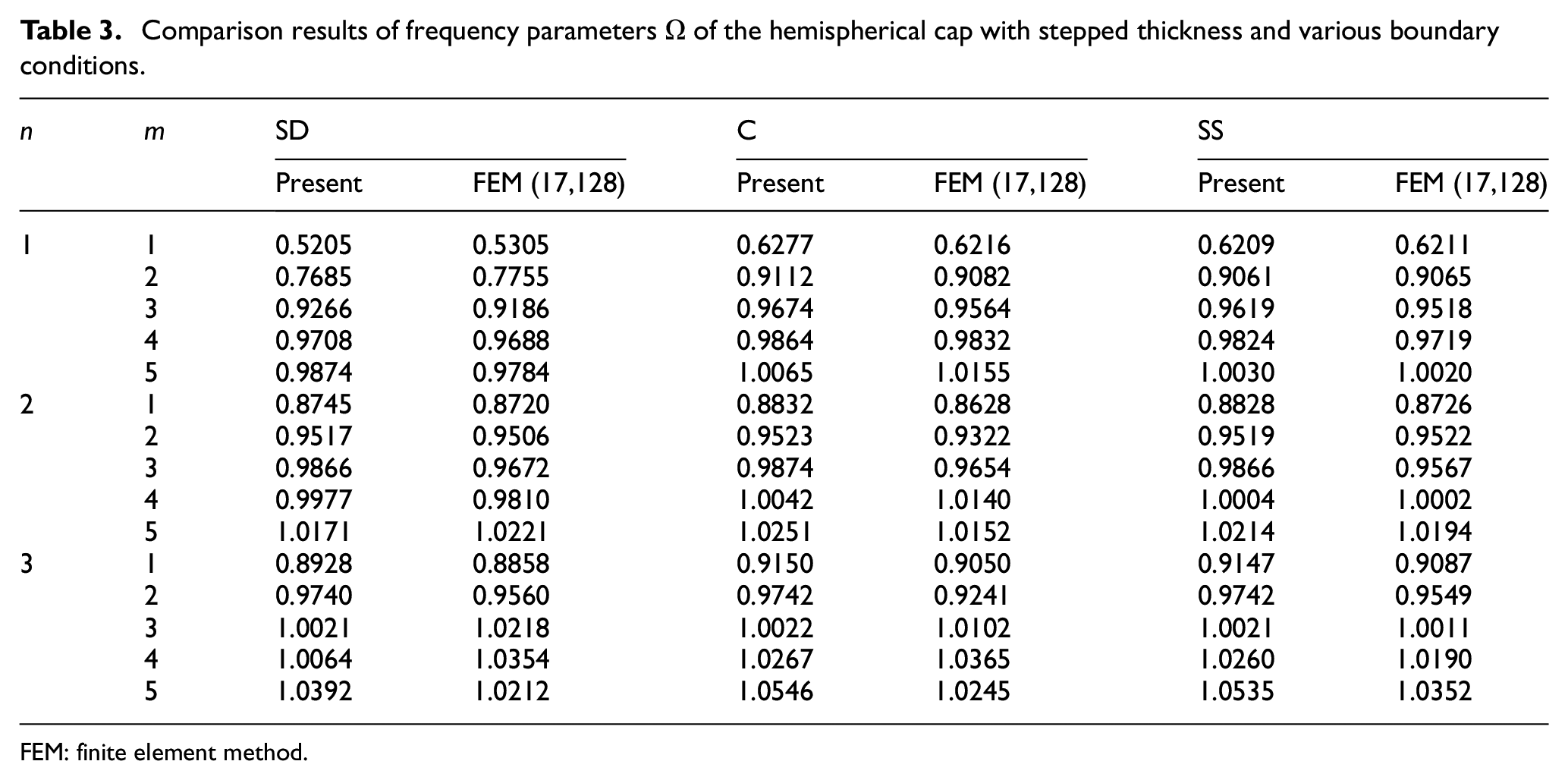
FEM: finite element method.
To further verify the accuracy of the current method, the modal shapes of the spherical cap using the current method and FEM (S4R model, 17,128 elements) are displayed in Figure 6. It is clear that the modal shapes of the current method also match well with the FEM. The high accuracy of the current method is proved again.

Typical mode shapes of the spherical cap with free boundary restraint using FEM and the current method.
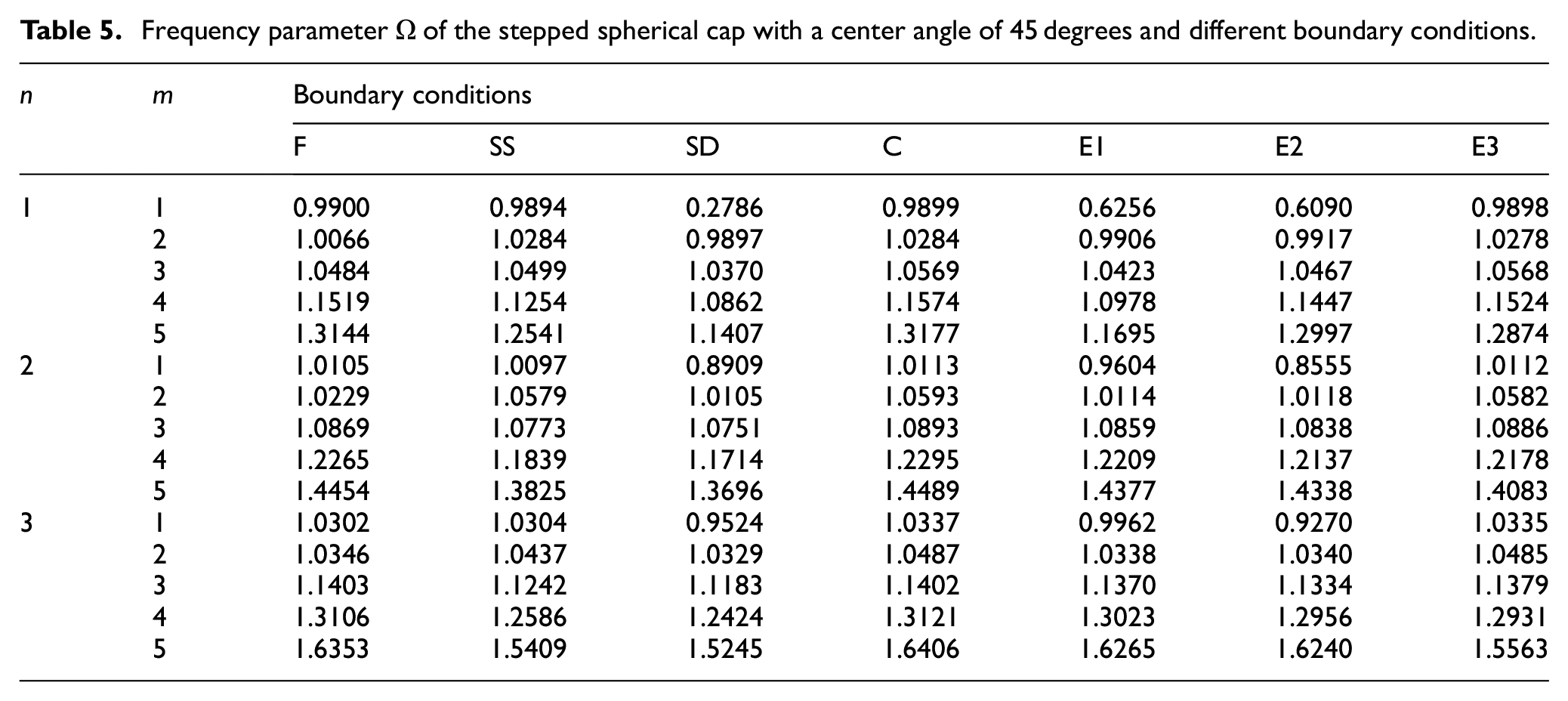
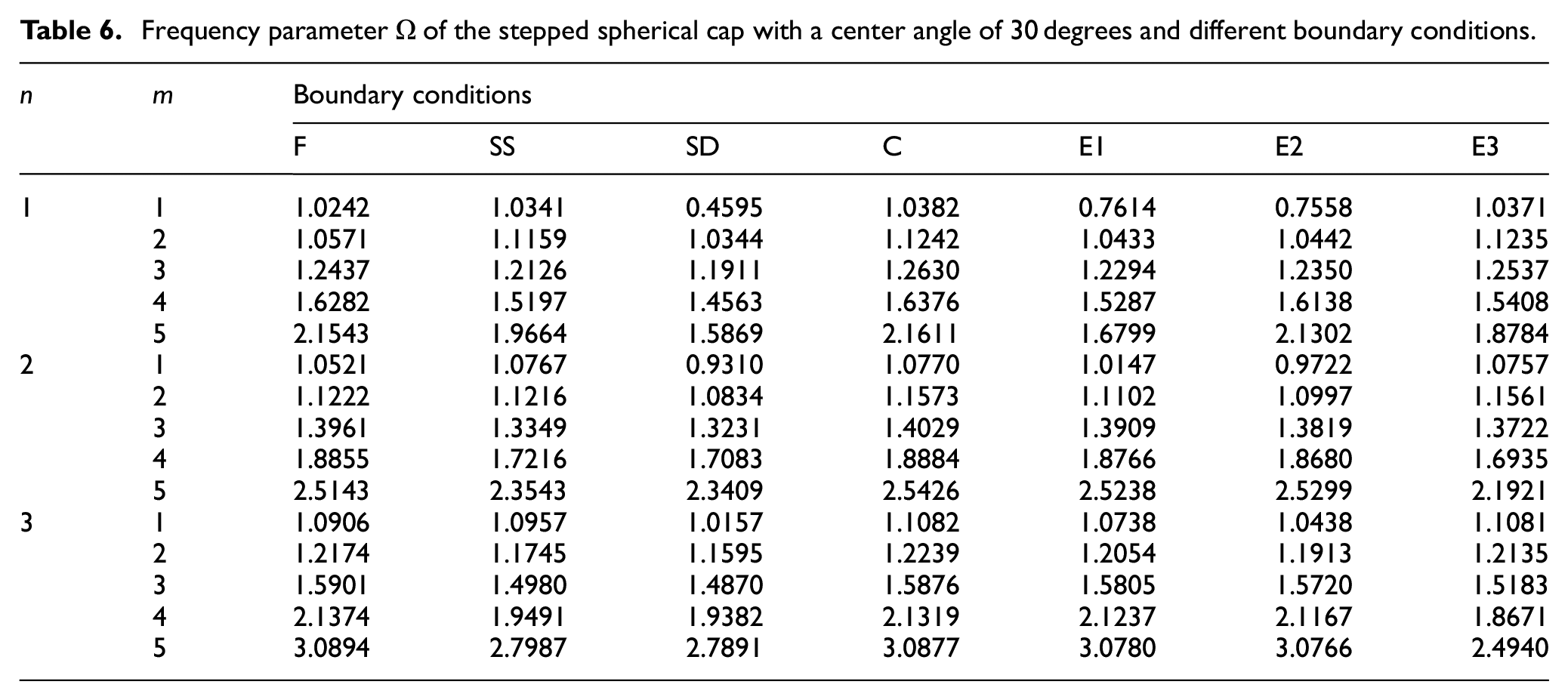
For the shortage of frequency parameters of the stepped spherical cap in the related literature, stepped spherical caps with different center angles and boundary conditions are chosen as research objects in Tables 4–6. The results shown in Tables 4–6 signify that the boundary conditions affect the frequency parameters of the stepped spherical cap heavily. In addition, with the enhancement of boundary conditions, the frequency parameters also increase. Meanwhile, the data in Tables 4–6 prove that when the circumferential mode number is constant, the frequency parameters
Frequency parameter Ω of the stepped spherical cap with a center angle of 60 degrees and different boundary conditions.

Frequency parameter Ω of the stepped spherical cap with a center angle of 45 degrees and different boundary conditions.
Frequency parameter Ω of the stepped spherical cap with a center angle of 30 degrees and different boundary conditions.

Non-dimensional frequency of the uniform spherical shell with various center angles (BC: C–C).
Based on the above study, we can conclude that the current method has the good ability to implement the free vibration analysis of spherical caps with uniform and stepped thickness regardless of the boundary conditions. In addition, the change of the boundary conditions can be easily achieved by only varying the stiffness of the boundary springs along edges in the MATLAB code without making any change to the solution procedure.
Conclusion
A unified Ritz method for free vibration of uniform and stepped spherical caps subject to arbitrary boundary conditions was demonstrated in this research. The spherical cap was divided into sections along the axial direction. The displacement components of the spherical cap were represented by Jacobi polynomials and Fourier series. The classical and elastic boundary conditions can be easily simulated by the penalty method in this research. Generalized Jacobi polynomials ensure the fast convergence, numerical stability, and high accuracy of the current solution. In addition, the unified Jacobi polynomials make the displacement function easier to be selected in contrast with other approaches. The fast convergence, reliability, and accuracy of the current method were validated by comparing with the results published in the literature and the FEM results. Numerical examples of free vibration for a stepped spherical cap with different center angles and various boundary conditions were presented, which may act as a reference for further research.
Footnotes
Appendix 1
Handling Editor: James Baldwin
Data availability statement
The data used to support the findings of this study are included within the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the National Natural Science Foundation of China (Nos 51209052 and 51709063), National Key Research and Development Program (No. 2016YFC0303406), PhD Student Research and Innovation Fund of the Fundamental Research Funds for the Central Universities (No. HEUGIP201801), Fundamental Research Funds for the Central University (Nos HEUCFD1515 and HEUCFM170113), Assembly Advanced Research Fund of China (No. 6140210020105), Naval Pre-research Project, and China Postdoctoral Science Foundation (2014M552661).