
Abstract
In this article, we examine the system control design of a flexible hypersonic vehicle with an unknown direction control. Prescribed performance controls, backstepping controls, and radial basis function neural network are used to design the controllers. Different from a traditional radial basis function neural network, the fully tuned dynamic radial basis function neural network has a better approximation ability; and the weight vector, respective centers, and width of the Gaussian function of neural network are regulated by adaptive laws designed in the controller. The proof and analysis of stability are taken in this article for the fully tuned dynamic neural network introduced to control the system. Furthermore, prescribed performance control can guarantee the tracking errors satisfy the specified conditions. The unknown control direction is solved with the Nussbaum function in the controller. Finally, the simulations demonstrate the effectiveness and corrective measures of the control strategy.
Introduction
An aircraft that has speeds greater than Mach Five is considered to be a hypersonic vehicle. Right now, around the world, there are many scholars who are involved in studying hypersonic vehicles. Designing the control system is considered to be a paramount objective in the technology of the hypersonic vehicle.
The control system design methods of hypersonic vehicles have been researched by a large number of scholars. For example, the
Nonlinear robust control method is used in Wang and Stengel, 6 Parker et al., 7 and Fiorentini et al., 8 but the flexibility issues are not researched in the papers. The adaptive neural network controller is designed in Xu et al. 9 and Wallner and Well, 10 but the approximate errors of the neural network are not solved to impact the tracking effect. The fuzzy logic method is used for the altitude control of X-38 in Wu, 11 while the uncertainties and external disturbance of a hypersonic vehicle are solved to fulfill the altitude control by the robust controller in Marrison and Stengel. 12 In the study of Song et al., 13 the adaptive sliding mode controller is designed based on backstepping to solve the uncertainty in the models, but the external disturbance of the aircraft is not considered. Stabilization control for a hypersonic vehicle with a wave body shape is researched based on the adaptive quadratic form method in Huo et al. 14 Nevertheless, the Taylor linearization model near equilibrium point could not accurately describe the overall dynamic characteristics of the hypersonic vehicle. Although the hypersonic vehicle in Xu et al. 15 with an axisymmetric body shape can be stabilized through the adaptive sliding controller, it cannot solve the mismatch uncertainty. The flexibility issues are considered to be an important factor influencing the stability of aircraft, but are not studied in the above works. Robust adaptive controller in Sigthorsson et al. 4 and an adaptive neural network controller in Wallner and Well 10 and Cheng et al. 16 are designed for a flexible hypersonic vehicle. The controller in Kuipers et al. 17 is designed based on the linear variable parameter control method. Adami and Fiorentini17–21 have researched the flexibility issues of hypersonic vehicle with the adaptive control and the nonlinear robust adaptive control methods. While these papers have considered the flexible modes and increased the size of the system, but while doing so, the controller has been more difficult to operate. In the above works, the stability has been researched without considering the transient performance. In Li et al. 22 and Bu et al., 23 the control system is designed to assure stability and transient performance with the prescribed performance control method, but the unknown control direction issues are not discussed in the works. The direction of motion could not be ascertained when the control coefficient sign and direction are unknown. Drastic changes in the aerodynamic and external conditions are the reasons for the perturbation of the model, and this results in the control direction being difficult to obtain accurately. To implement effective control, the problem of the unknown control direction must be solved. Consequently, the study of the control system, with regard to the control direction, for a flexible hypersonic vehicle is very much necessary, which at this time is rare.
Motivated by the above discussions for a longitudinal dynamic system of a hypersonic vehicle, the inner-loop control system and the outer-loop control system are designed, respectively, in this article. Also, in this article, the unknown control direction issue is solved with the Nussbaum function, and the flexible modes are considered. The uncertainties of the hypersonic vehicle system are approximated online with fully tuned dynamic radial basis function (RBF) neural network being introduced in the control system, specifically. The prescribed performance controllers are devised via backstepping.
Problem formulation and preliminaries
Model description
In this article, the dynamic model taken into consideration is developed by Bolender and Doman in Parker et al. 7 for a flexible hypersonic vehicle. The equations are formulated as follows






where




with





Assumption 1
Assumption 2
In this article, it is assumed that the hypersonic vehicle keeps cruising, and the thrust only comes from a scramjet engine, and thrust vector control is not in the research contents. The effect on
Assumption 3
The effect on aerodynamic force from the rudder is ignored.
Remark 1
The above assumptions are logical in the case of approximation through the analysis of Groves et al., 5 Parker et al., 7 Cheng et al., 16 and Ge and Huang. 24
The model of hypersonic vehicle can also be described as





where
Prescribed performance control
Control objectives are described as follows:
Actual states
The steady and transient performance of the output error
Assumption 4
All order derivatives of the desired command signals are known and are continuously bounded.
Assumption 5
Initial error
Definition 1
A smooth function
To achieve the second control target, the error


with
According to Definition 1, a feasible performance function that satisfies all the previous properties is formulated as

where
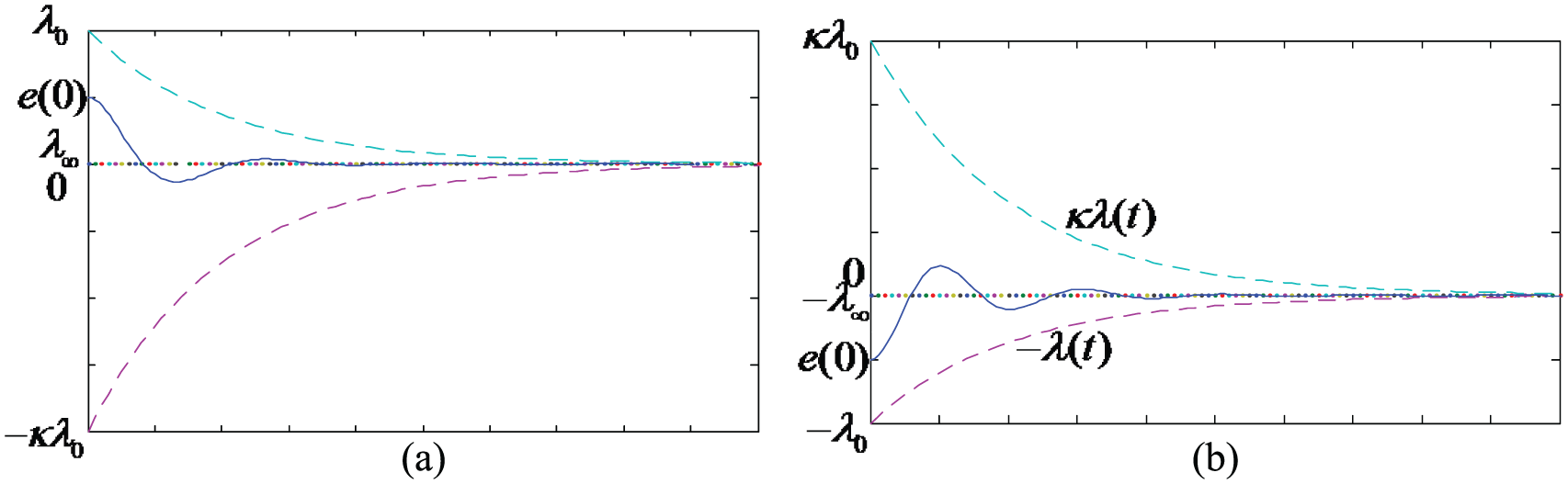
The PPB on the error
Realizing the fact that it is a difficult task to design the controller with equations (21) and (22), we will introduce the error transformation function to transform the original unequal “constrained” systems (21) and (22) into an equivalent one.
The error transformation function is defined as follows

where
Error transformation function



According to above definition, we know that

Remark 2
If
Remark 3
According to Assumption 5, we can devise
Controller design
Inner-loop controller design
Assumption 6
All the states of the system are located in the compact set
Assumption 7
If the control coefficient
Remark 4
According to Assumption 7, control coefficient
Assumption 8
The derivative of control coefficient
Definition 2
If an arbitrary continuous function


then it can be called the Nussbaum function, formulated as
Lemma 1

Lemma 2
Step 1
Define tracking error as

where

with

with
Define the second tracking error as

where
Lemma 3

where

where
According to the above analysis of Lemma 3, it is easy to get that there exist optimal

with
In engineering practice, we cannot get the optimal
with
The

The virtual control law

where
The Lyapunov function is devised as

where
The time derivatives of equation (42) are expressed as
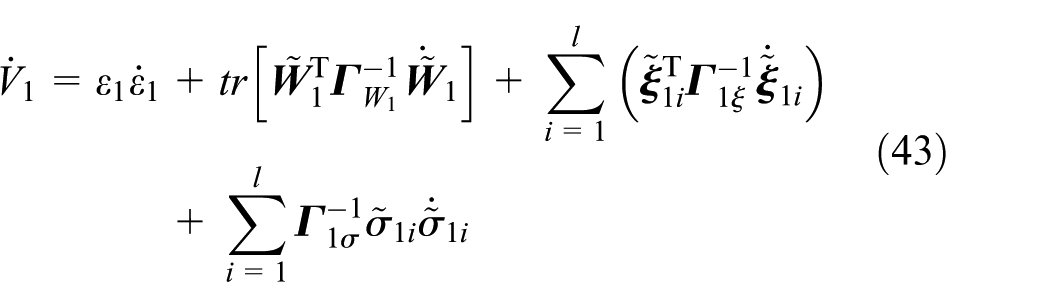
Substituting equation (35) into equation (43) leads to

Assuming

According to

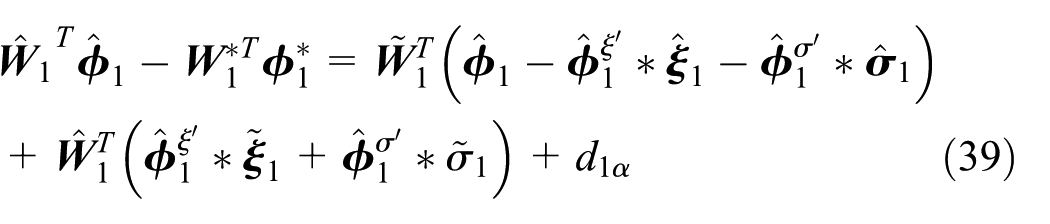
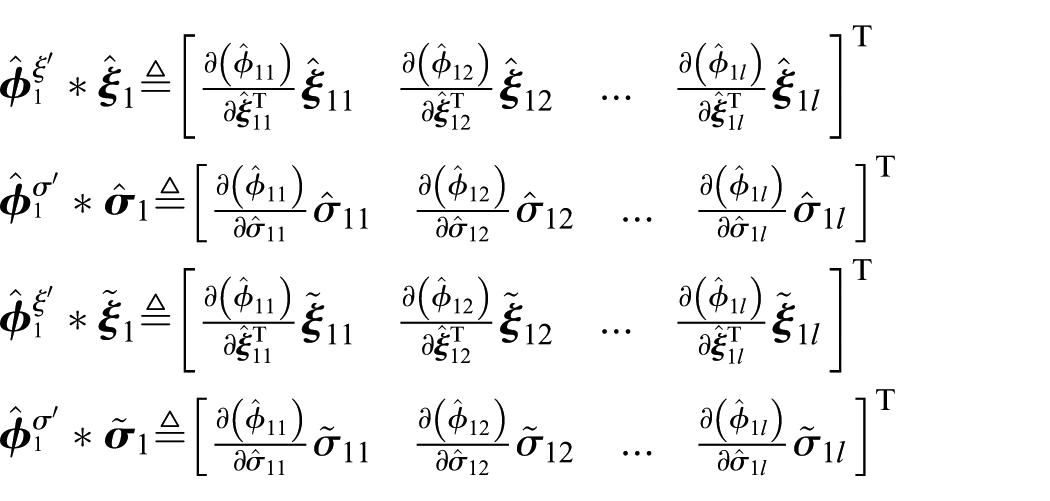
Substituting equation (39) into equation (46) leads to

According to the above analysis, the adaptive laws of neural network can be designed as



where
Substituting equations (48)–(50) into equation (47) leads to

Substituting equation (40) into equation (51) leads to

According to the Cauchy–Schwarz inequalities, we get





where

The robust term can be designed as

Substituting equation (59) into equation (58) leads to

According to the matrix property



Substituting equation (63) into equation (60) leads to
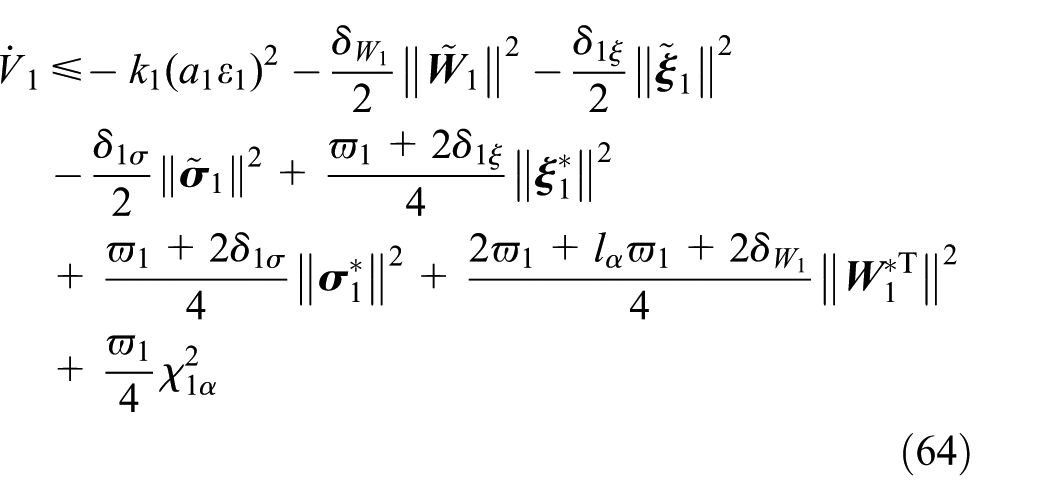
Equation (64) can be written as

with

where

with

Then, we obtain

According to the above analysis, the state error

The Nussbaum function must be used to solve the issue that the symbol of control coefficient

According to equation (71), it is obvious that errors
Step 2
Taking the time derivative of

where

The “computational expansion” issue from the backstepping design is present in equation (73) to bring huge difficulties for the controller design. By the analysis of equation (73), we know that

where
Finally, the actual controller

where
Choose the following Lyapunov function candidate

where
Taking the time derivative of equation (76), we have
with
Remark 5
Noting the fact that the symbol of a continuous smooth function
The unknown continuous function

with

where
Substituting equations (75) and (78) into equation (77) leads to

Equation (80) can be rewritten as

The adaptive laws can be designed as


Substituting equations (82) and (83) into equation (81) leads to

We know

Substituting equation (85) into equation (84), we get

Therefore, equation (86) can be rewritten as
According to the following inequality

We obtain

If

with


Multiplying both the ends of equation (90) with

The integration of equation (93) can be described as

with
According to Lemma 2, it is easy to get errors
The following inequality can be gained if

According to equation (94), we have

Furthermore, we have


According to equations (65) and (90), the state errors
Theorem 1
Consider the closed-loop system consisting of plants (17) and (18) with control laws (41) and (75), adaptive laws (48)–(50), and robust term (59). Then, all the signals involved are uniformly ultimately bounded. The output state error
Outer-loop controller design
For the system (16), velocity tracking error is defined as

where

where


with
Choose the following Lyapunov function candidate

Some notations of equation (103) will be explained in the rest of the content.
The time derivative of

Substituting equation (102) into equation (104) leads to

Equation (105) can be rewritten as

The control law

where

Substituting equations (107) and (108) into equation (106) leads to

with

The uncertainty term

with

where

where

Substituting equations (110) and (111) into equation (109) leads to

Substituting equation (113) into equation (115) leads to

The adaptive laws of neural network are designed as



where
Substituting equations (117) and (118) into equation (116) leads to

According to equations (114), equation (120) can be rewritten as

Owing to Cauchy–Schwarz inequality, we get




where
The robust term is designed as

Substituting equation (128) into equation (127) leads to




Substituting equations (130)–(132) into equation (129) leads to
Equation (133) can be rewritten as

with

According to equation (134), we get

where

Both the ends of equation (136) being multiplied by

The integration of equation (138) is expressed as

where the control coefficient
If

According to equation (139), we obtain

According to the Lyapunov function chosen, we get




where
According to equations (142)–(145), tracking error
Theorem 2
Consider the closed-loop system, consisting of plant (16) with control law (107), adaptive laws (108) and (117)–(119), and robust term (128). All the signals involved are then uniformly and ultimately bounded. The output state error satisfies the demands of prescribed performance.
Remark 6
The Nussbaum function is used to solve the unknown control direction issue in the inner-loop subsystem. Therefore, the robust term could not be introduced to handle the approximation error of a fully tuned dynamic neural network in Step 2 of section “Inner-loop controller design,” but the fully tuned dynamic neural network, having a stronger approximation ability, is introduced to approach uncertainties in Step 1 of section “Inner-loop controller design” and section “Outer-loop controller design.” In section “Outer-loop controller design,” the design method overcomes the influence of the Nussbaum function. The robust term is then introduced to solve the approximation error of the fully tuned dynamic neural network.
Simulation results
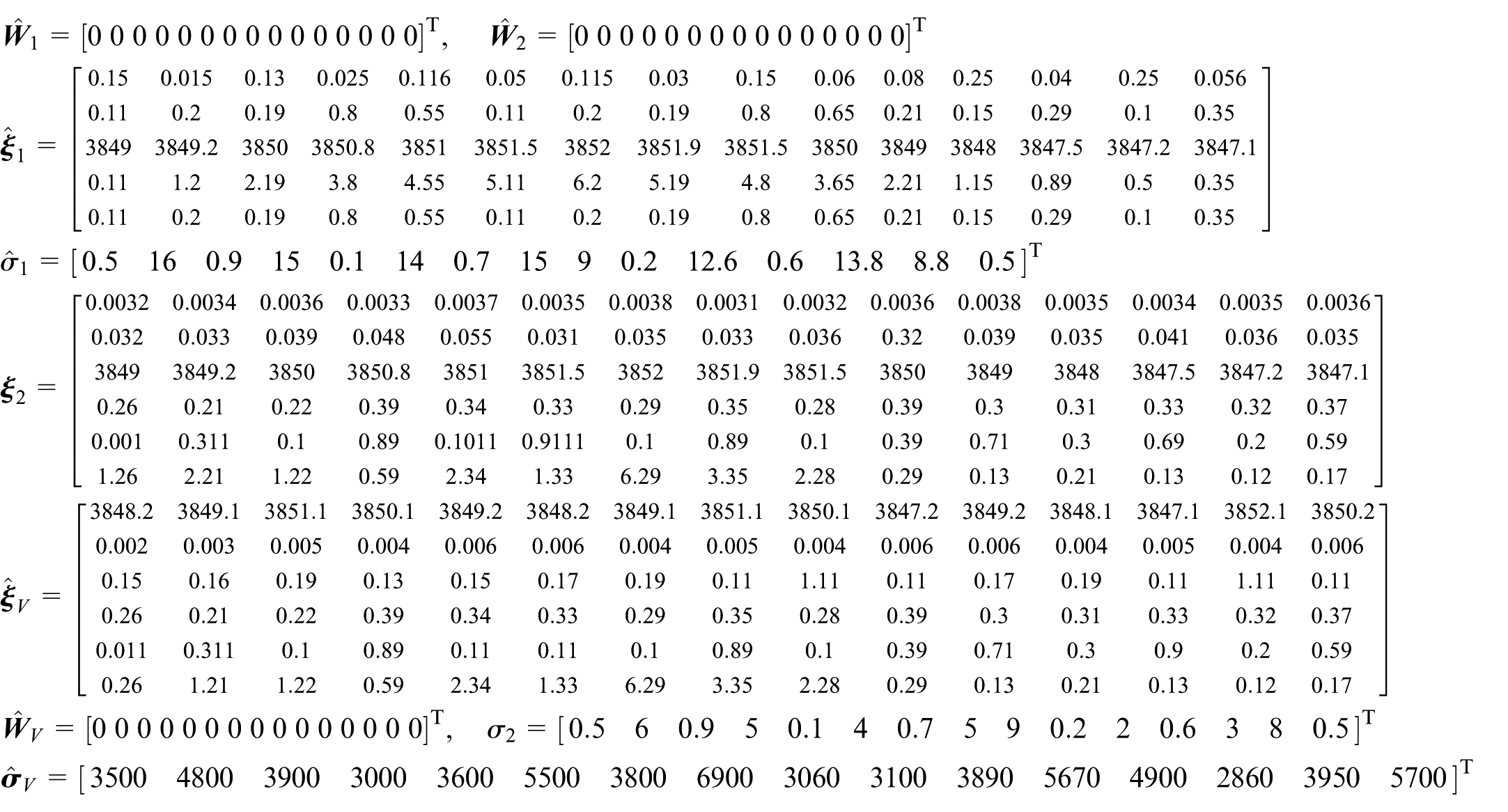
We demonstrate the proposed prescribed performance dynamic neural network controllers using the longitudinal dynamic models (1)–(6) of a flexible hypersonic vehicle. All the aerodynamic coefficients and model parameters are the same as Parker et al.’s study.
7
Let
Initial trim conditions.

Values of force and moment coefficients.

Let
The simulation results are expressed in Figures 2–19.

Angle of attack.
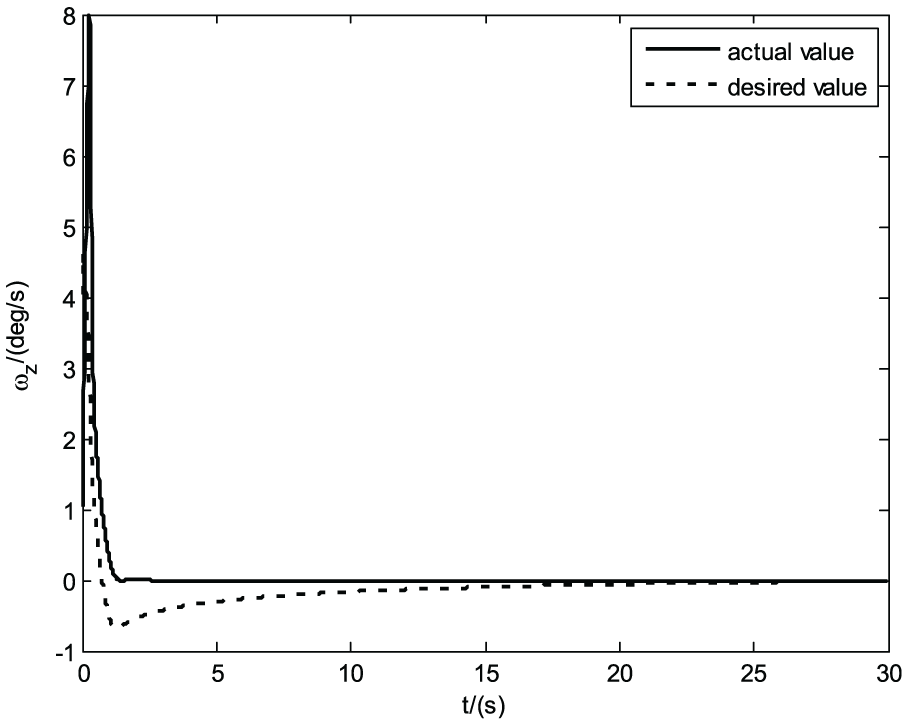
Rate of pitch.

Elevator deflection.

Velocity.

Equivalence ratio.

Curve of

Curve of
Curve of

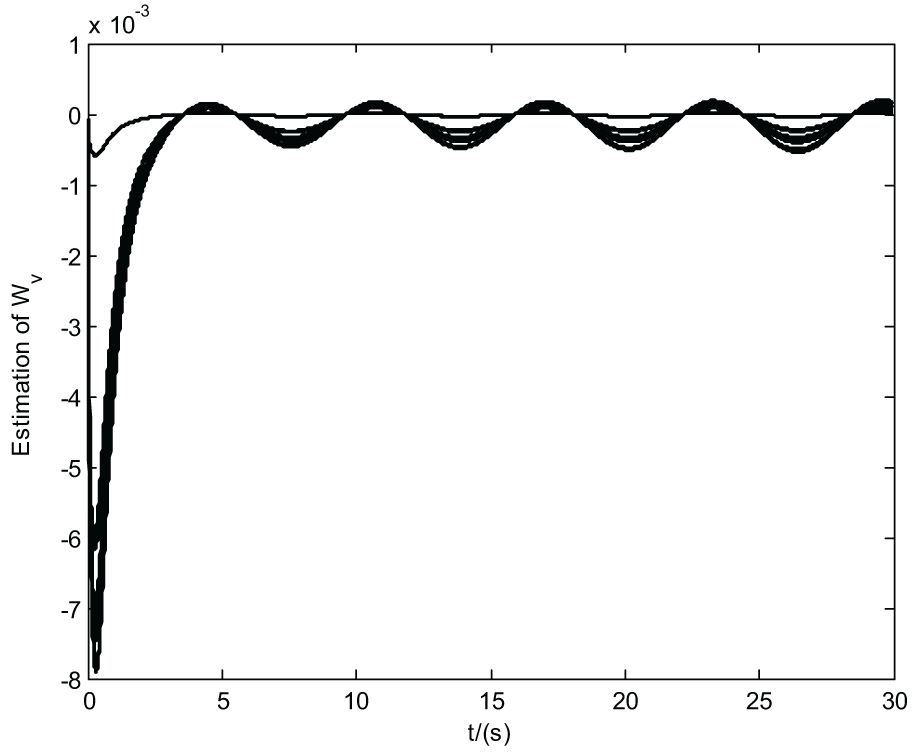
Neural network approximation
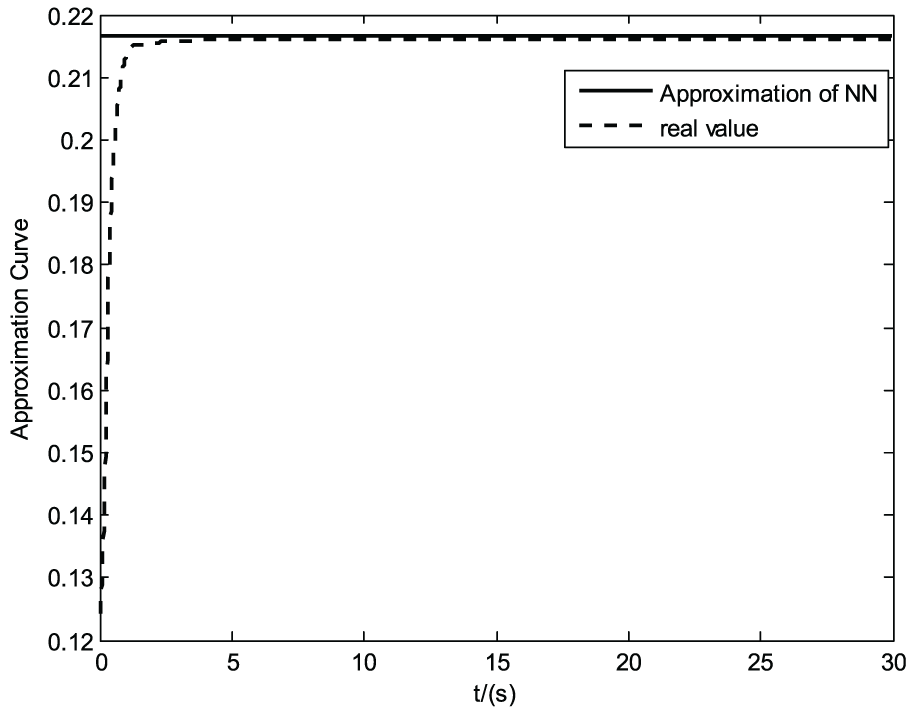
Neural network approximation

Neural network approximation

Curve of

Curve of

Curve of

Curve of

Curve of

Curve of

Curve of
According to the simulation results, it has been shown that altitude tracking errors
Conclusion
In this article, a control system is designed for a flexible hypersonic vehicle with the prescribed performance control, backstepping control, and RBF neural network method. The prescribed performance control method can guarantee the transient and steady performance of the tracking errors when velocity and altitude are formally specified. In this article, a new RBF neural network (which is called the fully tuned dynamic neural network) is introduced to approximate the following: the uncertainties of the system; the respective centers; the width of the Gaussian function; and the weight vector, which are regulated by adaptive laws. The unknown control direction issue is solved with the Nussbaum function. Finally, the effectiveness and superiority of the proposed control strategy are validated by simulation results. In the future work, the design will be toward the characteristics of flexible hypersonic vehicle dealing with the problem of real-time performance, the learning speed of neural network, and the large flight envelope.
Footnotes
Appendix 1
Handling Editor: Hongwei Wu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.