
Abstract
Control system is significant for making flight safety. In this study, a novel adaptive neural back-stepping controller is exploited for the longitudinal dynamics of a flexible air-breathing hypersonic vehicle. A combined neural network approach and back-stepping scheme is utilized for developing an output-feedback controller that provides robust tracking of the velocity and altitude commands. For each subsystem, only one neural network is employed to approximate the lumped system uncertainty by updating its weight vector adaptively while the problem of possible control singularity is eliminated. The uniformly ultimately boundedness is guaranteed for the closed-loop control system by means of Lyapunov stability theory. The main contribution is that the design complexity is reduced and less neural networks are required. Finally, simulation results illustrate that the proposed control strategy achieves satisfying tracking performance in spite of flexible effects and system uncertainties.
Keywords
Introduction
An increasing interest of air-breathing hypersonic vehicle (AHV) has been spurred owing to its prospect for a reliable and cost efficient space access.1,2 As a key issue in making AHV flight feasible and efficient, the flight control design has been studied widely.3,4 However, because of the noticeable flexible effects caused by the specific slender geometries and light structural weights, 5 and the inconstancy of the vehicle characteristics with varying flight conditions, significant uncertainties affect the vehicle dynamic model. Thus the flight control of AHV is still an open challenge. The control system for this special class of vehicle will have to be extremely robust toward the model uncertainties and external disturbances. 6
In the past decades, feedback control approaches combining various linear and nonlinear control methodologies have been presented for AHVs. A robust H∞ controller 7 is developed based on linearized model for the longitudinal model of AHVs. The numerical simulation on nonlinear dynamic model validates that this control strategy provides desired tracking performance with excellent robustness. An adaptive sliding mode controller 8 with well robustness with respect to parametric uncertainties is designed for the longitudinal dynamics of generic AHVs. To eliminate the undesired high-frequency chattering caused by the discontinuous control law, a continuous high-order sliding mode controller 9 is presented for a flexible AHV (FAHV). In that study, a nonlinear disturbance observer is employed to estimate the uncertainties in order to compensate the controller, which improves the sliding mode controller’s robustness. As instantiated by Bu et al., 10 the altitude subsystem can be rewritten as the strict-feedback form. Back-stepping has been evolved as a very effective methodology for dealing with uncertain system with such strict-feedback form. By assuming that the vehicle inertial parameters and the coefficients in the forces and moment approximations are subject to uncertainty, a robust adaptive controller 11 is designed based on back-stepping. The uniformly ultimately boundedness of that control scheme is guaranteed by the adopted parameter projection estimation. The problem of control input constraint is also considered in that paper. Similar study is also made by Bu et al. 12 Different from the previous studies, a severer uncertainty condition is considered in previous works.13–16 The dynamic model of AHV is assumed to be partially or completely unknown in those studies. Neural network (NN) is employed to estimate such unknown dynamics while novel NN-based output-feedback controller with strong robustness is developed for AHVs. 17 Viewing each subsystem of AHV as a lumped unknown system, only one radial basis function (RBF) NN is needed to approach such unknown system 16 while the problem of “explosion of differentiation” that is encountered by Bu et al. 18 is eliminated.
Although the above works provide effective and efficient methodologies for the flight control design of AHVs, the following challenging problems have not been fully investigated. (1) In many existing studies, the flexible effects are not taken into account adequately. (2) The computational burden should be further reduced.
Motivated by the previous results, a novel adaptive neural controller is presented based on back-stepping scheme19–23 for the longitudinal dynamics of FAHVs to provide robust tracking of velocity and altitude commands. For the altitude subsystem which is decomposed into two newly functional systems, namely the altitude-flight-path-angle (h-γ) subsystem and the pitch-angle-pitch-rate (θ-Q) subsystem. For each subsystem, only one RBF NN is employed to estimate the lumped system uncertainty while the adaptive neural controller is developed based on the output-feedback formulation. By that means, the possible control singularity problem is dealt with and the computational burden reduces greatly. Similar controller is designed for the velocity subsystem. Simulation results are presented to demonstrate the efficacy of the investigated control algorithm.
The remainder of this article is organized as follows. Section “FAHV model” presents the longitudinal model of FAHV which is formulated as output-feedback form. The RBF NN is presented briefly in section “RBF NN approximation.” The novel adaptive neural controller is investigated, and the stability of the closed-loop system is proved in section “Adaptive neural controller design for FAHV.” Section “Simulation study” shows the simulation results, and the conclusions are presented in section “Conclusion.”
FAHV model
The longitudinal dynamic model of FAHV
The longitudinal dynamic model considered in this study is developed by Bolender and Doman. 24 This vehicle is assumed to be a flat Earth, and its span is normalized to unit depth. As pronounced by Parker et al., 25 the weak coupling between the rigid body states and the flexible ones can be eliminated. Hence, we obtain the following nonlinear motion equations26–28







This model contains five rigid body states: velocity V, altitude h, flight-path angle γ, angle of attack α, and pitch rate Q and four flexible states:

with

where
Output-feedback formulation
The control objective pursued in this article is to design output-feedback controller Φ and δe such that the velocity V and the altitude h track their reference trajectories Vref and href from a given set of initial trim conditions to the desired trim values. It is worthy to note that the velocity V is mainly related to Φ and the altitude h is mainly affected by δe, since the thrust T affects V, and δe has a dominant contribution to h change in equations (1)–(9). Thus it is reasonable to decompose the motion equations (1)–(5) into the velocity subsystem (i.e. equation (1)) and the altitude system (i.e. equations (2)–(5)).
The velocity subsystem equation (1) can be formulated as

where

The control objective of velocity subsystem is to design an adaptive neural controller Φ to make V→Vref.
The altitude subsystem equations (2)–(5) can be rewritten as two new subsystems, namely the h-γ subsystem (i.e. equations (2) and (3)) and the θ-Q subsystem (i.e. equations (4) and (5)).
Define the altitude tracking error as

if k > 0, kI > 0, and γ→γd, the altitude tracking error
According to the definition of pitch angle θ, we obtain θ =γ + α. Hence the h-γ subsystem can be rewritten as

where
The control objective of h-γ subsystem is to design a virtual controller θd based on back-stepping to make γ→γd. Thus, the next design objective is to make sure θ→θd.
The θ-Q subsystem can be rewritten as
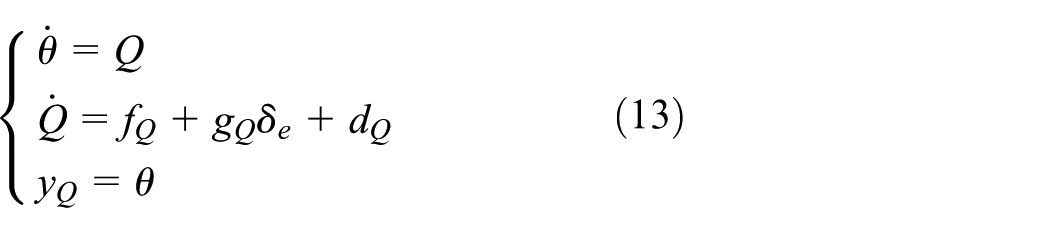
where
The control objective of θ-Q subsystem is to design an adaptive neural controller δe to make θ→θd.
Remark l
By regulating the neural controller Φ, we have V→Vref.
By regulating the neural controller δe and the virtual controller θd, we obtain θ→θd and γ→γd, further, h→href.
Noting that the altitude subsystem is a complex high-order system, we decompose it into two newly functional systems, namely the altitude-flight-path-angle (h-γ) subsystem (i.e. equation (12)) and the pitch-angle-pitch-rate (θ-Q) subsystem (i.e. equation (13)), all of which are low-order systems. In this way, the design procedure of back-stepping becomes simple.
Assumption 1
gV, gγ, gQ, fV, fγ, and fQ are completely unknown smooth functions.
16
But gV and gγ are strictly positive, and gQ is strictly negative. It is assumed that there exist constants
Assumption 2
There exist positive constants gVM, gγM, and gQM such that
Remark 2
According to the discussion by Gao et al.15,16 and the values of coefficients in Tables 2–8 in Appendix 1, it is easy to note that Assumptions 1 and 2 hold.
Assumptions 1 and 2 are only required for analysis purposes in the following stability proof, and the knowledge of the lower and upper bounds for
Different from the existing studies7–9 in which the dynamics of FAHV are assumed partly unknown, in this study, we assume that gV, gγ, gQ, fV, fγ, and fQ are completely unknown. In this way, the controller can provide a stronger robustness, since it does not rely on exact dynamic model.
RBF NN approximation
In this article, RBF NN is utilized to approach the system unknown function because of its excellent performance and global approximation. RBF NN can be instantiated as

where

where
It is worthy to point out that the ideal weight vector

It is easy to know that
Adaptive neural controller design for FAHV
In this section, by assuming that the rigid body states V, h, γ, α, and Q are available for measurement, we investigate an adaptive neural controller for FAHV based on back-stepping design.
Adaptive neural controller design for the velocity subsystem
Design the velocity tracking error and error function


where λ1 > 0 is a design parameter.
Differentiating equation (18) along equations (10) and (17) yields

where

Since

where

where
Substituting equations (20) and (21) into equation (19) leads to

where
Design the following Lyapunov function candidate

Differentiating equation (24) along equations (22) and (23) yields

Considering that

Let

The radius of
Adaptive neural controller design for the altitude subsystem
In what follows, the design of adaptive neural controller for altitude subsystem includes two steps. In Step 1, an adaptive neural controller is developed for the h-γ subsystem. Step 2 represents the neural controller design for the θ-Q subsystem.


where
Differentiating equation (29) along equations (12) and (28), we obtain

where

Let

where

where


where
Differentiating equation (35) along equations (13) and (34) yields

where

Take

where

where
Substituting equations (32) and (33) into equation (30), and equations (37) and (38) into equation (36), we have


where
Design the following Lyapunov function candidates


Differentiating equation (42) along equation (33) and (40), and equation (43) along equations (39) and (41) leads to

Noting that


the following inequalities hold


Let

The radius of
Let
By choosing sufficiently large
According to the analysis results of sections “Adaptive neural controller design for the velocity subsystem” and “Adaptive neural controller design for the altitude subsystem,” it is easy to get the following theorem.
Theorem 1
Consider the closed-loop system consisting of plants (10), (12), and (13) with Assumptions 1 and 2, controllers (21), (32), and (38), and adaptive laws (22), (33), and (39). Then, the tracking errors e1, e2, and e3 are bounded. By choosing sufficiently large
Remark 3
According to LaSalle-Yoshizawa Theorem together with the inequalities (26), (48), and (49), it is clear that all the signals in the Lyapunov functions (24), (42), and (43) are uniformly ultimately bounded. Thus, the possible control singularity problem is avoided, since the tracking error functions
Remark 4
We should select
Simulation study
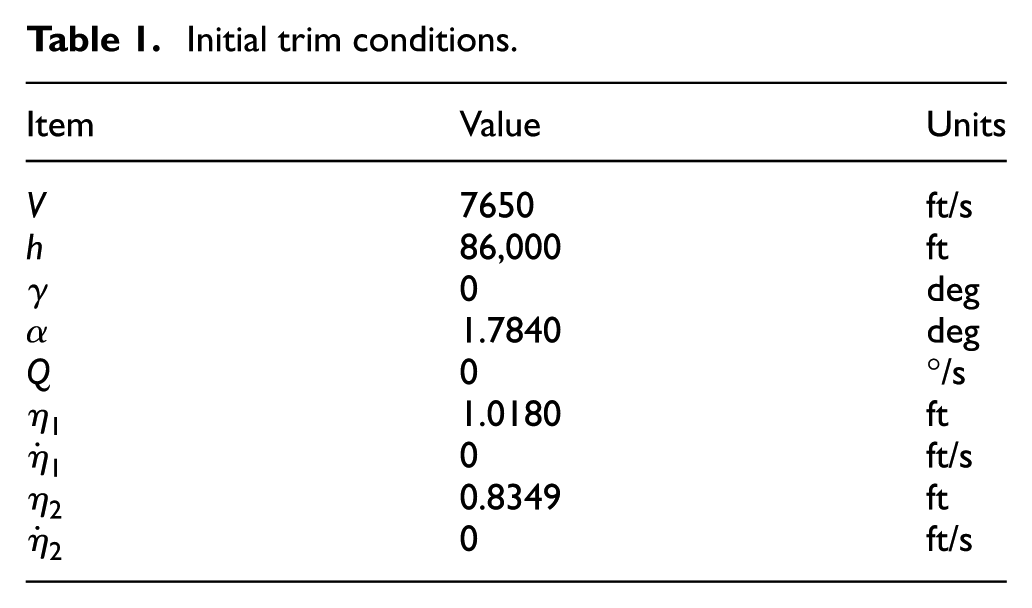
The adaptive neural controllers (21), (32), and (38) with adaptive laws (22), (33), and (39) are tested in MATLAB/Simulink® in the case of a climbing maneuver from the initial trim conditions, provided in Table 1, to the final trim conditions h = 90,000 ft and V = 8401 ft/s. The reference trajectories of velocity and altitude are generated via the following filters


Initial trim conditions.
The inputs of RBF NNs are selected as
To show the superiority, the proposed controller is compared with a traditional back-stepping controller presented by Bu et al.
33
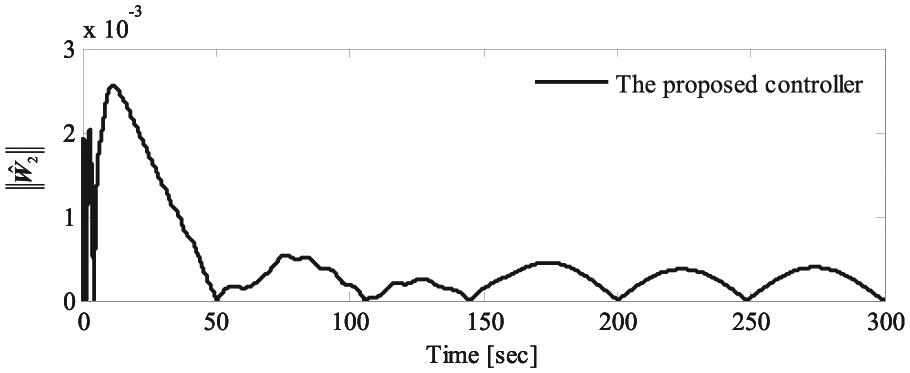
The simulation results are presented in Figures 1–12. Figures 1–4 show that the tracking errors e1, e2, e3, and

Velocity tracking performance.
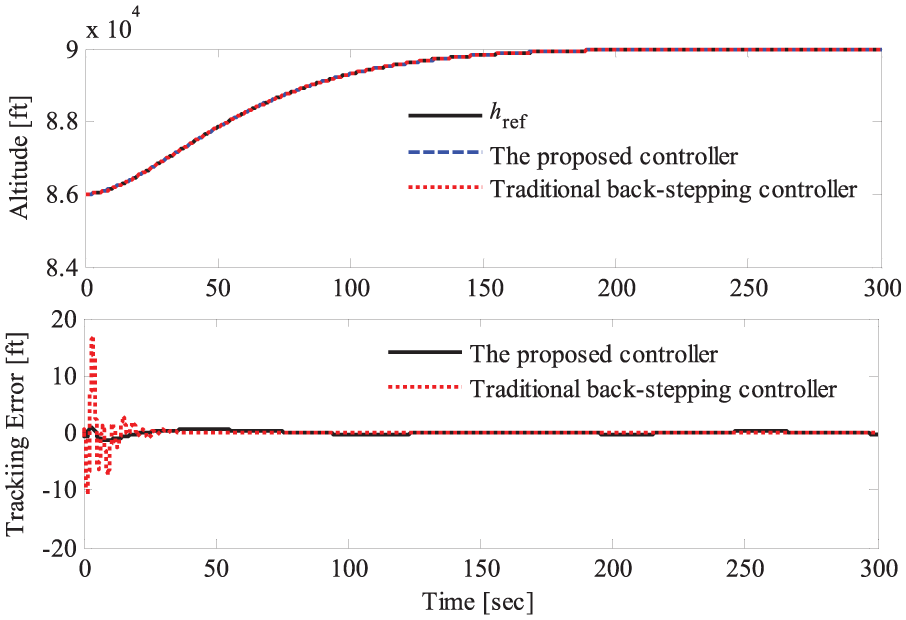
Altitude tracking performance.

Flight-path angle tracking performance.
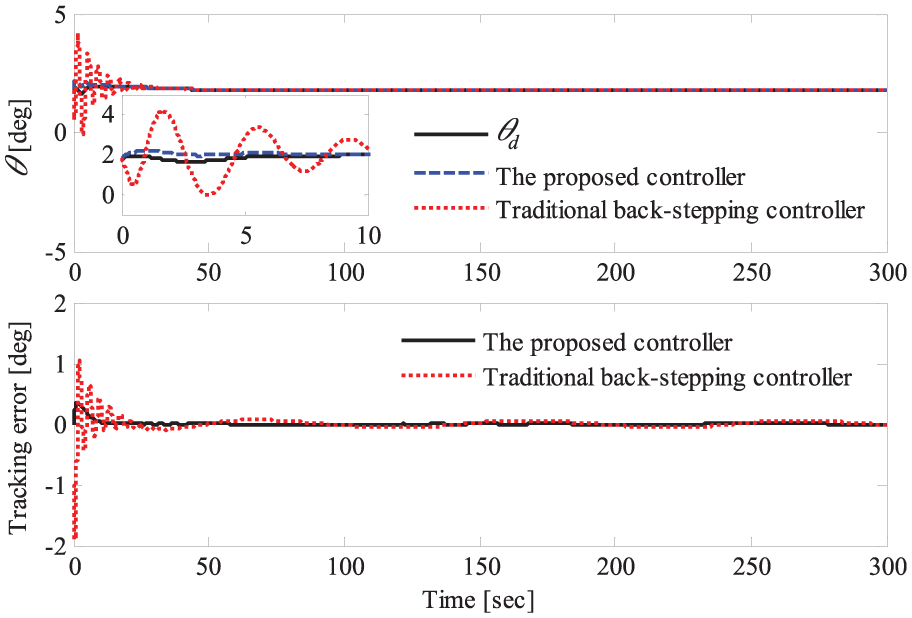
Pitch angle tracking performance.

Fuel equivalence ratio.

Elevator angular deflection.

Angle of attack.

Pitch rate.



Conclusion
The problem of adaptive neural back-stepping control design for FAHV is studied in this article. Different from the model adopted in the existing studies, a dynamic model including the flexible effects and completely unknown functions is considered in this study. The RBF NN with quite simple adaptive law is employed to approach the lumped system uncertainty, which avoids complex computation. The stability analysis demonstrates the boundness of the tracking errors. Simulation results show that a satisfying velocity and altitude tracking performance can be achieved by the developed controllers. Dealing with the problem of control input constraints is our further work. The future research is focused on prescribed performance-based control.34,35
Footnotes
Appendix 1
N2 coefficient values.

| Coefficient | Value | Units |
|---|---|---|
| –5.0227 × 103 | lb ft−1 slug–0.5 rad−2 | |
| 2.8633 × 103 | lb ft−1 slug–0.5 rad−1 | |
| 1.2465 × 103 | lb ft−1 slug–0.5 rad−1 | |
| –4.4201 × 101 | lb ft−1 slug–0.5 |
Acknowledgements
The authors would like to express their sincere thanks to anonymous reviewers for their helpful suggestions for improving the technical note.
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported the National Natural Science Foundation of China (grants no.: 61603410, 61703424, and 61703421) and the Young Talent Fund of University Association for Science and Technology in Shaanxi, China (grant no.: 20170107).