
Abstract
This article investigates a novel nonaffine control strategy using neural networks for an air-breathing hypersonic vehicle. Actual actuators are regarded as additional state variables and virtual control inputs are derived from low-computational cost neural approximations, while a new altitude control design independent of affine models is addressed for air-breathing hypersonic vehicles. To further reduce the computational load, an advanced regulation algorithm is applied to devise adaptive laws for neural estimations. Moreover, a new prescribed performance mechanism is exploited, which imposes preselected bounds on the transient and steady-state tracking error performance via developing new performance functions, capable of guaranteeing altitude and velocity tracking errors with small overshoots. Unlike some existing neural control methodologies, the proposed prescribed performance-based nonaffine control approach can ensure tracking errors with preselected transient and steady-state performance. Meanwhile, the complex design procedure of backstepping is also avoided. Finally, simulation results are presented to validate the design.
Introduction
Air-breathing hypersonic vehicles (AHVs) have been viewed as a critical solution to achieving reliable affordable access to near-space for both commercial and military applications. 1 –3 However, the special peculiarities of AHVs’ dynamic characteristics and aerodynamic effects make the control design highly challenging. 4,5 Furthermore, the motion model constructed for AHVs must be highly nonlinear and coupled owing to the airframe-integrated scramjet engines and time-varying flight conditions. Thus, the vehicle model is completely nonaffine in the control inputs. Besides, excellent transient performance and real-time performance are also required for AHVs’ control systems because of the hypersonic speed and super maneuver.
Recently, flight control designs for AHVs have been given special considerations, and various control methodologies have been addressed based on simplified affine models of AHVs instead of nonaffine ones. For the longitudinal dynamics of an AHV subject to parametric uncertainties, a robust controller with L ∞ performance is developed utilizing a disturbance observer, which provides robust tracking of velocity and altitude reference trajectories. 6 To cope with conservatism disadvantage derived from robust control, a terminal sliding mode control (SMC) approach is presented for an AHV and furthermore a sliding mode disturbance observer is introduced to enhance the controller’s robustness against system uncertainties and external disturbances. 7 Tian et al. 8 proposed a multiple-time scale-based second order SMC scheme for a flexible AHV, while the chattering problem connected with traditional SMC is handled. By combining fractional order proportion integral and derivative with active disturbance rejection control method, a nonlinear flight controller is devised for an AHV to provide accurate and fast tracking of desired attitude signals. 9 In addition, fault-tolerant controllers, 10,11 predictive control law, 12 and constrained control methodologies 13 –15 are also widely studied for AHVs.
Under strict assumptions, the altitude dynamics of AHVs can be rewritten as a strict-feedback system of affine formulation. On this basis, several backstepping control methods are investigated for AHVs employing disturbance observer, 16 projection algorithm, 17,18 perturbed system, 19 and neural network. 19 –21 It is noted that traditional backstepping control needs a complicated recursive design procedure, yielding a series of virtual control laws and causing a problem of “explosion of terms.” In each virtual controller, there is a neural network utilized to approach the subsystem uncertainties. Moreover, to stabilize the closed-loop control system, massive online learning parameters are required for neural approximations. For this reason, the real-time performance of those controllers 19 –21 may not meet requirements. Thereby, simplified neural control approaches are studied for AHVs, and online learning parameters are reduced via advanced learning algorithms. 22 –24
Owing to the lack of technical tools, few works that concern transient performance of control systems have been proposed in the above literature. Recently, guaranteeing transient performance–based prescribed performance control methods have been presented for AHVs to provide robust tracking of reference commands with the tracking errors satisfying the predesigned transient and steady-state performance.
25
–28
Unfortunately, none of them can guarantee the tracking error with small even zero overshoot. In this article, a novel prescribed performance control approach using nonaffine models is proposed for an AHV based on neural approximation. The special contributions are summarized as follows: Compared with the existing affine control schemes,
4,6,7
the presented nonaffine control strategy exhibits higher fidelity due to the avoidance of model simplifications. Different from traditional neural control strategies,
19,21
the system uncertainties are lumped together and advanced regulation schemes are developed to directly estimate the norm of neural networks, on the basis of which both the required neural networks and online learning parameters are reduced greatly, yielding a low-computational burden design. By comparison with traditional prescribed performance control approaches,
28,29
better transient performance guaranteeing small overshoot can be imposed on tracking errors based on a newly constructed prescribed performance mechanism.
The rest of this article is structured as follows. The vehicle model and preliminaries are shown in the second section. Third section presents the control design process. Simulation results are drawn in the fourth section and the final section draws the conclusions of this article.
AHV model and preliminaries
Model description
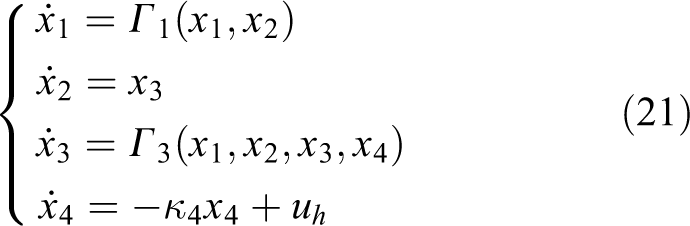
The AHV’s motion model adopted in this study is expressed as 30







where the five rigid-body states V, h, γ, θ, and Q denote velocity, altitude, flight-path angle, pitch angle, and pitch rate, respectively; the flexible states η 1 and η 2 are the first two generalized elastic coordinates. The thrust force T, the drag force D, the lift force L, the pitching moment M, the first generalized force N 1, and the second generalized force N 2 are given by 30





where the control inputs Φ and δ e, occurring implicitly in equations (1) to (7), stand for fuel equivalence ratio and elevator angular deflection, respectively. For more detailed definitions of other variables and coefficients, the reader could refer to Parker et al. 30
The control objective is to let h and V follow their reference trajectories h ref and V ref in the presence of parametric uncertainties, while altitude tracking error and velocity tracking error are limited within preselected bounds such that the desired transient performance and steady-state performance are guaranteed.
New prescribed performance mechanism
By prescribed performance, it denotes that the tracking error e(t) is strictly limited within an arbitrarily small residual set. Meantime, the convergence rate isn’t less than a given value and the maximum overshoot is less than a chosen constant. The mathematical expression of traditional prescribed performance is formulated as 29

where 0 ≤ δ ≤ 1 is a design parameter. The performance function ρ(t) is defined as 29

where
The aforementioned prescribe performance is clearly illustrated in Figure 1. It can be seen that there are two serious shortcomings for the traditional prescribe performance (8). The first one is that the behavioral bound (8) on the tracking error e(t) relies on the exact initial value e(0). Based on (8), the subsequent control design and stability analysis have to be implemented based on different initial conditions (e(0) is positive or negative), which is complicated and even unpractical. The second shortage is that we cannot insure the overshoot to be a small value, as shown in Figure 1.
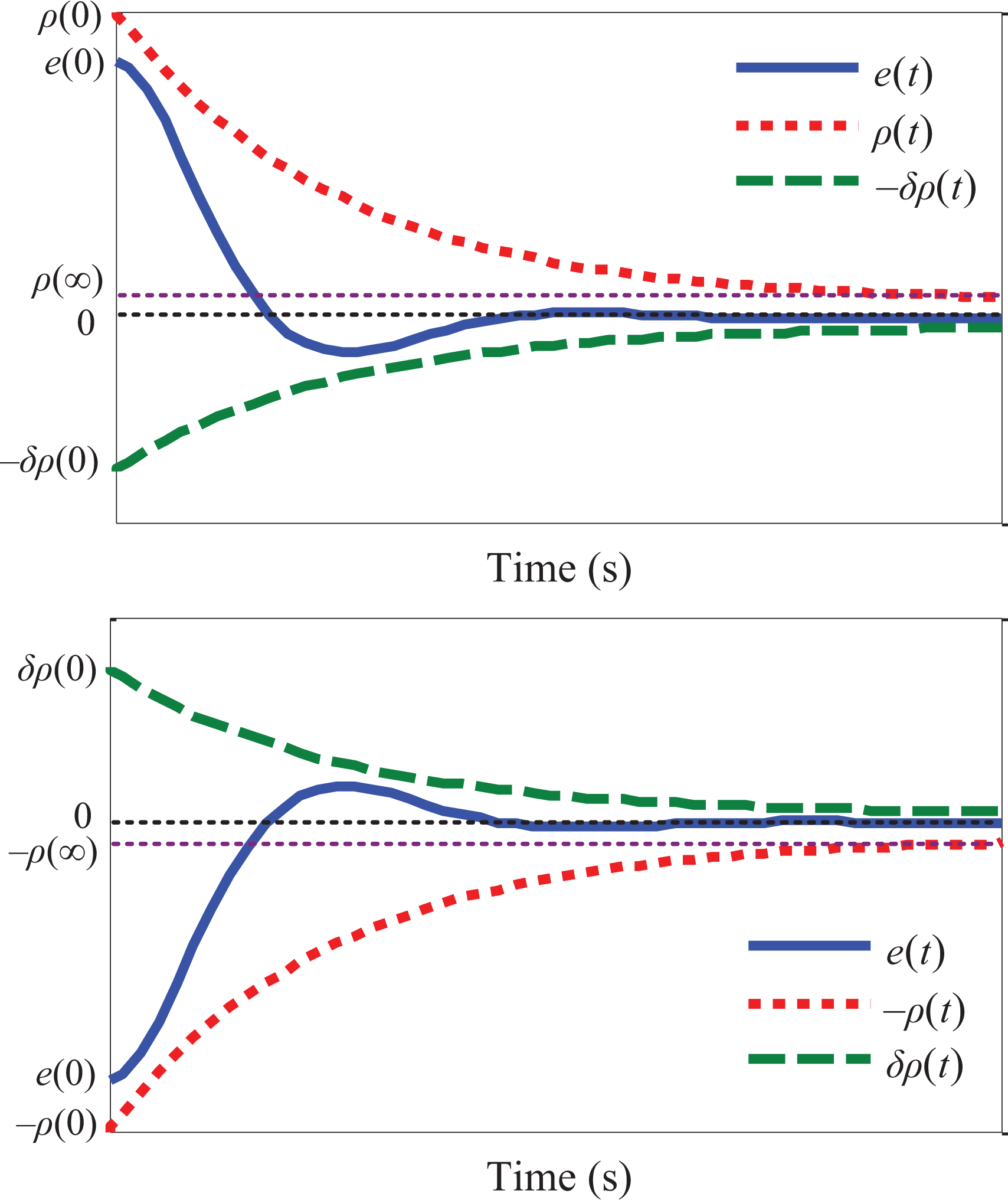
Graphical illustration of the prescribed performance definition (8).
To deal with the aforesaid shortcomings, we exploit a novel formulation of prescribed performance

The new performance functions

with
The newly defined prescribe performance (10) is exhibited in Figure 2. It is observed from Figure 2, equation (10), and equation (11) that the proposed prescribe performance formulation (10) is more concise than (8). Based on (10), the subsequent control developments and stability proof become much simpler than by employing (8). Furthermore, a small overshoot convergence of e(t) can be achieved by (10) when we select appropriate design parameters for

Graphical illustration of the newly defined prescribed performance (10).
Remark 1
For the rare condition of e(0) = 0, inequality (10) is also doable. When e(0) = 0, inequality (10) becomes
It is hard to directly devise controllers using the inequality (10). Thus, we define the following transformed error ε(t)

Theorem 1
If ε(t) is bounded, the tracking error e(t) can be limited to the constructed prescribed behavior bound (10).
Proof
The inverse transformation of (12) is given by

From (13), we further get

The boundedness of ε(t) leads to that there exists a positive constant εM such that

Noting that

Finally, we have

The proof is completed. □
Remark 2
In what follows, the controller will be explored using the transformed error ε(t) instead of the tracking error e(t).
Controller design
The pursued control objective in this section is to let h → h ref by developing a neural prescribed performance controller δ e for altitude subsystems (2) to (5).
The altitude tracking error

with
The reference command of γ is chosen as

where
If γ → γ
d, the corresponding dynamics of
Model transformation
The starting point is to transform the original nonaffine models (3) to (5) into a norm output feedback formulation.
Define

where the control input δ e is viewed as a newly defined state to deal with the nonaffine feature.
By introducing a virtual control input uh, the nonaffine systems (3) to (5) can be expressed as an affine one, which facilitates the altitude control design
where κ4 > 0, the system “
Remark 3
From equations (3) to (5), (21), and previous studies, 23,30 we have

Then, we make the following model transformation.
Step 1. Define

It is easy to note that
Step 2. We further define
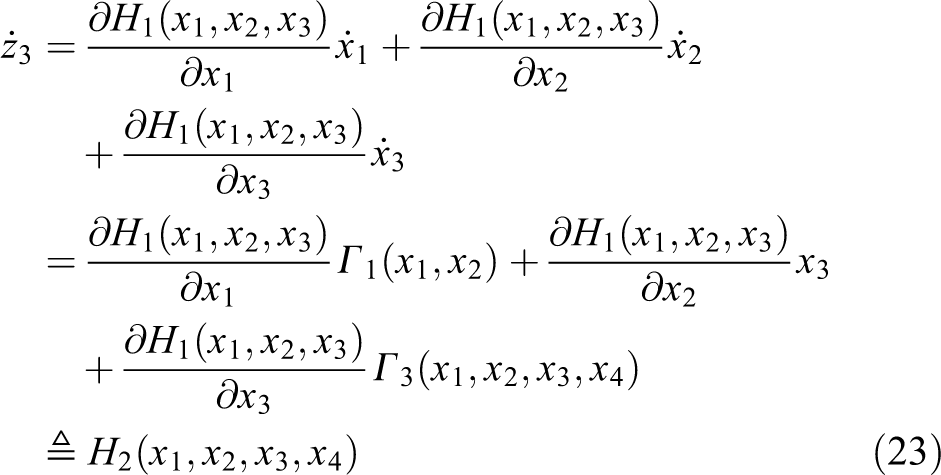
Step 3. Finally, we define
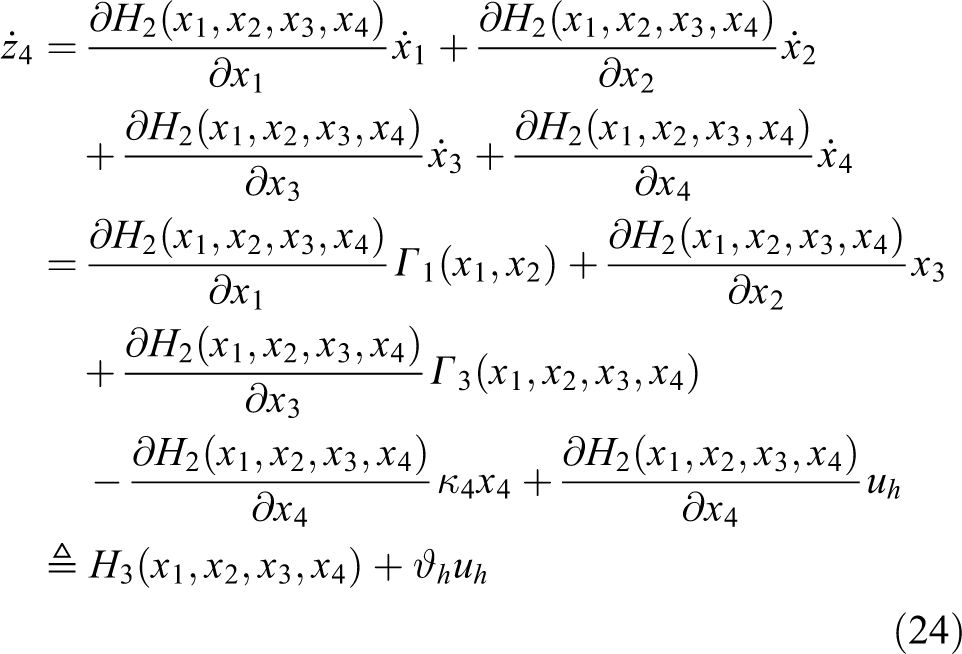
Notice that
With the above transformation, system (21) becomes

where
Altitude controller design
By the merit of a high-order SMC technique, a simplified adaptive neural control law is designed for (25) without utilizing backstepping.
Define flight-path angle tracking error eh and error function Eh as

where μ > 0 and the polynomial (s + μ)4 is Hurwitz.
Taking time derivative of Eh and invoking (25) and (26) lead to

with

where

where m is the node number;
Traditionally, the elements of
Define

where kh > 0 is a chosen constant;

with λh > 0.
Theorem 2
Consider the closed-loop system consisting of plant (25) with controller (30) and adaptive law (31). Then, all the signals involved are semi-globally uniformly ultimately bounded. Based on theorem 1, it is further concluded that
Proof
Define the estimation error as

Consider the following Lyapunov function candidate

Invoking (27), (28), (30) to (32), the time derivative of Wh is derived as

From the fact that

Notice that

Thus the following inequality holds

Let

If
Remark 4
Unlike the neural backstepping control methodologies addressed in literature, 19 –21 in this article, there is no need of complicated recursive design procedure of backstepping. Moreover, the presented control approach shows lower computational load than the ones of earlier studies 19 –21 since only one neural network is used and meanwhile only an online learning parameter is required for neural approximation.
Remark 5
In contrast to the neural controllers (NCs) of earlier studies,
20,21
the presented control method exhibits much lower computational load since only one neural network and one learning parameter
The number of neural network and learning parameter.

Velocity controller design
Noting that velocity dynamics of AHVs is simple, a proportion and integral controller is adopted.

with

where
Simulation results
This section presents numerical simulation results to verify the efficiency of the proposed control strategy. The input vector of neural network is

where C means the value of uncertain coefficient and C 0 denotes the normal value of C.
The design parameters are chosen as follows:

The proposed NC is compared with an improved neural backstepping control (INBC) strategy (When using the INBC method, parametric uncertainties aren’t considered.) to show its superiority in tracking performance. Two different examples are taken into consideration. In example 1, the initial tracking errors are chosen as positive values, that is,
The simulation results are depicted in Figures 3 to 8. Figures 3 and 6 reveal that the addressed NC scheme can provide robust tracking of altitude and velocity commands in the presence of uncertain parameters, and moreover the altitude tracking error and velocity tracking error provided by the addressed NC have better transient and steady-state performance with small overshoot than by the INBC approach. For both control methodologies, attitude angles, flexible states, and control inputs, shown in Figures 4 and 7, are bounded and smooth (without high-frequency chattering). The estimation performance of φ is presented in Figures 5 and 8.
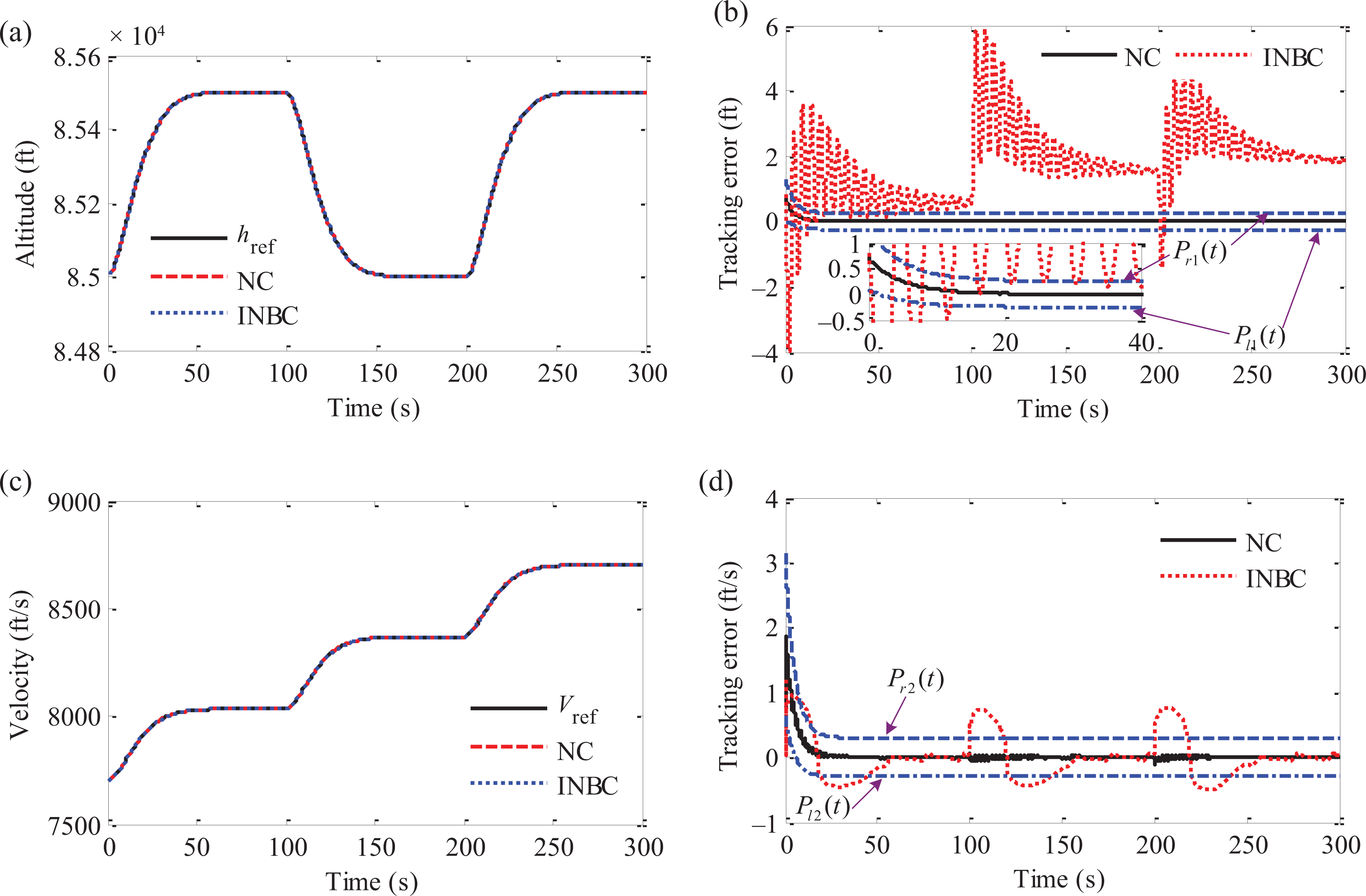
Altitude and velocity tracking in example 1. (a) Altitude tracking performance; (b) altitude tracking error; (c) velocity tracking performance; and (d) velocity tracking error.
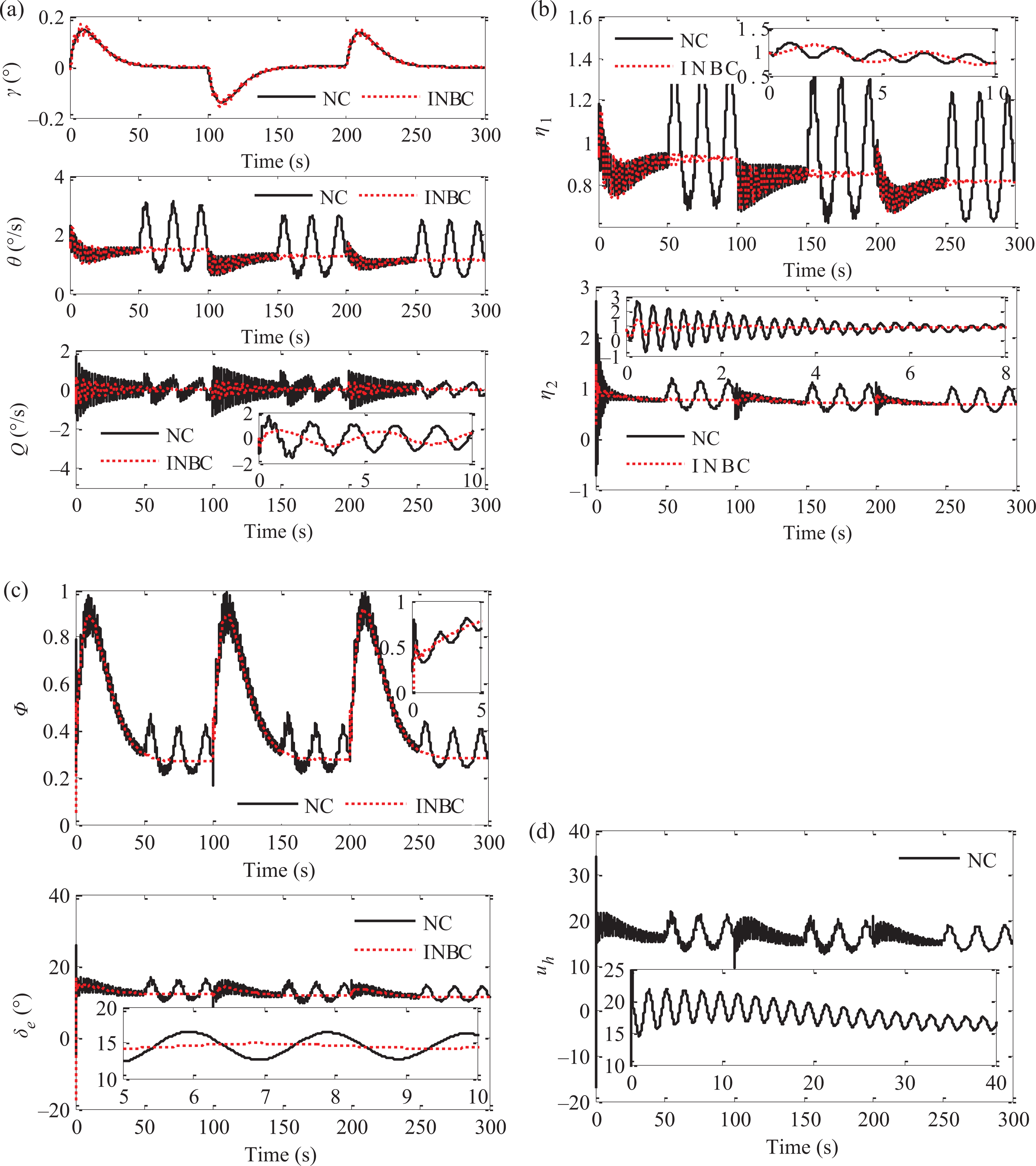
The attitude angles, flexible states, and the control inputs in example 1. (a) attitude angles; (b) flexible states; (c) control inputs Φ and δ e; and (d) virtual control input uh .

The estimation of φ in example 1.

Altitude and velocity tracking in example 2. (a) altitude tracking performance; (b) altitude tracking error; (c) velocity tracking performance; and (d) velocity tracking error.

The attitude angles, flexible states, and the control inputs in example 2.

The estimation of φ in example 2.
Conclusions
In this article, a novel proscribed performance control approach utilizing nonaffine models is exploited for an AHV via neural approximation. By introducing a virtual control input and making a model transformation, a simple adaptive NC with prescribed performance is proposed and the complex design process of backstepping is eliminated. Further, an advanced learning algorithm is applied to devise adaptive law for online learning parameter, based on which not only the control law’s robustness is guaranteed but also the computational cost is quite low. Besides, a new prescribed performance is presented to constraint the convergence overshoot of tracking errors. Finally, simulation results indicate that the addressed approach can guarantee altitude tracking error and velocity tracking error with excellent transient and steady-state performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant nos 61603410, 61703424, and 61703421) and Young Talent Fund of University Association for Science and Technology in Shaanxi, China (grant no 20170107)