
Abstract
In this article, a motion model for the liquid center of gravity in a truck’s partially filled tank is established to solve the roll-stability problem that can occur during vehicle maneuvers. A calculation for the overturn moment, together with a liquid-sloshing equivalent mechanical model, was coupled with the partially filled vehicle motion model using an improved optimization method based on a genetic algorithm for optimizing tank geometry. Four optimized geometries were calculated to select the best roll stability, and numerical simulation results showed that the elliptical cross-section tank, with a = 1.6–1.7 m (long axis) and b = 1.15–1.25 m (short axis), exhibits the best stability. These results can provide a valuable benchmark for vehicle design and roll-stability analysis.
Keywords
Introduction
Road tankers are widely used for transportation of dangerous and noxious liquid cargo all over the world. Rollovers account for the majority of tanker accidents and may lead to serious consequences, resulting in potential casualties and environmental pollution. Accordingly, solving the roll-stability problem becomes of great importance for partially filled tankers. 1 Liquid sloshing in partially filled tanks affects the vehicle’s driving stability during braking operations, potentially resulting in overturns and skids, due to the flow characteristics of the liquid. 2 Liquid sloshing forces in the tank differ from the load transfer of solid cargo, which can dynamically couple into the vehicle’s rolling motion. 3 The tank liquid’s center of gravity (CG), along with lateral load transfer, is an important parameter in determining the roll stability of partially filled tankers. 4
Numerous researchers have studied this stability for various tank geometries. Specifically, one particular study sought to minimize overturn potential by identifying the optimal height/width ratio of the tank. These results showed that the overturn moment is the key factor in improving roll stability in partially filled tankers. Budiansky 5 found that the liquid-sloshing phenomenon caused by tank vibration is related to the geometry of the tank, the fill level, and the sloshing frequency range. In addition, Hasheminejad and Aghabeig 6 concluded that the sloshing frequency and the sloshing force are related to these factors. If the natural sloshing frequency and the tank vibration frequency are very close, resonant behavior will occur. 7 However, the tank vibration frequency is relatively small compared with the natural sloshing frequency. 6
Previously, researchers applied a quasi-static (QS) method to establish a model for optimizing tank geometry, but the approach is quite simple with low accuracy. If applied to a whole model, this method can cause serious distortions and decrease model precision. In response to these challenges, evolution algorithms can present optimization techniques utilized in a wide range of operations including parametric optimization, automatic generation of computer programs, and combined issues. 8 Compared to traditional methods, in terms of global optimization, genetic algorithms (GAs) cannot achieve local optimums easily, even if the fitness function for the defined formula is discontinued with irregularities or noise, which can find the globally optimal solution with high probability. The traditional method is a single point search, and the distribution of the search space often falls into local extreme points of a unimodal. GAs have a group search feature which can be beneficial to the global optimal solution. 9
To date, research methods for liquid sloshing include QS methods, 10 fluid dynamics, 2 experimental and simulation methods, 11 and equivalent mechanical model. The derivation for a QS method is simpler, but has low accuracy. Experimental overturn methods for tankers have some obvious disadvantages, such as a high cost, relatively high test-equipment noise, low repeatability, and challenges to determining rollover limits. In light of these shortcomings, an equivalent mechanical model becomes more suitable for simulation and analysis of liquid sloshing inside the tank.12,13 Yuchun and Jinting 14 established an approximate skew-plane equivalent mechanical model to simulate sloshing by considering the CG, forces and moments, vibration frequency, and machine inertial characteristics.
In this article, a model for the CG height of the liquid in an elliptical tank cross-section and the tanker’s overturn moment are proposed based on the equivalent mechanical model. Partially filled tanker dynamics were combined with an equivalent mechanical model to build a fluid-solid coupling model. This optimized model, based on a modified GA, was used to optimize the tank geometry parameters to achieve optimal roll stability for the tanker.
Model optimization of a partially filled tanker’s roll stability
For roll stability analysis of a partially filled tanker, the interactions between the liquid and the tank pose a fluid-solid-coupled dynamics problem. Accordingly, two dynamic models were established: a liquid-sloshing equivalent mechanical model (also referred to as the fluid-dynamics simulation model) and a partially filled tanker dynamics model, as shown in Figure 1.

Flowchart of the optimization method.
Fluid-solid-coupled dynamic model for a partially filled tanker
Affected by liquid density and road axle-weight limits, liquid sloshing in the partially filled tanker can lead to roll instability.
Liquid-sloshing equivalent mechanical model
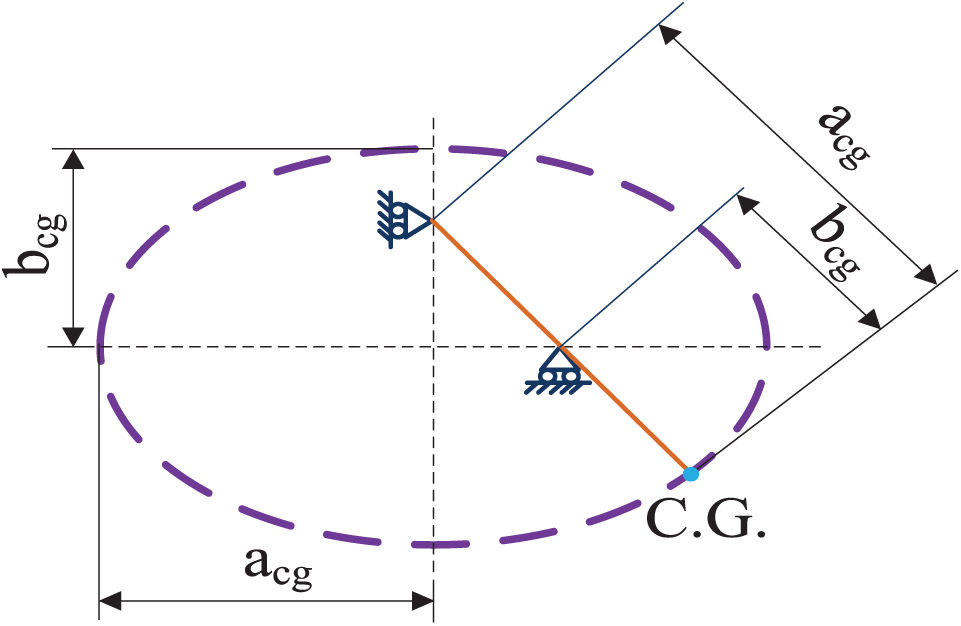
Under the effect of constant lateral acceleration, the free surface is always tangent to an ellipse with the same aspect ratio of the tank. 3 The liquid CG shares the same trajectory with the elliptical tank’s length-width ratio, where r is the aspect ratio, a and b are the lengths for the long and short axes of the tank, and aCG and bCG are the lengths for the axes of an ellipse through CG, as shown in equation (1) and Figure 1. Angle Φ between the free surface and the y-axis is equal to the lateral acceleration ay, and a single pendulum model for liquid sloshing in the tank is shown in Figures 2–4


Liquid-sloshing model in tank.
CG of the fluid by the trammel mechanism.

Initial and termination conditions for the simple pendulum model.
For a single pendulum model, let the sloshing-liquid mass-center displacement be X, the displacement variation be △x, and the angle between the cycloid and the y-axis be Φ, as shown in Figure 4. The initial (X–Y) and termination (X′–Y′) coordinate systems are also shown in Figure 4.
As shown in Figure 4, an equation for the position vector

The kinetic equation for the single pendulum model is as follows

A model for the potential energy Q is

and the Lagrange transformation is as follows

Thus, the equation for motion of the simple pendulum model is

where


The equation of motion can then be rewritten as

Partially filled tanker dynamic model
In order to study the liquid-sloshing force for the tanker, a partially filled tanker dynamic model was established. Figure 5 shows the tanker roll-plane model, where ml, ms, and mu are liquid mass, sprung mass, and unsprung mass, respectively. Parameters as and au are accelerations of the sprung mass and the unsprung mass, mp and ap are mass and acceleration of a single pendulum ball, and Ff and Fr are the experienced forces by the front and rear wheels. The partially filled tanker dynamic model then becomes



Roll-plane model (cross-section).
Size optimization method
The overturn moment and the height of the liquid’s CG are the most important factors in roll stability, and a decrease in the overturn moment and CG height can improve roll stability for the tanker. Therefore, these key characteristics are optimized in this article. By optimizing the fluid-solid-coupled dynamic model in equations (2)–(10), the optimization results require control of the long-axis (2a) and short-axis (2b) lengths of the elliptical tank. The liquid sloshing in the tank can influence the shape and size of the tank section and the external excitation intensity. In this article, the tank size is taken as the optimization objective to find the size parameters that make the overturning moment and the liquid core mass minimum. The size range is the largest and minimum value of the tank size which is more common in the market.
Improved GA
In this article, with the advantages of GAs in solving the global optimization problem, the fluid-solid dynamic model for an elliptical cross-section is optimized for tank size. In order to avoid premature local optimums, we expand the search space by increasing population diversity. When we are near the optimal solution, we can converge to the solution quickly, which does not increase the population size and avoids long operation times. It can also guarantee convergence to the globally optimal solution. To study the mutation rate for the elliptical cross-section, influenced by tank optimal size, the selected mutation rates were 0%, 2%, 4%, 6%, and 10%. According to two different liquid-level simulation results (80% and 90%), an improved GA flowchart is shown in Figure 6.

Flowchart for optimization using the GA.
Optimization result analysis with GA
The height of the mass center and the overturning moment are used as the optimization objectives. Overturning moment is an important index for evaluating the driving stability of tank truck. The actual vehicle test cannot directly measure the overturning moment, so in the real vehicle test, reference rollover moment value is used to judge the vehicle’s roll stability.
In order to simulate the whole process of algorithm evolution, we specify the fitness function as the overturn moment Mz. Equation (25), the liquid CG height Ycg, and equation (23) are based on the optimization calculations for two liquid fill-levels (80% and 90%), and these optimization results are shown in Figures 7 and 8.
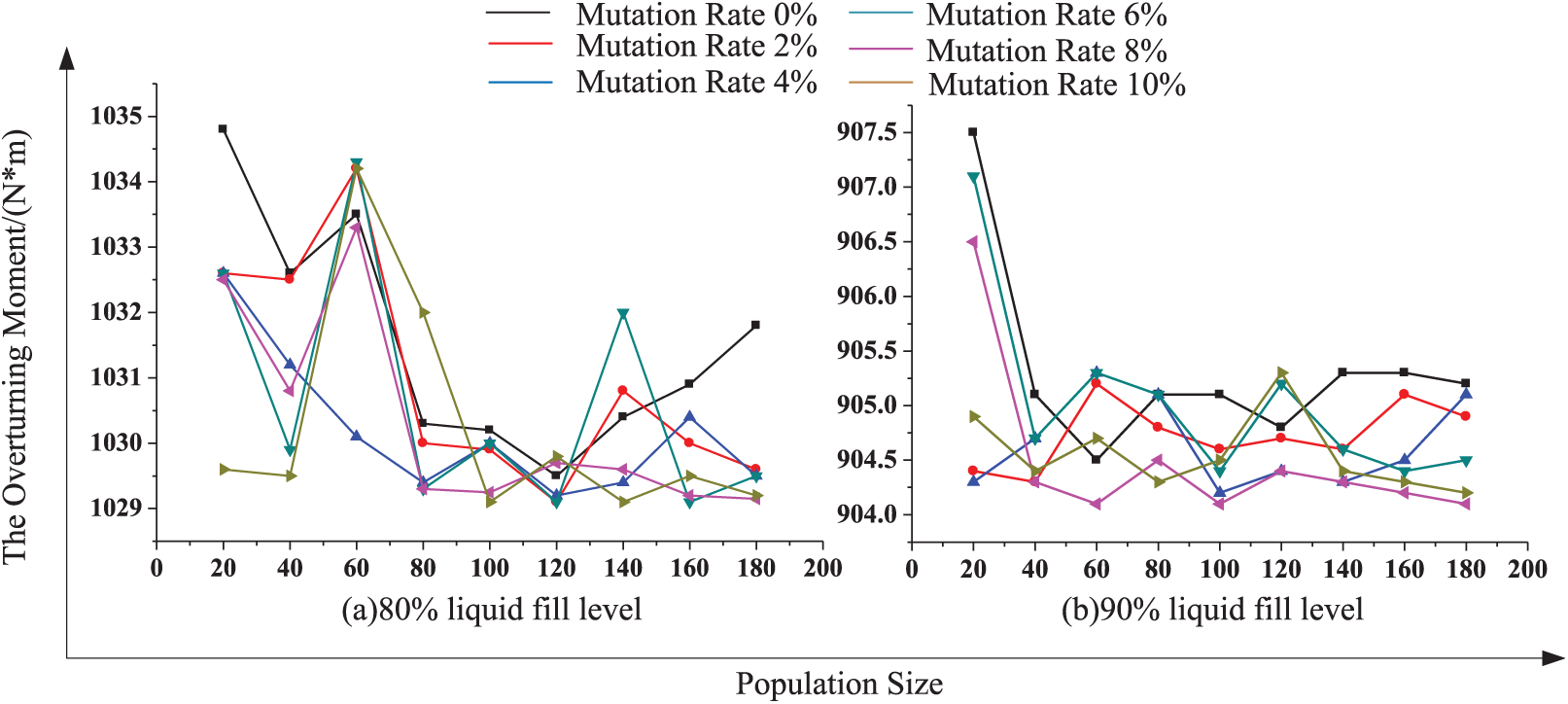
The overturn moment for different population sizes and mutation rates.
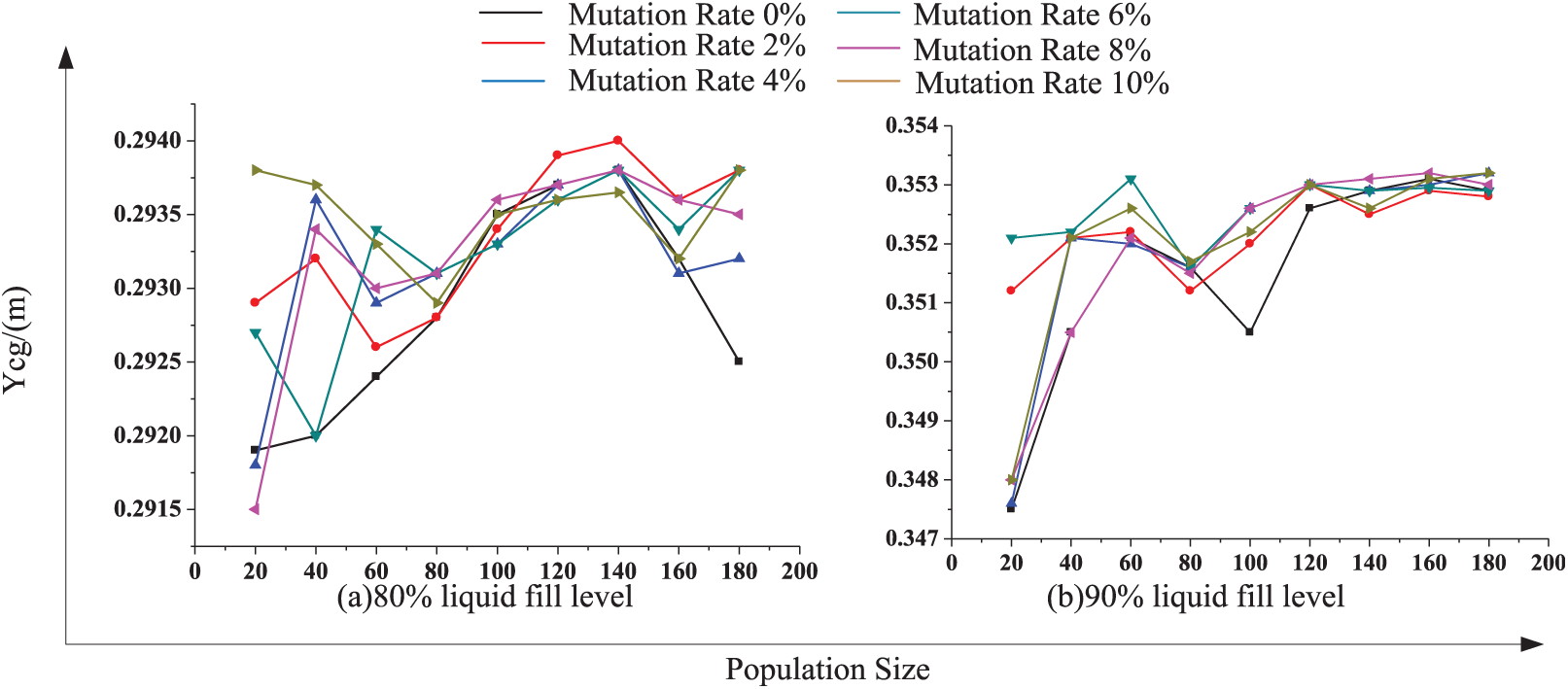
Ycg for different population sizes and mutation rates.
In this article, floating-point code and floating point array are used to represent the solution vectors. Compared with binary coding, floating point coding is not only more stable but also has shorter convergence time.
A variety of population numbers (20–250) and mutation rate (0%–15%) are tried, and the fitness function is diverged when the number of population is more than 180 or the mutation rate is more than 10%. For the overturn moment at a fill level of 80%, the population size is 20, and the mutation rates are 2%, 6%, and 8% of the fitness value of a much higher than others and the individual number greater than or equal to 80. The differences in fitness function values for different mutation rates are very small. In the case of liquid fill level of 90%, the number of individuals (population size) is 60, the mutation rate 0% and 10% of fitness value are similar and much higher than others, and the individual number is more than 100, all kinds of mutation rate corresponding to fitness value are advisable. As shown in Figure 7, many different mutation rates are advisable except for 0% and 10%, along with populations less than 40 or mutation rates less than 2% or more than 10%. The fitness function of the overturn moment is not compatible with the natural sloshing frequency of tank. Therefore, the population number should be at least 40. It can be seen in Figure 7, under the condition of 90% liquid fill, that the population number is 60 and the mutation rate is 8%, and the minimum during operation was 58, giving an optimal solution of a = 1.66 m and b = 1.22 m. For the 80% level, the individual number is 120 and the mutation rate is 4%, with a minimum at 53, arriving at the optimal solution of a = 1.44 m and b = 1.42 m.
For the liquid CG height optimization, as shown in Figure 8, we again analyzed liquid fill levels of 80% and 90%. For a liquid fill level of 80%, a population of 20 and mutation rates of 2% and 8%, the fitness value is minimum and these values are almost equal. For 60, the mutation rate is 6% and the liquid CG height reaches the global minimum; however, the mutation rates for 0% and 10%, for comparison purposes, do not accept fitness values, and this is also true for individual numbers less than 40 or mutation rates less than 2% or more than 10%. Since, again, the fitness function of the overturn moment is not compatible with the natural oscillation frequency of the tank, it can be observed (for an individual number of 60) that the mutation rate is 2%, where the corresponding centroid height is the smallest. The minimum occurred at the 63rd generation, yielding the optimized dimensional parameters of a = 1.8 m and b = 1.1 m. In more than 80% of cases, when the individual number is 80 and the mutation rate is 8%, the liquid CG height reaches the global minimum, at the 65th generation, obtaining a sizing of a = 1.7 m and b = 1.2 m.
Numerical simulations of real vehicle tests
According to the equivalent mechanical model, numerical simulations were used in this method. To verify the correctness of the optimization algorithm, the optimal tank size was obtained.
The numerical simulation
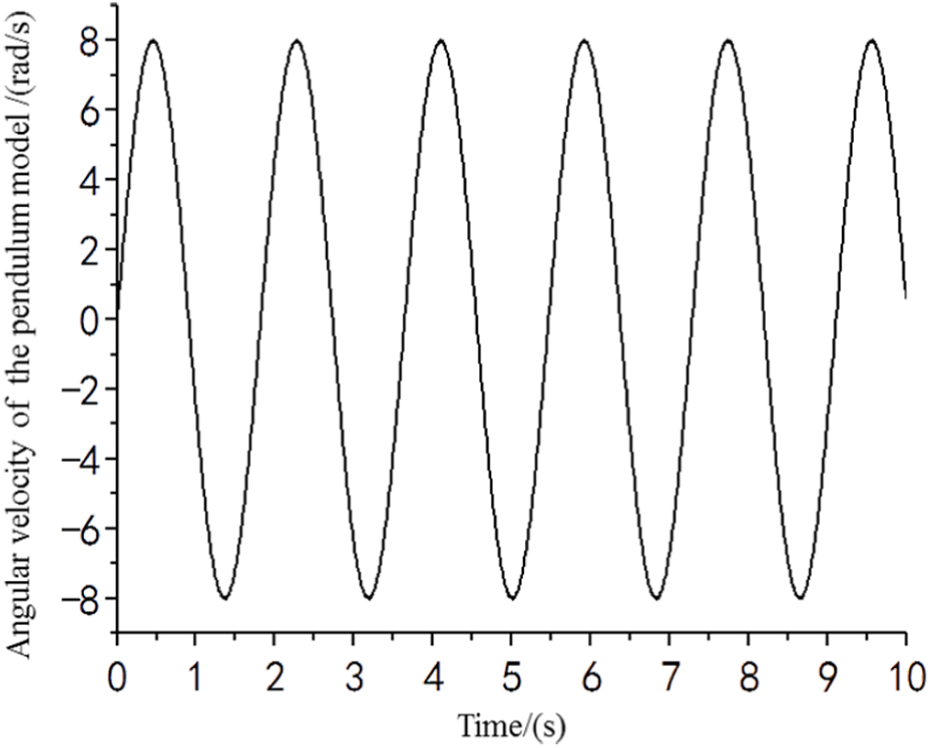
The equivalent mechanical model of liquid sloshing is simulated to analyze, using MATLAB to solve the second-order linear differential equations, and to obtain curve of the pendulum model under different angular velocities; the test result is shown in Figures 9–12. The simulation experiment, the initial pendulum swinging angle of 140, 180, 220, and 260 degrees. Test data diagram can be seen with the increase in the pendulum swinging angle, movement model similar to harmonic vibration. With the increase in the pendulum swinging angle, the motion model has the nonlinear characteristics.
Initial pendulum swinging angle of 140 degree.
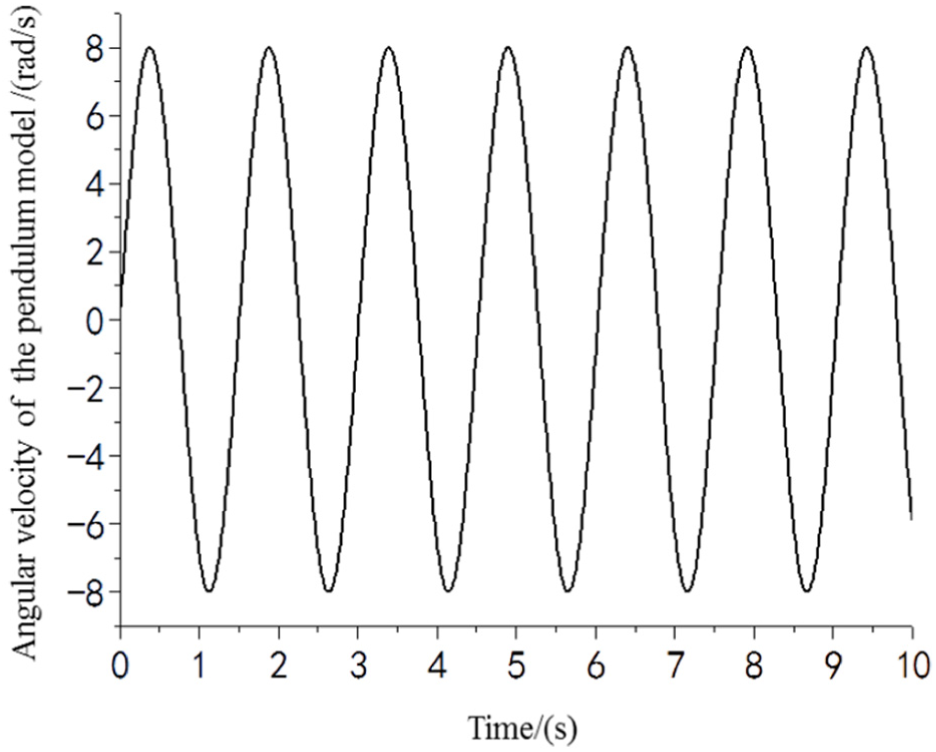
Initial pendulum swinging angle of 180 degree.

Initial pendulum swinging angle of 220 degree.
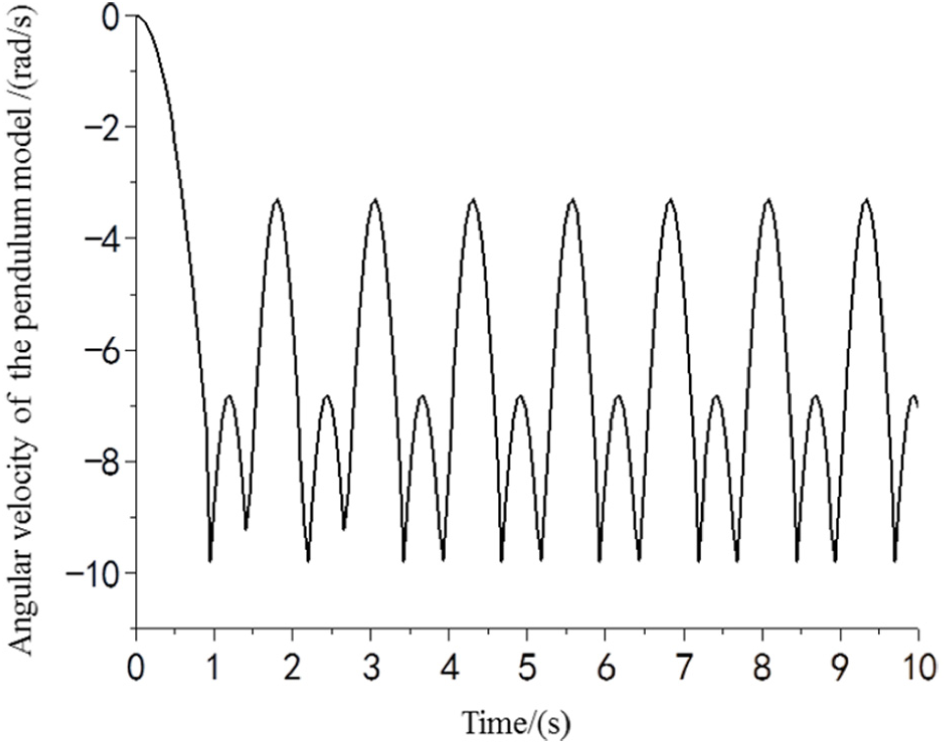
Initial pendulum swinging angle of 260 degree.
The real tanker experiment test
The liquid sloshing in the tank can influence the shape and size of the tank section and the external excitation intensity. In this article, the tank size is taken as the optimization objective to find the size parameters that make the overturning moment and the liquid core mass minimum. The size range is the largest and minimum value of the tank size which is more common in the market.
To use the improved GA to obtain the optimized tank size, according to the equivalent mechanical model, numerical simulations were utilized in this method. To verify the correctness of the optimization algorithm, optimal tank sizes were obtained.
To do so, four common tankers on the market were selected. The actual corresponding tanker specifications are shown in Table 1: Tanker 1 is a DongFeng Jinba, Tanker 2 is a DongFeng Xiaobawang, Tanker 3 is a Foton Jieshun, and Tanker 4 is a Foton Xiangrui. It can be seen that the Foton Jieshun tanker possesses overall dimensions (length × long axis × short axis) of 4100 mm × 1720 mm × 1150 mm, which are similar to the optimization conclusions in this article. The real vehicle experiments adopted a single-line test method, and the test peg diagram is shown in Figure 9, with the values L = 6 m, L1 = L3 = 30 m, and L2 = 25 m or L2 = 40.6 m. The values can be adjusted according to the specific models, where D = 15 m is lane change distance, and B = 1.2b + 0.25 is bench marking width (b represents car width).
Specification data for four tankers.

Experimental data are shown in Figure 10, suggesting that the Foton Jieshun tanker, for liquid fill levels from 40% to 90%, pole layout diagram is shown in Figure 13, demonstrates the minimum instantaneous maximum-roll moment is shown in Figure 14. Thus, the effectiveness and credibility of the optimization conclusion were validated.

Pole layout diagram.

Instantaneous maximum moment for four tankers.
Conclusion
In this article, a numerical calculation model for the liquid CG height and overturn moment was established, based on the QS method. To this end, a tanker vehicle motion model and liquid-sloshing equivalent mechanical model were considered through fluid-solid dynamic coupling. To minimize the overturn moment and the height of the liquid CG, the optimal elliptical cross-section as a tank geometry was validated using an improved optimization method based on GA to achieve roll stability improvement. Using the equivalent mechanical models for four tank optimization simulations, it was concluded that elliptical dimensions a = 1.6–1.7 m (long axis) and b = 1.15–1.25 m (short axis) exhibit optimal roll stability. The simulation results show that the y-direction force and roll moment are related to the tank geometry, the liquid fill level, and the length of the free surface. To test and verify the accuracy of the simulation test results, four common tank trucks were selected in this article, and real vehicle experiments verified the validity of the optimization method and the credibility of the optimization results. Consequently, these results can be applied in the vehicle design process, and according to different cross-section shapes and areas, optimized roll stability can reduce the cost of research and development in real vehicle tests.
Footnotes
Handling Editor: Andy Williams
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by “Heilongjiang Province Science Foundation for Youths” (QC2017040), the “Fundamental Research Funds for the Central Universities” (2572017BB01), and “The Northeast Forestry University 5211 special funding” (41112451).