
Abstract
The swing of the grab is a main factor affecting the working efficiency of overhead cranes. Thus, planning the optimal motion path can reduce the adverse effects caused by the grab swing and improve the loading and unloading efficiency. The dynamic model of the trolley–grab system is established by considering factors like the change of rope length, wind load, and air resistance. First, the radial basis function neural network is applied to generate a feasible motion trajectory of the crane trolley. Taking the swing angle and angular velocity of the grab at the discharge point as evaluation, the harmony search algorithm is then applied to optimize the neural network parameters and obtain the optimal anti-swing motion trajectory. The numerical simulation and practical testing results show that the harmony search–radial basis function algorithm generates a smooth motion trajectory with good convergence, achieving anti-swing control of the trolley–grab system.
Introduction
The overhead crane is an important machine for port cargo handling operations. To improve the working efficiency and safety of the overhead crane, it is necessary to actively suppress the sway of the grab. Nonlinearity and complicated dynamics make it difficult to move the grab to a specific location, thus a well-designed anti-swing control process allows the grab to maintain a small range of swing at regular times and strokes, ensuring accurate positioning of the grab and making the process flows overlap properly, thereby increasing handling efficiency while reducing energy consumption.1–3
In actual work, the overhead crane grab has a large stroke, so the anti-swing control process of the grab mainly includes three stages: acceleration and swing-elimination stage, uniform motion stage, and deceleration and swing-elimination stage. Among them, the acceleration and swing-elimination stage is coupled with the lifting movement of the grab, making it the most difficult part in the anti-swing control of the crane grab. There are two common methods in anti-swing control of the grab. One is to rationally plan the motion trajectory so that the ship unloader trolley can suppress the swing of the grab with its own speed change. The other is to set the adjustment control law to minimize the error between the real trajectory of the trolley and the reference trajectory and improve the anti-swing control accuracy. This study focuses on the first method.
Presently, scholars have proposed a variety of grab anti-swing control strategies based on these two methods. Scardua et al. 4 divided the unloading cycle into six subtasks and applied reinforcement learning together with a multilayer perceptron neural network to compute each of them, but the departure of grab lifting and trolley traveling makes this method less efficient; Cruz et al. 5 proposed a method to solve the minimum-time anti-swing motion planning problem by solving a sequence of fixed-time maximum-range linear programming problems. Panuncio et al. 6 designed a neural network self-tuning proportional–integral–derivative (PID) controller that improves the adaptability of the overhead crane during operation and has good control effect on the anti-rolling of the grab but ignores the change of rope length. Cologni et al. 7 proposed a fixed-order controller to attenuate the oscillations in overhead cranes by enforcing certain robustness and performance constraints, and the rope length is taken into consideration. Lee and colleagues8,9 designed the grab anti-swing controller using the Lyapunov method, and Chen et al. 10 used neural network and sliding mode control to control the position of the trolley and the swing angle of the grab. Fuzzy control methods are also applied in anti-swing control.11,12 Sun et al. 13 built the grab and cargo as a double-pendulum model and proposed to use the amplitude-saturated output feedback control method to suppress swing. Abdullahi et al. 14 considered the influence of wind on the crane system and proposed an online adaptive output-based command shaping technology to reduce the payload of the crane and successfully reduce the swing. Tuan and Lee 15 introduced the influence of geometric nonlinearity, cable elasticity, and wind disturbance; established a crane model that is more in line with actual working conditions; adopted a sliding mode control for the grab; and analyzed the stability of the system.
Existing research mainly focuses on the starting and ending points of the grab and disregard the state between them. A series of objectives such as trolley–grab dynamic model optimization, anti-swing control, and operational efficiency improvement are not considered together, which affects the anti-swing effect and control accuracy.
In this study, the influence of wind load and air resistance on the grab is introduced, and the vertical lifting phase of the grab is included in the dynamic model. The swing degree and velocity of the grab are measured and taken as the evaluation index the moment the trolley reaches the discharge point, and the unloading process is completed by means of throwing. The radial basis function (RBF) neural network is used to generate the trajectory of the trolley during the accelerating state, while the harmony search (HS) algorithm is applied to optimize the parameters of the RBF neural network to find an ideal reference motion curve. The numerical simulation and experimental data show that when the ship unloader trolley moves according to the smooth reference curve calculated from the above-mentioned offline model, the speed and acceleration of the grab during operation can be controlled. When the accelerating state ends, the swing speed is basically reduced to zero, which achieves the purpose of suppressing the swing of the grab and the dispersal discharge of the material and significantly improves the operating efficiency of the ship unloader.
Modeling of the trolley–grab system
The 800t/h overhead crane is the modeling prototype of the study, and the specific parameters are as described in section “Analysis and discussion.”Figure 1 shows the picture of the overhead crane. The bridge unloading operation system is mainly composed of a bridge frame, trolley, steel wire rope, and grab.

The trolley–grab system on 800t/h overhead crane.
In the operation process, the mass of the wire rope is too small to be neglected when compared with that of the crane grab, especially after loaded with cargo, along with the deformation of the wire rope in the long direction. Considering that the grab is completely filled each time, it can be simplified as a mass point that only moves in the xy plane. The force diagram of the overhead crane is shown in Figure 2, and the meaning of each parameter is shown in Table 1.
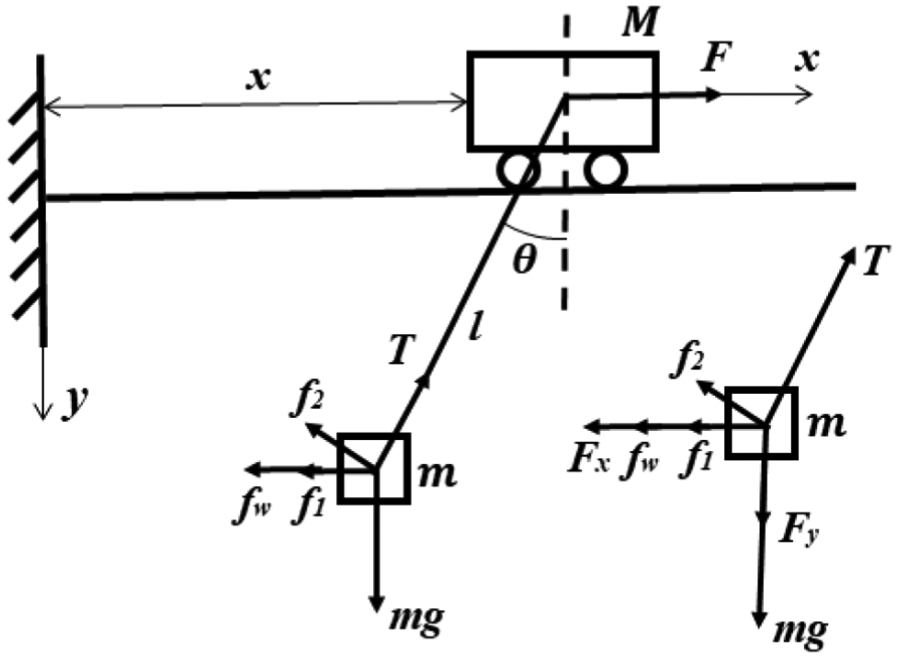
Schematic diagram of the trolley–grab system.
Main kinetic parameters of the overhead crane.

Select trolley displacement x and grab swing angle θ as the generalized coordinates, and take grab m as the research object. The centroid coordinates of the grab

As shown in Figure 2, the gravity of the grab m is analyzed according to the D’Alembert principle, where

Taking right as the positive direction of x and counterclockwise rotation as the positive direction of θ with respect to the vertical direction, the parameters in equation (2) can be obtained by the following formula
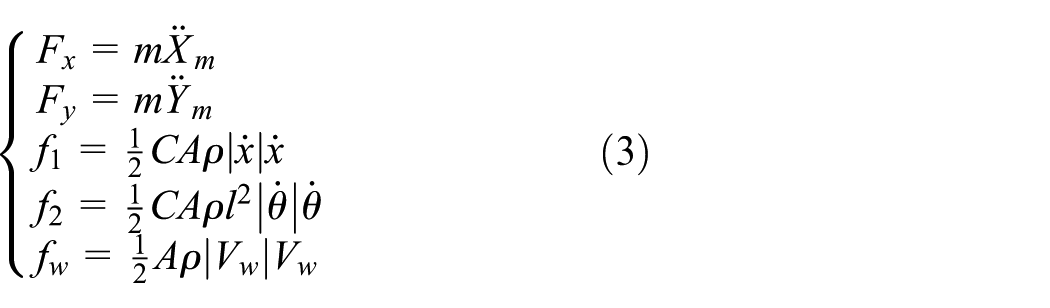
where C is the air resistance coefficient, A is the catching windward area, ρ is the air density, and

Anti-swing trajectory planning of trolley
Grab balance analysis
To suppress the swing of the accelerated swaying phase during the grab operation, the control target is set as follows: at time point
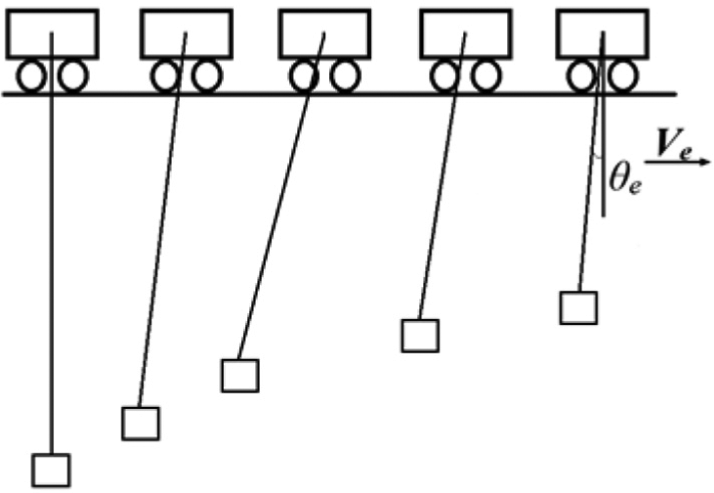
Grab anti-swing control process.
In Figure 3, due to the influence of wind load and air resistance, when the time point

Equation (5) shows that if the air resistance and the wind force are ignored, both the swing angle and the swing speed are zero when the grab reaches the equilibrium state at
The lifting process of the grab is a uniform motion process. According to the lifting height

Trajectory generation based on RBF neural network
The neural network has good nonlinear approximation characteristics. The output of the RBF neural network structure is linear with the weight, so some weights can be obtained directly by solving linear equations according to system constraints. This improves the accuracy and simplifies the optimization process. Therefore, the RBF neural network is used to generate the trajectory of the trolley.
The method for generating the trajectory of the trolley based on the RBF neural network is shown in Figure 4. A single-layer RBF neural network structure is adopted with a single input and single output, wherein the input is time

where N is the number of nodes in the middle layer of the neural network,

where

where

Schematic diagram of RBF neural network structure.
According to the control indicators described above,

Because the output of the neural network is linear with the weight
Parameter optimization of RBF neural network
After the trolley motion trajectory is generated by the neural network, the neural network parameters
HS algorithm
The HS algorithm is an optimization algorithm based on the simulation of band tuning. The basic idea of the algorithm can be described as follows: first generate initial solutions
Step 1. Set the initial harmony memory

Step 2. Learn a candidate solution from the harmony memory or randomly create one

where
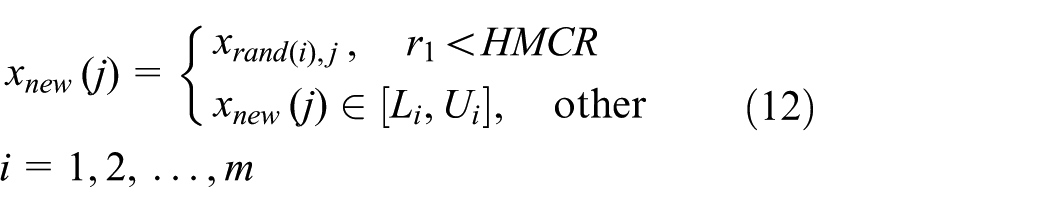
If

where
Step 3. Optimize the objective function
Step 4. Repeat Steps 2 and 3 until the maximal cycle is reached.
Fitness function for evaluation
Select the swing parameters of the grab as the fitness evaluation index when the trolley reaches the specified time point. The swing amplitude of the grab when it reaches the specified time

When the specified time point is reached, as the value of the fitness function

The values of
Analysis and discussion
Simulation result analysis
The acceleration and swing-elimination stage of the trolley–grab system were simulated. According to the operation requirements for the overhead crane described above, take the anti-swing control index
Figure 5 shows the simulation results of the algorithm iterating 50 times while ignoring the air resistance and wind load effects. Figure 6 is the simulation result of the algorithm iterating 100 times considering the air resistance and wind load effects.

Simulation results ignoring air resistance and wind load effects: (a) displacement curve of the trolley, (b) speed curve of the trolley, (c) swing angle of the grab, and (d) swing speed of the grab.

Simulation results considering air resistance and wind load effects: (a) displacement curve of the trolley, (b) speed curve of the trolley, (c) swing angle of the grab, and (d) swing speed of the grab.
In both Figures 5 and 6, the displacement and velocity curves of the trolley satisfy the constraint of equation (10), and the trajectory of the trolley is generated as required. The grab swing angle and the swing speed curves are optimized by the HS algorithm according to the fitness function shown in equation (14). Figure 5 is a simulation result when the air resistance and the wind load are ignored. Under this circumstance, the requirements of swing angle
Figure 6 is a simulation result when the air resistance and the wind load are considered. Under this circumstance, the requirements of swing angle
Figure 7 shows the comparison of speed curves of the trolley between the proposed method and a manual operation method without planning from the acceleration and swing-elimination stage to the discharge point. The manual operation method consists of two acceleration phases with a uniform phase between them. In this way, it avoids excessive swinging of the grab. After a constant motion, the trolley enters the deceleration phase and discharges above the hatch. Manual operation without optimization inevitably leads to continuous swing of the grab, making it difficult to achieve a stable state at the specified discharge point, delaying the discharge time, resulting in reduced operating efficiency. In this way, it avoids excessive swinging of the grab.
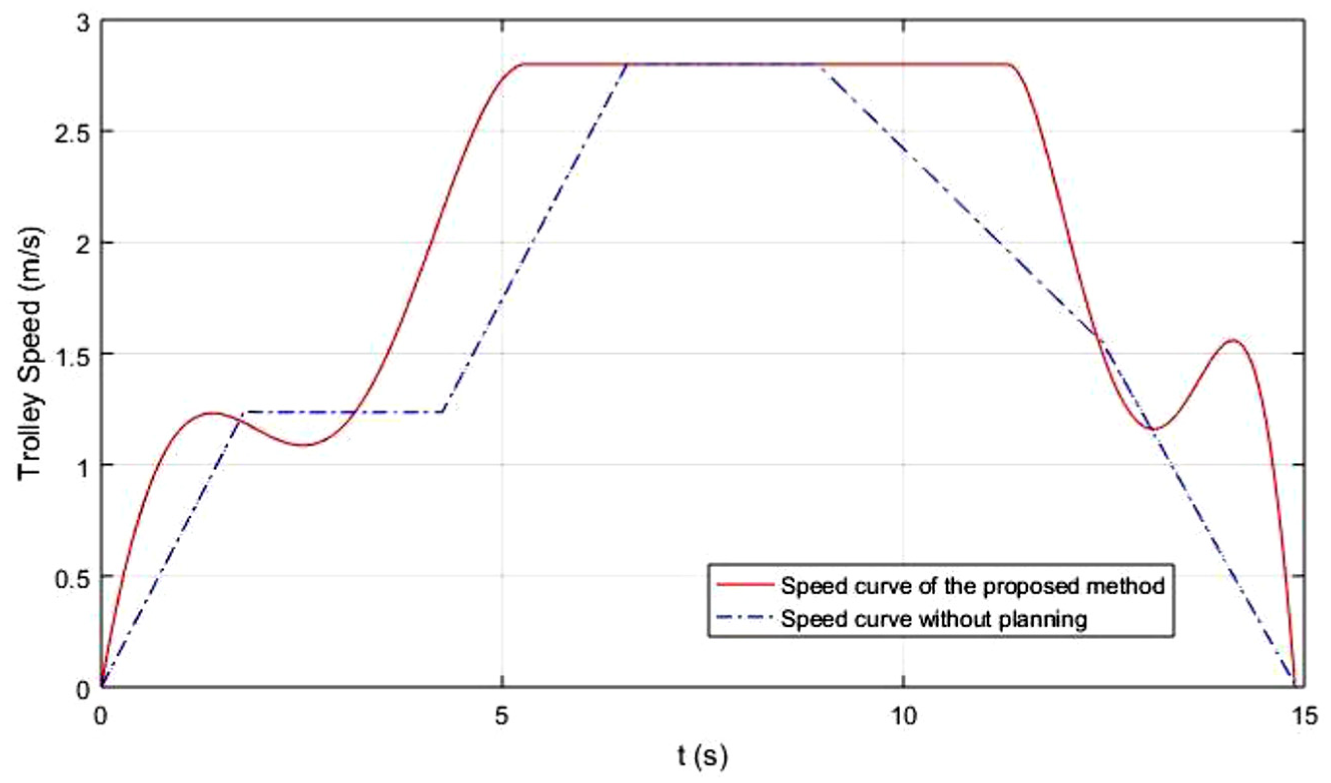
Comparison of speed curves between existing method and the proposed method.
Figure 8 shows the comparison of speed curves of the trolley between the proposed method and an existing method. The existing method applies the segmentation planning based on reinforcement learning to the trajectory planning of the trolley. However, the existing method did not take into account the negative effects of sudden changes in acceleration. The speed curve we provide is smoother during the transition phases. Under the same running time and distance, the speed curve obtained in this study can reduce the impact of the grab more effectively and avoid the occurrence of severe sway.
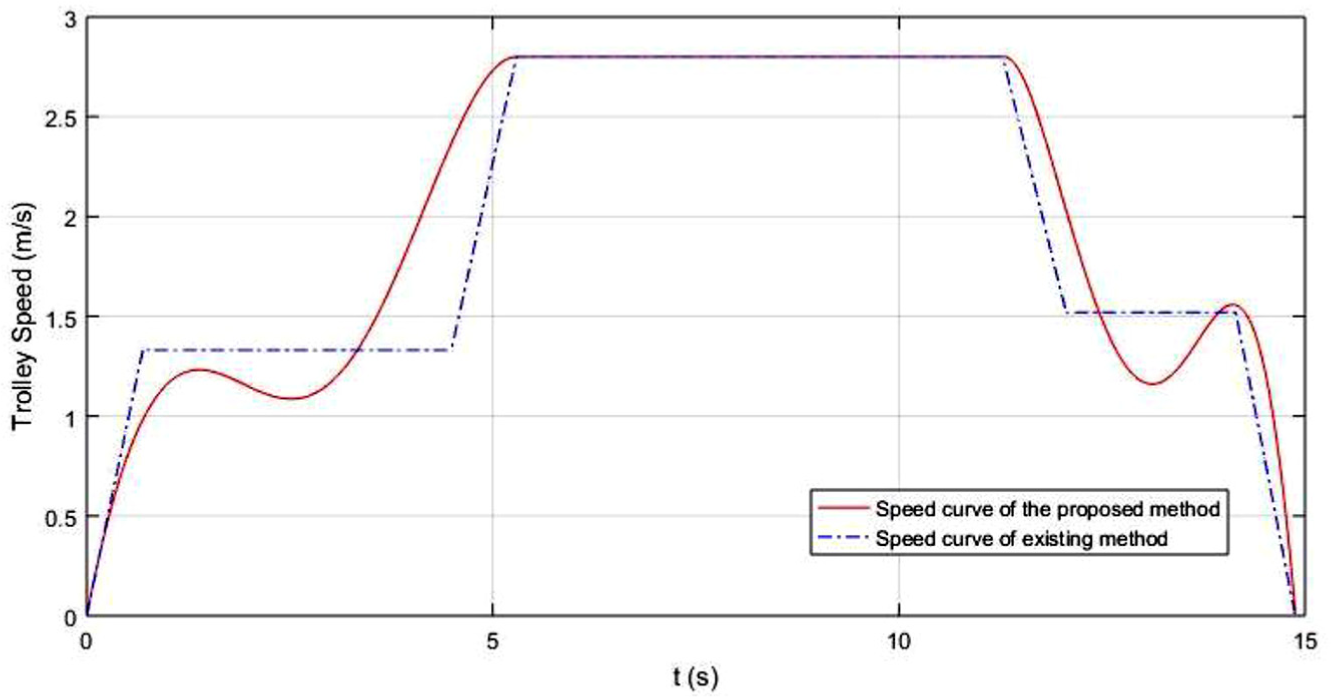
Comparison of speed curves between existing method and the proposed method.
Experiment result analysis
To verify the performance of the algorithm in practice, field tests were conducted at the port terminal. The physical parameters of the site were inputted, and the above algorithm was used to obtain the optimized motion trajectory as the reference trajectory. The running speed of the trolley is adjusted and controlled by the PID controller so that it can move according to the reference trajectory. Figure 9 shows the comparison between the ideal optimized target curve and the filtered actual trolley trajectory curve during the acceleration and swing-elimination stage.

Comparison between the target trajectory curve and the actual trolley trajectory curve during acceleration and swing-elimination stage. (a) The reference running speed curve and actual running speed curve of the trolley under PID control. (b) The theoretical swing speed curve and actual swing speed curve of the grab under PID control. (c) Theoretical and actual trajectory curve of the trolley–grab system under PID control.
Figure 9 shows that the real trajectory of the trolley is close to the reference curve, and the trend of the swing speed and swing angle of the grab can also meet the ideal control target. The experiment shows that after controlling the motion of trolley optimized by the algorithm, the trajectory becomes smooth, avoiding the violent swing of the grab caused by the excessive local acceleration, so that the running mode of the trolley smoothly transitions to the uniform motion stage and meets the expected requirements.
Figure 10 shows the running speed curve of the trolley from the acceleration and swing-elimination stage to the discharge point. The algorithm of this study provides a smooth-running trajectory of the trolley, which not only improves the smoothness of the system operation but also effectively improves the operating efficiency of the overhead crane system.
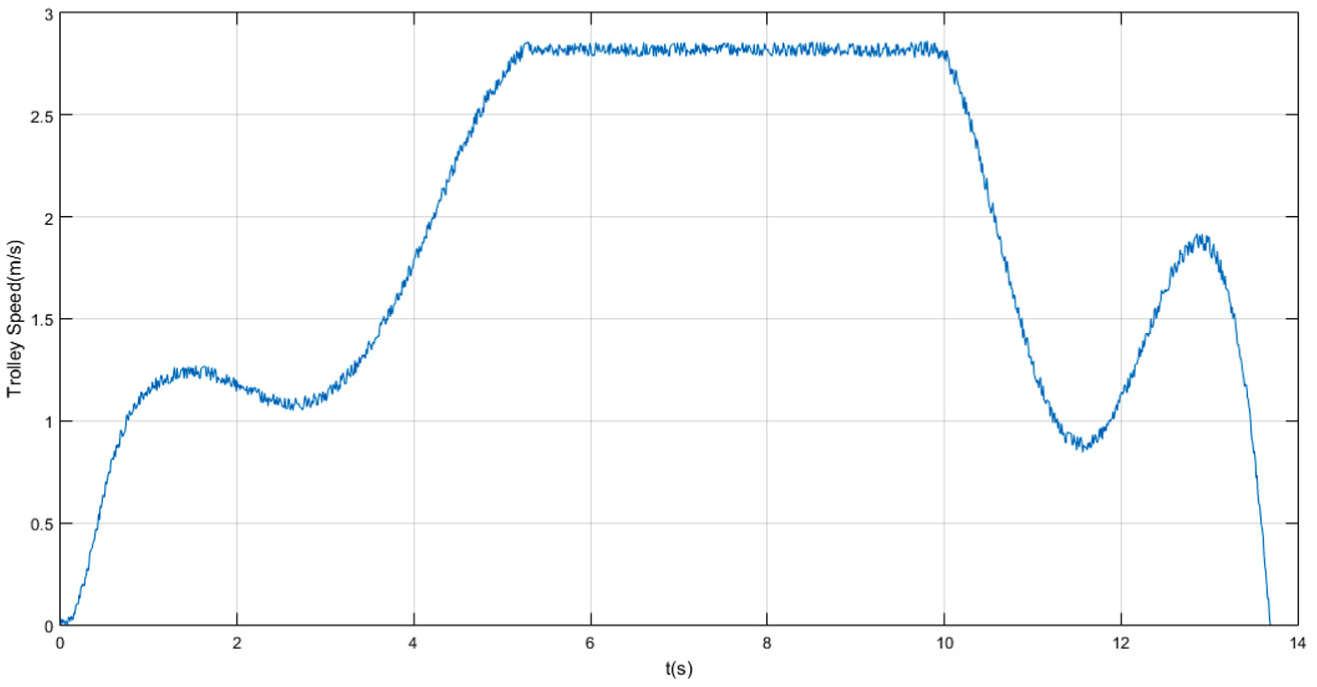
The running speed curve of the trolley from the acceleration and swing-elimination stage to the discharge point.
Conclusion
In the optimization design of the anti-swing trajectory control of the overhead crane, the HS-RBF neural network model is established. The RBF neural network is used to directly generate the trajectory of the trolley that satisfies the control index. The center value, width value, and weights of the RBF neural network are trained by the HS algorithm, and the swing of the grab is used as the fitness evaluation index when the trolley arrives at the specified time. The simulation and experiment results showed that this method fully considers the operating environment factors such as rope length change, air resistance, and wind load; generates a smooth trajectory of the trolley, which avoids the errors caused by the simplification of the model and environmental factors; and improves the smoothness and accuracy of the operation of the crane grab in the active anti-swing process.
Footnotes
Handling Editor: Seung-Bok Choi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Shanghai Research Project Funding Project (16391901700), Shanghai Engineering Technology Research Center Construction Special (17DZ2 252300) and the National Key Technology R&D Program of China (2017YFB1302004).