
Abstract
A novel energy-coupling-based control method for under-actuated double-pendulum overhead cranes with initial control force constraint is proposed in this article. The significant feature of the designed controller is its superior control performance as well as its strong robustness with respect to parameter variations and external disturbances. By incorporating a smooth hyperbolic tangent function into the control law, the proposed controller guarantees soft start of the trolley. Moreover, to improve the transient performance of the crane system, coupling behavior among the trolley movement, the hook swing, and the payload swing is enhanced by introducing a generalized payload horizontal-displacement signal. Lyapunov techniques and LaSalle’s invariance theorem are utilized to prove the stability of the designed closed-loop system. Simulation results demonstrate that the new energy-coupling control method achieves superior control performance and strong robustness over different payload masses, cable lengths, desired positions, and external disturbances with reduced initial control force.
Keywords
Introduction
Overhead cranes have been widely applied to some industrial fields, such as construction sites, harbors, and factories, for bulky cargoes transportation.1–3 Control problems for overhead crane systems attract much attention due to the under-actuated nature of overhead cranes. For overhead cranes, fast movement of the trolley inevitably induces unexpected payload swing, which reduces their efficiency and even results in a crash. 4 In the crane’s conventional mode of operation, a duty cycle is divided into three phases: payload hoisting, horizontal transportation and payload lowering,5–7 among which the most complex and difficult to control is horizontal transportation. The primary goal of horizontal transportation phase is to move the payload from its initial position to its desired position accurately while suppressing and eliminating the payload swing rapidly, so as to put down the payload steadily and vertically in the payload lowering stage. Therefore, it is of great importance to improve the transient performance such as the maximum swing amplitude and the overshoots of the trolley movement, as well as steady-state performance such as the positioning error of the trolley.
For these reasons mentioned before, it is important to design a high-performance controller for overhead cranes. Most existing control methods treat the payload swing as that of a simple pendulum. During the past decades, many methods regarding simple pendulum overhead crane have been developed, including optimal control,8–10 input shaping,11–14 trajectory planning,4,5,7,15–18 energy-based control methods,19,20 sliding mode control (SMC), 21 flatness-based inverse methods,22,23 adaptive control, 24 switching-based control, 25 fuzzy-model-based control,26–28 and neural network control. 29
The aforementioned control methods focused on the control problem for single-pendulum overhead cranes. But in many cases, the crane acts like a double pendulum, for example, in the circumstances when the hook mass is not negligible or the payload is large and distributes mass unevenly. In these cases, the overall performance of the above-mentioned controllers designed for single-pendulum overhead cranes will be attenuated. Therefore, a series of control methods are developed for two-pendulum cranes. Liu et al. 30 built the dynamic model for a double-pendulum overhead crane system with Lagrangian method and analyzed the under-actuated nature, the passivity, and its two natural frequencies of the system model. Based on this, a passivity-based controller was designed, which presented complicated structure and residual swing. By convolving the human-generated command with a sequence of impulses, the input-shaping control methods can effectively suppress the payload swing of double-pendulum overhead cranes.31–34 However, input-shaping control methods cannot eliminate external disturbances. 35 In Tuan and Lee, 36 using SMC technique, two robust controllers (continuous sliding mode control (CSMC) controller and hierarchical sliding mode control controller) were presented for both positioning and anti-swing control of double-pendulum overhead cranes. However, controllers designed in Tuan and Lee 36 were sophisticated, makes it unwieldy to implement in practice.
In this article, we derive a novel controller based on energy coupling for double-pendulum overhead cranes. Compared with most existing control methods of double-pendulum overhead cranes, the proposed controller has a simpler structure and does not contain cable-length-related terms and payload-mass-related terms, which make it robust with respect to different cable lengths and payload masses. For regulation control methods, the initial control force will become larger as the destination gets farther, which causes damage to the actuating motors. 37 Large-amplitude payload swing will be excited by the corresponding large trolley acceleration. To address above-mentioned problems, we introduce a smooth hyperbolic tangent function into the control law to guarantee soft trolley start and reduce the initial control force. First, we introduce a composite payload horizontal-displacement signal containing the information of the trolley movement, the hook swing, and the payload swing. And then, we design an energy-coupling-based controller with initial control force constraint by incorporating a smooth saturated function into the control method. By utilizing Lyapunov techniques and LaSalle’s invariant theorem, the origin of the closed-loop system is proven to be asymptotically stable. Numerical simulation is used to compare control performance of the proposed controller with passivity-based controller 30 and CSMC controller 36 and illustrates robustness of the designed controller against different internal (cable lengths, payload masses, and desired positions) and external disturbances.
In general, the main contribution of this article is given as follows.
While most existing control methods are complicated, the designed controller has a simpler structure, which is easy to apply in the engineering.
The defined generalized signal involves the trolley movement, the hook swing, and the payload swing, which increases the state coupling, resulting in an improved transient performance.
By introducing a hyperbolic tangent function into the controller, the proposed control method guarantees soft trolley start.
The proposed control law has strong robustness with respect to different payload masses, cable lengths, desired positions, and external disturbances.
This article is organized as follows. In section “Dynamic model of a double-pendulum overhead crane system,” we present the dynamic model of a double-pendulum overhead crane. Controller development and stability analysis are carried out in section “Main results.” In section “Numerical simulation and analysis,” numerical simulation results are exhibited. We conclude this article in section “Conclusion.”
Dynamic model of a double-pendulum overhead crane system
In our study, the control problem for a double-pendulum overhead crane with fixed cable length is addressed. Figure 1 shows a double-pendulum overhead crane with a suspended payload. It is made up of a trolley moving along a horizontal direction (X-direction) by applying a control force

Schematic diagram of a double-pendulum overhead crane.
With air resistance being ignored, the dynamic model of a double-pendulum overhead crane in the X-Y plane is represented by30,36

where
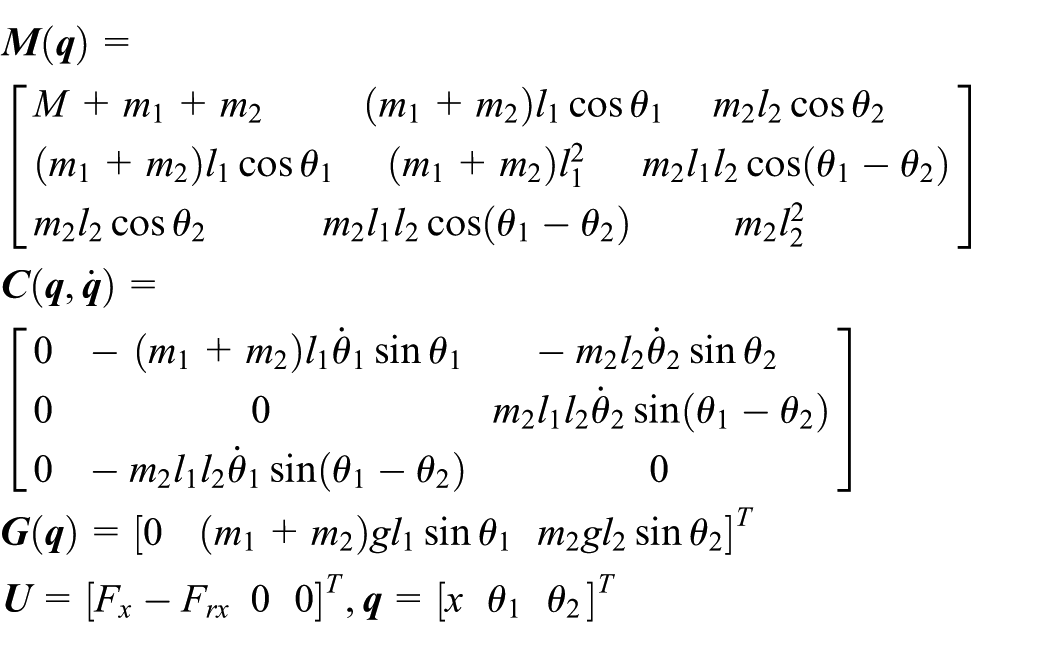
where M, m1, and m2 ∈

and the friction model (2) is inspired by Makkar et al.
38
In equation (2),
Define the resultant force imposed on the trolley as F and then

It is not difficult to verify that there exists a skew symmetric relationship between the inertial matrix

As can be seen from Figure 1, the horizontal-displacement of the payload has the following expression

which indicates that xp(t) is a natural coupling signal reflecting the trolley movement x(t), the hook swing θ1(t), and the payload swing θ2(t). Inspired by the form of equation (5), a generalized payload horizontal-displacement signal capturing x(t), θ1(t), and θ2(t) is introduced as follows

where λ1 and λ2 are yet-to-adjust parameters.
Without loss of generality, the following assumptions are made.
Assumption 1. The cable is massless and inflexible. 39 Moreover, the cable length is kept constant during a specific transportation process. 28
Assumption 2. During the overall transferring process, the payload is always beneath the trolley, 5 namely

Main results
In this section, we design a novel energy-coupling-based controller with initial control force constraint by means of analyzing the passivity characteristics of the double-pendulum overhead crane associated with a generalized payload horizontal-displacement signal. Through strict mathematic analysis, a new energy-like function is constructed. Based on this, the controller is put forward. Moreover, a smooth hyperbolic tangent function is introduced into the control scheme to reduce the initial control force and achieve soft trolley start.
Controller development
The system energy including kinetic energy and potential energy can be expressed as

By taking the derivative of equation (8) with respect to time, and substituting equation (3) into the resulting equation, one has
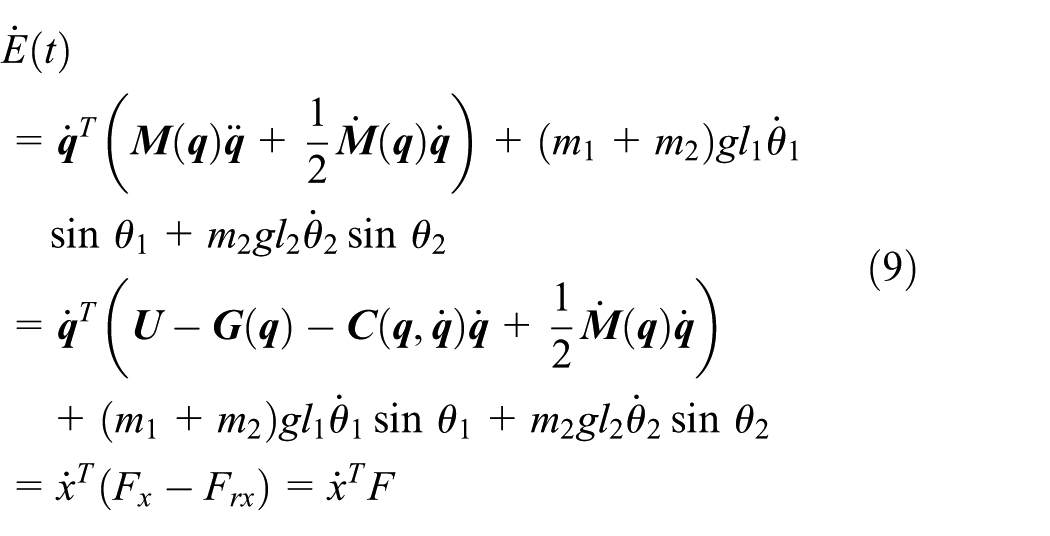
which indicates that the double-pendulum overhead crane system with input F(t) and output

where Xp is defined as equation (6). Taking the time derivative of equation (6), we are led to the following result

Substituting equations (1) and (11) into equation (10), it is straightforward to derive that
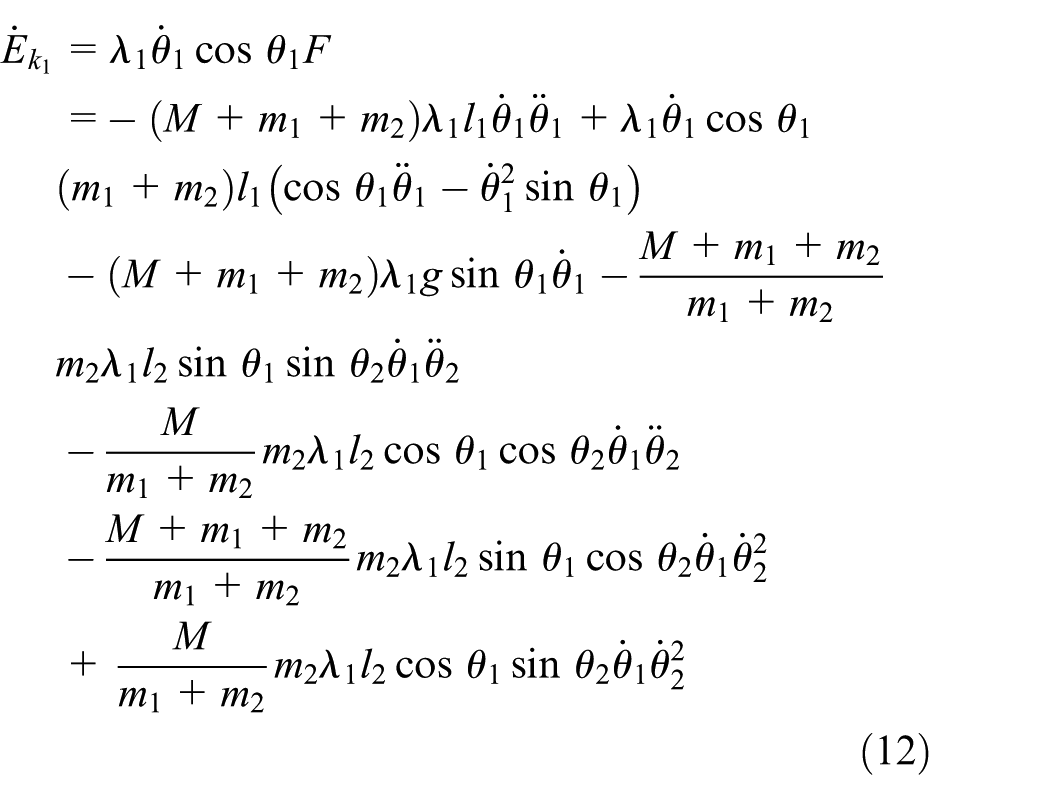
and

Therefore, in view of the structures of equations (12) and (13), the relationship between

And on this basis, equations (12) and (13) can be rewritten as
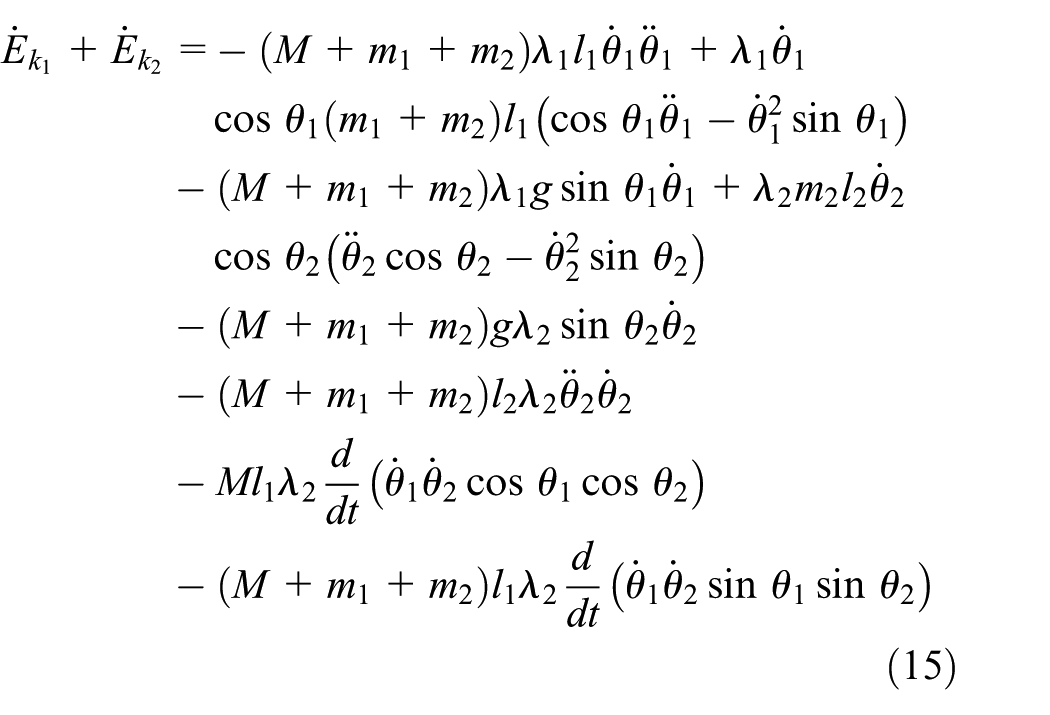
Herein, integrating equation (15) with respect to time, we have
It is easily concluded from equation (17) that whenever λ1 and λ2 < 0, one has

In accordance with equation (20) and the arithmetic geometric means inequality, one derives the following result from equation (19) that
which, together with equation (11), indicates that

To facilitate the subsequent controller development and analysis, we introduce the following generalized payload positioning error ξx as

where pd ∈

Differentiating equation (20) with regard to time leads to

Then, equation (13) can be rewritten as

Based on the structure of equation (23), we design the energy-based coupling controller with initial control force constraint as follows

where kp and kd ∈ R+ are positive control gains.
The objective of introducing the hyperbolic tangent function

the initial control force is calculated from equation (24) as

Thus, if the desired position of the trolley is far away from the initial position, that is

the proposed controller (24) can effectively lower the initial control efforts and hence achieve soft trolley start, which can reduce trolley acceleration and avoid exciting large-amplitude payload swing.
Stability analysis
As summarized by the following theorem, the designed controller (24) ensures that the system state converges to the equilibrium point asymptotically.
Theorem 1
The trolley can be driven to the desired position pd accurately, and the hook swing θ1(t) and the payload swing θ2(t) can be suppressed and eliminated rapidly by the control strategy (24) in the sense that

Remark
In practice, due to the limited trolley acceleration, the swing angles θ1(t) and θ2(t) are usually kept within 10 degrees,15,17,18,34,36 and under these circumstances, the following approximations

are valid.
Proof
To prove the above theorem, the following Lyapunov function candidate is chosen

The time derivative of equation (30), along the trajectories of equations (23) and (24), is calculated as

which implies that the designed closed-loop system is Lyapunov stable at the origin and V(t) is non-increasing; in other words, V(t) is bounded as

Hence, it can be concluded from equations (2), (11), (20), (22), (24), (30), and (32) that

To accomplish the proof, let

and define S as the largest invariant set contained in Ф. Thus, in S

It is straightforward to derive from equation (35) that

and

Substituting equations (35) and (36) into equation (24), the following equation holds

It can be obtained from equation (37) that

After some arrangements, equation (1) can be rearranged into

which, together with the conclusions of equations (14) and (40), indicates that

Suppose that α ≠ 0, it is concluded that

which contradicts with the conclusion

After substituting equation (43) into equations (38) and (41), we can obtain

In a similar way, it is obtained that

After substituting equations (29) and (44) into equation (1), equation (1) can be rewritten in the following manner



It can be obtained from equations (7), (46), and (47) that in S

the first- and second-order derivatives of which can be derived as

It can be concluded from equations (46) and (48)–(50) that

Accordingly, the following equations hold in S

Substituting equations (49) and (51) into equation (36), one has

which together with equations (45) and (49)–(52) further indicates that only the equilibrium point
Numerical simulation and analysis
In this section, some simulation tests are carried out to verify the superior performance of the proposed control method. The numerical simulation is implemented in MATLAB/Simulink. The physical parameters of the double-pendulum overhead crane system are set as follows

The initial trolley position x(0), the hook swing angle θ1(0), and the payload swing angle θ2(0) are determined as zero. The parameters for the bridge friction model are set as

The desired trolley location is set as

Contrast tests
To verify the superior performance of the proposed control scheme, we compare our controller with the passivity-based controller 30 and the CSMC controller. 36 For literature completeness, we provide the expressions of the passivity-based controller and the CSMC controller as follows.
1. Passivity-based controller

where kE, kD, kp, and kd ∈
2. CSMC controller
The dynamic model of overhead crane in this article is different from Tuan and Lee, 36 which has a damper for the trolley. Furthermore, the directions of the two angles in Figure 1 are also opposite. To be fair, the expression of the CSMC controller is rewritten as

where λ, α ∈

where
The control gains for the proposed controller, the passivity-based controller, and CSMC controller are fully tuned until the respective best performance is achieved, which are described in Table 1. Simulation results and some quantified indexes are illustrated in Figures 2–4 and Table 2. In Table 2, the following seven performance indices are included:
Maximal hook swing θ1max that denotes the maximum hook swing amplitude during the transferring process.
Maximal payload swing θ2max that denotes the maximum load swing amplitude during the transferring process.
Hook residual swing θ1res, which refers to the maximum hook swing amplitude after the trolley stops.
Payload residual swing θ2res, which refers to the maximum payload swing amplitude after the trolley stops.
Trolley final position pf.
Setting time ts that denotes the moment when θ1(t) and θ1(t) enter the ranges of
Maximum actuating force Fxmax.
Control gains.


Results for the proposed control method.

Results for the passivity-based control method. 30

Results for the CSMC control method. 36
Control performance comparison.

We can see from Table 2 and Figures 2–4 that with similar transportation time for positioning (both with 8s), the transient performance of the proposed controller is superior over that of passivity-based controller and CSMC controller, in the sense that the hook swing and the payload swing are better eliminated by the designed controller and there is almost no residual swing as the trolley stops. More precisely, the proposed control method has the smallest maximal hook swing 1.66°, the smallest maximal payload swing 1.68°, the smallest residual hook swing 0.06°, and the smallest residual payload swing 0.05°. Although settling time of CSMC controller is smaller than the proposed controller, but the maximum actuating force of the designed controller is the smallest. These simulation results directly demonstrate that the transient performance of the double-pendulum overhead crane system is improved by introducing a generalized payload horizontal-displacement signal.
Robustness verification experiment
The main purpose of this simulation study is to validate the robustness of the proposed control method against parameter variations and external disturbances. To this end, we divide our numerical simulation tests into four groups.
Simulation group 1
In this group, we plan to test the robustness of the designed controller with respect to different cable lengths. To do so, the following three cable lengths are considered:
l1 = 1 m;
l1 = 2 m;
l1 = 4m.
The control gains are kept the same as in Table 1 for all three cases. Figure 5 illustrates the simulation results. It is concluded from Figure 5 that the trolley positioning, the hook swing, and the payload swing elimination are not impacted much by different cable lengths, indicating that the designed controller is not sensitive to the uncertainties of the cable lengths.

Results for the proposed controller with respect to different cable lengths.
Simulation group 2
Next, we intend to verify the control performance of the presented control method for different payload masses, while the control gains remain the same as in Table 1. The following three payload masses are considered:
m2 = 1 kg;
m2 = 3 kg;
m2 = 5 kg.
The derived results are shown in Figure 6. For all the three cases, the trolley arrives at the desired location accurately, while the hook swing and the payload swing are suppressed and eliminated rapidly. Therefore, these simulation results demonstrate the proposed control method’s strong robustness with respect to different payload masses, which is of great benefit.

Results for the proposed controller with respect to different payload masses.
Simulation group 3
In this group, we intend to validate the proposed controller’s robustness over different desired positions, while the control gains are kept the same as in Table 1. Toward this end, the following four traveling distances are set:
pd = 1 m;
pd = 2 m;
pd = 3 m;
pd = 4 m.
The simulation results are shown in Figure 7. We can see from Figure 7 that for different desired positions, the trolley is driven to reach the destinations accurately and the payload swing and the hook swing are less than 1.7° during the whole transportation process, with no residual swing after the trolley stops. One can see that the transferring distances have little impact on the payload swing amplitude, indicating that the designed controller guarantees soft trolley start.

Results for the proposed controller with respect to different desired positions.
Simulation group 4
In this group, three kinds of disturbances are added to the payload swing to emulate external disturbances such as winds during the whole transportation process. More precisely, we add impulsive disturbances between 9 and 10 s and sinusoid disturbances between 15 and 16 s, all of the disturbances added are with an amplitude of 2°. It can be seen from Figure 8 that the external disturbances are suppressed and eliminated rapidly, which indicates the strong robustness of the proposed control method.

Results for the proposed controller with respect to different disturbances.
Conclusion
In this article, we propose an energy-coupling-based control method for double-pendulum overhead crane systems with initial control force constraint, which successfully overcomes the drawbacks of existing regulation schemes. The proposed controller has a simpler structure and achieves an improved control performance with strong robustness by enhancing the coupling behavior between the trolley motion, the hook swing, and the payload swing. In addition, in order to guarantee soft trolley start and reduce the initial control force, we introduce a smooth hyperbolic tangent function into the control law. Numerical simulation results are included to illustrate the superior control performance and strong robustness with respect to different system parameters and external disturbances of the designed controller. In our future work, we will try to perform some experimental tests.
Footnotes
Handling Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the National High-tech Research and Development (863 Program) of China under Award No. 2015AA042307; Shandong Provincial Scientific and Technological Development Foundation, China, under Award No. 2014GGX103038; Shandong Province Independent Innovation & Achievement Transformation Special Foundation, China, under Award No. 2015ZDXX0101E01; and the Fundamental Research Funds of Shandong University, China, under Award No. 2015JC027.