
Abstract
In practice, vertical load motion is always involved in overhead cranes. In this case, the cable length turns from a constant to a variable, which may induce large amplitude load swing and make it more challenging to develop an appropriate controller. Most existing control methods for varying-cable-length cranes require either linearization or approximation to the original nonlinear dynamics; moreover, the case of external load disturbances is not fully considered. Inspired by these facts, we build the model and suggest an energy-based fuzzy control method for underactuated overhead cranes with load transferring, lowering, and persistent external disturbances. To estimate the persistent external disturbances, we construct a fuzzy disturbance observer. And a strict mathematical analysis of the control method without linearization approximation is presented, providing theoretical support for the superior performance of the proposed controller. Lyapunov techniques and LaSalle’s invariance theorem are used to demonstrate the stability of the closed-loop overhead crane system. Numerical simulation results are included to examine the effectiveness and robustness of the proposed method.
Keywords
Introduction
In recent years, studies on underactuated crane systems have attracted a great deal of interests.1–5 The main purpose of controlling a crane is to drive the trolley to the target position accurately and damp out the unexpected load swing rapidly. As typical underactuated systems, overhead cranes have been widely used in harbors, construction sites, and so on for the transportation of heavy goods. Roughly speaking, the overhead crane operation process can be divided into three steps: (1) load hoisting, (2) horizontal transportation, and (3) load lowering.6–8 Due to the fact that the trolley does not move in the first step, there is almost no load swing at this stage. In the second step, the load swing is required to keep within a small range, and there should be no or small residual swing as the trolley stops to put down the load vertically and steadily for step 3. However, due to the presence of inertia and external disturbances, large load swing amplitude is always induced during and at the end of step 2. Taking the above-mentioned facts into account, we attempt to propose an effective control method for the second and third steps to position the trolley accurately while suppressing and eliminating the load swing rapidly.
In recent decades, a lot of efforts have been devoted to the anti-swing control problem of underactuated constant-cable-length cranes, and many constructive and useful results have been obtained.9–33 Roughly speaking, the control methods can be sorted as open-loop and closed-loop according to the fact whether state feedback is employed in the anti-swing control laws. 25 Open-loop control methods, including input shaping,9–12 offline motion planning, 13 and optimal control,14,15 have been proposed for overhead crane systems. Due to the presence of external disturbances, closed-loop control methods are developed to increase the system performance, including sliding-based control,16–19 adaptive fuzzy control,20–22 energy/passivity-based control (PBC),8,23–27 output feedback control, 28 nonlinear trajectory planning, 29 switching-based emergency control, 30 model predictive control, 31 nested saturation control, 32 and genetic algorithm (GA)-based stable control. 33
Nonetheless, the aforementioned control methods are oriented to constant-cable-length overhead crane systems, and their control performance will probably be degraded in the case of cable length variations. 34 Moreover, it is more challenging to design appropriate controllers for varying-cable-length cranes as the cable length turns from a constant into a variable. To achieve satisfactory control performance in the presence of cable variation, abundant efforts have been made for varying-cable-length cranes. In the work by Trabia et al., 35 by linearizing the complex crane dynamic around its equilibrium point, a fuzzy logic control method is proposed to suppress and eliminate the unexpected load swing angle. IDA-PBC (interconnection and damping assignment passivity-based control) method is successfully applied to varying-cable-length cranes, which shape the crane system energies to achieve the minimums at the desired equilibrium points. 36 By coupling the actuated trolley motion with the unactuated load swing into a sliding surface, sliding-mode-based control methods are developed for crane control subject to varying-cable-length.4,37,38 Neural-network-based frameworks are used to develop intelligent controllers for varying-cable-length cranes and compensate for uncertainties. 39 Corriga et al. 40 develop a gain-scheduling controller for a linearized varying-cable-length crane system. In the work by Le et al., 41 a nonlinear controller is proposed for an overhead crane system, in which partial feedback linearization technique is used. Garrido et al. 42 develop an input shaping–based control method with exact load gravity compensation to a three-dimensional (3D) crane. However, the aforementioned control methods for varying-cable-length cranes require either linearization or approximation. Motivated by the fact, Sun et al. 43 present a new tracking scheme 34 and an adaptive control method for cranes with lowering and horizontal transportation control.
In practice, an overhead crane is subject to various continuous disturbances including wind forces and frictions. From a control theoretical viewpoint, fuzzy logic can provide the most general design method which can suppress the external disturbance and cope with system parameter uncertainties in various types of control systems. Therefore, an energy-based fuzzy control method is proposed in this article, achieving accurate load transferring, lowering, and complete disturbances compensating while suppressing and eliminating load swing angle rapidly. Specifically, by introducing some coordinate transformations, the model for underactuated overhead cranes with load transferring, lowering, and persistent external disturbances is first established. Then, we construct a fuzzy disturbance observer to estimate the persistent external disturbances. And then, coupling behavior between the trolley movement and load swing is enhanced by introducing a composite signal, based on which an energy-based fuzzy controller is designed. Next, the origin of the closed-loop system is proven to be asymptotically stable using Lyapunov techniques and LaSalle’s invariance theorem. 44 Finally, numerical simulation results are used to verify the control performance of the proposed control method.
The main contributions of the proposed control method are summarized as follows:
The proposed control method requires no linearization or approximation operations to the original nonlinear dynamics.
The persistent external disturbances are observed precisely and compensated completely, which have significant theoretical importance to analyze the robustness of varying-cable-length cranes.
To the best of our knowledge, the mathematical model of overhead cranes with load transferring, lowering, and persistent external disturbances is first built. The new model can guarantee that the process of proving the system stability under the effect of external disturbances becomes more easier.
As will be seen from numerical simulation results, the transient performance of the designed controller is improved.
The remaining parts are as follows. In section “Modeling for underactuated overhead cranes with load transferring, lowering, and persistent external disturbances,” we construct a new model for overhead cranes with load transferring, lowering, and persistent external disturbances in the transformed coordinates. In section “Main results,” the fuzzy disturbance observer and the controller development process, the stability, and convergence analysis are presented. Section “Numerical simulation results and analysis” exhibits numerical simulation results for the proposed energy-based fuzzy control method and comparative methods. Section “Conclusion and future work” summarizes the main work of this article.
Modeling for underactuated overhead cranes with load transferring, lowering, and persistent external disturbances
Most existing models for overhead cranes take a geodetic coordinate system as the reference coordinate system, for which it is usually difficult to prove the stability of the system when persistent external disturbances exist.
45
In this article, we build a mathematical model of overhead cranes with load transferring, lowering, and persistent external disturbances. As can be seen from Figure 1, due to the action of persistent external disturbance d, the load will not be vertically stabilized, but be finally regulated with the cable forming an angle

where

Schematic illustration of an overhead crane with load transferring, lowering, and persistent external disturbances.
Using Lagrange’s method, the dynamic equations of underactuated overhead cranes with load transferring, lowering, and persistent external disturbances are provided as follows



To facilitate the subsequent controller development, we rewrite equations (2)–(4) as follows

where



The following assumptions are made for simplification of the model.
Assumption 1
Subject to the physical constraints, the load swing angle

Assumption 2
The load can be modeled as a point mass, while the stiffness of the cable can be neglected. The mass and elasticity of the cable have negligible impact on the system dynamics.
Assumption 3
The hook mass is very small, which can be ignored.
Assumption 4
The wind has little effects on the cable.
Main results
Fuzzy disturbance observer
In this section, we design a fuzzy disturbance observer to estimate the persistent external disturbance d by extending the results in the work by Kim.
46
Then, the load swing angle

The basic configuration of a fuzzy logic system consists of a fuzzifier, some fuzzy IF-THEN rules, a fuzzy inference engine, and a defuzzifier. The fuzzy inference engine uses the fuzzy IF-THEN rules to perform a mapping from an input linguistic vector

with
where
Then, the fuzzy system in equation (8) can be used to approximate the persistent external disturbance d as follows

where
Consider the following observation dynamic system
with

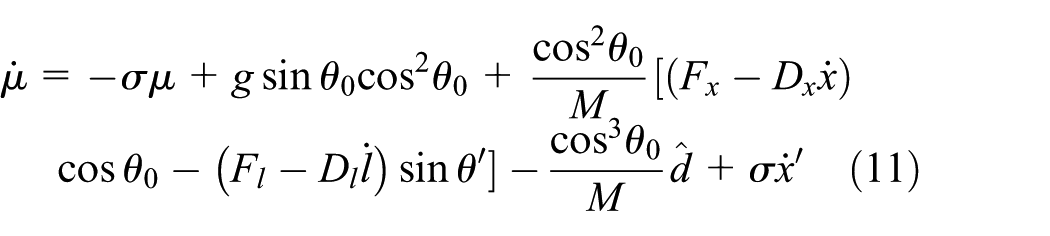
It can be obtained from equations (2)–(4) that
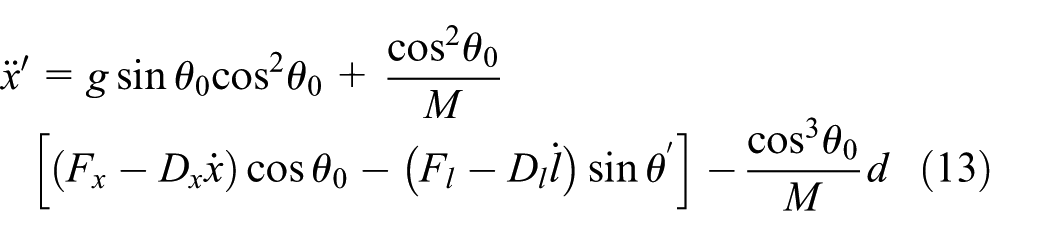
It follows from equations (11)–(13) that

Let

in a convex region

where

where

From equations (15), (17), and (18), the dynamics of the disturbance observation error is expressed as

The Lyapunov function candidate is constructed as

with
Taking the time derivative of equation (20), inserting for the results of equation (19), yields
A fuzzy rule tuning method is selected as

or, equivalently, by definition

one has
Thus,

From equation (23), under the assumption that
Energy-based controller development
The energy of the overhead crane system consists of the kinetic and potential energies as

whose derivative with respect to time can be calculated as

which indicates that the overhead crane system, with

where

and

where

From equation (5), it is calculated that

Inspired by the form of equation (26), a new energy-like function is constructed as

Taking the time derivative of equation (33), inserting the results of equation (32), it is obtained that

To guarantee the last term of

In this article, we choose

Based on the structure of equation (34), we design the energy-based control laws as follows

with
Stability analysis
Theorem 1
The proposed energy-based control laws (37) and (38) guarantee that the system state converges to the equilibrium point in the sense that

or, equivalently

where

with
As can be seen from Figure 1, the following relationships are satisfied for


Proof
To prove Theorem 1, we define the Lyapunov function candidate as

Taking the time derivative of equation (44), along with equations (34), (37), and (38), the following results are derived

which clearly indicate that the closed-loop system is Lyapunov stable at the equilibrium point. 44 It follows from equations (44) and (45) and (37) and (38) that

In order to facilitate the stability analysis, let

and then define

From equation (48), the following results can be obtained

It follows from equations (48) and (49) and (2) and (4) that



Based on Assumption 1 and equation (52), it is derived that

which, together with equations (37) and (50), indicates that

By gathering equations (38) and (51), it is clear that

It follows from equations (49) and (53) that

Thus, we can conclude that the largest invariant set
Numerical simulation results and analysis
In this section, some simulation tests are performed to validate the performance of the proposed fuzzy disturbance observer and energy-based control method. The overall simulation process is divided into three groups. More precisely, the robustness with respect to various external disturbances is tested in the first group. In the second group, the tolerance of the system to different load masses, different target load positions, and different target cable lengths is further tested. Finally, in the third group, we compare the proposed control method with the partial feedback linearization control law 41 and the nonlinear tracking control law. 34
For the simulation study, the overhead crane system parameters are set as

The initial position, velocity of the trolley, the initial length, velocity of the cable, and the initial load swing angle and angular velocity are set as

The target load position and cable length are set as

By trial and error, the observational parameter and control gains for the proposed controller are tuned as follows

The following membership functions are selected for the premise parts of the fuzzy disturbance observer

where
The numerical simulation is implemented in the environment of MATLAB/Simulink.
Simulation group 1: external disturbance robustness verification
In this group, the performance of the proposed control method in the presence of various external disturbances is tested. To this end, the persistent external disturbance d is given as shown in Figure 2.

Time history of persistent external disturbance d.
The simulation results are provided in Figure 3. As can be seen from Figure 3(a), the persistent external predictive disturbance
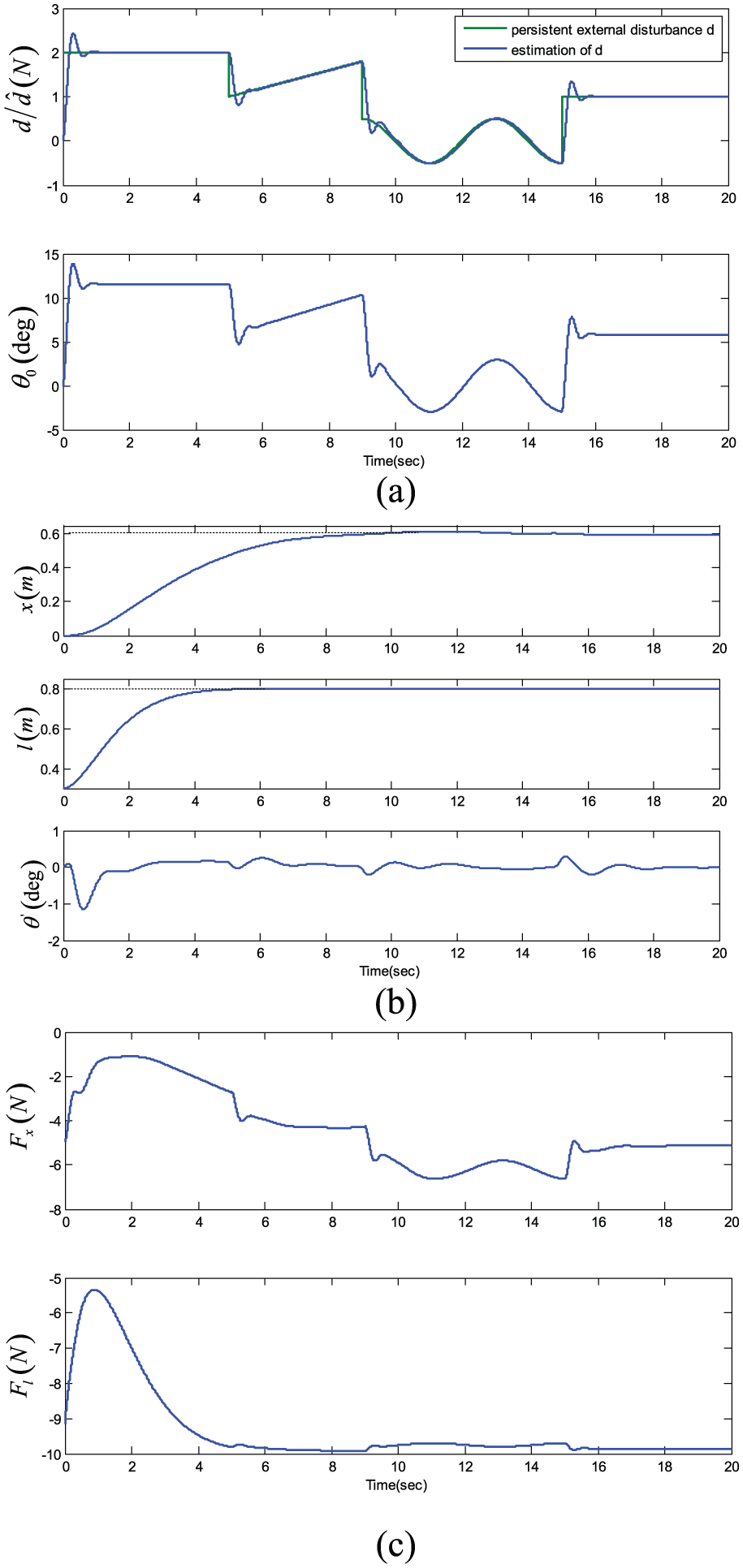
Results of simulation group 1: (a) observed persistent external disturbance and swing angle induced by persistent external disturbance, (b) trolley trajectory, cable trajectory, and load swing angle, and (c) control inputs imposed on the trolley and the load.
Simulation group 2: internal disturbance robustness verification
To verify the robustness of the proposed control method with respect to different load masses and its effectiveness for different target load positions and different target cable lengths, we examine the following three extreme cases:
Case 1. The external disturbance d is 1 N, and the load mass is changed from 1 to 5 kg abruptly at t = 5 s.
Case 2. The external disturbance d is 1 N, and the target load position is changed from 0.6 to 1.0 m abruptly at t = 8 s.
Case 3. The external disturbance d is 1 N, and the target cable length is changed from 0.8 to 1.5 m abruptly at t = 6 s.
The obtained simulation results are shown in Figures 4–6. It is evident that under different situations, the trolley reaches the target position accurately, the cable reaches the target length rapidly, and the load swing is less than 1.1° and converges to zero soon after the trolley stops. We can see from Figures 4–6 that the control performance of the proposed controller is not influenced by the sudden changes in load mass, target load position, and target cable length. This fact directly demonstrates the strong robustness of the closed-loop system with respect to different load masses, different target positions, and different cable lengths.

Results of simulation group 2. (Dotted-dashed line) No parameter variations. (Solid line) Case 1: (a) observed persistent external disturbance and swing angle induced by persistent external disturbance, (b) trolley trajectory, cable trajectory, and load swing angle, and (c) control inputs imposed on the trolley and the load.

Results of simulation group 2. (Dotted-dashed line) No parameter variations. (Solid line) Case 2: (a) observed persistent external disturbance and swing angle induced by persistent external disturbance, (b) trolley trajectory, cable trajectory, and load swing angle, and (c) control inputs imposed on the trolley and the load.

Results of simulation group 2. (Dotted-dashed line) No parameter variations. (Solid line) Case 3: (a) observed persistent external disturbance and swing angle induced by persistent external disturbance, (b) trolley trajectory, cable trajectory, and load swing angle, and (c) Control inputs imposed on the trolley and the load.
Simulation group 3: comparative study
In this case, to validate the superior performance of the proposed energy-based regulating control method, we compare it with the partial feedback linearization control method 41 and the nonlinear tracking control method. 34 It should be pointed out that the partial feedback linearization control method and the nonlinear tracking control method are designed without considering external disturbances, whose control performance cannot be guaranteed when persistent external disturbances exist. Therefore, we set the persistent external disturbance d as 0 in this case. The expressions of these controllers are as follows:
1. Partial feedback linearization control law 41


with
2. Nonlinear tracking control law 34

where
The simulation results are shown in Figures 7–9, and the quantified results are detailed in Table 1. The following seven performance indices are included in Table 1:
Trolley final position
Cable final length
Maximum load swing amplitude
Load residual swing
Consumed transportation time
Maximum actuating force imposed on the trolley
Maximum actuating force imposed on the load

Simulation group 3: results of the proposed controller: (a) trolley trajectory, cable trajectory, and load swing angle and (b) control inputs imposed on the trolley and the load.

Simulation group 3: results of the partial feedback linearization controller: (a) trolley trajectory, cable trajectory, and load swing angle and (b) control inputs imposed on the trolley and the load.

Simulation group 3: results of the nonlinear tracking controller: (a) trolley trajectory, cable trajectory, and load swing angle and (b) control inputs imposed on the trolley and the load.
Quantified results for simulation group 3.

It is concluded from Figures 7–9 and Table 1 that the consumed transportation time of the proposed control method is 7.8 s, 8 s for the partial feedback linearization controller, and 6 s for the nonlinear tracking control method, whereas the positioning and cable length errors are all less than 3 mm. The load swing angle of the proposed control method is within smaller scope (maximum amplitude: 0.99° and residual swing: 0.03°) than that of the partial feedback linearization control method (maximum amplitude: 5.7° and residual swing: 0.8°) and the nonlinear tracking control method (maximum amplitude: 3.6° and residual swing: 1.7°). Although the consumed transportation time of the proposed control method is 1.8 s longer than that of the nonlinear tracking control method, the load swing is much better suppressed and eliminated by the proposed method and there is almost no residual swing when the trolley reaches the desired position.
Conclusion and future work
In this article, we build the model and propose an energy-based fuzzy control method for underactuated overhead cranes with load transferring, lowering, and persistent external disturbances. To estimate the persistent external disturbances, a fuzzy disturbance observer is constructed. And a composite signal is introduced to improve the transient performance of the designed controller. Using Lyapunov techniques and LaSalle’s invariance theorem, the equilibrium point of the closed-loop system is proven to be asymptotically stable. Numerical simulation results are used to verify the control performance of the proposed control method in terms of accurate trolley positioning and rapid swing elimination. In our future work, we will consider trajectory planning for overhead cranes with load transferring and lowering.
Footnotes
Handling Editor: Jiahu Qin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the National High-tech Research and Development (863 Program) of China under Award No. 2015AA042307, Shandong Provincial Scientific and Technological Development Foundation, China, under Award No. 2014GGX103038, Shandong Province Independent Innovation & Achievement Transformation Special Foundation, China, under Award No. 2015ZDXX0101E01, and the Fundamental Research Funds of Shandong University, China, under Award No. 2015JC027.