
Abstract
This article performs an extensive review on condition monitoring techniques for rail vehicle dynamics. In particular, the review focuses on applications of model-based approaches for on-board condition monitoring systems. The article covers condition monitoring schemes, fault detection strategies as well as theoretical aspects of different techniques. Case studies and experimental applications are also summarized. All the mentioned issues are discussed with the goal of providing a detailed overview on condition monitoring in railway vehicle dynamics.
Keywords
Introduction
Modern railway vehicles adopt sophisticated systems to monitor the vehicle dynamic behaviour in order to identify critical conditions. The capability of feeling the health condition has induced to define this kind of vehicles as intelligent. Several techniques have been developed for monitoring specific dynamics of railway vehicles. 1 Condition monitoring is a part of the area of fault detection and isolation (FDI).2–4 Many research activities have been conducted in order to find failure of system components by examining the output measurements.5,6
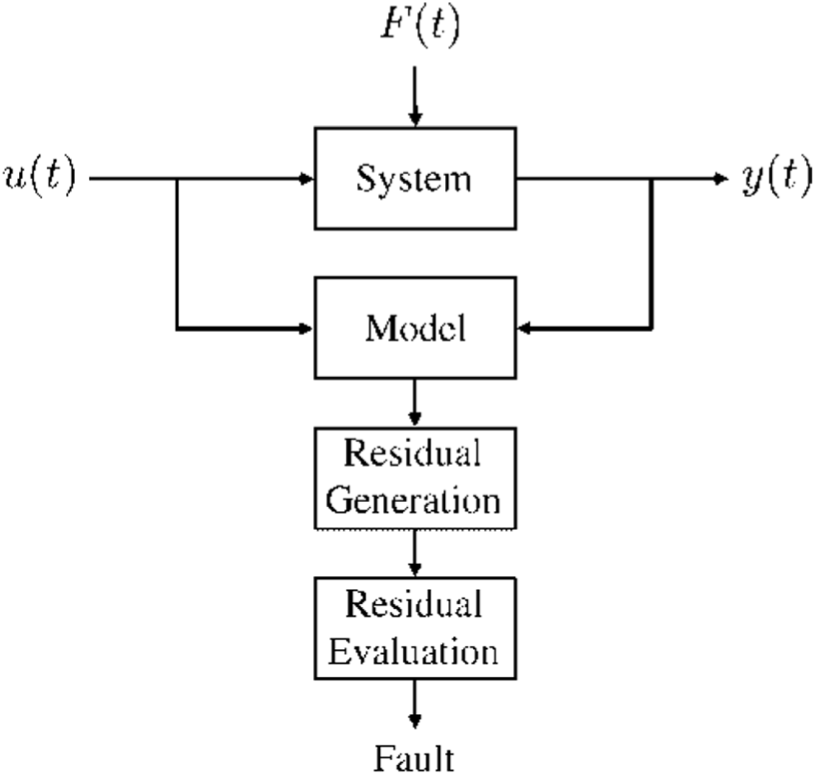
Figure 1 shows the block diagram of a generic condition monitoring system. The system input and the measured output are adopted in the condition monitoring strategy.

Block diagram of a generic condition monitoring scheme. 5
Condition monitoring approaches can be classified into three main groups:
Signal processing methods;
Knowledge-based methods;
Model-based methods.
The main purpose of signal processing methods is to find the distinction between faulty and fault free cases from the system response signals without a mathematical model in the fault detection process. In signal processing methods, measured signals can be analysed in frequency domain, in time domain or in time–frequency domain. Moreover, the measured signal can be processed by means of bandpass filters, spectral analysis and wavelet method.2,7,8 For example, filters are useful to extract fault-relevant information from vibrational measurements. Phase differences between rotational and translational motions are employed in Kojima and Sugahara 9 in order to detect faults of suspension elements. In Mei and Ding, 10 a multi-block partial least squares approach is applied to build the statistical model using the historical normal operating data. In Mei and Ding, 11 a novel class of stochastic ARX-type models capable of representing a faulty state of vehicle is presented.
Knowledge-based methods are based on the heuristic knowledge of the FDI procedure. 12 In a knowledge-based FDI, an analytical system model is unnecessary because the method adopts only the information extracted from the system outputs. In this way, only an empirical system knowledge is used and the FDI is obtained in a heuristic manner. In Scanlan and O’Leary 13 and Zhao and Xu, 14 knowledge-based techniques have been presented where fuzzy logic procedures have been adopted to map the inputs and the outputs of the dynamical systems.
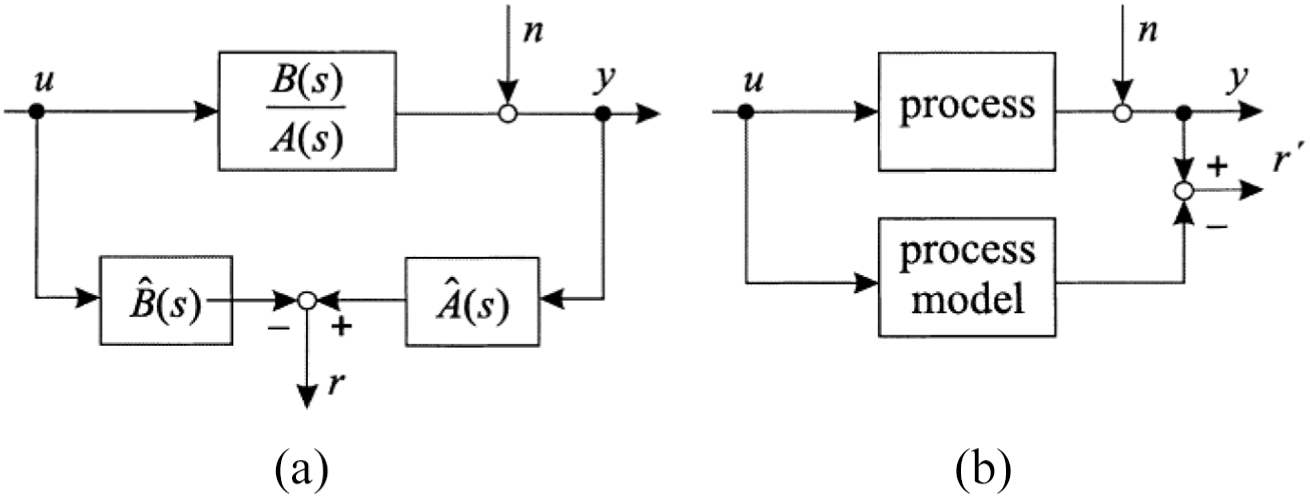
Model-based approaches rely on the idea of analytical redundancy and they are based on the comparison between the system available measurements with a priori information represented by the system mathematical model. Figure 2 shows an example of process model-based and signal-based FDI. 15

An example of process model-based and signal-based FDI. 15
This review provides an overview of the existing model-based condition monitoring techniques in railway vehicle dynamics. Section ‘Model-based estimation techniques’ presents on-board model-based techniques used to estimate the dynamics of the railway vehicles. Section ‘Applications of on-board condition monitoring techniques in railway dynamics’ describes some applications of model-based condition monitoring systems.
Model-based estimation techniques
Model-based methodologies are useful when the mathematical relationship between the input and output signals of a dynamical system is known. 15 The model-based approaches identify faults in the systems through the evaluation of residuals 2 (see Figure 3).
Residual evaluation in a model-based FDI system. 2
The residuals capture the differences between the actual system and the model. Consequently, the residual deviations from zero can be used for fault detection.
Model-based methods are classified into three main methods:
Parameter estimation method;
Parity equation method;
State observer method.
The parameter estimation method focuses on the behaviour of system parameters related to the system model and the measurements. Parameter estimation can be adopted as FDI if a fault in the monitored system is related to the variations of specific parameters.
In this case, the differences between nominal parameters and their estimation represent the residuals. Figure 4 shows two types of parameter estimation: method based on equation error and method based on output error. 2

Parameter estimation for FDI: (a) equation error method and (b) output error method. 2
The parity equation method requires a fixed state model, which is used as the reference system for the measurements. In the parity equation method, a parity vector is given in order to map inconsistency in the system measurements.16,17
Figure 5 shows two basic approaches, the output error method and the equation error method. 15
Parity equation for FDI: (a) equation error method and (b) output error methods. 15
Parity equations do not need permanent excitation and require less computational effort than parameter estimation, but do not give the same deep insight into the process as parameter estimation. In Isermann, 15 a combination of parameter estimation and parity equations is proposed (see Figure 6). More specifically, in the scheme of Figure 6, parity equations are used during normal operation to detect any fault fast; then, parameter estimation can be applied to deepen the information for fault detection and diagnosis.

A combination of parameter estimation and parity equations for FDI. 15
The state observer method in FDI is probably the most adopted approach among the model-based condition monitoring methods. In the state observer method, residuals are obtained by comparing the estimated outputs with the actual measurements (see Figure 7). 2

State observer fault detection method. 2
In the following paragraphs, several methods adopted for model-based condition monitoring are described.
Kalman filter
RE Kalman 18 presented the recursive solution to the discrete linear filtering problem. The Kalman filter is useful to estimate the system state when only a subset of the state is measured. The dynamical model of the system is included in the filter design, which has to be sufficiently detailed in order to take into account the dynamics of all the system parts to be estimated. Figure 8 shows a block diagram of the Kalman filter and its application. 5
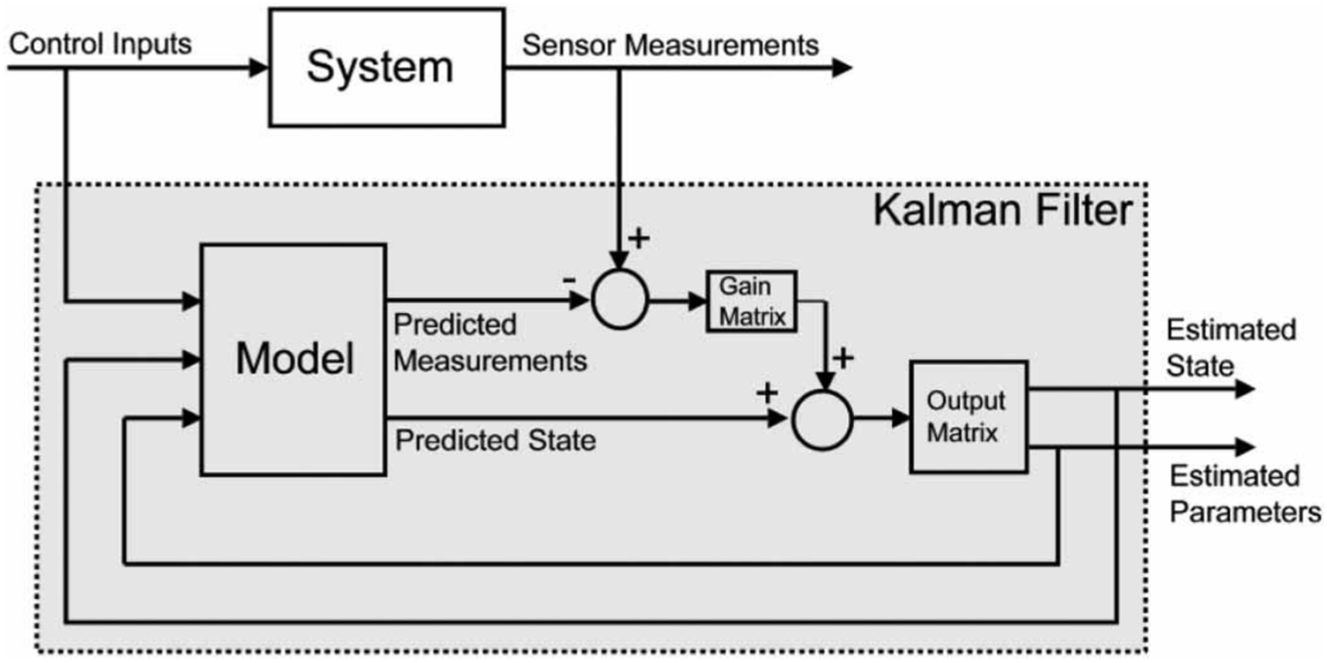
A block diagram of the Kalman filter approach. 5
The mathematical model, in the scheme of Figure 8, is used to predict the system state and the measurements from the control inputs. The Kalman filter can also be used to estimate parameters including the unknown parameters in an augmented state vector. In this way, the new mathematical system model, adopted in the filter, becomes nonlinear. The extended Kalman filter (EKF) and the unscented Kalman filter (UKF) allow applications to a nonlinear problem.19–21 The UKF is easier to implement in the practice as no analytical derivatives need to be calculated.
Particle filter (sequential Monte Carlo)
Starting from the paper of Gordon et al., 22 the particle filter (PF) (also known as Monte Carlo filter) is a method for nonlinear non-Gaussian state estimation. The PF is developed in the framework of recursive Bayesian estimation which attempt to approximate the complete probability density function (PDF) of the state and not only the first few central moments of it such as in EKF. The drawback of the PF is that the computational effort increases with the number of particles.
Rao-Blackwellised PF
One of the major drawbacks of the PF is that a large number of samples are needed to represent the required PDF. 23 A standard technique to increase the efficiency of sampling techniques is to reduce the size of the augmented state space by marginalizing out some of the variables analytically; this is an example of the techniques called Rao-Blackwellisation. Combining this technique with the above PF results in Rao-Blackwellised particle filter (RBPF).24,25 RBPF has been applied for state estimation of the jump Markov linear systems in Doucet et al. 26 and a hybrid filter is obtained where a part of the calculations is realized analytically and the other part using Monte Carlo methods.
Least-square approach
The recursive least square (RLS) is a time-domain filter adopted to recursively estimate unknown parameters. 27 RLS is suitable in the case of highly correlated signals 28 and it is capable of identifying parameters from the input and the output variables within a noisy system. Some drawbacks have to be considered if the data are not normally distributed.
Multiple-model approach
The multiple-model approach can be adopted if the monitored system can be mathematically described with a finite number of models. 29 This method can be used in the case of system structure variation and/or modifications of system parameters. Figure 9 illustrates the basic concept of the multiple-model approach. 29 The overall system model-based estimation can be obtained using each model-based filter and mode probability.

Multiple-model approach. 29
An evolved version of the multiple-model approach is the interacting multiple-model (IMM) method.30–33 In Hayashi et al., 30 the authors proposed the IMM where the mode probabilities and states of a railway vehicle suspension are estimated based on the Kalman filter (see Figure 10).

Block diagram of an interacting multiple-model estimator. 30
It is important to note that the IMM approach provides the most efficient way to detect mode changes among several multiple-model approaches.
Applications of on-board condition monitoring techniques in railway dynamics
Ngigi et al. 34 presented wider opportunities for model-based methods for parameter and/or estimation for fault detection on-board a railway vehicle. For instance, model-based approaches have been often adopted for suspension condition monitoring and wheel/rail condition monitoring. In the following paragraphs, several case studies are illustrated and collected on the basis of the specific problem.
Suspension condition monitoring
Currently, condition monitoring strategies related to suspensions focus on the combination of signal processing and model-based assessments. In Goda and Goodall, 1 suspension faults with a Kalman–Bucy filter approach is proposed. Tsunashima and Mori 33 adopted the IMM method for detecting faults of lateral damper in secondary suspension from the measured lateral accelerations of the bogie and the body and from the yaw rate of the bogie. Figure 11 illustrates the concept of fault detection of vehicle components presented in Tsunashima and Mori. 33

FDI of vehicle components using the IMM approach. 33
In Li et al., 35 the RBPF technique is adopted for the estimation of the damping coefficients of lateral and yaw dampers in a railway vehicle secondary suspension. In Alfi et al., 36 a condition monitoring system, based on the EKF, is proposed for parameter identification applied to the lateral suspensions of the ETR500 train. In Mori and Tsunashima, 37 the IMM method is used to monitor faults in the lateral and yaw dampers of a bogie. The proposed method includes Kalman state estimators, representing different failure modes, and a mode filter adopted to identify the mode probability.
The multiple-model approach has been proposed in Hayashi et al. 38 to detect suspension failure. The adopted railway vehicle model is schematically shown in Figure 12 and it includes the lateral and yaw motions of the wheelsets, the lateral and yaw motions of the bogie and the lateral motion of the vehicle body.

Railway vehicle model adopted in Hayashi et al. 38
In Jesussek and Ellermann, 39 a hybrid EKF is developed in order to isolate the faults occurring in lateral suspensions. Fault isolation issue for different component faults occurring in the suspension system has been analysed in Wei et al. 40 The proposed method has been validated by means of simulations in SIMPACK 40 (see Figure 13).
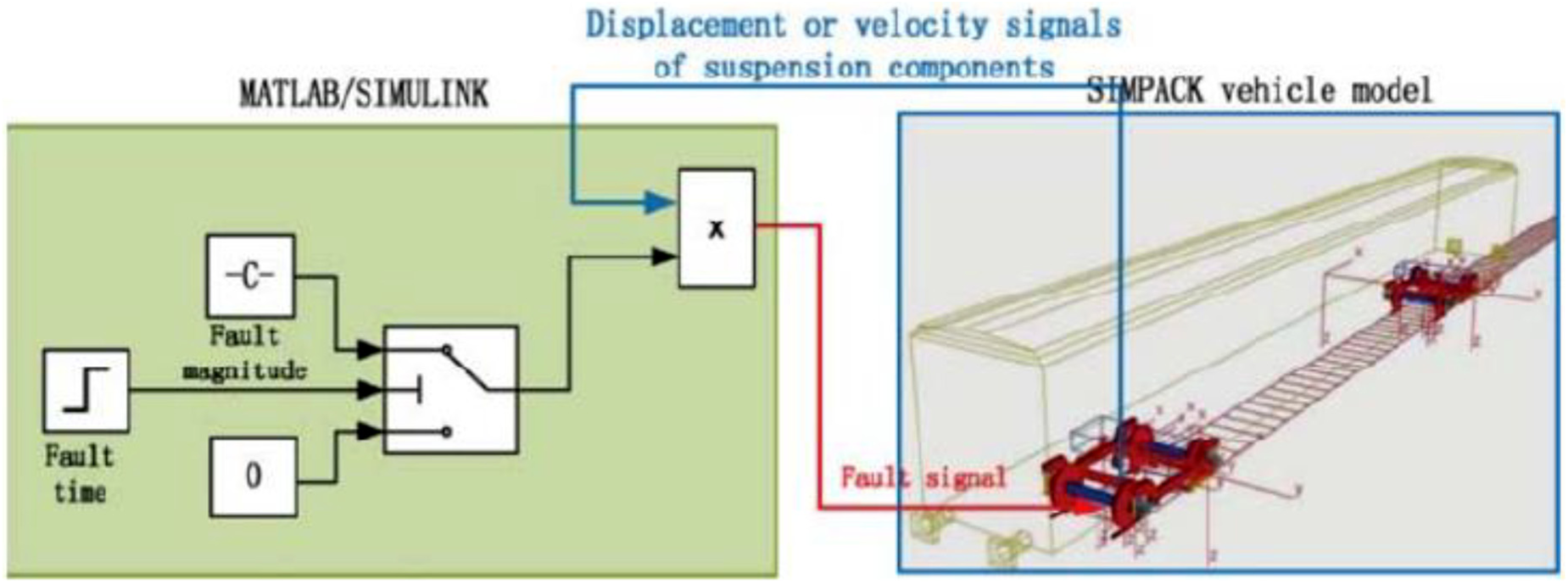
Vehicle suspension fault simulation in SIMPACK and MATLAB co-simulation environment. 40
Jesussek and Ellermann 41 proposed a multiple Kalman filter in order to detect faults in the suspension system of the vehicle. A full-scale train model, with nonlinear wheel-rail contact and nonlinear suspension forces, has been developed for the described techniques. In particular, Figure 14 shows the suspension structure of the bogies, the position of the three dampers, the anti-yaw damper, the secondary lateral damper and the secondary vertical damper, which are used for the fault detection. 41

Suspension structure of the bogies adopted for FDI in Jesussek and Ellermann. 41
In Xue et al., 42 the vehicle faults are estimated and diagnosed by introducing wavelet transform, based on the state-space method. The proposed method monitors the state of railway vehicle suspension system by establishing a vertical dynamic state-space model of railway-vehicle system to identify the parameters of vehicle suspension system. Onat et al. 43 presented the use of linear Kalman filtering scheme to identify vertical secondary suspension of a railway vehicle using the vertical vibrations of the vehicle due to vertical track irregularities.
A model-based condition monitoring strategy for the railway vehicle suspension is proposed in Liu et al. 28 by adopting an RLS algorithm.
Wheel/rail condition monitoring
The dynamic behaviour of a railway vehicle is strictly related to the interaction between the wheel and the rail profiles. This dynamic interaction is nonlinear and it depends on the complex wheel/rail contact mechanism. In the following, many research activities, related to wheel/rail condition monitoring systems, are presented.
A Kalman filter approach suitable to estimate a nonlinear conicity function is presented in Charles et al. 44 Charles et al. 45 proposed a least-square approach to identify a piecewise cubic conicity function. A simplified model with a plan-view wheelset and a suspended mass has been adopted for the proposed technique 45 (see Figure 15).

Diagram of the wheelset and suspended mass simplified railway vehicle model adopted in Charles et al. 45
Estimation of low adhesion, using the Kalman filter approach, has been presented in Charles and Goodall. 46
The Kalman filter approach has also been adopted for parameter estimation of creep force47,48 and creep coefficients. 49 In Ward et al., 47 a real-time system useful to detect local adhesion conditions and to predict wear in the wheel/rail contact has been proposed. Four levels of adhesion have been defined in Ward et al. 47 as dry, wet, low and very low conditions (see Figure 16).

Creep curves for varying adhesion conditions simulated in Ward et al. 47
The proposed condition monitoring scheme in Hussain and Mei 49 is a set of Kalman filters, based on a linearized wheelset models, that describes different characteristics of typical creep/slip curves. Identification of the operating condition of the wheelset at the interface with the rail has been achieved by adopting normalized RMS values from the residual of each filter (Figure 17).
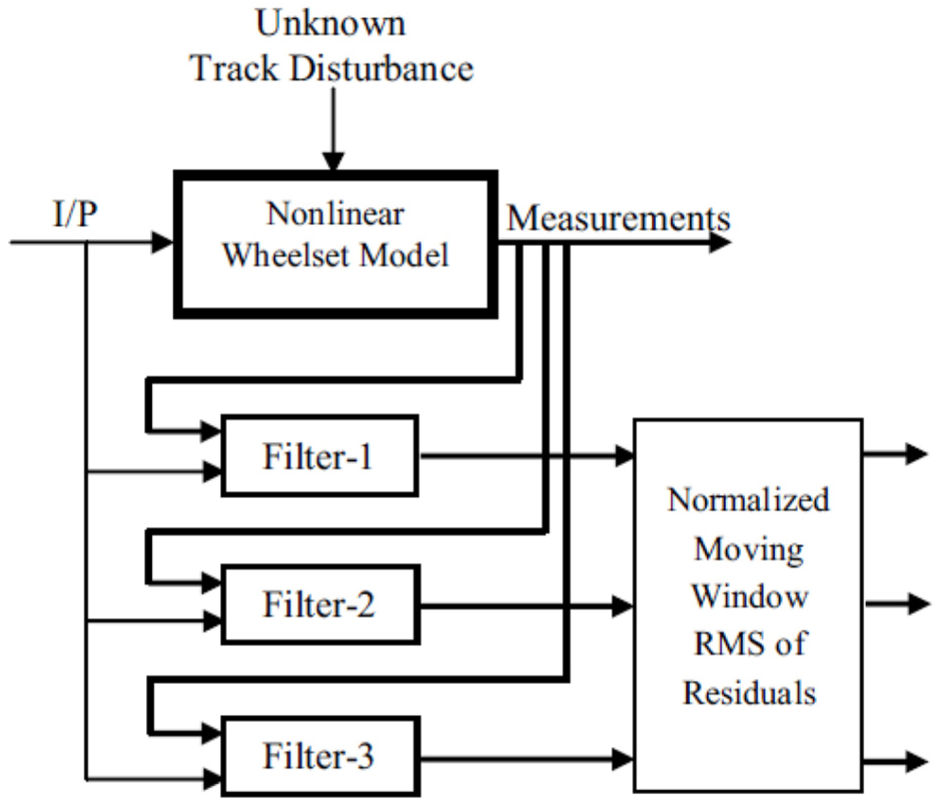
Contact condition estimation scheme presented in Hussain and Mei. 49
Condition monitoring applied to wheel-rail interface is also particularly useful for derailment prevention. For instance, Xia et al. 50 investigated the dangerous running conditions by adopting a model-based method in order to estimate the ratio of lateral over vertical wheel–rail contact forces and the ratio of the dynamic over quasi-static vertical load.
Non-contact gap sensors have been adopted in the study presented by Matsumoto et al. 51 for monitoring contact force, friction coefficient and derailment coefficient.
Condition monitoring systems based on bogie vibrations excited by derailment have been proposed in Boronenko et al. 52 and Hubacher and Scheiber. 53 A technique, based on nonlinear Kalman filters, for the real-time estimation of the wheel-rail contact forces, taking into account nonlinearities of the interaction, has been presented in Strano and Terzo. 54 In Hubbard et al., 55 a model-based estimation technique, previously developed in straight track, has been extended for operating in a curving scenario. Model-based methods for the identification of geometric track irregularities from acceleration measurements, taken on-board vehicles travelling on the track, have been presented in De Rosa et al. 56 Obrien et al. 57 presented the experimental validation of a method developed to find track longitudinal profile from measured vehicle inertial responses.
Conclusion
The condition monitoring of railway vehicles has traditionally relied on signal processing and knowledge-based techniques but, on the other hand, modelling techniques give great potentials due to the a priori knowledge included in the model. This review reports the literature related to the utilization of model-based methods for on-board condition monitoring in railway vehicle dynamics. The review has been organized into three sections that address specific issues: general concepts of condition monitoring methods and fault detection, the main model-based approaches adopted in railway vehicle dynamics and several case studies. Section ‘Introduction’ described three main condition monitoring approaches: signal processing methods, knowledge-based methods and model-based methods. Section ‘Model-based estimation techniques’ presented algorithms suitable for model-based condition monitoring. Several applications of fault detection and condition monitoring in railway dynamics have been summarized in section ‘Applications of on-board condition monitoring techniques in railway dynamics’ and they have been collected in two main categories: suspension condition monitoring and wheel/rail condition monitoring.
Footnotes
Handling Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.