
Abstract
This article establishes an axial contact stiffness model of position preloaded ball screw mechanism based on Hertz contact theory. The analysis of dynamic axial contact stiffness is one of the foundations of the research on the dynamic characteristic of the ball screw feed drive system. The model takes into account the coupling relationship between the contact angle and the normal contact force, as well as the coupling relationship between the elastic deformation and the contact deformation coefficient. The static and dynamic axial contact stiffness characteristics of the preloaded ball screw mechanism are studied. The numerical analysis result shows that the static contact stiffness of the preloaded ball screw mechanism increases with the increase in the preload and decreases with the increase in the axial load. The dynamic contact stiffness of the preloaded ball screw mechanism increases with the increase in the screw’s rotational speed. The variation range of dynamic contact stiffness increases with the increase in axial load under the same preload. And the variation range of dynamic contact stiffness decreases with the increase in preload under the same axial load. The axial contact stiffness model established in this article can be used to analyze either static or dynamic contact stiffness of position preloaded ball screw mechanism.
Keywords
Introduction
Ball screws play a significant role in converting rotary motion into linear motion to carry medium/high loads, which are most frequently used for computer numerical control (CNC) machining equipment. 1 The most important advantages of the mechanism are its good positional accuracy and high driving speeds. In recent years, with the growth of demand for high precision, high speed, and high durability in CNC machine tools, high performance and reliability have become the most important indexes for ball screws.2–4
In order to eliminate backlash and improve the contact stiffness of the ball screw system, preloaded double-nut structure is usually adopted. The preloading method of double-nut ball screw system can mainly be divided into two categories: constant-pressure preload and position preload. Constant-pressure preload is mainly through the addition of springs between two nuts to produce an axial elastic tension force, through which the double-nut ball screw system is preloaded. Positioning preload is widely used at present, with its aim to increase the axial relative displacement between the two nuts by adding a rigid gasket between the two nuts to generate an axial preload. The adjustment of preload is accomplished using gaskets with different thickness. And the required stiffness can be obtained by setting different levels of preload. 5
According to the technique information of the ball screws, 6 the ball nut stiffness can be expressed as a function of the preload level and dynamic load rating. Feng and Pan 7 took the nut stiffness as a variable, established the lumped parameter model of the preload adjustable feed drive system, and analyzed the dynamic characteristic of the ball screw under different preload settings. However, the effect of external axial load and screw’s revolution speed on ball nut stiffness was not taken into account in their study. Chung and Park 8 studied the axial deformation of the nut relative to the screw due to the contact deformation within the ball screw mechanism under different levels of preload and loading conditions. It was confirmed in their study that the ball nut stiffness depends upon ball screw’s groove geometry, as well as ball, nut and shaft dimensions, and loading conditions. But the influence of the gyroscopic moment and centrifugal force acting on the ball on ball nut stiffness under a high revolution speed of the screw was not analyzed in their study. There is a lack of literature discussing the dynamic axial contact stiffness characteristics of the preloaded ball screw mechanism under different operating conditions.
In order to investigate the dynamic contact stiffness characteristics of the ball screw, the kinematics and dynamic analysis of the ball screw should be carried out first. Wei and Lin 9 conducted the kinematics and dynamics analysis of a single-nut single-cycle ball screw mechanism under different operating conditions. They evaluated the effects of different operating conditions on the parameters such as contact angle, normal contact deformation, and normal contact force formed at two contact areas in their study. Since the theoretical analysis was developed for a single-nut single-cycle ball screw mechanism, no preload effect on the parameters formed at contact areas was discussed in the study. In the study of Wei and colleagues,10,11 theories for kinematics and dynamics of a signal-nut, double-cycle ball screw under different operating conditions were developed. It was confirmed in their study that the behaviors of the contact angle, normal contact deformation, and normal contact force demonstrated at the left ball-nut are quite different from those demonstrated at the right ball-nut contact point. The analysis of force balances at the contact areas, however, only took into account the frictional force, the normal contact force, and the axial load, and the influence of the gyroscopic moment and centrifugal force was not included in their developed theories. The high-speed ball screw not only bears axial load but also produces great gyroscopic moment and centrifugal force. Compared with the low-speed ball screw, dynamic parameters such as internal dynamic load and dynamic deformation have changed significantly. Therefore, the effect of the preload, gyroscopic moment, and centrifugal force will be considered in the model established in this article.
This article aims to establish an axial contact stiffness model to analyze either static or dynamic stiffness of position preloaded ball screw mechanism. The analysis of dynamic axial contact stiffness is one of the foundations of the research on the dynamic characteristic of the ball screw feed drive system, since the dynamic axial contact stiffness is an important parameter of the dynamic model of the ball screw feed drive system. This article analyzes the balance between the axial external load, centrifugal force, gyroscopic moment, and normal contact force of the position preload ball screw mechanism, as well as the relationship between normal contact deformation and axial displacement of nut relative to the screw. Considering the change of geometric parameters of ball, nut, and screw raceway, this article establishes the axial contact stiffness model of position preloaded ball screw mechanism on the base of Hertz contact theory. The model takes the coupling relationship between the contact angle and the normal contact force into account, as well as the coupling relationship between the elastic deformation and the contact deformation coefficient. Numerical analysis method is used to analyze the static and dynamic axial contact stiffness characteristics of the preloaded ball screw mechanism.
Theoretical analysis
In applications, the position preloaded ball screw mechanism is a closed system consisting of screw, nuts, gasket, and balls, and the nuts linearly move in the Z-axis driven by a rotational screw. In the study of the kinematics and dynamics of the position preloaded ball screw mechanism, the global coordinate system and Frenet–Serret coordinate system are first set, as shown in Figure 1. The global coordinate system OXYZ is fixed in space with its Z-axis coincident with the axis of the screw. The Frenet–Serret coordinate system

Schematic diagram of internal contact state of position preloaded ball screw mechanism.
In the position preloaded ball screw mechanism, the left nut and the right are preloaded by a gasket, since the axial loads are applied to the left and right nut symmetrically with respect to the screw axis, the kinematics and dynamics analysis of the position preloaded ball screw mechanism can be made for one pair of balls, the left ball in the left nut, and the right ball in the right nut, as shown in Figure 1. The model is based on the hypothesis that all the balls in the same nut are assumed to be under the same loading conditions, while the real case is that the ball contact forces decrease as the distance from the gasket increases.
13
In Figure 1,
Calculations of revolution and spinning angular velocities
Figure 2(a) shows the schematic diagram of the left and right balls in contact with the left and right nuts, respectively; Figure 2(b) shows the schematic diagram of the left and right ball in contact with the screw. The angular velocity of the left nut relative to the left ball is defined to be

(a) Left ball-nut contact, (b) right ball-nut contact, (c) left ball-screw contact, and (d) right ball-screw contact.
In Lin et al.’s study,
14
there is a pure-rolling point at the contact area formed between the ball and the raceway of screw or nut. This point is not necessarily the center of the contact ellipse, but very close to this center. Since the elastic deformation created at the pure-rolling point is negligibly small compared with the radius of a ball without deformation, and furthermore, the pure-rolling point has deviated only a very small distance from the center of the elliptical contact area, the distance between the pure-rolling point and the ball center is usually assumed to be the radius of a ball


where
According to the outer raceway control theory, it is known that the motion of a ball relative to the right nut is pure rolling without spinning at pure-rolling point C. Therefore, the spinning angular velocity of the ball and the right nut at point C must be equal. As Figure 2(b) shows, the equivalences are given as

Wei and Lin
9
analyzed the right ball’s revolution and spinning angular velocities but did not give the left ball’s revolution and spinning angular velocities. If the angular velocity of the left nut relative to a moving and rotating ball is defined to be


where



It must be mentioned that the gyroscopic angle
Substituting equations (6b) and (6c) into equation (4) gives

Similarly, if the angular velocity of the rotating screw relative to the ball is defined to be
where

As analyzed by Wei and Lin,
9
the relationship between the angular velocity of the left nut


Defining

Substituting equations (6b), (6c), and (7) into equation (5) gives

According to equation (2), gyroscopic angle

Contact angle
Figure 3 shows the position relationship among the ball center, screw, and nut raceway curvature centers in the n1-b1 plane. The n1-axis is parallel to the n-axis, the b1-axis is parallel to the b-axis, and the origin of the coordinate is located at

The positions of the ball center, screw, and nut raceway curvature centers.
For the convenience of analysis, the curvature center of the nut





where
The solutions for contact angles
Analysis of force balances at the contact areas
Figure 4 shows the force analysis diagram of a pair of balls (left ball and right ball) which contact with the left nut and the right nut.


where


where

Force analysis diagram of a pair of balls (left ball and right ball).
The force balance equations of the right ball in the b- and n-directions are given as


where


The force balance equations of the left nut and the right nut in the b-direction are given as


where

Under the action of the preload


where
It is assumed that the gasket that makes the left and the right nuts preloaded is rigid, without deformation. Since the left and right nut of the ball screw are moved synchronously along the axial direction when the axial load is applied, the axial displacements of the left and right nuts relative to the screw should be equal. In other words, the increment of

where
Contact deformation coefficient
The normal force

where
According to the Hertz contact theory, the contact deformation coefficient

where




where




The value of
Then, the eccentricity
According to the theory of Johnson, the deformation

where
The elastic deformation
Results and discussion
Flow chart of numerical analyses
The flow chart exhibited in Figure 5 is presented to illustrate how all variables about contact deformation at the ball-screw and the ball-nut contact areas within a position preloaded ball screw system are obtained by numerical analyses from the satisfaction of the convergence criterion. In the consideration of the coupling relationship between the contact angle and the normal contact force, as well as the coupling relationship between the elastic deformation and the contact deformation coefficient, the calculation process of the model takes gyroscopic angle
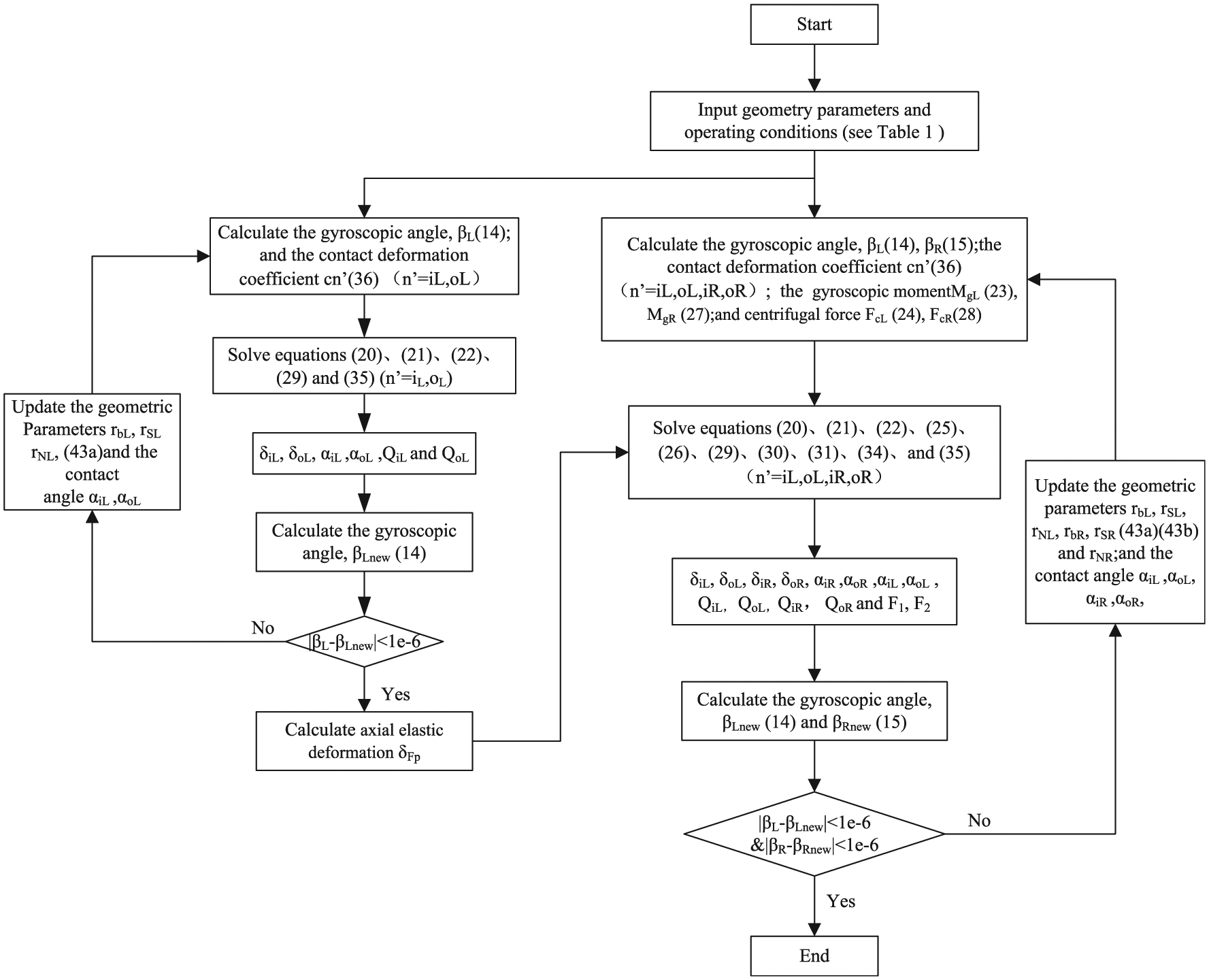
Flow chart of the numerical analysis in the present model.
List of the parameters used in the present analyses.

Axial deformation of nut under the axial load
The axial deformations of single-nut and double-nut ball screw mechanism in the static state can be obtained according to the flow chart shown in Figure 5. The axial deformation of single-nut ball screw mechanism increases with the axial force, and the speed of increase gradually slows down, as shown in Figure 6. For the position preloaded ball screw mechanism, the left and right nuts move synchronously and axially under an axial load. That makes the axial force applied on the left nut decrease and the axial force applied on the right nut increase. Figure 7 illustrates the law that the axial deformation of the position preloaded ball screw mechanism varies with the axial load under different preload. It can be found that the pressure between the left nut and the screw is reduced to zero when the axial load reaches a critical value. For example, if the preload between the left and right nut is 940 N, when the axial load reaches the critical load 2685 N, the pressure between the left nut and the screw will be reduced to zero. If the axial load continues to increase, the left nut is separated from the raceway of the screw, and the pressure between the right nut and the screw continues to increase. Meanwhile, the double-nut loading turns to the single-nut loading. This is an undesirable operation that results in sudden changes in contact conditions, which may lead to film breakage and excessive wear. In order to avoid this mode of operation, the value of preload is usually set to be able to withstand the axial load while still maintaining a certain contact pressure on the balls. 5 It can also be found that the critical load increases with the increase in the preload.

Axial deformation of the single-nut ball screw mechanism under the axial load.

Axial deformation of the position preloaded ball screw mechanism under the axial load.
Increment of the preload
Figure 8 illustrates the law that the preload increment arising in the position preloaded ball screw mechanism varies with the screw’s rotational speed under no axial load. The centrifugal force and gyroscopic moment acting on the ball increase with the increase in the screw’s rotational speed, as shown in equations (23) and (24). Under the action of the centrifugal force and gyroscopic moment, a certain amount of elastic recovery will be produced between the screw and either the left nut or the right nut. However, the rigid gasket between the left and right nuts will prevent this elastic recovery behavior. Therefore, the preload between the left and right nuts will be increased, as shown in Figure 8. It can also be found that the increment of preload increases with the increase in the initial preload.

Increment of the preload in position preloaded ball screw mechanism.
Axial static contact stiffness of ball screw
Figure 9 shows the relationship between the axial static contact stiffness and the axial load with in single-nut and the preload double-nuts ball screw system. The axial stiffness of ball screw can be obtained according to the axial deformations of the single-nut and the preloaded double-nut relative to the screw under the action of different axial loads shown in Figures 6 and 7. It can be found that the static stiffness of single-nut ball screw increases with the increase in applied axial force, and the speed of increase gradually decreases. The changes in static stiffness of the preload double-nuts ball screw system are divided into two stages: in the beginning stage, the static stiffness of the ball screw decreases with the increase in the external axial force, but the decrease is smaller; in the second stage, when the axial load is enlarged enough to disengage one of the nuts from the screw, the static stiffness of the ball screw is the same as that of the sing-nut ball screw. It also can be found that the static stiffness of the double-nut ball screw becomes higher with the increase in the preload in the beginning stage, and the axial load needed to disengage one of the nuts from the screw becomes larger with the increase in the preload.

Axial contract stiffness of single-nut and position preloaded ball screw mechanism.
Contact angles formed at screw and nut
In the static state, the contact angle formed at the ball-screw

Contact angles formed at the ball-screw and ball-nut contact areas varying with different operating conditions: (a) left ball and (b) right ball.
Elastic deformations produced at screw and nut contact areas
The normal forces arising at the contact areas within the preloaded double-nut ball screw are different under the situation of one axial load acting on one of the nuts. The different normal forces will cause different elastic deformations at the contact areas. Figure 11(a) and (b) shows the elastic deformations formed at the ball-screw

The elastic deformations formed at the ball-screw and ball-nut contact areas varying with different operating conditions: (a) left ball and (b) right ball.
Normal forces arising at screw and nut contact areas
In the preloaded state of the double-nut ball screw, due to the consistency of the axial displacements of the left and right nuts, the axial load will lead to the decrease of normal forces between the raceway of the left nut and screw, and the increase in the normal forces between the raceway of the right nut and screw. Figure 12(a) and (b) shows the normal forces arising at the ball-screw
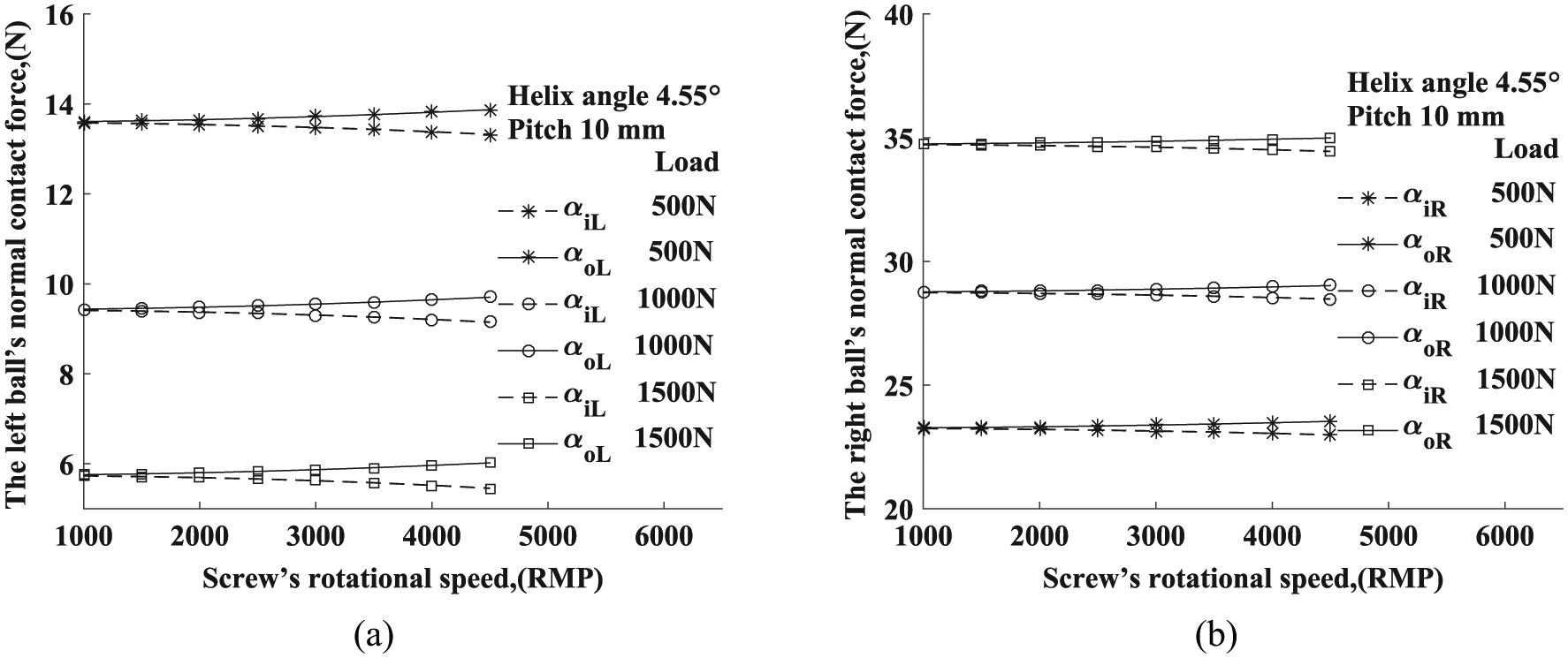
The normal forces arising at the ball-screw and ball-nut contact areas varying with different operating conditions: (a) left ball and (b) right ball.
Angular velocities of ball’s spinning and revolution
The ball within either left nut or right nut generates two angular velocities when a ball-screw system is operating at a certain angular speed and under an axial force applied on the left nut. These two angular velocities are expressed in the absolute value. The revolution angular velocities of the balls within both left nut

The angular velocities of the left and right ball varying with different operating conditions: (a) revolution angular velocity
Axial dynamic contact stiffness of position preloaded ball screw
In the preloaded state of the double-nut ball screw mechanism, the axial displacement of the double-nut relative to the screw under an external axial load can be obtained by the equation (34). It is determined through a function that related the rotational speed of the screw, the external axial load applied to the left nut, and the preload. In the case of given preload, the axial displacement of the double-nut relative to the screw will change with the change of the operating condition, and the dynamic contact stiffness of the position preloaded ball screw mechanism will change accordingly. Figure 14(a) and (b) shows the changes of the dynamic contact stiffness varying with different operating conditions. It can be found that the dynamic contact stiffness of the preloaded ball screw mechanism increases with the increase in the screw’s rotational speed. The variation range of the dynamic stiffness increases with the increase in axial load under the same preload. And the variation range of the dynamic stiffness decreases with the increase in preload under the same axial load. But the impact of the rotational speed to the ball screw’s dynamic stiffness is small, and the biggest variation of the dynamic stiffness is only 1.06% in this article.

The dynamic contact stiffness of position preloaded ball screw mechanism varying with different operating conditions: (a) preload 940 N and (b) preload 1375 N.
Conclusion
The contact stiffness of the position preloaded ball screw mechanism varies with the operating conditions. Several parameters, such as contact angles, contact deformations and normal contact forces at the contact areas, revolution, and spinning angular velocity, greatly influence the contact stiffness of the position preloaded ball screw mechanism. The conclusions are listed below:
The changes in static contact stiffness of the preload double-nuts ball screw system are divided into two stages: in the first stage, the static stiffness of the ball screw decreases with the increase in the external axial force; in the second stage, when the axial load is enlarged enough to disengage one of the nuts from the screw, the static stiffness of the ball screw is the same as that of a sing-nut ball screw.
An increment of preload arises in the position preloaded ball screw mechanism under the high rotational speed of the screw due to the action of centrifugal force and gyroscopic moment applied on the ball. And the increment of preload arises with the increase in the initial preload.
The contact angle formed at the ball-screw contact area is larger than that formed at the ball-nut contact area. The difference between these two contact angles is enlarged with the increase in the screw’s rotational speed. And the difference between the contact angles formed at the left ball-screw and left ball-nut contact areas is enlarged by increasing the axial load. On the contrary, the difference between the contact angles formed at the right ball-screw and right ball-nut contact areas is narrowed by increasing the axial load.
The deformation formed at the ball-screw contact area
The dynamic contact stiffness of the preloaded ball screw mechanism increases with the increase in the screw’s rotational speed. The variation range of the dynamic stiffness increases with the increase in axial load under the same preload. And the variation range of the dynamic stiffness decreases with the increase in preload under the same axial load.
For the studied ball screw’s geometry and rotational speed range, the impact of the rotational speed on the ball screw’s dynamic axial contact stiffness is small, and the biggest variation of the dynamic axial contact stiffness is only 1.06% in this article.
Footnotes
Appendix 1
Acknowledgements
The authors thank the Key Laboratory of Performance Test and Reliability Technology for CNC Machine Tool Components of Chinese Machinery Industry for providing the experiment materials.
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study has been supported by the National Science and Technology Major Projects of China (2016ZX04004007).