
Abstract
Preloading is an effective way to maintain good performance of angular contact ball bearings. Traditionally, the rigid and constant preload are applied by uniform approaches on the bearing system. However, non-uniform loads occur while the surfaces of spacer are obliquitous at rigid preload or the stiffnesses of springs are inconsistent at constant preload. In this article, a new approach is proposed to incorporate the non-uniformity effect. Using this approach, the bearing performance under practical operating conditions could be improved. At first, the critical relationship between the stiffness behavior and the non-uniform preload of the ball bearing system is studied. Then, based on Jones’ model, the stiffness function of angular contact ball bearings with non-uniform preload is established analytically. Based on the functions, boundary conditions are determined and used to calculate the local contact deformation and predict the bearing stiffness when the preload is non-uniform. Finally, the stiffness of both ceramic and steel ball bearings under non-uniform preload and various operating conditions is simulated. Comparing with traditional methods, the new method has better performance in stiffness prediction under non-uniform preload. It will give a designer a deep insight on the dynamic analysis and optimization of the rotor-bearing system.
Keywords
Introduction
With the increasing demand of higher productivity, the speed of machining becomes higher and higher. 1 High-speed machining technology is growing in popularity among industries due to the lower cutting forces and higher productivity. In the machine tool, high-speed spindle is the vital part for achieving high-speed machining. Generally, in order to guarantee the high stiffness, the angular contact ball bearings are applied in the spindle. The stiffness of those bearings has an important effect on the critical speed, the vibration mode of structure, and the vibration response of rotor-bearing system. 2 In addition, it has an important impact on the machining accuracy of machine tool.
Due to the bearing preload, the local contact deformations of rings and balls of bearings are generated. But it is indeed good for the stiffness and working life of rotor-bearing system. Therefore, for ensuring high stiffness of the spindle, the initial preload is commonly applied on the bearing system. 3 The traditional bearing preloading methods are categorized as follows: rigid preload, constant preload, and variable preload. Variable preload technology is the most widely used way for preloading. It is suitable for various cutting conditions, such as the heavy cutting at a low-speed range and the light cutting in a high-speed range. 4 It has drawn much attention from the scholars all over the world. Jiang and Mao 5 investigated the variable preload corresponding to the rotation speed. They found out that under variable preload, the temperature rise and the dynamic stiffness of the spindle were outstanding. The new devices were presented for variable preloading in recent years. Using centrifugal force, the device, developed by Hwang and Lee 6 , could provide an appropriate preload according to the machining conditions. Based on the mechanism of the active bearing load monitoring and controlling, the other device which consisted of integrated strain-gage load cells and piezoelectric actuators was developed by Chen and Chen 7 . With this device, the bearing preload can be adjusted online according to the cutting conditions. However, these treatments mentioned above are short of the consideration of the non-uniform preload. In addition, as the bearing stiffness is no longer uniform under the non-uniform preload, the traditional method may hardly be suitable for solving the optimization of preloading problem.
The bearing stiffness which is decided by preload is a critical issue in the spindle design. Through the theoretical analysis and experimental study, the influences of bearing preload were investigated by both scholars and engineers. In 1960, a general theory for determining the elastic compliances of a system under arbitrary load and speed conditions was presented by Jones. 8 Gupta 9 built a model of bearing with 6 degrees of freedoms. The general mathematical model of highly modular character was proposed by De Mul et al. 10 In this model, high-speed rolling elements were considered, but the internal frictions were neglected. Based on the model, De Mul computed the bearing stiffness matrix analytically and further used it internally in the iterative bearing equilibrium calculation. Based on Hertz contact theory, Harris 11 systematically introduced the computing methods which were widely applied for evaluating the rolling bearing performance and meeting the ordinary demand for spindle design. In a work by El-Saeidy and Sticher, 12 using finite element method and Lagrange’s equations dynamics of rotor-bearing systems was studied through incorporating the gyroscopic effects and bending of the shaft. In 2002, an analytical model of angular contact ball bearings with 5 degrees of freedom was established by Liew et al. 13 In this model, both bearing centrifugal loads and tilting stiffness effects were considered. All the models and methods mentioned above are used to investigate the stiffness of ball bearings with uniform load, such as the rigid preload and the constant preload.
A general model of angular contact ball bearings with non-uniform preload is presented in this article. First, the non-uniform preload of ball bearing is discussed in section “Background.” The stiffness model and calculation procedure of ball bearing with non-uniform preload are presented based on the iterative bearing equilibrium in section “The stiffness model of bearing under non-uniform preload.” The ceramic and steel ball bearings are applied to investigate the bearing stiffness at high and low rotating speeds, respectively. In section “Results and discussion,” the results of representative simulations of the ceramic and steel ball bearings are presented and discussed to evaluate the non-uniform preload effect.
Background
For the machining center, the range of spindle operation speed is wide and the cutting conditions are various, therefore the rigid preload and the constant preload can hardly guarantee the performance consistency of spindle. Variable preload which can automatically adjust preload under different rotating speeds 5 is developed, but the cutting conditions in these preloading methods are always ignored. In this article, a novel preload, named the non-uniform preload method, is presented. Under non-uniform preload, the stiffness of bearing is also non-uniform, which helps to improve the bearing performance and prolong the spindle life. The modes of force action which include the rigid preload, the variable preload, and the non-uniform preload are shown in Figure 1.

Three different load methods. 14
The cutting loads, the inconsistency of springs, and the error of spacer will bring about the external forces and bending moments on the bearings and they would further lead to deformation. Figure 2 illustrates the deformation of the bearings due to the external forces and moments.

Bearing deformation under load conditions: (a) external moments and (b). external loads. 14
As it is shown in Figure 2, while the load distribution of the bearing is non-uniform, there would be an angle between the ideal and practical center axis of the bearing, which would lead to the sharp change of the stress between the balls and bearing rings. Further, the bearing life will be shortened because it is highly dependent on the max contact stress of the bearings. In order to solve this problem, preloads such as the constant preload, spring preload, and variable preload is adopted in order to smooth the stress distribution and improve the bearing life. In this article, a custom system consisting of six actuators, labeled as 1–6 (as shown in Figure 2(b)), is presented for simulating the non-uniform load. The actuators uniformly locate at the outer ring of ball bearings. By controlling the actuators independently, different non-uniform loads can be obtained.
In a study by Wu et al., 14 the thermal characteristic of angular contact ball bearings under non-uniform preload was studied using the quasi-static model with 3 degrees of freedom. Li et al. 15 investigated the temperature distribution of ball bearing under non-uniform preload using 5-degree-of-freedom quasi-static model and found that the non-uniform preload can effectively change the contact status between balls and rings, giving rise to the non-uniform temperature distribution of ball bearings. In this article, the effects of non-uniform preload on the stiffness of ball bearings are investigated at low and high rotating speeds.
The stiffness model of bearing under non-uniform preload
According to the moment of momentum conservation and force balance, a novel equilibrium equation of bearing is modeled. And based on the equation, the bearing performance under non-uniform preload conditions can be obtained.
Hypothesis
In order to take the relative motion between the inner ring and the outer ring of the bearing into consideration, the latter is assumed as fixed and the former can be moved. For simplicity, some other assumptions are made as follows:
Based on the Hertz contact theory, the contacts between rings and balls are analyzed.
Bearing rings are regarded as rigid, but the bearing-concentrated contacts can be deformed elastically.
The effects of the bearing cage and the lubrication are neglected.
It is assumed that when the bearing is rotating, there is no change of the relative positions of the balls.
Non-uniform preload of ball bearings
In order to preload the bearing non-uniformly, actuators are installed on the outer ring of the bearing. The forces in Z direction can be decomposed as the forces with the same value and moments Mx and My are based on the assumption that the rings are rigid. Figure 3 demonstrates the non-uniform preload applied at six points of the bearing and its simplification. According to Jones’ model, stiffness of the bearing can be calculated.

Non-uniform preload and its simplification.
As shown in Figure 3, a resultant force



where n and nu are the total number and number of forces, respectively.
Bearing model with non-uniform preload
In the analysis, Z direction is considered as the axial direction. The bearing coordinate system is shown in Figure 4. The contact load of the bearing is defined as Q and it can be decomposed into three loads Qrx, Qry, and Qz in X, Y, and Z directions




The coordinate system of ball bearings.
The loads of bearing at different directions are represented as



Moreover, the moments about axis parallel to X and Y axes are as follows


The moments Mx and My are also equal to the sum of each rolling’s moment, so that


Based on the Pythagorean theorem, the relationships between the variables in Figure 5 are as follows


where







Positions of ball center and raceway groove curvature centers at angular position
The normal ball loads Qoj and Qij depend on the normal contact deformations δoj and δij


The force equilibrium equations of the jth ball including the forces in horizontal and vertical directions are as follows


where

When the inner ring of ball bearing is rotating


According to the mechanics theory, the force equilibrium equations of the whole bearing are as follows





where

The solution procedure of bearing stiffness with non-uniform preload
Figure 6 shows the solving process of bearing stiffness under the non-uniform preload. The calculation steps are summarized as follows: (1) the initial values of the relative displacements between outer and inner rings of ball bearings

The stiffness solution procedure of angular contact ball bearings with non-uniform preload.
In step 4,
Load conditions and model validation
Load conditions
Based on the non-uniform preload model, the stiffness and contact force of the bearing under different working conditions are calculated. The ceramic ball bearing SKF 7012C and the steel ball bearing NSK 7210C are selected to simulate the stiffness of ball bearings at high and low speeds, respectively. The basic parameters of these two bearings are summarized in Table 1.
Parameters of the ball bearings.

For investigating the non-uniform effect of high-speed bearing, the ceramic ball bearing SKF 7012CD/HCP4A is selected. With oil–air lubrication, the maximum rotation speed of this bearing could reach to 26,000 r/min. In simulation, 20,000 r/min is chosen as the maximum speed according to the effect of non-uniform preload. The maximum preload of 1150 N is applied based on the suggested high preload of 1200 N. For investigating the effect of moment and external forces, four types of load conditions are designed as follows: (1) Condition I: preload Fz, (2) Condition II: preload Fz and moment about axis parallel to X direction (Mx), (3) Condition III: preload Fz and radial forces in X and Y directions (Fx and Fy), and (4) Condition IV: preload Fz, radial forces in X and Y directions (Fx and Fy) and moments about axis parallel to X and Y axes (Mx and My). The load conditions of the ceramic ball bearings without external forces (Conditions I and II) and with external forces (Conditions III and IV) are listed in Table 2.
The load conditions of the ceramic ball bearings.

Condition I: Fx = 0, Fy = 0, Mx = 0, and My = 0; Condition II: Fx = 0, Fy = 0, and My = 0; Condition III: Mx = 0 and My = 0.
The steel ball bearing NSK 7210CTYNSUL/P4 is utilized to evaluate bearing stiffness at low rotating speed. The limiting speed of this bearing is 16,500 r/min with grease lubrication. For back-to-back bearing arrangement with high preload of 1180 N, the coefficient of speed is 0.55. So, the maximum speed of the bearing is 9075 r/min. In simulations, the 9000 r/min is applied as the maximum speed under the uniform load conditions. For preventing the failure of the ball bearings, the maximum speed is chose at 6000 r/min under non-uniform preload conditions. By comparing the load on the six points located at the outer ring of ball bearings, it can be seen from Figure 2(b) that the loads applied on points 1 and 4 have the same effect on the stiffness of ball bearings due to the axisymmetric structure of ball bearings. The same phenomenon can be observed on non-uniform preload at points 2, 3, 5, and 6. Therefore, points 1 and 6 are selected to investigate the non-uniform preload effect on bearings’ stiffness. Table 3 lists the load conditions of the steel ball bearings. These load conditions can be classified into four types: uniform preload (UP, No. 1–4), non-uniform preload at point 6 with 200 N preload (NL6, No. 5–8), non-uniform preload at point 1 with 200 N preload (NL12, No. 9–12), and non-uniform preload at point 1 with 100 N preload (NL11, No. 13–16). The load applied to bearing increases with the increment of No. at these four types of load conditions, respectively. For comparing the relationship in four types of load conditions, according to the load, four groups are designated as follows: GI (No. 1, 5, 9, 13), GII (No. 2, 6, 10, 14), GIII (No. 3, 7, 11, 15), and GIV (No. 4, 8, 12, 16).
The load conditions of the steel ball bearings.

The bearing stiffness is calculated based on the basic parameters and load conditions mentioned above. The program which is applied to compute the bearing stiffness is programmed by MATLAB according to the model developed in section “The stiffness model of bearing under non-uniform preload.” The comparing results of the bearing stiffness at different speeds and different loads of the steel and ceramic ball bearings are discussed in detail in the next section.
Model validation
In the literature, the stiffness of ball bearing with non-uniform preload has not been reported. Thus, the steel ball bearing NSK 7210 with uniform preload is selected to validate the correctness of bearing model which is developed in this article. According to the manual of super precision bearing, 16 the preload of NSK 7210 can be classified by tiny preload, light preload, medium preload, and heavy preload. The bearing stiffness illustrated in the manual is the value of back-to-back or face-to-face bearings and is the double of the calculated stiffness. The relationship between axial and radial stiffnesses is as follows

where
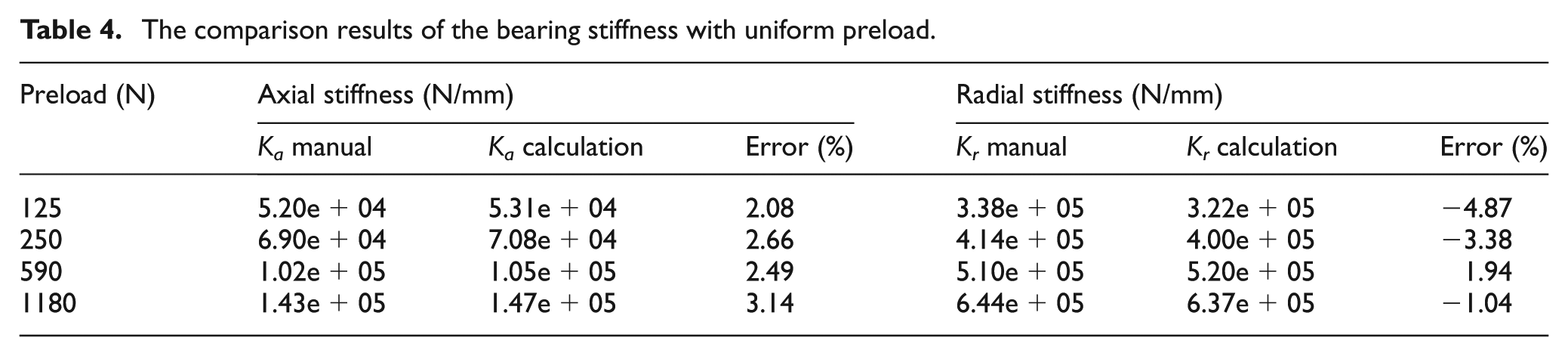
Table 4 demonstrated the stiffness results of the steel ball bearing with uniform preload. The 5 degrees of freedom is used in this article, so Kxx and Kzz are selected to compare the radial and axial stiffnesses from manual, respectively. The error between the stiffness from manual and the calculation results is less than 5%. It can be concluded that the method developed in this article is correct and feasible.
The comparison results of the bearing stiffness with uniform preload.
Results and discussion
The results of ceramic ball bearing SKF 7210C
The effect of preload and rotating speed on bearing stiffness without external loads
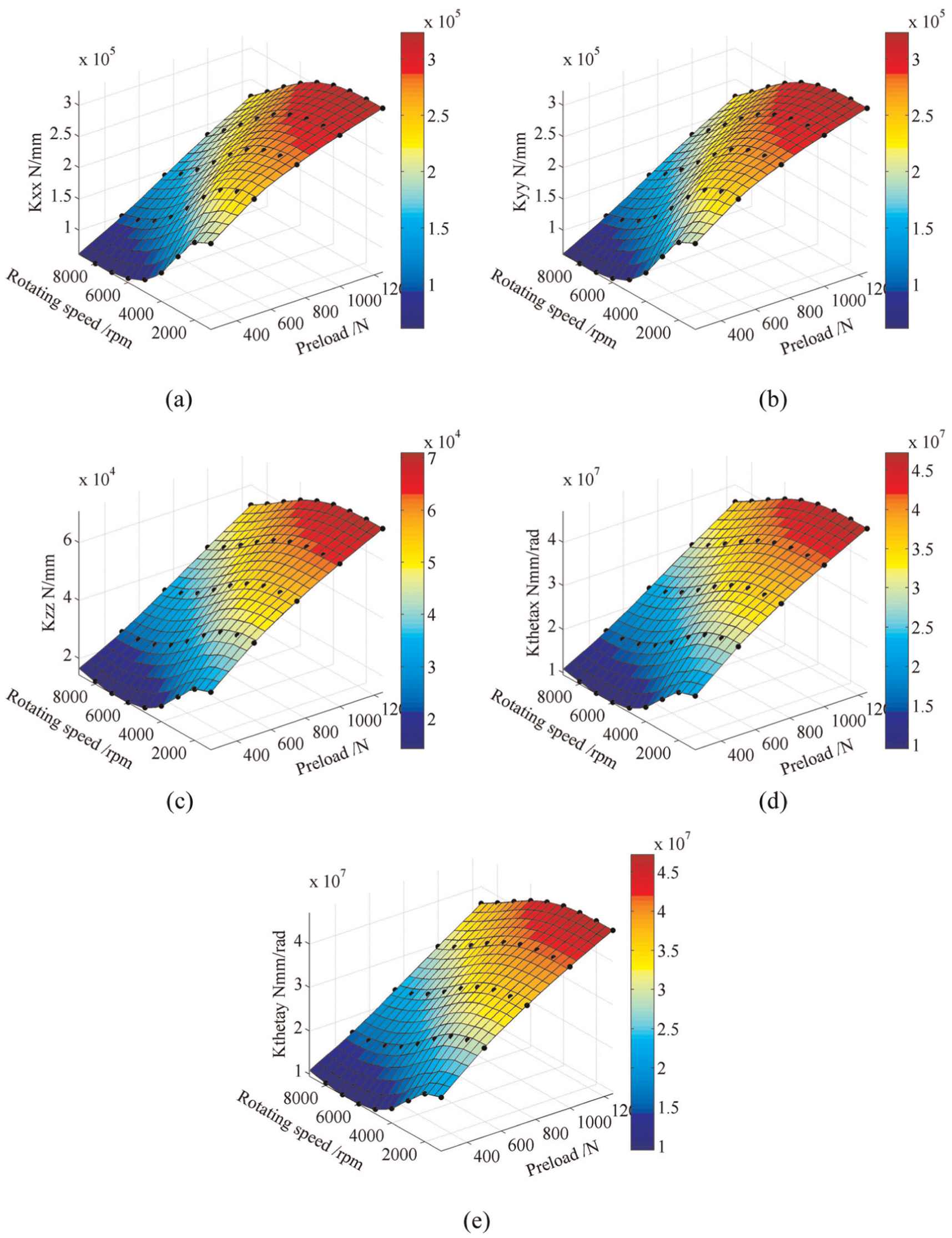
Figure 7 illustrates the five stiffnesses of ball bearing which include radial stiffnesses in X and Y directions, axial stiffness, angular stiffnesses about axis parallel to X and Y directions related to the rotating speed and preload.

The stiffness results of SKF 7012C under different preloads and rotating speeds: (a) radial stiffness in X direction, (b) radial stiffness in Y direction, (c) axial stiffness, (d) angular stiffness about axis parallel to X direction, and (e) angular stiffness about axis parallel to Y direction.
Because the uniform preload is applied to the ball bearings, the radial stiffnesses in X and Y directions are equal to each other due to the axial symmetric structures of ball bearings. It is equally applied to angular stiffnesses about axis parallel to X and Y directions. From Figure 7(a) and (b), it can be seen that the radial stiffnesses Kxx and Kyy are increasing when the preload and rotating speed are rising. While the rotating speed is 10,000 r/min and the preload is 50 N, the radial stiffness is about 1e5 N/mm.
The axial stiffness Kzz, as shown in Figure 7(c), is lower than radial stiffness under the same running condition. When the highest rotating speed 20,000 r/min and the maximum preload 1150 N are applied to this ceramic ball bearings, the maximum radial stiffness (4.5e5 N/mm) is about 8 times larger than axial stiffness (5.5e4 N/mm). The axial stiffness is approximately linear with the preload. The rotating speed has slight influence to the axial stiffness. When the preload is increasing, the axial stiffness Kzz is increasing at first and then decreasing with the rotating speed. From Figure 7(d) and (e), it can be concluded that the relationship among angular stiffness, rotating speed and preload are the same with the relationship among the axial stiffness, the spinning speed, and the preload. Comparing to other stiffnesses, the angular stiffnesses have the highest value. The maximum value of it is about 4.2e7 N mm/rad. With the increment of preload, the radial, the axial, and angular stiffness are all increasing. The reason is that the contact angles and loads between balls and inner and outer rings are increasing while the preload rises.
Under the constant preload, the increment of axial deformation gradually gets slower when the external axial load is increasing. This is because that the contact angle is increasing with the increment of external axial load, which would further give rise to the ball bearing stiffness in the axial direction. With the increasing radial load, the radial deformation is changing nonlinearly, especially under the low preload condition. While external radial force is higher than
The effect of moment and rotating speed on bearing stiffness without external loads
Figure 8 demonstrates the bearing stiffness under Conditions I–IV. Different from Condition I (the normal condition), the bearing is operating with the moment about axis parallel to X direction in Condition II. The stiffnesses under Conditions I and II are almost the same. In addition, all stiffnesses of bearing are increasing nonlinearly with the increment of the rotating speed and preload Fz. The radial stiffness shows the stronger nonlinear feature than the axial and the angular stiffnesses. From Figure 8, it can be observed that there are no obvious differences of stiffness under Conditions I–IV, while the minimum preload Fz = 50 N is applied to the ball bearings.

Relationships between bearing stiffness and different speeds and load conditions: (a) Kxx, (b) Kyy, (c) Kzz, (d) Kthetax, and (e) Kthetay. (Number of LC is the short name of “number of load conditions.”)
The effect of external loads and rotating speed on bearing stiffness and contact force
From Figure 8, it can be seen that under Conditions III and IV, the stiffness increases when the rotational speed rises. Comparing the stiffness under Condition III with the one under Condition IV, it can be found that the curves have same trends. And, there are few differences between the values of the stiffness when the speeds are changing. According to Figure 8(c), Kzz varies a little under different speeds. It illustrates that under those load conditions, the bearing stiffness is not greatly changed by the non-uniform preload.
The bearing stiffness is almost the same under Conditions III and IV. Kxx and Kyy are increasing with the increment of rotational speed. Kthetax and Kthetay have the biggest value, while Kzz is the smallest. For example, as the speed changes from 10,000 to 20,000 r/min, Kxx and Kyy increase from 1e5 to 4e5 N/mm, the Kthetax and Kthetay rise from 2e6 to 8e6 Nmm/rad, and Kzz changes from 3000 to 10,000 N/mm.
The bearing stiffness also rises quickly as the load increases under Conditions III and IV. Specifically, when the load value increases from 50 to 1350 N, Kxx and Kyy change from 2e5 to 6e5 N/mm, and Kthetax and Kthetay increase from 2e6 to 8e7 Nmm/rad. According to the stiffness computation results under non-uniform preloads and preload with different load conditions, we can conclude that although the load conditions change, the curves and values of the stiffness almost remained the same.
Figure 9 shows the contact forces of inner and outer rings under Conditions I–IV under preload Fz = 1150 N at 20,000 r/min rotating speed. The contact forces obtained from Conditions I and II are almost the same. Under Conditions III and IV, the contact forces are also the same. In these four conditions, the maximum contact forces between balls and the outer ring are larger than that between balls and the inner ring and the ball. In general, larger contact force in the bearing ring will lead to higher stiffness and shorter life. In other words, if the contact force is reduced, the bearing stiffness will be decreased and the life will be extended. From Figure 9, it can be seen that bearings under non-uniform preload (Conditions III and IV) have shorter life than the bearings under preload (Condition I), as the maximum of the contact forces under Conditions III and IV are larger than 600 N and the maximum contact force under Condition I is about 200 N.

The contact forces of inner and outer rings under Conditions I–IV with preload Fz = 1150 N and 20,000 r/min rotating speed: (a) inner ring and (b) outer ring.
In conclusion, the stiffness performance of bearings under the non-uniform preload is higher than that under the normal preload. However, due to the higher maximum contact force, the bearing life is shortened under non-uniform preload (Conditions III and IV). The external moment that applied to bearing has no obvious influence on bearing stiffness and contact force at high-speed conditions. It means that the external forces play the key role in the bearing stiffness at high-speed conditions.
The results of steel ball bearing NSK 7210C
The effect of preload and rotating speed on bearing stiffness with uniform preload
Figure 10 presents the relationship among the stiffness of ball bearing NSK 7210C, the preload, and the rotating speed.
Stiffness results of NSK 7210C under different preloads and rotating speeds: (a) radial stiffness in X direction, (b) radial stiffness in Y direction, (c) axial stiffness, (d) angular stiffness about axis parallel to X direction, and (e) angular stiffness about axis parallel to Y direction.
The radial stiffness of ball bearings dramatically decreases with the increment of rotating speed under the constant preload. On the contrary, the radial and angular stiffnesses are dramatically reduced at first and then increase while the rotating speed is increasing. The maximum descent of stiffness occurs while the minimum preload is imposed on the bearing. Comparing with the bearing SKF 7012C, the speed effects on the radial and angular stiffness of bearing NSK 7210C are more remarkable and greater than the preload effect. The radial and angular stiffnesses between X and Y directions have the same variation trend due to axial symmetry of bearing. The maximum stiffness occurs while the maximum preload 1000 N is utilized on the bearing at the minimum rotating speed 1000 r/min. When the rotating speed increases, the centrifugal force of ball is increasing rapidly. This further reduces the contact angle between balls and the raceway of outer ring and induces the contact force. Conversely, the normal contact stiffness between balls and the outer ring raceway and radial stiffness increased.
The effect of non-uniform preload and rotating speed on Kxx
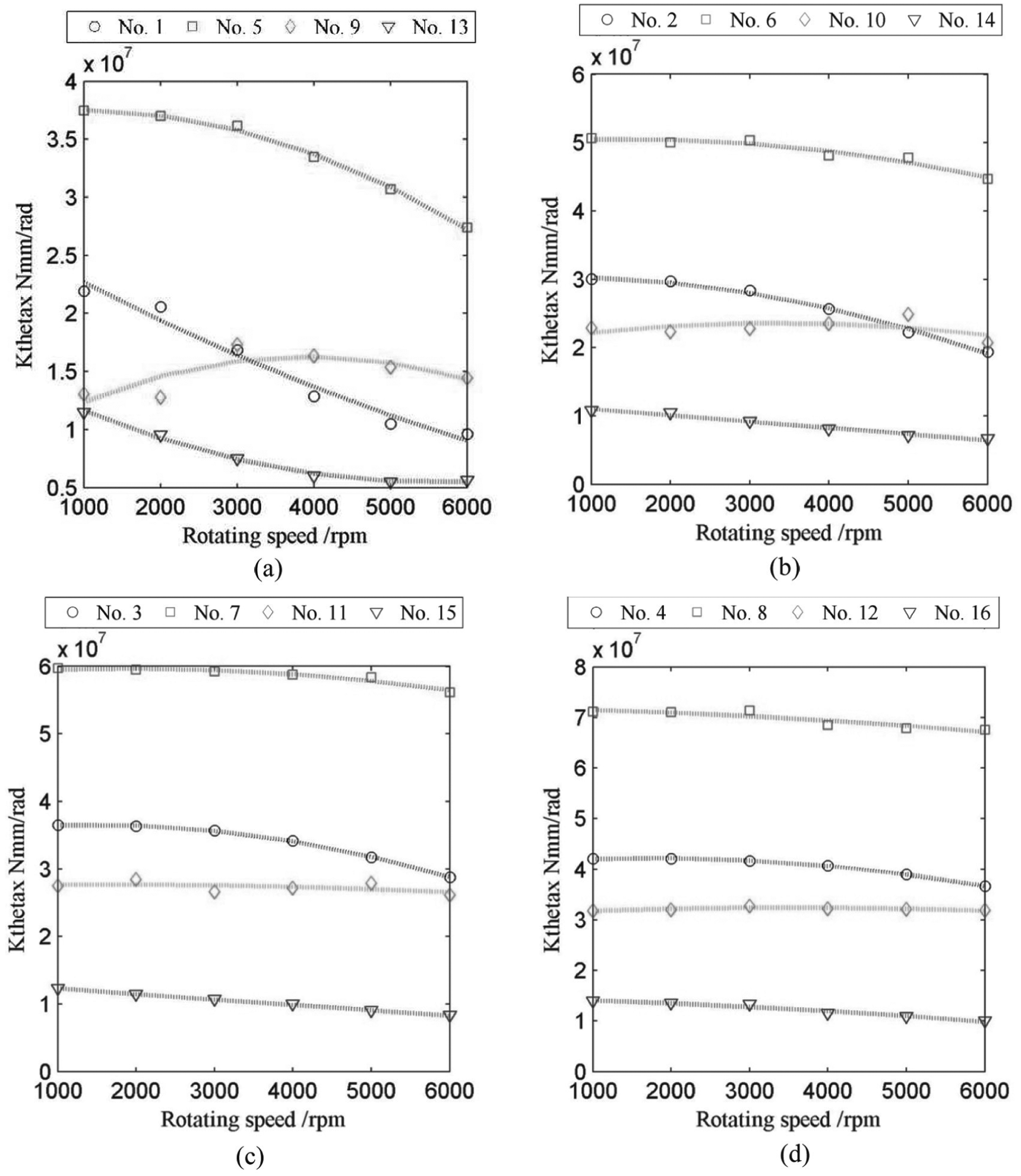
Figure 11 shows the stiffness results of steel ball bearing NSK 7210C with non-uniform preload under different load conditions.

The radial stiffness Kxx results of NSK 7210C with non-uniform preload: (a) GI, (b) GII, (c) GIII, and (d) GIV.
According to section “The stiffness model of bearing under non-uniform preload,” the 16 load conditions are divided into four categories for comparing the non-uniform preload effect on bearing stiffness. The non-uniform preload increased from Figure 11(a)–(d). While the bearing is running 1000–4000 r/min, the orders of Kxx under different load conditions are NL12 > UP > NL11 > NL6. If the speed is higher than 4000 r/min, the order would be changed due to the speed effect on Kxx. With the increment of rotating speed, Kxx shows the downward trend under preload and non-uniform preload at point 1. However, Kxx under non-uniform preload at point 6 presents the upward trend while the external load is higher than 250 N. Comparing the load effect under different load conditions on Kxx, it can be concluded that the overall is upward trend.
The effect of non-uniform preload and rotating speed on Kyy
Figure 12 illustrates the radial stiffness Kyy results of NSK 7210C under non-uniform preload.

The radial stiffness Kyy results of NSK 7210C with non-uniform preload: (a) GI, (b) GII, (c) GIII, and (d) GIV.
Kyy under non-uniform preload at point 6 has the maximum value comparing with the Kyy under other load conditions. This is because the position of point 6 on the bearing is located between X and Y axes, which give rise to the component on the Y axis. Due to the speed effect, Kyy under 200 N preload without external load is decreasing when the rotating speed is getting lower and lower. Kyy under non-uniform preload at point 1 with 100 N preload has the lowest results for the minimum preload. While preload is equal to 50 N, Kyy is decreasing significantly with the change of the rotating speed. With the increment of rotating speed, this effect gradually reduced along with the increment of preload.
The effect of non-uniform preload and rotating speed on Kzz
Figure 13 demonstrates the axial stiffness Kzz results of NSK 7210C under non-uniform preload.

The axial stiffness Kzz results of NSK 7210C with non-uniform preload: (a) GI, (b) GII, (c) GIII, and (d) GIV.
From Figure 13, it can be seen that there is no obvious change on Kzz under different rotating speeds. With the increment of load, Kzz increases remarkably at all rotating speeds. The order of Kzz under different working conditions is same: NL12 = NL6 > UP > NL11. The maximum Kzz at different load conditions rise from 4e4 to 7e4 N/mm, while the preload increases from 250 to 1000 N. The maximum Kzz is 7e4, while bearing is applied under 1000 N non-uniform preload at point 1 or 3 with 200 N preload. The smallest Kzz occurs at 50 N non-uniform preload at point 1 with 100 N preload and 6000 r/min rotating speed in this study. In conclusion, preload plays more important role on axial stiffness than rotating speed while the ball bearing runs at the low speed.
The effect of non-uniform preload and rotating speed on Kthetax and Kthetay
Figures 14 and 15 present the results of angular stiffness of NSK 7210C with non-uniform preload.
The angular stiffness Kthetax results of NSK 7210C with non-uniform preload: (a) GI, (b) GII, (c) GIII, and (d) GIV.

The angular stiffness Kthetay results of NSK 7210C with non-uniform preload: (a) GI, (b) GII, (c) GIII, and (d) GIV.
There is a slight decrease in the angular stiffness when the rotating speed is increasing. The order of Kthetax under different working conditions is NL6 > UP > NL11 > NL12. The order of Kthetay under different working conditions is NL12 > UP > NL11 > NL6. The reason is that the non-uniform preload at points 6 and 1 can cause the different moments about axis parallel to X and Y directions. The non-uniform preload at point 6 can generate higher moment about axis parallel to X direction than that at point 1. This brings about the highest Kthetax under the non-uniform preload at point 6. This is equally applied to Kthetay because the non-uniform preload at point 1 can generate higher moment about axis parallel to Y direction.
Conclusion
In this article, a new general bearing model under the non-uniform and various working conditions is presented. The bearing model is established based on Jones’ model, and it is considered that the non-uniform preload force is loaded on outer bearing ring. Then, the bearing stiffness under different load conditions is simulated. The simulation results with the non-uniform preload and normal load are compared. It indicates that the bearing stiffness is highly dependent on non-uniform preload and the bearing rotating speed:
Preload has critical impacts on the bearing stiffness. At high-speed condition, the rotating speed has high influence on the radial stiffnesses Kxx and Kyy. And, the radial and angular stiffnesses at low-speed condition change greatly with the increment of the rotating speed.
The external forces have more effect than the external moments on the contact force and bearing stiffness at high rotating speed. The bearing stiffness under different load conditions with and without external moment is approximately same.
The contact forces between rings and balls show the evident non-uniform distribution while the external forces applied to the bearing. In addition, the maximum contact forces between outer ring and balls are higher than that between inner ring and balls under different load conditions at high rotating speed. The position of the maximum contact force is related to the direction of the resultant force which is originated from the external forces. The non-uniform contact forces which caused by the external forces can shorten the life of bearing.
Preload shows more influence on axial stiffness than the rotating speed while the bearing is running at the low speed. Radial stiffness is decreasing greatly with the change of the rotating speed. When the rotating speed is increasing, this effect gradually reduced along with the increment of preload.
The moments which are generated by the non-uniform preload have an important influence on the angular stiffness. The impact on the angular stiffnesses about axis parallel to X and Y directions is decided by the position of the acting point of force. The higher generated moment means the higher angular stiffness.
The proposed model in this article provides the engineer a new method to optimize the bearing system, but the results need to be verified experimentally.
Footnotes
Appendix 1
Academic Editor: Aditya Sharma
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was supported by National Science and Technology Major Project under grant no. 2012ZX04010011 and China Scholarship Council.