
Abstract
This article is devoted to the study of the vibration control for blades and tower in a wind turbine. Based on the Euler–Lagrangian method, a multi-body dynamic model including three blades with distributed parameter, tower, and their coupling is obtained. Multi active tuned mass dampers have been utilizing as damping devices. Therefore, the dynamics of the tuned mass dampers are also considered in modeling. The influence of extreme wind, and grid dynamics on the vibration of the blade was analyzed. Moreover, the nonlinearity induced by space constraints, which impact on vibration control, is introduced. For active control, the constrained decentralized control strategy is designed via linear matrix inequality which tuned mass dampers stroke constraints are modeled as hard constraints. A doubly fed induction generator connected to an infinite bus including the detailed electrical and structural model was performed on MATLAB/Simulink. Simulation results show that the control strategy can effectively reduce the vibration of the blade while the damper stroke satisfies the working space permitted by the blade. Investigations demonstrate promising results for decentralized constrained control in simultaneous control blade vibrations and tower vibrations. Each actuator is driven separately from the output of the corresponding sensor so that only local feedback control is achieved; this improves the system reliability.
Keywords
Introduction
Vibrations in wind turbines can affect the safe operation and influence on power production. 1 To reduce the impacts of vibrations, structural control is the ideal control approach for wind turbines. 2 Due to the hollow nature of the blade and the nacelle, the damper installed inside of these components can independently on speed or power regulation. Previous work by many researchers focused on the feasible of the damping devices. The tuned mass damper which consists of a mass, spring, and damping, is the most common device in vibration control. 3 For mitigating of a tower of the wind turbine, a passive tuned mass damper (TMD) placed on the top of the tower for reduction vibration is proposed. 4 Lackner and Rotea 5 modified the FAST wind turbine computer-aided engineering software tool, by incorporating two independent TMDs into the nacelle. Thus, add structural control capacity to Fatigue, Aerodynamics, Structures, and Turbulence (FAST). Implementing this modified version of FAST, Tong et al. 6 proposed a new optimal method for designing TMD which is used to control the tower vibration. In the study of Brodersen et al., 7 the TMD parameter estimation is conducted under different wind and wave conditions. Zuo et al. 8 investigate applying multiple TMD to reduce offshore wind turbine vibrations under multiple hazards. For suppressing blade vibrations, there are few studies regarding structural control. The motion of the blade is more complicated than the tower. No simulation software can be used to design and simulate blade structural control. In the literature,9–11 the TMDs are used to control the blade vibrations which are mainly based on the established simplified dynamic equation. The semi-active TMDs to control edgewise vibrations is presented in Arrigan et al. 9 In Fitzgerald et al., 10 the authors investigated using active TMD for mitigating edgewise vibrations. It was found that the active TMD can provide better reduction than the passive TMD. Fitzgerald and Basu 11 extends the result 10 by proposed a cable connected active TMD to suppress edgewise vibrations. However, these research focuses on the feasibility of dampers. The control algorithm uses simple linear optimal regulator state feedback and cannot guarantee the stroke constraints in theoretically. Nevertheless, in their design process, the nonlinearity due to space constraints is not considered. In the FAST-SC (the modified version of FAST 5 ) simulation, it has been demonstrated that the stop forces have a strong influence on vibration control. 12 Moreover, in the model, the rotor speed is assumed as constant and does not take into account the dynamic due to the electrical dynamic. The grid-connected wind turbines often have a voltage variation in actual operation. Due to the coupling of the mechanical part and the electrical part, the electrical disturbance will affect the mechanical characteristics of the wind turbine and cause mechanical vibration.13–16 Therefore, detailed mechanical model and electrical model of wind turbines must be considered.
In a practical implementation, full knowledge of the state vector is rarely available. An available approach is an output feedback control. Meanwhile, the centralized control strategy needs a large number of sensors and communication network; this may have poor reliability. 17 For large-scale structures, decentralized static output feedback control is a more practical approach. Solving the static output feedback with information constraints is a popular research topic. 18 An linear matrix inequality (LMI) variable transformations were obtained and a two-step procedure is proposed to improve feasibility issues of solving LMI optimization problem.19–22 In this article, based on these fore-mentioned considerations in the existing article.10,13,14,17,18 The major contributions of this article are as follows: (1) a closed-loop 12-degree-of-freedom (DOF) structural model established in Fitzgerald et al. 10 is extended to consider the grid-connected dynamic, in which the rotor speed is variable due to the change of grid voltage. Moreover, the mechano-electrical coupling model of grid-connected doubly fed induce wind turbines was developed in this article. (2) The dynamic equation established in Fitzgerald et al. 10 is extended to modeling the TMD stroke constraint. Due to the space limitations of the blade and the nacelle, the stroke of the TMD must be limited, the stopping forces are incorporated into the model when the TMD displacement exceeds the allowable stroke. (3) A decentralized static output feedback controller was implemented, which each TMD is controlled individually by the corresponding velocity signal. To the authors’ knowledge, decentralized control of wind turbines has not been studied in existing literature. To fill this gap, the present paper explores decentralized structural control of the wind turbines with TMD subjected to wind load where the damper stroke is modeled as the constraint output. The designed controllers can be easily solved via LMI optimization problem.
Electrical model of wind turbine system
Electrical disturbances in the electrical system will vary the rotor speed and electromagnetic torque of the wind turbine, therefore affecting the structural dynamics of the wind turbines.13–15 More precisely, the variation of the rotor velocity mainly affects the in-plane vibration of the blade and the lateral vibration of the tower. A grid-connected doubly fed induction generator (DFIG) system and its model are shown in Figures 1 and 2. The entire system model includes the generator, drive train, and mechanical model. Generator models are studied in Prajapat et al., 16 and for the sake of document integrity, a brief description is given here. The wind turbine is linked to the single machine-infinity bus system via a transmission line. Via back-to-back converters, the rotor is connected to the grid. These back-to-back converters consist of two series control loops. The outer loop is current control which controls the stator active power and reactive power; inner loop is voltage control which regulates the rotor voltage. Meantime, the grid-side converter maintains direct-current (DC) bus voltage stability and network-side power factor adjustment. The present paper focuses on the structural control, although there have many attempts to design advanced control approach in the literature. In this context, all controllers in the electrical model are using a simple proportional integral (PI) control. Due to space limitations, the detailed control strategy can be found in Prajapat et al. 16
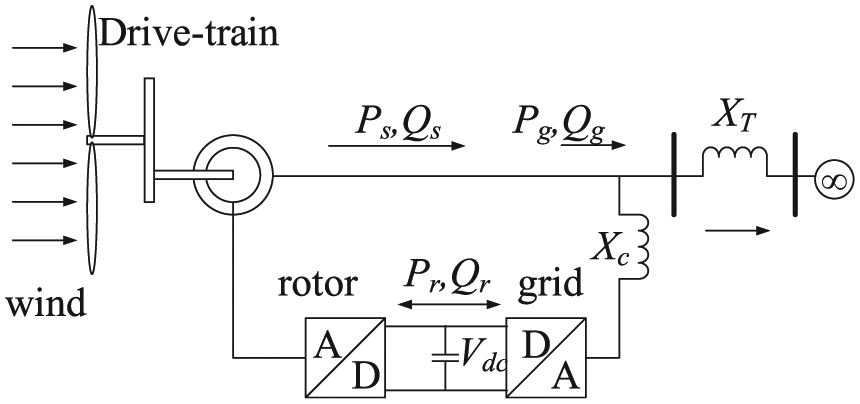
Schematic diagram of the grid-connected DFIG.

The overall simulation and control structure of wind turbine system.
The dynamic of the DFIG is represented in synchronously rotating d-q reference frame as follows


where
The generator electromagnetic torque is

The electrical system and the mechanical system are coupled by a drive train, which is modeled as a third-order flexible shaft model, as follows
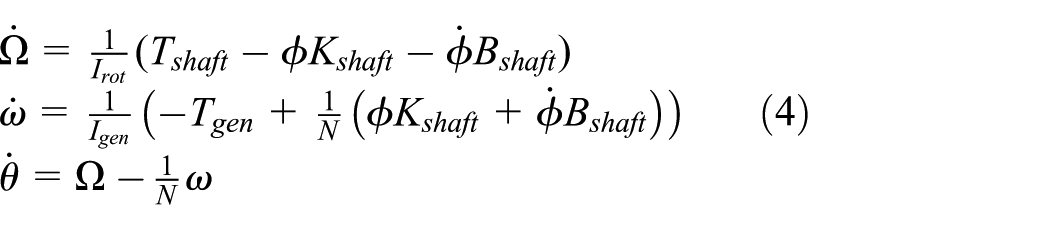
where
Nonlinear mechanical model for the wind turbine system with active TMDs
A reduced 12-DOF nonlinear wind turbine structural model was proposed which each blade and nacelle are equipped with one active tuned mass damper (ATMD) to control the in-plane vibration.
10
Figure 3 illustrates the schematic representation of vibration mode which blades are coupling with nacelle/tower including the attached ATMDs. The tower is modeled as Bernoulli cantilever beam described in the fixed coordinate system


A schematic diagram of ATMDs in blade and nacelle.
Due to the coupled mechanical structure in wind turbine, modeling process will be complicated. As the method developed in previous (Fitzgerald et al.),
10
the governing differential equations of wind turbines with ATMD can be obtained by applying the Euler–Lagrangian approach. Variable

where
Kinetic and potential energy
A position vector

The position vector
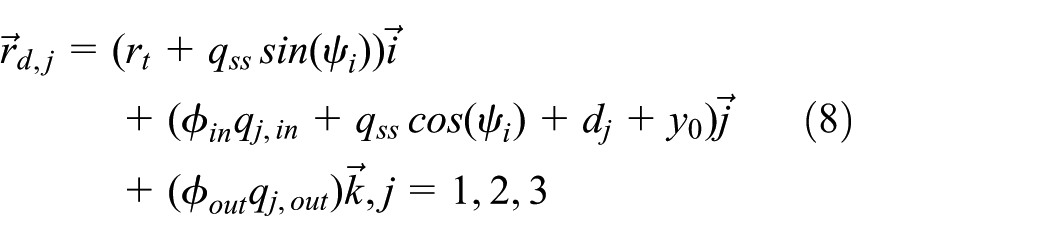
where
The velocity vector of the blade and the ATMD are obtained by differentiating

where
The elasticity force, centrifugal force, and the gravity force together cause the total potential energy, given by

where
The external force action on blades and nacelle
The total generalized external force vector consists of the modal aerodynamic load

The first modal aerodynamic load on the blade j is calculated as

where
The aerodynamic force on tower is

The gravity load on the tower is zero and on the blade is

In previous studies, the rotor speed is assumed constant.10,11 When the wind turbine is working at variable rotor speed, the force acts on the blade and the TMD induced by variable rotor speed is derived by

Due to the limitation of the space, the damper displacement should be completely contained inside the blade and the nacelle, and the stroke of the ATMD must be limited. The maximum allowable displacement is expressed as

The ATMD is assumed driven by ideal active actuation devices which active control force is modeled as an external force
Second-order matrix differential equation
Substitute the kinetic energy and the potential energy into Euler–Lagrangian equation (6), and the external force vector is obtained from the principle of virtual work. The final second-order matrix differential equation of the coupled system can be written as

where the matrices of the model are given in Appendix 1.
Denoting the state

where the system state equation matrices are given as

The uncertainties in the stiffness and damping matrices are presented as
Decentralized H∞ static output feedback control
By modifying equation (18) according to the structural constraints, consider the system with decentralization input and output pairs depicted as follows

where
For a given decentralized static output feedback control
Theorem 1
The closed-loop system with control law


where
The optimal constraint

Proof
From the Bounded Real Lemma,
20
solving a standard state feedback

Using Cauchy–Schwarz inequality and Schur complement, the constraint can be written as equation (21). In next step, to obtain a static output feedback control satisfy
Theorem 2
Consider the system (equation (19)) with decentralization input and output pairs, there exist constants


If LMI (equations (24) and (25)) is solvable, the system (equation (19)) is stabilizable with disturbance attenuation
Proof
To find a preassigned matrix satisfies
Theorem 3
To obtain a optimal

If the problem (equation (26)) is feasible with respect to
Remark 1
The orthogonal basis of
Remark 2
In order to obtain a preassigned decentralized structure on the control gain matrix, in our control problem, the LMI variables

where the dot denotes the non-zero term to be designed.
Remark 3
According to the discuss in Palacios-Quiñonero et al.,
20
the problem (equation (26)) may be infeasible. In this situation, a perturbed state matrix is used to overcome this problem. If the perturbation state matrix optimization problem (equation (26)) is infeasible, a method to obtain a feasible solution is proposed in present paper. The optimal γ-value is obtained by solving equation (22). As discussed in the literature,

Numerical simulations
In this section, the decentralized control to simultaneously suppress vibrations of the blade and the tower is checked out. A numerical model using the data from a 5WM wind turbine designed by the National Renewable Energy Laboratory (NREL-5WM) is established and simulated in MATLAB.Table 1 lists the fundamental data of the wind turbine. While the distributed parameters of the blade and tower, and the airfoils are given in Jonkman et al. 25 Some parameters with regard to induction generator and grid connection are provided in Table 2.
Properties of NREL5-MW wind turbine. 25

Induction generator and grid parameters. 26

In this article, the TMD in the blade and nacelle are tuned to the blade’s first in-plane mode and the tower’s first side-side mode, respectively. All parameters of TMD are assumed to be optimal, where the TMD mass ratio, tuning ratio, and the damping ratio are taken as Fitzgerald et al.
10
The blade dampers are located at 45 m distance from the hub where an allowable damper stroke is approximately
Load simulation
The control effect is analyzed in two different wind conditions. The vibration control effect at a high load is crucial when the wind speed is rapidly changing. In the first simulation performed, an extreme wind speed of a mean value

Wind speed and aerodynamic load in in-plane direction action on wind turbine.
Simulation results
In this section, the effect in the proposed model was illustrated. The measured output is the velocity of the TMD and the blade or the nacelle. In all simulation, the initial states are selected to be

As mentioned above, the stroke of the TMD must be incorporated inside the blade and the nacelle. It is subject to a stop force when the damper reaches the max allowable displacement. These stop forces are treating as disturbance input in the control design. The closed-loop response of blade and TMD using model and control method in Fitzgerald et al.
10
under wind speed of

Compared response of TMD with and without stroke constraint (Blade1).
In Fitzgerald et al.,
10
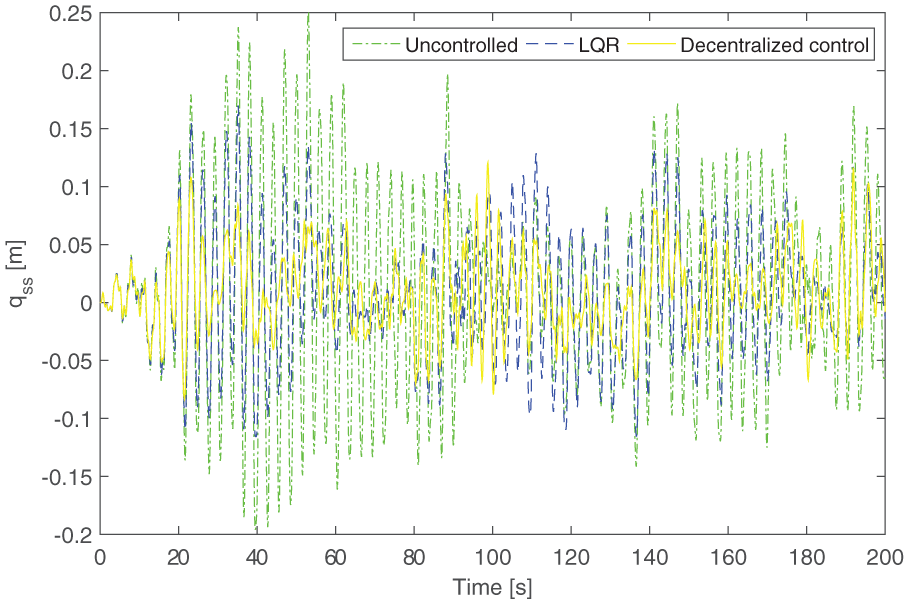
the linear quadratic regulator (LQR) is used as control law, which is essentially a centralized control approach. For comparison, the results of LQR control law are also present in this article. To show the effectiveness of the proposed control strategies. A 200 s simulation result which is compared the uncontrolled system, LQR controlled system, and decentralized controlled system was shown in Figures 6 and 7. As shown in these figures, the vibration displacements of both the blade and the nacelle are reduced under the decentralized control action. When compared with the uncontrolled system. A
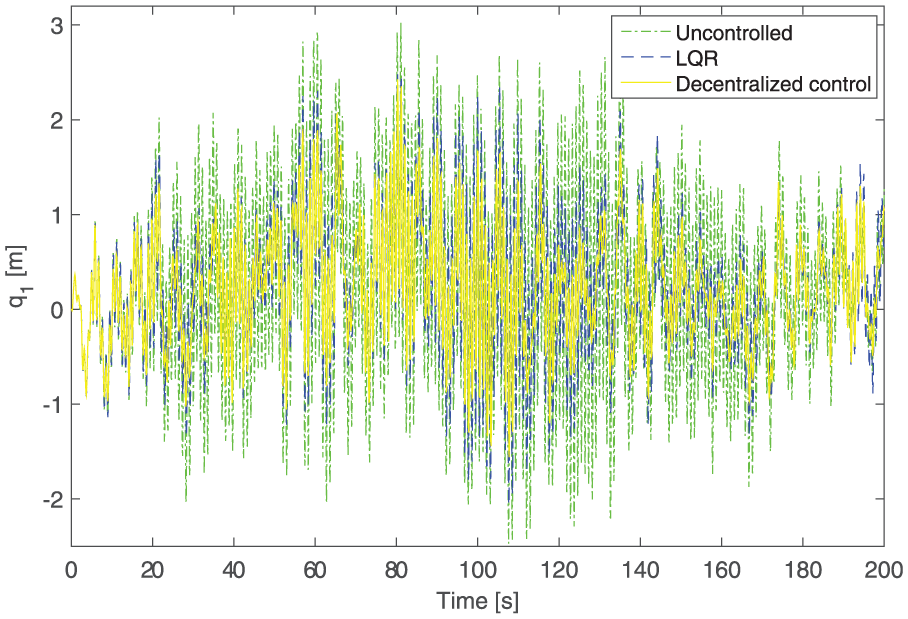
Response of closed-loop system using decentralized control (Blade1).
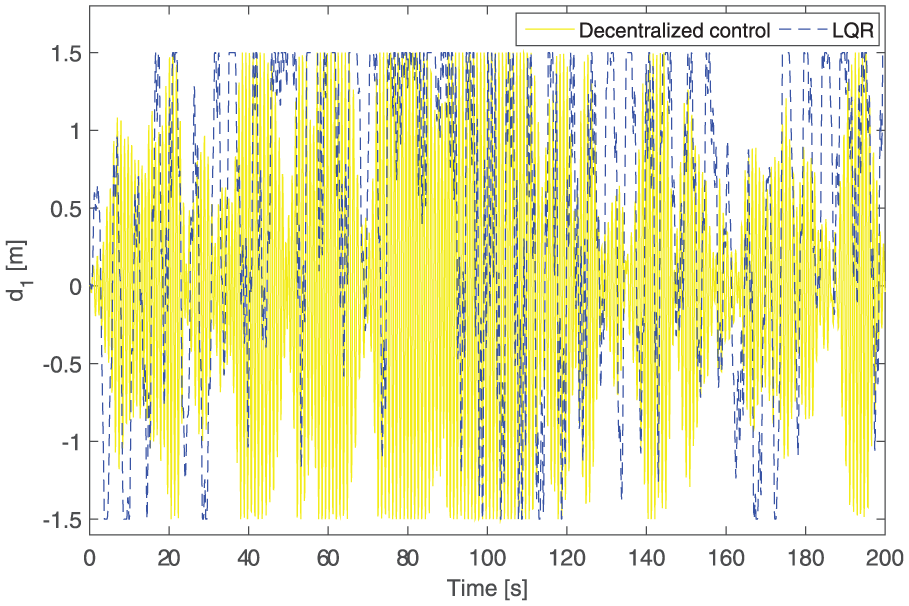
Evolution of the ATMD (Blade1).
Response of closed-loop system using decentralized control (Nacelle).

Evolution of the ATMD (Nacelle).
In order to quantify the amount of vibration displacement, it is usually using the root mean square (RMS) value. The RMS value of a vector x is calculated as

The RMS values of response displacement obtained by different control algorithm including the uncontrolled system, centralized LQR
10
approach, and decentralized
To analyze the frequency response, the power spectrum density (PSD) for blade tip displacement is shown in Figure 10. It is noted that under the control action, the peak of the first edgewise mode frequency of

Comparison of power spectrum density (Blade 1).

Comparison of power spectrum density (Nacelle).
When considering the influence of electrical dynamics on the mechanical vibration, the system is initialized at its equilibrium point. To emphasize the impact of the grid, a stationary wind speed of

System dynamic under voltage disturbance.

Blade closed-loop response.
Conclusion
In this article, a decentralized control strategy was proposed for control blades and nacelle vibrations in a wind turbine. A grid-connected wind turbine model with detailed mechanical structure, including the blade and the tower lateral vibration, is established. The dynamic equation of TMD established in Fitzgerald et al.
10
is extended to modeling the influence of variable speed and considering the TMD stroke constraint. The constrained decentralized
Footnotes
Appendix 1
System matrices for second matrix differential equation
where
where
Handling Editor: Ali Kazemy
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.