
Abstract
For ball screw feed system, it has been a common practice that screw shaft is typically supported by bearings at both ends and is driven by a servo motor through coupling. However, this drive method has a relative low dynamic rigidity due to the influence of the support bearings. In this study, the nut-direct drive system is proposed, where the screw shaft is fixed at both ends and the screw nut is driven by the hollow servo motor through the bolted flange. In order to analyze the advantages of the nut-direct drive system compared with the classical drive, the dynamic models of the classical drive and the nut-direct drive are established based on lumped parameter method, respectively. According to the lumped parameter method, the influence of the table position, the length of screw shaft, and the nominal diameter of screw shaft on the natural frequency are analyzed. Furthermore, to analyze the influence of the mechanical system on position tracking accuracy, the mechanical systems of the classical drive and the nut-direct drive are integrated into the control system using the same control parameters, respectively. Results indicate that the nut-direct drive has faster responsiveness and better position tracking accuracy compared with the classical drive.
Keywords
Introduction
As the machine tools move toward high speed and high acceleration, vibration of the feed drive system becomes one of the most important issues in order to achieve high machining performances. Ball screw feed system is widely used in the industrial production due to its large rigidity, high efficiency, and lower cost.1,2 Dynamic characteristic of ball screw feed system is the significant influence on the positioning precision, machining performance, and vibration characteristic of machine tools.3–5
In recent years, many researchers have studied the dynamic characteristics of ball screw feed systems due to their industrial significance. Khalil and Gautier 6 and Mu 7 used a lumped parameter method (LPM) to establish a dynamic model of the classical drive and the nut-direct drive, respectively. Okwudire and Altintas8,9 adopted a hybrid model to analyze the dynamic properties of the ball screw drive system considering the coupled torsional, axial, and lateral dynamics between the screw and the nut. Zaeh et al. 10 and Deng et al. 11 used a finite element model (FEM) to research the influence of the stiffness of joints on the dynamic properties of the machine tool.
This study aims at investigating the influence of different driving methods on dynamic characteristics of ball screw feed system. To this end, according to the relativity of the movement of ball screw, the nut-direct drive system is proposed compared with the classical drive. Furthermore, the equivalent dynamic models of the classical drive and the nut-direct drive are established using LPM, respectively. With dynamic models, dynamic characteristics of the classical drive and the nut-direct drive are analyzed, which indicate that the designed nut-direct drive has better dynamic performance than the classical drive. Furthermore, the mechanical systems of the classical drive and the nut-direct drive are integrated into the control system using the same control parameters, which indicate that the designed nut-direct drive has faster responsiveness and better position tracking accuracy than the classical drive. This is because the screw shaft of the nut-direct drive is rigidly fixed at both ends without support bearings, which increased the stiffness of the drive system.
Mechanical system of the nut-direct drive compared with the classical drive
In the classical drive, the screw shaft is constrained axially and radially by the angle contact rolling bearings with a back-to-back arrangement at the front end. The screw shaft is supported radially at the rear end and is driven by the servo motor through coupling as shown in Figure 1. We designed the nut-direct drive as shown in Figure 2, where the screw shaft is fixed at both ends and the nut is driven by the hollow servo motor through the connecting flange. The ball screw, linear guide, worktable, and bed in the model of the classical drive are the same as the nut-direct drive.

Classical drive.
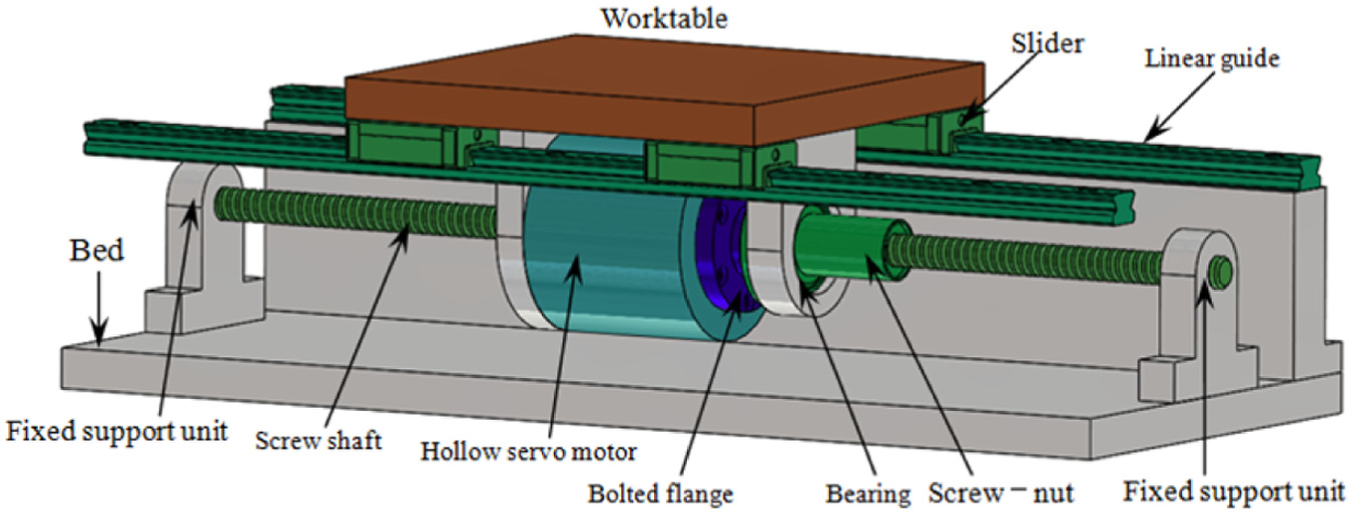
Nut-direct drive.
Mechanical model of the nut-direct drive compared with the classical drive
Dynamic models of ball screw feed systems and their parameters
In order to analyze the dynamic characteristic of the nut-direct drive compared with the classical drive, the dynamic models of the classical drive and the nut-direct drive are established using LPM as shown in Figure 3.

Dynamic models of (a) the classical drive and (b) the nut-direct drive with LPM.
The ball screw pair with DIK 2005 (type specification with THK from Japanese) is selected in the ball screw feed system. Based on Hertz theory, the axial stiffness of the preloaded ball screw considering the elastic deformation of balls can be expressed as follows

where Ka is the rigidity value provided by the manufacturer, P0 is the preload value, and Ca is the rated dynamic load of the ball screw.
For both ends fixed support of screw shaft, the equation of axial and torsional stiffness of screw shaft can be written as 12


where Ksa, Kst, E, l, L, d, and G are the axial stiffness, torsional stiffness, Young’s modulus, effective length, length, diameter, and shear modulus of the ball screw, respectively.
The torsional stiffness of the screw nut can be written as

where Ln, dn, and Dn and are the effective length, thread bottom diameter and diameter of the screw nut, respectively.
The parameters used in the models are listed in Table 1 using manufacturers’ catalogs or prior knowledge.
Parameters used in models of the classical drive and the nut-direct drive.

Dynamic modeling of the classical drive
For the classical drive as shown Figure 3(a), according to the stiffness synthesis principle, the synthesis axial stiffness of the ball screw shaft and the supporting bearing Ka1 can be written as

where Kt1 represents the synthesis torsional stiffness of coupling and screw shaft, which can be written as

As shown in Figure 3(a), according to Lagrangian energy method, 13 the kinetic energy of the classical drive system can be written as

According to the motion relationship of ball screw, xs1 of screw shaft can be written as

where iR is the transmission ratio of the ball screw,
The potential energy of the classical drive system can be written as

Let

The general forces and general coordinates are defined as


where Tm1 is the output torque of the servo motor for the classical drive .
By using the matrix form, Lagrange equation can be represented as follows 14

where


The equation of state-space equation (11) is expressed as follows

where U1, X1, and Y1 are the input variable, state vector, and output variable, respectively, A1, B1, C1, and D1 are the state matrix, input matrix, output matrix, and transfer matrix of the classical drive, respectively. They are defined as

Mechanical system integration of the classical drive.
Dynamic modeling of the nut-direct drive
For the nut-direct drive as shown in Figure 3(b), according to the stiffness synthesis principle, the synthesis of the ball screw shaft and the axial stiffness of the supporting bearings Ka2 can be written as

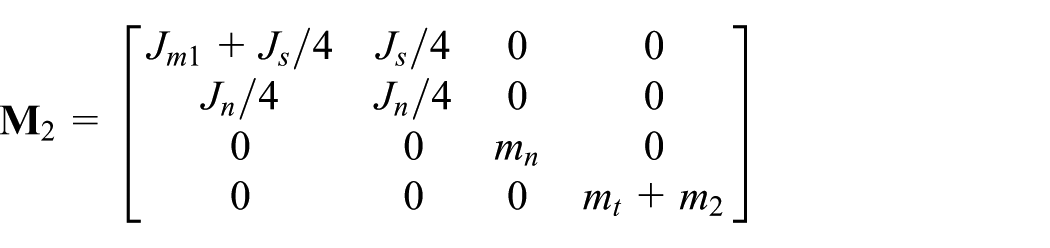
In the same way, the kinetic energy of the nut-direct drive system can be written as

According to the motion relationship of ball screw, xs2 of screw shaft can be written as

The potential energy of the nut-direct drive system can be written as

Let

The general forces and general coordinates for the nut-direct drive are defined as


By using the matrix form, Lagrange equation for the nut-direct drive is given as

where

The equation of state-space equation (18) is expressed as follows

where U2, X2, and Y2 are the input variables, state vector, and output variables; A2, B2, C2, and D2 are the state matrix, input matrix, output matrix, and transfer matrix of the nut-direct drive, respectively. They are defined as

Mechanical system integration of the nut-direct drive.
Frequency responses of the mechanical systems and experimental verification
Frequency responses of the nut-direct drive compared with the classical drive
Figure 6 shows the frequency responses of the classical drive and the nut-direct drive when the worktable locates in the middle position of the screw length. The first three-order natural frequency values of the classical drive can be obtained from Figure 6(a) as follows: fs1 = 191 Hz, fs2 = 1582 Hz, and fs3 = 2067 Hz. The first three-order natural frequency values of the nut-direct drive are fn1 = 219.6 Hz, fn2 = 3640 Hz, and fn3 = 17340 Hz. For the same ball screw system, the first-order natural frequency of the nut-direct drive is 28.6 Hz higher than the classical drive screw drive.

Frequency responses of (a) the classical drive and (b) the nut-direct drive.
Experimental verification
The experimental setup of the frequency response of the nut-direct drive is given as shown in Figure 7.

Experimental setup for the frequency response of the nut-direct drive.
To determine the frequency response of the nut-direct drive, the relationship between the input for the sinusoidal torque of hollow servo motor and the output for the acceleration of worktable is analyzed at different frequencies. In the experiments, the input excitation is the variable sinusoidal torque signal of the hollow servo motor. The output signals are the position signal of the rotating encoder of hollow servo motor, the position signal of the worktable, and the signal of the axial acceleration sensor. According to the calculated resonant frequency range of the nut-direct drive, the sinusoidal torque frequency range of 10–300 Hz is selected and measured every 5 Hz. The fitting curve of frequency response function is obtained according to the amplitude ratio between the torque input signal and the obtained acceleration signal of the worktable. 5 The experimental setup of the frequency response for the classical drive is the same as above. The experimental results of the classical drive and the nut-direct drive are obtained as shown Figure 8, which indicate that the resonant frequency of the classical drive is 190 Hz and the resonant frequency of the nut-direct drive is 225 Hz.

Experimental results of (a) the classical drive and (b) the nut-direct drive.
For the same ball screw system, the results of simulations and experiments indicate that the first-order natural frequency of the nut-direct drive is much higher than the classical drive. Therefore the nut-direct drive of ball screw feed system has better dynamic performance compared to the classical drive at high speed. This is because the screw shaft of the nut-direct drive is rigidly fixed at both ends without support bearings, which increases the stiffness of the system. Therefore, it is better to choose the nut-direct drive system as far as possible at high speed.
Influence of the mechanical system parameters on the natural frequencies
Influence of the preload of ball screw on the natural frequencies
In order to analyze preload of ball screw influence on the natural frequencies of the nut-direct drive system compared with the classical drive system, we changed the preload of ball screw as 1% of P0 (the rated dynamic load of the ball screw), 10% of P0%, and 100% of P0. Figure 9 shows the preload of ball screw influence on the natural frequency values, which indicate that the natural frequency values of both drive systems increase with the increase in the preload of ball screw. However, the preload change of ball screw influences the first three-order natural frequency values of the classical drive as shown in Figure 9(a) and main influences the first-order natural frequency of the nut-direct drive as shown Figure 9(b).

Influence of the preload of ball screw on the natural frequencies. Frequency responses of (a) the classical drive and (b) the nut-direct drive.
Influence of the mass of worktable on the natural frequencies
We change the mass of worktable as 20, 30 and 40 kg to analyze the mass of worktable influence on the natural frequency values of the nut-direct drive system compared with the classical drive system. Figure 10 shows the mass of worktable influence on the natural frequency values, which indicates that the first-order natural frequency values of both drive systems decrease with the increase in the mass of worktable. However, the mass of worktable influences the first three-order natural frequency values of the classical drive as shown in Figure 10(a) and mainly influences the first-order natural frequency value of the nut-direct drive as shown in Figure 10(b).
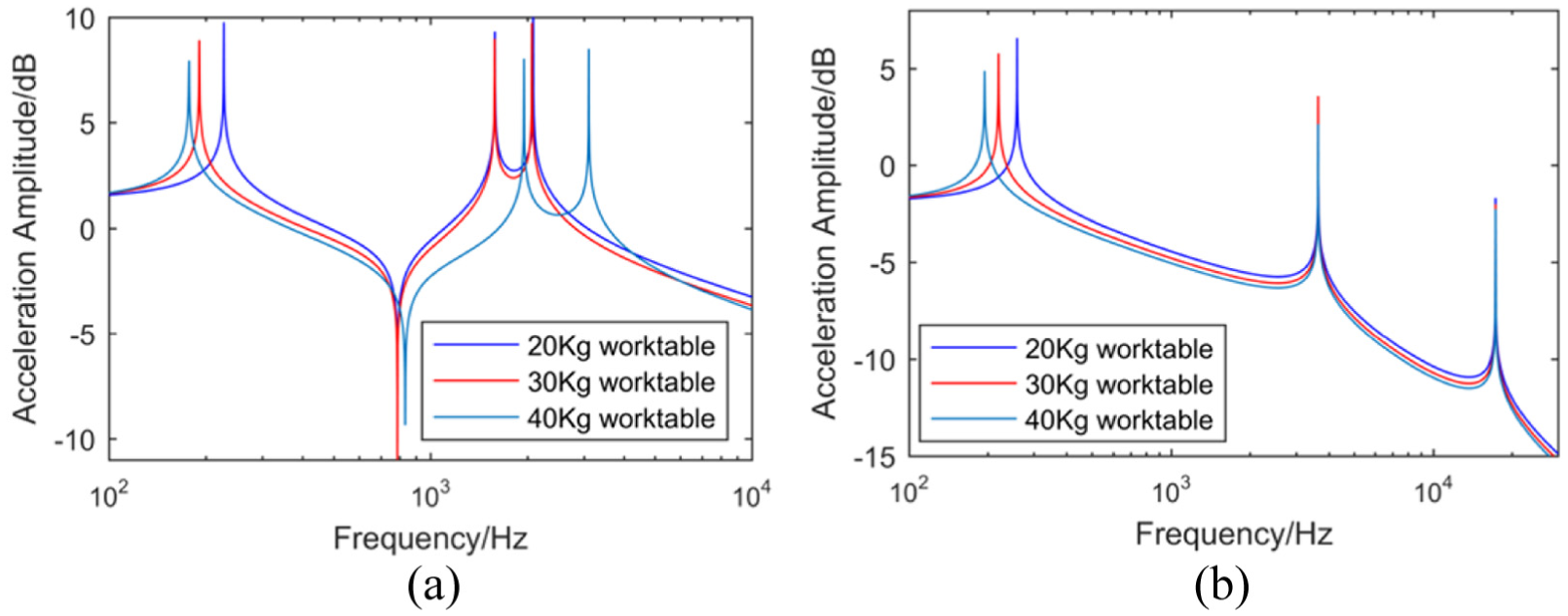
Influence of the mass of worktable on the natural frequencies. Frequency responses of (a) the classical drive and (b) the nut-direct drive.
Influence of the worktable position on the natural frequencies
Figure 11 shows that worktable position influences the first-order natural frequency value of the nut-direct drive compared with the classical drive. Figure 11 indicates that the first-order natural frequency value is lowest when the table locates in the middle position of lead screw for both drives due to the minimum stiffness of screw in the middle position.

Influence of the worktable position on the natural frequencies.
Influence of the length of screw shaft on the natural frequencies
Figure 12 shows that the first-order natural frequency value of the nut-direct drive only slightly reduces by changing the length of screw shaft. With the increase in the length of screw shaft, the first-order natural frequency value of the classical drive reduces faster than the nut-direct drive. Figure 12 indicates that with the increase in the length of screw shaft, the dynamic characteristic advantage of the nut-direct drive is more obvious.

Influence of the length of screw shaft on the natural frequencies.
Influence of the nominal diameter of screw shaft on the natural frequencies
Figure 13 shows that with the increase in the nominal diameter of screw shaft, the first-order natural frequency value of the nut-direct drive increases faster than the classical drive. Therefore, the bigger the nominal diameter of screw shaft, the advantage of the nut-direct drive is more obvious.

Influence of the nominal diameter of screw shaft on the natural frequencies.
Coupling analysis of the mechanical system and the control system
To analyze the coupling of the mechanical system and the control system, the mechanical systems (Figures 4 and 5) are integrated into the control system in the Simulink when the worktable is located in the middle position of the screw shaft length as shown in Figure 14. For comparative analysis of the classical drive and the nut-direct drive, both systems set the same control parameters. The control parameters used in the model are listed in Table 2.

Integration of the mechanical system and the control system.
Control parameters used in the model.

Figures 15 and 16 show the comparisons of step responses and position tracking accuracy of the integration of mechanical systems and control systems, respectively. Figure 15 shows that step response of the nut-direct drive is slower than the classical drive in the initial stage. This is because the equivalent moment of inertia of the nut-direct drive is larger than the classical drive. But overall, step response of the nut-direct drive is faster than the classical drive under the same control parameters. Figure 16 shows that amplitude of the nut-direct drive is larger than the classical drive under the same control parameters, which indicates that position tracking error of the nut-direct drive is smaller than the classical drive.

Comparisons of step responses.

Comparisons of position tracking accuracy.
Conclusion
In this article, we designed the nut-direct drive compared with the classical drive using the same type ball screw. Dynamic models of the classical drive and the nut-direct drive were established based on LPM, respectively. Furthermore, the mechanical systems of the classical drive and the nut-direct drive were integrated into the control system using the same control parameters to analyze the influence of the mechanical system on position tracking accuracy. The main conclusions are as follows:
The frequency response analysis of the classical drive and the nut-direct drive was analyzed, which indicated that the nut-direct drive system has better dynamic performance than the classical drive at high speed. This was because the screw shaft of the nut-direct drive was rigidly fixed at both ends without support bearings, which increased the stiffness of the drive system.
Influences of the preload of ball screw and the mass of worktable on the natural frequency values ware analyzed, which had different effects on the classical drive and the nut-direct drive. The results of influence of screw shaft length and screw shaft nominal diameter on the first-order natural frequency value indicated that the first-order natural frequency value of the classical drive reduces faster than the nut-direct drive with the increase in the screw shaft length and screw shaft diameter, respectively. Therefore, the bigger the screw shaft length and screw shaft nominal diameter, the advantage of the nut-direct drive is more obvious compared to the classical drive.
The mechanical systems of the classical drive and the nut-direct drive were integrated into the control system using the same control parameters, which indicated that the designed nut-direct drive has faster responsiveness and better position tracking accuracy than the classical drive.
Footnotes
Handling Editor: Zengtao Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was fully supported by the Science and Technology Development Plan of Shandong Province (no. 2015GGX103036), the National Natural Science Foundation of China (no. 51375266), Young Science Foundation Project of China (no. 51705289), and the Natural Science Foundation of Shandong Province of China (no. ZR2017PEE005).