
Abstract
Cats protract claws while hunting or pawing on the ground and retract to muscles when relaxing. Inspired by this behavior, and in order to solve the problem of short service life and low comprehensive drilling efficiency of polycrystalline diamond compact bits which results from its poor adaptability to soft-hard interbedded strata, a self-adaptive bionic polycrystalline diamond compact bit was designed, which can use the elastic element to adjust its back-rake angle according to the formation hardness to improve the adaptability of polycrystalline diamond compact bits. Theoretical analysis and drilling test results show that the self-adaptive bionic polycrystalline diamond compact bit has a strong adaptability to soft-hard interbedded rock strata. When drilling in soft rock, the back-rake angle is small and the rate of penetration is high; when drilling in hard rock, the angle becomes larger to reduce the abnormal damage of cutters. Thus, it can improve the integrated drilling efficiency and service life of polycrystalline diamond compact bits. In the whole drilling test, the average penetration rate of the self-adaptive bionic polycrystalline diamond compact bit increases by 10%–13% over conventional polycrystalline diamond compact bits with the same dimension and material.
Keywords
Introduction
Polycrystalline diamond compact (PDC) bits are widely used in the fields of oil drilling and geological exploration because of their high rock-cutting efficiency, long service life, and less drilling faults.1,2 Especially in soft- and medium-hard rock formation, the drilling efficiency and service life are much higher than cone bits and cemented carbide bits. 3 However, when drilling in non-homogeneous soft-hard interbedded strata, their advantage of high rate of penetration (ROP) is difficult to play due to the difference of stratigraphic lithology. In addition, the abnormal damage of cutters is exacerbated easily (fragmentation and delamination of polycrystalline diamond layers, etc.), leading to early failure of the whole PDC bits4,5 and changing bits frequently during the trip that the drilling efficiency decreases. Currently, there are two ways to reduce the drilling auxiliary time and improve the drilling efficiency, one is to improve the strength of the PDC and the other is to design the PDC bits reasonably.6,7 In designing PDC bits, scholars8,9 at home and abroad mainly focus on special design based on the characteristic of a certain stratum. For example, in order to increase the ROP in the glutenite formation of the Pearl River Mouth Basin (PRMB) oil field, HY Zhu et al. 10 designed a specialized PDC bit with six blades of a new tiger tooth and an anticollision tooth to increase its shock and wear resistance. The results show that the footage and the ROP of this new bit all have a great improvement. In addition, for the complex formation in Western South China Sea oilfields, HY Zhu et al. 11 established the prediction models of rock mechanics parameters based on the rock properties (drillability, plasticity, abrasiveness, and so on) and optimized the PDC bits for the different prediction models. For the plastic mudstone formation, a TS1952SS PDC bit (five blades with φ19-mm cutters) was designed to improve the bit aggressivity and increase the rotary speed. For the interbedded formation with some mudstone and glutenite, an ST636RS PDC bit was designed to seek balance among the aggressivity, shock resistance, and wearlessness. To be more efficient and lower cost when drilling stiff brittle rocks, hammer drilling is an attractive technology. G Han and M Bruno et al. 12 first investigated the fundamental rock physics in percussion drilling through a series of lab tests and theoretical simulations which can further promote its applications in hard formation. In addition, O Yarali and S Kahraman 13 studied the relations between the drillability of rocks and the different brittleness values by testing 32 different rock types in the laboratory. The results showed that B8 (the half of the product of compressive strength and tensile strength), a definition of brittleness which can be well used for the assessment of rock drillability. Although the drilling efficiency of these bits for certain stratum has improved, when drilling in the soft-hard interbedded strata, their integrated drilling effect is not often ideal. Therefore, it is necessary for us to design a PDC bit which can adapt to strata with different characteristics.
The back-rake angle of PDC bit is an important parameter which directly affects the drilling performance. Based on the study of the effect of back-rake angle on the force of PDC cutters, LE Hibbs and DJ Flom 14 proposed that the reasonable back-rake angle is 10°–20°. Through the indoor bench test, Hoover and Middleton 15 showed that PDC bits with back-rake angle of 20° have the best drilling performance in sandstone, and the failure and wear of cutters with a back-rake angle of 25° is significantly less compared with 20° in hard granite. Zhang et al. 16 used turning tests to study the effect of back-rake angle on drilling performance and pointed out that the larger the back-rake angle is, the more the abnormal wear of cutters can be reduced. On the contrary, the smaller the back-rake angle is, the higher the drilling rate will be; but, the service life will be decreased. Those studies above showed that when PDC bits drill in soft rock, a small back-rake angle of cutters is more conducive to ROP; when drilling in hard rock, the back-rake angle should be appropriately increased to reduce the abnormal wear of bits. However, the back-rake angle of conventional PDC bits is a fixed value, and it cannot change with the hardness of the strata when drilling in non-homogeneous soft-hard interbedded strata. Thus, that will cause the cutters unable to adapt to the strata and lead to poor integrated drilling efficiency.
After hundreds of billions of years of evolution, the creatures in nature have formed unique body structures and excellent characteristics and also own a good adaptability to the living environment. 17 This adaptability of creatures not only contributes to their own survival and reproduction but also provides a good solution to many human’s technical problems. Cats are the only mammals on land whose claws can protract and retract freely. 18 When hunting or pawing on the ground, they can catch preys or hold the surface tightly by protracting their claws; when relaxing, their claws retract into muscles to keep them sharp. 19 This self-adjusting feature of cat claws provides us with a good inspiration to design a self-adaptive cutter for PDC bits.
In this article, we take cat claws as our bionic prototype and introduce their self-adjusting property into the design of PDC bit. The cutters of this bit can adjust automatically with the formation hardness to solve the problem that conventional PDC bit has poor adaptability to the soft-hard interbedded strata and improve the integrated drilling efficiency. At the same time, the feasibility and effectiveness of this bit are further verified by mechanical analysis and drilling tests.
Anatomy structure of cat claws and the model of PDC cutter
Anatomy structure of cat claws
Figure 1 shows the morphological features of the skeleton when cats contract and protract their claws. By analyzing their sole structure of toe, we can find that the sole structure is modally constructed by three segments of phalanges linked to each other as a flexible extremity for touching. Superficial flexor tendon and digital flexor tendon connect and drag the phalanges to the metacarpal bone on top and bottom sides to form a foldable compliant bone structure. The claw is attached to the distal phalanx with a tough elastic ligament. Cats protract or retract their claws mainly relying on the function of elasticity ligament. 19 When resting, the claw is usually retracted and hidden into the muscles of the toe by natural elasticity of the attached ligament. During claw protrusion, the distal phalanx rotates around the joint of the middle phalange to protrude the claw when the flexor muscles overcome the tension provided by elasticity ligament. And at this time, the elasticity ligament is stretched approximately two and a half times its resting length. 20 The joints of the digital skeleton are contained within synovial fluid which has elastic as well as viscous properties, and Young’s modulus (tensile stress/tensile strain) for the digital synovial joints is considerably less than for the elasticity ligament. 21

Anatomy structure of cat claws: (a) retract claw and (b) protract claw. 22
Model of self-adaptive bionic PDC cutter
Inspired by the connective structure between phalanges, joints, and elastic ligaments of cat toes, and combined with the structural characteristics of PDC bits, we established a physical model of PDC cutter which mainly includes supporting body, steel body, PDC sheet, and elastic element (Figure 2).

Model of self-adaptive bionic PDC cutter.
In the whole structure, the connection between the supporting body and the steel body is similar to the function of joints among phalanges that the supporting body can rotate around the steel body. The PDC sheet on the supporting body acts as the cat claws to cut rocks. The elastic element acts as the elastic ligament to adjust the back-rake angle of the cutter. When the elastic element is compressed, the angle of the cutter becomes large. According to the compression of the elastic element, the magnitude of back-rake angle can be adjusted. In the process of cutting rock, the self-adaptive control principle of the PDC cutter is shown in Figure 3. When drilling from soft rock to hard rock, the back-rake angle becomes large, and the cutting depth becomes shallow.

Self-adaptive control principle.
Mechanical analysis
Generally speaking, the mechanism for PDC bits breaking rock is pressing and cutting, that is, PDC cutters press into the rock under the axial load and then cut the rock by horizontal tangential force.
23
Now the mechanical analysis of self-adaptive PDC cutter has been studied. First, we set a cutting depth h of PDC cutter under the axial force
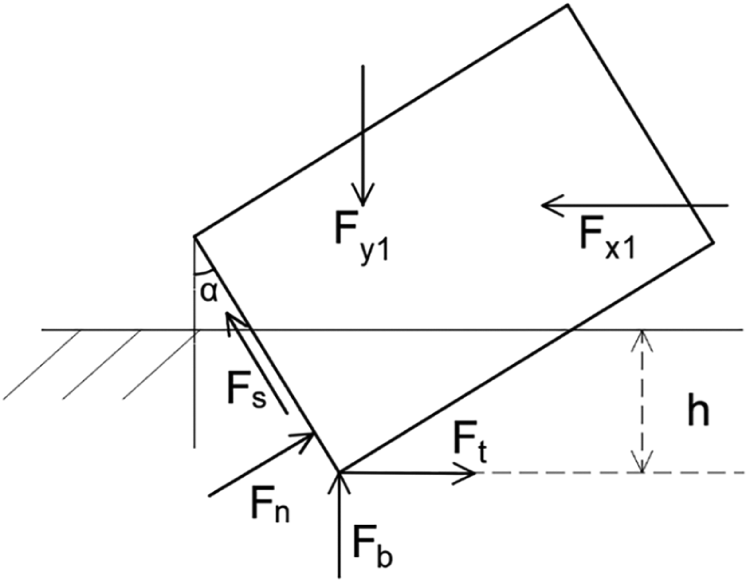
Force schematic diagram of PDC sheet.

Force schematic diagram of elastic element.
Take any cross-section from the fixed end O, then the moment equation is

where

The cantilever angle equation is obtained by one integration

where
According to the force of cantilever beam, the maximum rotation angle of the beam occurs at the free-end face

According to formula (4), we know that the changing angle


where
Suppose that

The condition of PDC cutter breaking rocks is 23

where
From equations (5)–(8), we can determine the horizontal tangential force needed for PDC cutter to break rocks

where k represents the ratio of horizontal tangential force to axial force;
Under the certain pressure, the relationship between the cutting depth of PDC cutter and the hardness is as follow 24

generally,
Combining equations (4), (9) and (10), we can obtain the relationship between the hardness and the back-rake angle

From equation (11), it can be seen that the back-rake angle of self-adaptive PDC cutter increases with the rock hardness, and rocks with a certain hardness corresponds to a suitable back-rake angle. In this article, we need to design a self-adaptive PDC bit which can automatically adjust its back-rake angle and cut rocks of different hardness with reasonable cutting angles.
Design and preparation of self-adaptive bionic PDC bit
A self-adaptive bionic PDC bit was designed according to the established model of PDC cutter. The main structural parameters of the bit are as follow, outer diameter is 75 mm, inner diameter is 49 mm, the initial angle is 5°, and the back-rake angle varies from 5° to 28°. PDC sheets are the type of 1304 (diameter is 13.44 mm and thickness is 4 mm). The structure of self-adaptive bionic PDC bit consists of a single cutter, elastic element, and steel body.
As shown in Figure 6(a), the single cutter consists of a supporting column, a PDC sheet, a pin shaft, and a spring. The PDC sheet is welded at the bottom of the supporting column with the inclined angle of –5°. The supporting column connects with the steel body by pin shaft and can rotate around the pin shaft. The material of the supporting column and the pin shaft are high-strength structural steel and are processed by wire-cutting technology to match the inner and outer diameter of the steel body. There is a spring between the pin shaft and the supporting column to limit the movement of the pin shaft.

Structure design of self-adaptive bionic PDC bit: (a) PDC cutter, (b) elastic element, and (c) steel body.
The elastic element is shown in Figure 6(b), which is U-shaped to reduce the stress concentration. The material is spring steel, which is also processed by wire-cutting technology and quenched and heat treated to increase its elasticity. Since the theoretical maximum horizontal load on the cutters when drilling into different hard rocks is about 2600–3000 N, 25 and in order to ensure the elastic element can bear such a load without plastic deformation, a compressive capacity experiment of four elastic elements was done with different thickness (1.0, 1.5, 1.8, and 2.0 mm) under three different loading distances (L = 19, 22, and 25 mm). The result shows that the parameters with thickness as 2 mm and loading distance as 22 mm are better for the design of elastic element. And with this thickness, the maximum elastic deformation angle of the elastic element is about 23.5°. Due to the complicated conditions in the hole and in order to further ensure that the elastic element does not produce deformation during the actual drilling process, which will lead to the failure of the bit, a mechanical limit design is performed on the steel body, as shown in Figure 7. When the back-rake angle of the cutters increases by 23°, the supporting column will no longer rotate, so that the deformation of the elastic element is always within the elastic range to protect itself. When installing, we just squeeze the sides of the elastic element to shrink it and then insert it into the mounting groove of the steel body and the supporting body. Also, there is a protruding block on one side of the elastic element, matching the limiting groove of the steel body to limit its displacement. At last, the curved top of the U-shaped elastic element is welded.

Limiting mechanism on steel body.
Steel body is the matrix of the bit, as shown in Figure 6(c), which mainly includes inner and outer nozzles, U-shaped slots for mounting elastic elements, and curved slots for mounting supporting columns. The inner and outer nozzles are designed on both sides of U-grooves to provide the flow channel for the flushing fluid. The material of the steel body is low-alloy steel, which is processed by numerical control (NC) machining technology.Figure 8 shows the whole design of the self-adaptive PDC bit, and the prepared product is shown in Figure 9.

Design diagram of self-adaptive bionic PDC bit.

Prepared product of self-adaptive bionic PDC bit.
Performance testing of self-adaptive bionic PDC bit
The test device mainly composes of XY-1 vertical shaft drilling rig, PMB-50 mud pump, QDX sewage pump, rock box, mud tank, and drilling parameter detection and control system with various sensors which can detect the drilling pressure, the rotating speed, the torque, the ROP, and the other drilling parameters in real-time (Figure 10). In the test, the tested rock is fixed in the rock box using two strong screw-bolts. The XY-1 drill rig drives the spindle pipe and single-core barrel with an attached drill bit. The drilling fluid delivered by the PMB-50 mud pump from the mud tank into the spindle pipe passes continuously over the core inside the barrel down to the drill bit, then the fluid with debris flows into the rock box, and after sedimentation, the fluid is pumped back to the mud tank by the sewage pump installed inside the rock box.

Bit test device.
The parameters, that is, the weight on bit (WOB), rotation speed, torque of bit (TOB), and ROP, are continuously measured and recorded during coring runs. Two pressure sensors of SSI-P51 type are installed in the upper and lower chambers of the feeding oil cylinders of the drill rig to measure the pressure in the hydraulic system. The WOB is then estimated by dividing the pressure difference in the upper and lower oil chambers by the section area of the piston rod. A torque sensor of LKN-205 type is installed between the spindle pipe and the core barrel to measure the torque. A built-in tachometer wheel is mounted at one end of the rotary shaft of the LNK-205 torque sensor, and a light-emitting diode and a phototransistor are installed on the sensor housing to measure the rotation speed. A WEP-50 drawstring displacement sensor is installed on the shell of the drill spindle to measure the drill pipe stroke and convert the relative displacement to the ROP. Finally, all data are transmitted and stored in the computer.
Testing the back-rake angle of self-adaptive bionic bit
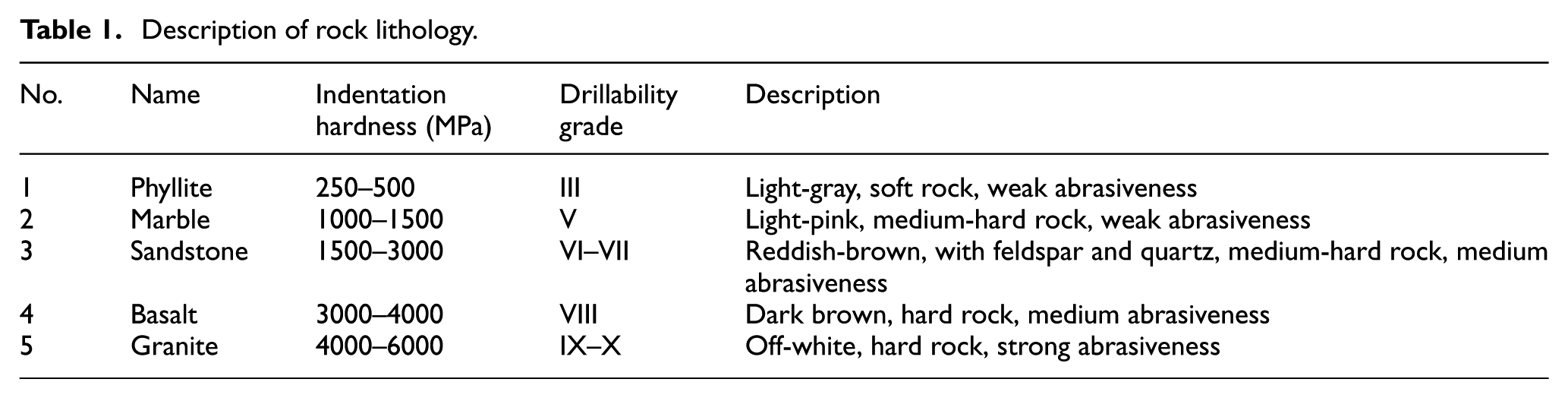
The lithology and drillability of rocks chosen for test are shown in Table 1. A constant WOB and rotating speed are used in the drilling process. In the test, we first set the rotating speed at the predetermined value and increased the WOB slowly to the constant value. Then drilling was kept steady to observe and record the change of the back-rake angle. After drilling about 5 mm in depth, we maintained the WOB constant and reduced the speed to 0, then stopped the pump and measured the angle.
Description of rock lithology.
Comparative drilling test between self-adaptive bionic PDC bit and conventional PDC bits
We compared the ROP of self-adaptive bionic PDC bit with conventional PDC bits when drilling in the artificial soft-hard interbedded strata to examine the actual drilling efficiency of self-adaptive bionic PDC bit. The parameters of conventional PDC bits are the same with the self-adaptive bionic PDC bit except the back-rake angles which are 15° and 20°, respectively (Figure 11). And the soft-hard interbedded strata are poured by cement mortar, as shown in Figure 12.

Conventional PDC bits: (a) back-rake angle of 15° and (b) back-rake angle of 20°.

Artificial soft-hard interbedded strata.
Results and discussion
Results and discussion about the back-rake angle of self-adaptive bionic bit
Figure 13 shows the relationship between the back-rake angle and the hardness when self-adaptive bionic PDC bit drilled in different kinds of rocks. As can be seen from the figure, the angle of the self-adaptive bionic PDC bit is different. When drilling in soft phyllite, the angle changes smallest; and when drilling in hard granite, the angle changes largest. Concretely, the back-rake angle increased in the order of phyllite, marble, sandstone, basalt, and granite, and the measured value is shown in Table 2.

Changes of back-rake angle when drilling in different kinds of rocks: (a) phyllite, (b) marble, (c) sandstone, (d) basalt, and (e) granite.
Record data of the back-rake angle.
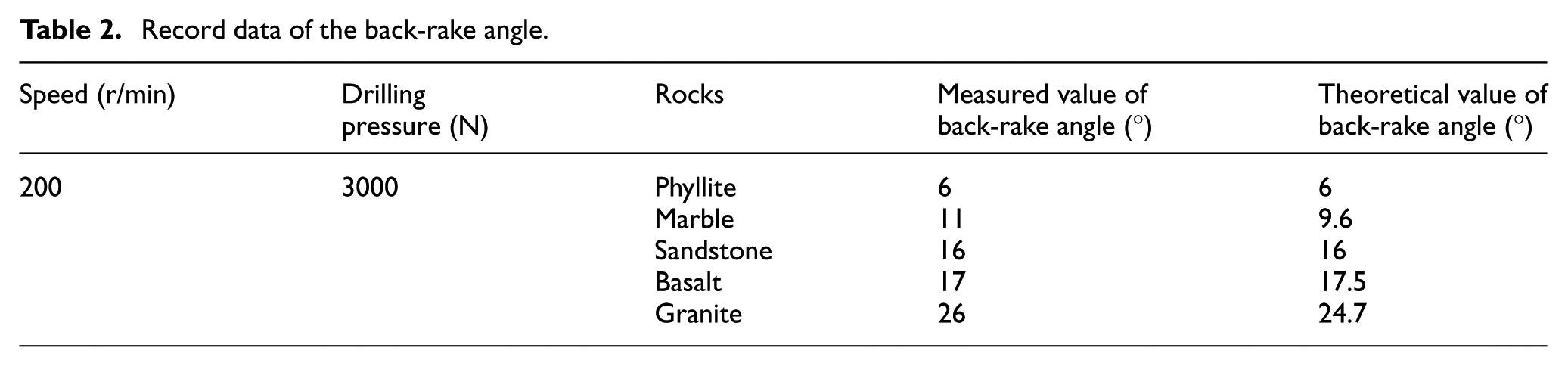
According to the formula (11) and the measured data in Table 2, the relationship between the hardness and the back-rake angle can be obtained (Figure 14). The curve in the diagram shows that the fitting level between the measured value of back-rake angle and the theoretical value is high. That is to say, the self-adaptive bionic PDC bit can meet the design requirement.

Relationship between rock hardness and back-rake angle.
Results and discussion about the comparativedrilling test
When drilling in soft-hard interbedded strata, the ROP of the self-adaptive bionic PDC bit and the conventional PDC bits is shown in Table 3, and the average penetration rate is shown in Figure 15.
ROP of PDC bits drilling in soft-hard interbedded strata.


Comparison of average penetration rate.
The data in Table 3 show that the rock hardness affects the ROP of PDC bits. The greater the hardness is, the lower the ROP becomes. When drilling in soft rock such as phyllite and slate, the ROP of self-adaptive bionic PDC bit is the highest, the second is the PDC bit with the back-rake angle of 15°, and the lowest is the angle of 20°. When drilling in medium-hard rock such as marble and limestone, the ROP of self-adaptive bionic PDC bit is roughly equal to the PDC bit with the angle of 15°, which is slightly higher than the PDC bit with the angle of 20°. When drilling in hard rock such as granite, the ROP of PDC bit with the back-rake angle of 20° is the highest, the second is the angle of 15°, and the self-adaptive bionic PDC bit is the lowest. It can be seen from Figure 13 that the average penetration rate achieved by self-adaptive bionic PDC bit is the highest, which is about 10% higher than the PDC bit with back-rake angle of 15° and about 13% higher than the angle of 20°. That is because the ROP (V M ) of PDC bits is related to the rock hardness during the drilling process, and the relationship between them is 23

where n represents the rotating speed, B represents the dynamic load factor, and the rest parameters have been defined above.
When the WOB and rotating speed are constant, the hardness and the back-rake angle are inversely proportional to the ROP. Thus, the ROP will decrease with the increase of the hardness and will be low with a big back-rake angle. In soft rock, the horizontal tangential force that acts on the PDC cutter is small, and the deformation of the elastic element is small. As a result, the back-rake angle increases less which is 6°–10°. Therefore, the ROP increased in the order of the PDC bit with back-rake angle of 20°, the PDC bit with back-rake angle of 15°, and the self-adaptive bionic PDC bit. In medium-hard rock, the angle of the self-adaptive bionic PDC bit is about 16°. And the ROP of self-adaptive bionic PDC bit is nearly equal to the PDC bit with back-rake angle of 15°, which is slightly higher than the PDC bit with back-rake angle of 20°.
According to formula (10), the larger the back-rake angle is, the smaller the cutting depth is. At the same time, with the cutting depth becoming shallow, the rock reaction force and friction force decrease. 26 Therefore, it can be concluded that the greater the back-rake angle is, the smaller the reaction force and friction are and less impact damage and wear to PDC sheets. 27 When the strength of PDC sheets are sufficient, the PDC cutters with back-rake angle of 15° are prone to suffer abnormal wear and impact damage which are harmful to the ROP. While the self-adaptive bionic PDC bit can reduce the abnormal damage by increasing its back-rake angle, the ROP is decreased. Finally, when drilling in hard rock, the ROP of these three PDC bits decreased in the order of the PDC bit with angle of 20°, the PDC bit with angle of 15°, and the self-adaptive bionic PDC bit.
In the whole drilling process, by adjusting the back-rake angle, the self-adaptive bionic PDC bit with a small angle obtained higher ROP when drilling in soft rock and with a larger angle reduced the abnormal damage and protected its cutters when drilling in hard rock. Thus, the integrated drilling efficiency of PDC bits was improved.
Conclusion
In this article, a self-adaptive bionic PDC bit inspired by telescopic claws of cat has been designed. The self-adaption and drilling performance have been evaluated through the mechanical analysis, the back-rake angle testing, and the ROP testing.
It is concluded that the self-adaptive bionic PDC bit can automatically adjust its back-rake angle according to the hardness of rock formation. When drilling in soft formation, the angle is small, and when drilling in hard formation, the angle becomes larger. When drilling in soft-hard interbedded strata, it can not only keep a high cutting efficiency in soft rock but also can effectively reduce the abnormal wear of PDC sheets in hard rock. Its average penetration rate increased by 10%–13% over the conventional PDC bits with back-rake angles of 15° and 20°. The self-adaptive bionic PDC bit can both improve the drilling efficiency and service life. It can be seen that introducing the self-adaption into the design of PDC bits is one of the effective ways to solve the poor adaptability of conventional PDC bits to the heterogeneous strata, and this study provides a new idea for subsequently designing bits with high performance. For the current self-adaptive bionic PDC bit, future work will be conducted on the aspects for more evaluation on drilling performance, and although the elastic element can achieve the adjusting function, it still needs to be optimized.
Footnotes
Acknowledgements
The authors thank all the anonymous reviewers for their fruitful remarks and comments.
Handling Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper was supported by the Program for JLU Science and Technology Innovative Research Team (JLUSTIRT), National Natural Science Foundation of China (Grant No. 41602370) and Natural Science Foundation of Jilin Province (Grant No. 20170520094JH).
{kind=link}