
Abstract
In this article, by using Lagrange energy method, we establish the dynamical model of a two degrees-of-freedom helicopter, which is subject to holonomic constraints. A control method based on Udwadia–Kalaba theory is proposed to achieve the trajectory tracking control of the 2-degrees-of-freedom helicopter. Different from traditional methods, this method could solve the constraint force of the mechanical system without adding additional parameters such as Lagrange multipliers. When initial conditions are compatible, we can use the nominal control which is based on Udwadia–Kalaba equation to control 2-degrees-of-freedom helicopter in real time. But when initial conditions have incompatibility, the simulation result could produce divergence phenomenon. To solve the trajectory tracking control problem of 2-degrees-of-freedom helicopter under incompatible initial conditions, a modified controller is proposed. We also make simulation contrast by different control methods to validate the effectiveness and superiority of the modified controller. Simulation results show that the modified controller can drive the 2-degrees-of-freedom helicopter to perfectly track the desired trajectory with less control cost and high control accuracy.
Keywords
Introduction
At present, there are many methods that focus on the trajectory-tracking control of 2-degrees-of-freedom unmanned helicopters. The control methods are mainly divided into two types: the methods based on model (such as linear–quadratic–regulator (LQR), linear–quadratic–Gaussian (LQG), and sliding mode control)1,2 and the methods based on experience (such as proportional–integral–derivative (PID), neural network control and fuzzy control).3,4 However, PID control is the most extensive one in the actual application. Owing to the risk of helicopter flight experiments and the huge cost of sensors, many research institutions use auxiliary flight device to simulate real flight and verify the control algorithm. First, the control algorithm is designed and validated on the auxiliary flight device. After that the designed algorithm is applied to a real small helicopter for actual flight test. According to the above view, this article establishes the dynamical model of the 2DOF helicopter with constraints by using Lagrange approach and designs a new kind of 2DOF helicopter flight control method to realize a small unmanned helicopter’s yaw and pitch movement.
Since Lagrange first established analytical mechanics 200 years ago, the dynamic modeling method of a constrained mechanical system is one of the core contents in the field of dynamical analysis. In most of the research results, the model is based on D’Alembert principle and virtual displacement principle. For constrained mechanical systems, Lagrange multipliers can be used to calculate the constraint force effectively. But in practical application, the calculation of Lagrange multipliers is not an easy task, especially for multi-degree-of-freedom complex systems. Udwadia and Kalaba5–7 at university of Southern California have carried on the long-term research in this domain and obtained many useful results, which are summarized to Udwadia–Kalaba equation. By using this method, we can simply establish motion equations of mechanical systems which are subject to holonomic constraints. By using this equation, we can obtain the analytic solution of the constraint force without solving the Lagrange multipliers. Udwadia–Kalaba theory has become an important breakthrough in the field of analytic dynamics. 8
Udwadia first made a preliminary research of the servo constrained control for the trajectory tracking of mechanical systems. Compared with traditional control methods, this method designed by Udwadia can be achieved without increasing the computational complexity, which also can accomplish precise trajectory control of mechanical systems. In combination with Udwadia–Kalaba theory, Chen systematically proposed the concept of servo constraint control of mechanical systems.9,10 In 2008, Chen solved the servo constraint problem on the basis of Maggi’s equation.11–12 It is believed that by reasonable design, servo control can be achieved to meet the needs of trajectory requirements. Based on Udwadia–Kalaba theory and Chen’s viewpoint, Schutte focused on the control problem of nonlinear mechanical systems with holonomic constraints and nonholonomic constraints. Then, Schutte 13 proposed a state feedback controller, which is verified by theoretical analysis and numerical simulation in 2010.
There are many research results on trajectory tracking control. For example, we can use PID control, adaptive control, robust control, fuzzy control, neural network control, or the integrated use of these control methods. The control method proposed in this article is essentially different from the conventional methods. In this article, the nominal control method based on Udwadia–Kalaba equation can accomplish the trajectory tracking control task of 2-DOF helicopter. The control torque will be analytically produced by the tail rotor, and the main rotor motor of 2-DOF helicopter can be solved by Udwadia–Kalaba equation. When we consider that initial conditions are compatible, the trajectory tracking control of 2-DOF helicopter can be achieved by traditional Udwadia–Kalaba theory. When initial conditions have incompatibility, we propose a modified controller to solve the trajectory tracking control problem of 2-DOF helicopter. We also make simulation contrast by different control methods to validate control effect further. Simulation results show that the control method possess a great control effect and high control accuracy. In general, this control method can enrich the classical control theory. It also has a very good application prospect in many fields such as automatic production line, logistics transportation, and intelligent robot, but this is the first time that the control method based on Udwadia–Kalaba theory is applied in the helicopter model.
The main contributions of this article are threefold. First, an explicit, closed-form expression of the nominal control required to precisely meet the trajectory tracking requirements of the 2-DOF helicopter is obtained by Udwadia–Kalaba equation. Second, a modified controller is presented on the basis of Udwadia–Kalaba equation to deal with the possible initial condition deviation from the constraints so as to drive the 2-DOF helicopter mechanical system to accurately track the pre-specified constraints. Third, we validate the stability of control system by the theoretical calculation with the Lyapunov function and verify the control effects which include control cost and control accuracy of the modified controller by comparing with other control methods.
The advantages of the control method can be summarized as follows: this control design is applicable to a wide range of tasks (which we summarize as constraint following), including trajectory following and set-point regulation. This control method can also follow nonholonomic constraints.
Udwadia–Kalaba theory for constrained mechanical system
In this section, we talk about the fundamental theory which is called Udwadia–Kalaba theory. The mathematical foundation of Udwadia–Kalaba theory is the Moore–Penrose generalized inverse matrix. We shall define an

we say that matrix
First, we consider an unconstrained mechanical system, whose configuration is described by the n generalized coordinates

with initial conditions

where the n × n matrix

Then, we should consider the constraints which are presented in the system. We can assume that this mechanical system obeys the following constraint equations which are in the form of

where

where
In the end, we can put constraint (6) as an additional constraint force which is imposed on the original unconstrained system to ensure the desired trajectory. Thus, the equation of motion of the system is rewritten in the form of

where
The solution of the constraint force in the Udwadia–Kalaba theory
Assuming that there exist m groups of constraint (6) and a corresponding n-dimensional virtual displacement vector v, we have

Let

where
Let

where


where superscript “+” represents Moor–Penrose generalized inverse, y is a random n-dimensional vector, and I is a unit matrix.
Since the sum of work done by the constraint force in the virtual displacement is 0, we have

According to the previous definition, we can obtain


Since

Equation (15) can be simplified as

As

By equation (12) we can obtain

Combining with equation (10), we have

Multiplying the matrix M on both sides of equation (20) and substituting

Equation (21) is called the Udwadia–Kalaba equation. Thus, constraint force of constrained system can be written in the form19–23

Remark 1
It is clear that the Udwadia–Kalaba equation (21) just uses some physical quantities. And there are no additional parameters such as Lagrange multipliers or similar variables in the constraint force equation (22). Thus, in practical applications, we can avoid the complex variables to solve the practical problems. Therefore, the Udwadia and Kalaba theory is more applicable to the actual in the aspect of dynamics analysis. 24
The dynamical model of 2-DOF helicopter
The 2-DOF unmanned helicopter is a complex nonlinear, strongly coupled multivariable system. 25 Nowadays, there are two common modeling methods for small unmanned helicopter. One of them is to obtain input and output data through experiments. For instance, the actual flight test data are directly established through the neural network to establish the dynamics model. But the controller based on this model needs a lot of experience or expert data. The other one is to obtain linear or nonlinear dynamic differential equations by theoretical calculation. 25 Some scholars consider the specificity of small helicopter and modify the existing model of large helicopters. They may be based on the structural features of small helicopter directly, and corresponding differential equations are established. Then, the unknown parameters in the equation are obtained by wind tunnel test. 25 The equations derived by these methods are very complex and have many parameters, which limit the practical application. In this article, the dynamical model of a 2-DOF small unmanned helicopter is established by Lagrange method, and the specific object diagram 26 is shown in Figure 1.

2-DOF helicopter material object.
The 2-DOF helicopter which includes two main rotor blades, two stabilizing wing blades, and a tail rotor uses a single-cylinder two-stroke engine to drive. 25 Compared with the general helicopter, the main rotor blade of the 2-DOF helicopter does not have freedom of flapping motion. There is a stabilizer fin under the main rotor. The main rotor adjusts the lift by changing the overall angle. The course is maintained or changed by the lateral force generated by the change of the rotor angle. 17 Through the above-mentioned physical model, the simplified model of the 2-DOF helicopter is shown in Figure 2 with rigid body and particle handling. 27

Simplified model of 2-DOF helicopter.
In the simplified dynamical model of 2-DOF helicopter, we only consider the force generated by the tail rotor and ignore its mass since the mass of the tail rotor is very small. The cross bar
Variables and parameters of the 2-DOF helicopter.

2-DOF: 2-degrees-of-freedom.
The kinetic energy of the system includes three parts: the vertical support rod
1. The kinetic energy of the vertical support rod
The moment inertia of the Z axis is

Therefore, the kinetic energy of the vertical support rod 1 is

2. At this point, the movement of the cross bar 2 is regarded as the rotation of the X axis, the Y axis and the Z axis, and its moment inertia is

The kinetic energy of the cross bar

3. Here, we assume that

Its velocity coordinates can be calculated as

Therefore, the kinetic energy of the main rotor with motor is

4. Eventually, the kinetic energy of the overall system can be written as

The gravitational potential energy of the system can also be written as

Then, we can obtain

Equation (30) can be put into the Lagrange equation (31)

where
According to the Lagrange method, the general equation of motion of a helicopter with 2DOF can be written as

where




Remark 2
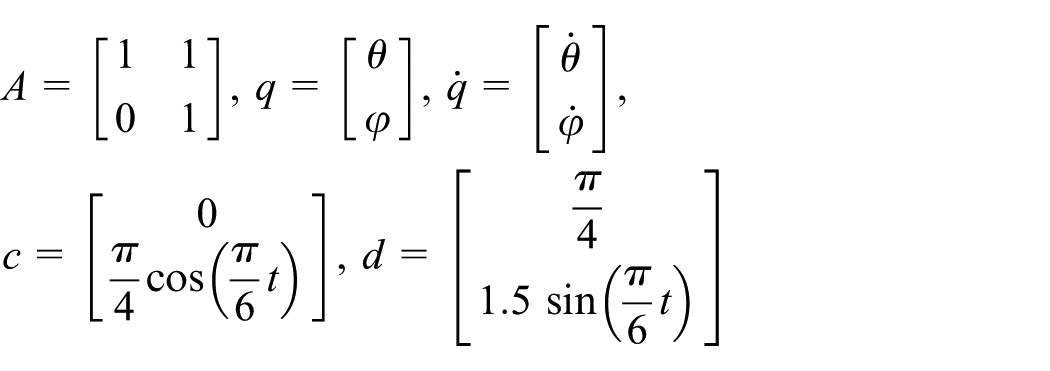
In matrix vectors, let
The 2-DOF helicopter dynamics model in generalized coordinates can be written as an unconstrained equation:
where

The system dynamics equations are denoted by Udwadia–Kalaba theory 26

By combining equations (33) and (34), we can get

From equation (22), we know

Under the effect of the constraint force
Trajectory tracking control of 2-DOF helicopter
Here, the pitch angle
1. It is assumed that the system needs to meet the trajectory tracking constraints 24 due to some performance requirements, which are given as

2. Differentiating the constraint equation (36) with respect to t twice, 24 the second-order constraints can be obtained

Hence, the system’s constraints can be written in the form of equation 31

where

Remark 3
We handle some performance requirements of the helicopter as constraints. As a simple illustration, we just introduce holonomic constraint (36) as the desired system performance to demonstrate the effectiveness of the control method based on Udwadia–Kalaba theory. Of course, our method can also be used to deal with nonholonomic constraints. We can differentiate the nonholonomic constraints with respect to t once and obtain the second-order form of constraint equation which is needed in the Udwadia–Kalaba theory.
3. According to Udwadia–Kalaba theory, in order to meet the trajectory requirements of 2-DOF helicopter, the corresponding motor torque should be exerted on the main rotor and tail rotor. Then, comparing equations (32), (34), and (35), we can get

where
Remark 4
We can validate the effectiveness of the designed control system by detailed theoretical analysis. 7
Initial conditions, compatibility, and incompatibility
The phenomenon of incorrect initial conditions
In general, if we apply the Udwadia–Kalaba theory directly, the constraints must be satisfied at each instant of time during the operation including the initial time
Differentiating the constraints equation (36) with respect to t once, 17 we can obtain

We will represent equations (36) and (40) in the matrix form


where
Equation (37) can be decomposed as

Integrating equation (43) with respect to t twice, we can obtain

According to Udwadia–Kalaba theory, combining equation (6) with equations (43) and (44), we can know that the control torque
Remark 5
In fact, Udwadia–Kalaba equation only solves the problem by substituting second-order constraint. But the zeroth-order constraint which corresponds to the second-order constraint is not the only one. We can write out its general solution by mathematical calculation. Then, we can determine its specific general solution form by initial conditions.
The solution of incorrect initial conditions
In order to deal with the problem of initial conditions which have incompatibility with the desired constraints, we attempt to modify the controller (39).
Assumption
For each
On the basis of the Udwadia–Kalaba theory, a modified controller can be given as 24

where


k is a positive scalar and P is a positive definite and real symmetric matrix.
Remark 6
Let

Differentiating the constraint equation (48) with respect to t, we can obtain

Theorem
Subject to Assumption, consider system (32). The control (45) renders the following performance.
Uniform stability: For each
Convergence to zero

Proof
We choose a rational Lyapunov function

By analyzing this Lyapunov function, we can obtain

where
Since

Differentiating equation (51), we can obtain

Now, we shall analyze each term of equation (54) separately.
First, we know
Then, combining equations (47) and (54), we can obtain

Substituting equations (55) and (56) into equation (54), we can obtain

Hence, we have

By Lyapunov second method stability criterion, and combining equations (53) and (58), we can obtain the system is stable. In addition, we can conclude the convergence of
Remark 7
Our aim is to render the movement of 2-DOF helicopter to follow the target constraint trajectory (36). When initial conditions have compatibility, we can use the traditional Udwadia–Kalaba theory to solve the trajectory tracking control problem. When initial conditions have incompatibility, we can use the modified controller
A specific control flowchart is shown in Figure 3.
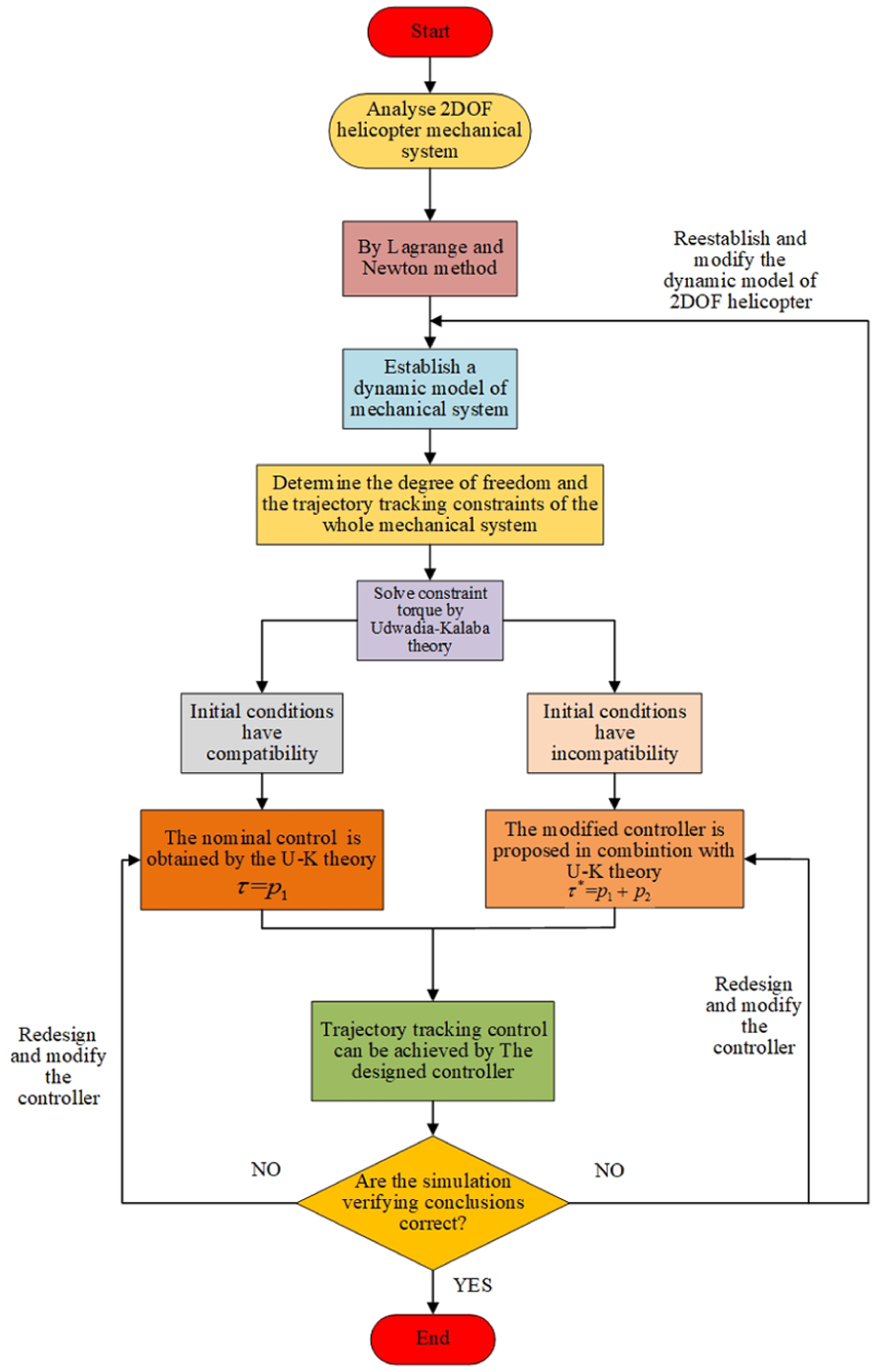
Modeling and control flowchart.
Simulation test and result analysis
In order to accomplish the trajectory tracking control of the simplified model of 2-DOF helicopter, we use MATLAB software for simulation test. Runge–Kutta method is used to solve the system’s ordinary differential equations. 24 According to the actual 2-DOF helicopter, we estimate the relevant parameters and the specific simulation parameters which are shown in Table 2.
Parameters for simulation.

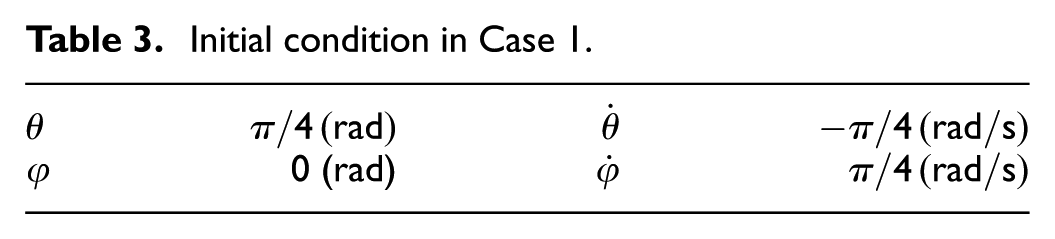
Case 1. The simulation results and analysis of compatible initial conditions
First of all, according to the actual motion state, initial conditions in the simulation are set. By letting
Initial condition in Case 1.
Here, we give the desired trajectory of the 2-DOF helicopter as

The control torques are generated by the two motors, which can be obtained from equation (39). The control torque of the main rotor motor is shown in Figure 4 and the control torque of the tail rotor motor is shown in Figure 5. Figures 6 and 7 show the pitch angle

Case 1: The control torque of the main rotor motor

Case 1: The control torque of the tail rotor motor

Case 1: The curve of the pitch angle

Case 1: The change curve of yaw angle
The plot of error

Case 1: Error
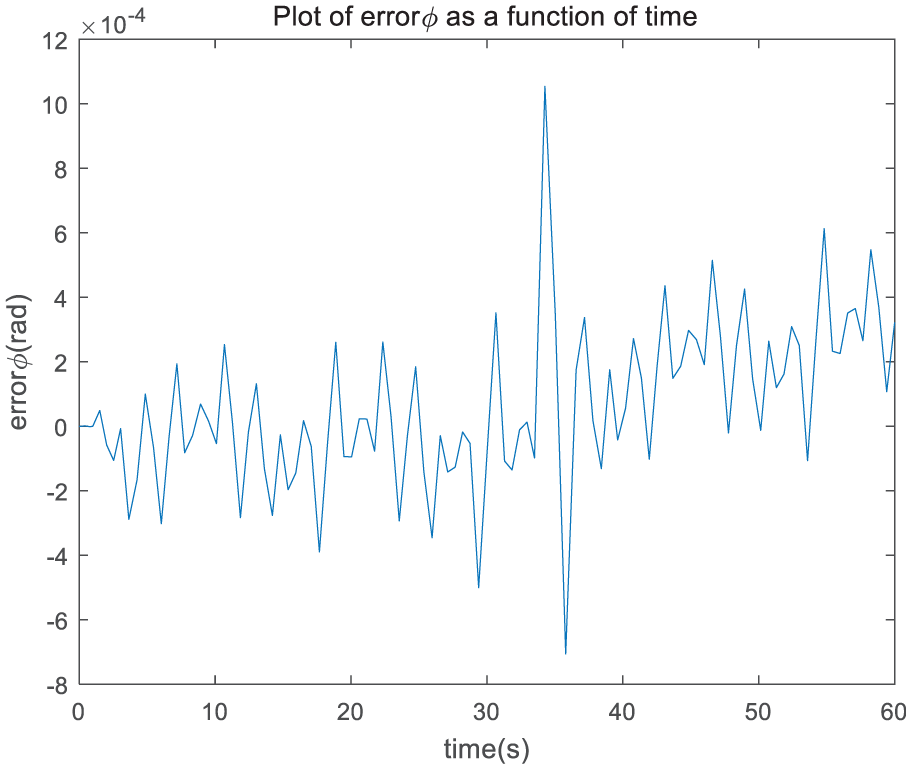
Case 1: Error

Case 1: The composite trajectory change curve of 2-DOF helicopter
From Figures 6 and 7, we can see that there is no divergence phenomenon. From Figures 8 and 9, we can know that the final error value is of the order of
Therefore, when initial conditions are compatible, the simplified model of the 2-DOF helicopter is able to achieve the required trajectory tracking constraint under the nominal control
Case 2: the simulation results and analysis of incompatible initial conditions with different control methods
Now, we give a set of initial conditions which are shown in Table 4. It is obvious to find that initial conditions do not satisfy the constraints (36) and (40).
Initial condition in Case 2.

Aiming at the incompatible initial conditions which are mentioned above, we use the modified controller
Here, we still give the same incompatible initial values as in Table 4 and choose the control parameters as
Compared with the newly developed control method in Yu et al. and Sun et al
We chose the nominal control

Case 2: Comparison of the tracking performance

Case 2: Comparison of the tracking error

Case 2: Comparison of the tracking performance
Case 2: Comparison of the tracking error

Case 2: Comparison of the composite trajectory change curve of 2-DOF helicopter
Case 2: Error

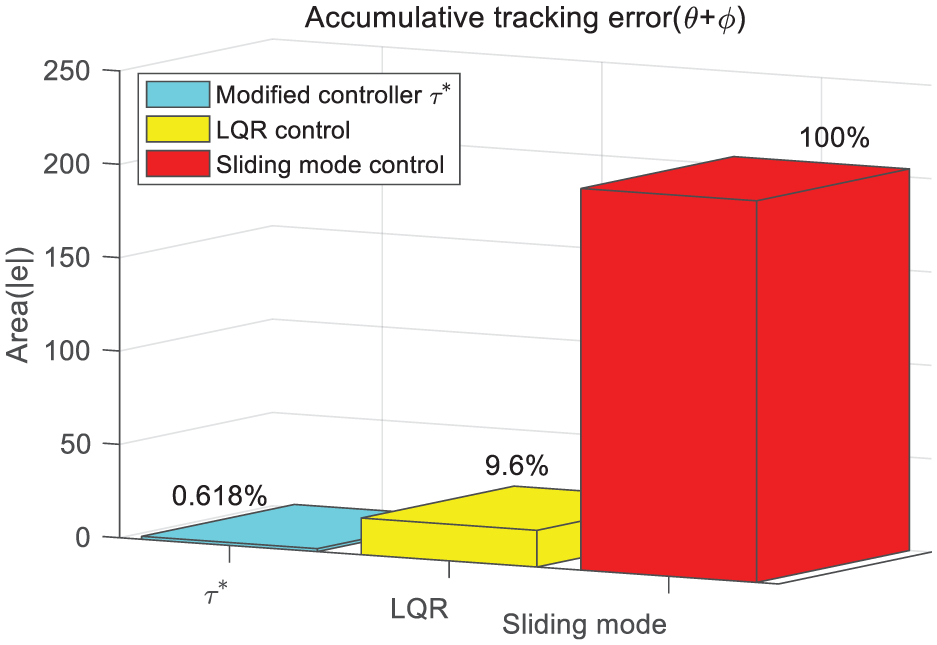
Case 2: Comparison of the accumulative tracking error

Case 2: The control torque of the main rotor motor

Case 2: Comparison of the control cost

Case 2: The control torque of the tail rotor motor

Case 2: Comparison of the control cost
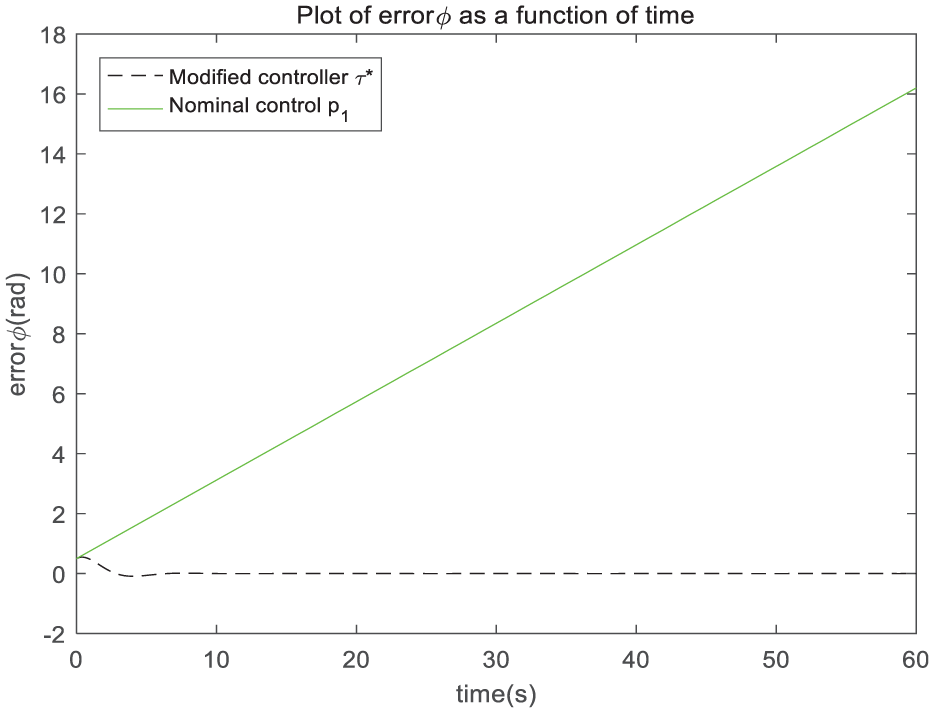
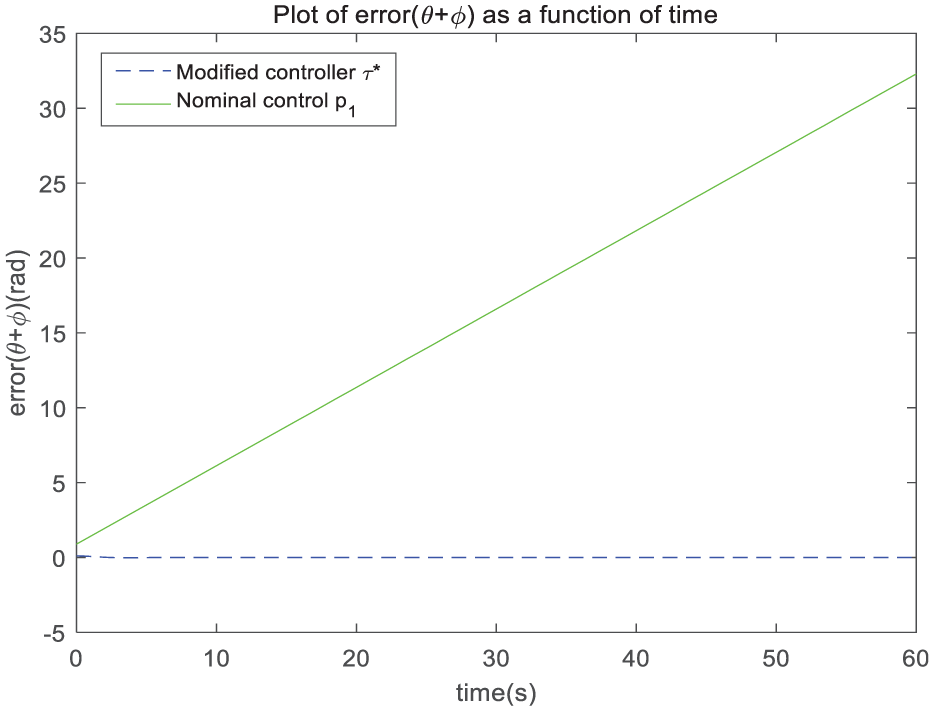
From Figures 11, 13, and 15, we can see that when initial conditions have incompatibility, the actual trajectory of the 2-DOF helicopter under the nominal control
Form Figures 11 to 17, we can also see that the trajectory tracking error which is controlled by modified controller
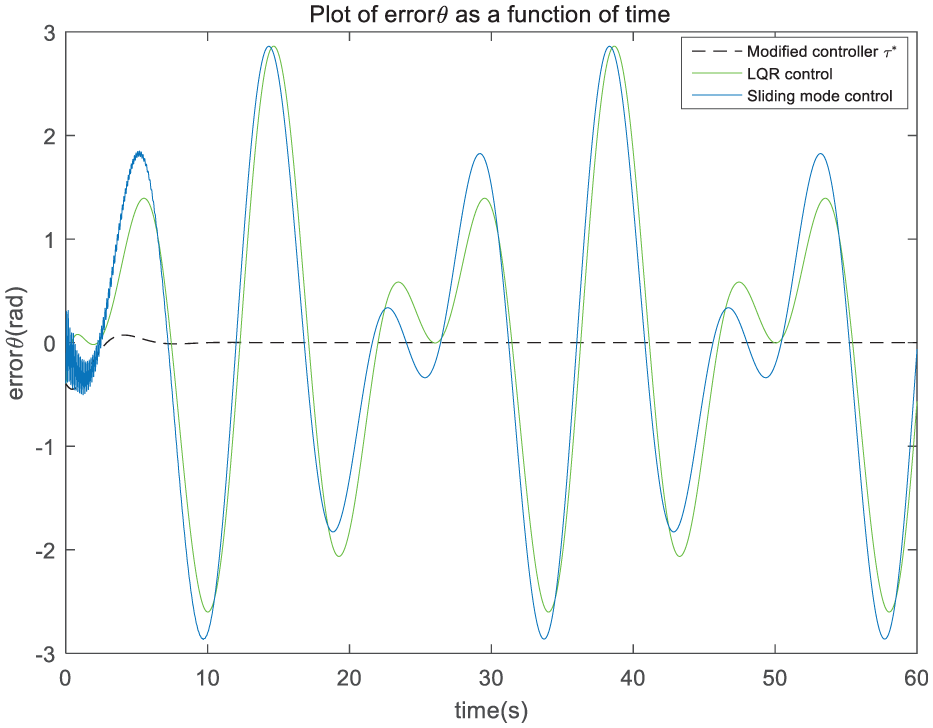
Compared with standard control methods
For further comparison, we select the standard LQR and sliding mode control methods which are usually used in the 2-DOF helicopter model to make simulation contrast. The simulation results are shown in Figures 22–32. The desired trajectory (59) is represented by red solid line and the actual trajectory is represented by other colored line.

Case 2: Comparison of the tracking performance
Case 2: Comparison of the tracking error

Case 2: Comparison of the tracking performance

Case 2: Comparison of the tracking error

Case 2: Comparison of the composite trajectory change curve of 2-DOF helicopter

Case 2: Error
Case 2: Comparison of the accumulative tracking error

Case 2: The control torque of the main rotor motor

Case 2: Comparison of the control cost

Case 2: The control torque of the tail rotor motor

Case 2: Comparison of the control cost
From Figures 22, 24, and 26, we can see that the actual trajectory of the 2DOF helicopter can perfectly follow the desired trajectory after a short period of vibration by using modified controller
The required control torques
Therefore, according to the obtained results, we can make a conclusion that the modified controller
Summary
The constraint control based on Udwadia–Kalaba equation can accomplish the trajectory tracking control task of 2-DOF helicopter’s model by theoretical analysis and numerical simulation. Compared to Lagrange method, there are no additional parameters such as Lagrange multipliers or similar variables in the Udwadia–Kalaba equation.
Udwadia–Kalaba equation solves the problem based on second-order constraints. Since the zeroth-order constraint that corresponds second-order constraint is not the only solution, the general solution can be described by mathematical calculation. Therefore, we can determine its specific general solution form by initial conditions.
When initial conditions have compatibility, we can use the nominal control
Comparing with different control methods, we find that the modified controller
The constraint control methods need to be calculated and the digital error always exist. But the error is very small and it will not have a significant impact on the control effect in practical applications.
Footnotes
Handling Editor: Xiang Yu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported through the army aviation equipment “13th Five-Year” special research project (No. 30103090201) and the Science and Technology Public Relations Project of Anhui Province (No. 1604a0902181).