
Abstract
The high accuracy tracking control of multi-axis manipulator with uncertainty is always a difficult problem for control theorists and engineers. The Udwadia–Kalaba theory effectively characterizes the explicit dynamics equations of constrained mechanical systems. The Sliding Mode Control (SMC) law is implemented under the circumstance of uncertainties in manipulator model, fluctuations in parameters, and external disturbances. However, the existing SMC law has limitations in the convergence speed and chattering. A proposed SMC law combining nonlinear sliding mode hypersurface and double-power reaching law is presented on the basis of dynamic equation provided by the Udwadia–Kalaba theory, which can address the slow convergence speed of reaching law and chattering phenomenon of SMC dynamic response. Moreover, the superiority of the proposed SMC law is verified through a comparison with two compared SMC laws: one that integrates a linear sliding mode manifold with an exponential reaching law, and another that combines the linear sliding mode manifold with the double-power reaching law. Finally, taking the SCARA robot as an illustrative example, the proposed scheme is implemented to the constraint tracking control of the multi-axis manipulator. The results show that the system has stronger robustness and faster convergence speed, which verifies the convincingness of the proposed strategy.
Keywords
Introduction
With the continuous improvement of automation and intelligence in the manufacturing industry, the high-speed and high-precision control technology of multi-axis manipulator has become a hotspot of current research. Trajectory tracking of manipulator is one of the basic goals of manipulator control, and it is also the important application in the robotic field. 1 High-precision tracking control for uncertain robots is always a difficult problem for control theorists and engineers. 2 Multi-axis manipulator is characterized by time-varying, strong coupling and non-linear dynamics. It is difficult to establish an accurate dynamic model of multi-axis manipulator since the repercussion of uncertainties such as inaccurate measurement and modeling, load variation and external disturbance, which greatly hinders the realization of stable, fast and accurate trajectory tracking control.
It is a common and important method to study the motion law of a robot system by reducing it to a constrained multi-rigid body model. The Udwadia–Kalaba theory3,4 effectively characterizes the explicit dynamics equations of constrained mechanical systems, encompassing both complete and incomplete, as well as independent and non-independent constraint relations, without relying on auxiliary variables. It further provides an explicit representation of the constraint force. Consequently, numerous researchers are committed to exploring dynamic modeling and control of robot grounded in the Udwadia–Kalaba theory.5–7
Sliding Mode Control (SMC) provides effective solutions to high-precision tracking of uncertain multi-axis manipulator in that the high robustness as to uncertainty, which is classical in robot control.8–10 However, the chattering phenomenon of SMC is energy-consuming, and evokes unmodeled high frequency dynamics with ease that induce system instability. In order to effectively reduce chattering and ensure finite time convergence, many advanced control methods with intelligent design have been studied.11–18 The SMC law is applied to the case of model uncertainty, parameter fluctuations and external disturbances in robots, which requires a reasonable selection of the reaching law (RL) and the sliding mode manifold (SMM). For the RL of the SMC law, the exponential reaching law19,20 (E-RL) exhibits a rapid convergence speed, nevertheless, the chattering phenomenon becomes increasingly severe after entering in the sliding mode stage. The power reaching law21,22 (P-RL) can decrease chattering, but its convergence velocity is sluggish, resulting in a longer duration for the system state to move away from the SMM. The double-power reaching law23,24 (DP-RL) eliminates the inherent chattering phenomenon associated with traditional SMC, and the greater the initial error, the more pronounced the advantage in terms of velocity becomes. For the SMM of the SMC law, the SMC with linear sliding mode manifold (L-SMM) does not yield convergence within a specified time and convergences slowly.2,25 Although the terminal sliding mode manifold (T-SMM) accelerates the convergence time of the system and is applied to robot control and other fields, serious chattering phenomenon still exists.26–29 The simulation result of the proposed SMC law (i.e. combining L-SMM and DP-RL) is superior to the compared SMC law (i.e. combining L-SMM with E-RL) which is compared in previous work. 30 However, the time required to attain the equilibrium point starting from the initial state and the convergence speed of the system still need for further improvement. Compared with the L-SMM and the T-SMM, the L-SMM performs better in terms of speed when the system state leaves the equilibrium point, while the T-SMM exhibits superior speed when the system state approaches the equilibrium point. Therefore, it is necessary to combine the two SMMs reasonably and give play to their respective advantages during different time periods, enabling the system to achieve better speed in the process of reaching the equilibrium point from the initial point.
In this paper, a proposed SMC law with nonlinear sliding mode manifold of hypersurface (N-SMM-H) and DP-RL is developed to track the trajectory of multi-Axis manipulator, on the basis of the dynamic equation established by the Udwadia–Kalaba theory. The remainder of this paper is organized as follows. The explicit dynamics equations of multi-axis manipulator are established by the Udwadia–Kalaba theory in Section “Dynamic modeling of multi-axis manipulator.” By comparing the common SMMs and RLs, a proposed SMC law considering parametric uncertainties and disturbances is designed in Section “SMC law with finite time convergence.” And Numerical simulation results demonstrate the superiority of the proposed SMC strategy by taking SCARA robot as an example in Section “Simulation results and analysis,” compared with two other SMC laws, namely, A: L-SMM combined with E-RL, and B: L-SMM combined with DP-RL.
Dynamic modeling of multi-axis manipulator
First considering the dynamical equation of an unconstrained multibody system is written as

where
The generalized acceleration equation pertaining to unconstrained multibody system is

Secondly, assuming that p constraints, including holonomic and/or nonholonomic constraints, are applied to the system, which can be described as

Constraint equations can be derived by differentiating equation (3) once for nonholonomic constraints or twice for holonomic constraints with respect to time t, respectively, and

where
And thirdly the actual dynamic equation for the constrained multibody system is

where
The Udwadia–Kalaba theory, proposed by Udwadia and Kalaba, 3 provided the explicit form of the constraint force as

where
Consequently, the dynamic equation of the constrained multibody system can be expressed as

The above equation establishes the dynamic model of the multi-axis manipulator.
SMC law with finite time convergence
Sliding mode manifold
Suppose that the nonlinear system is given by

where
Suppose that a switching surface function for the system state can be formulated as

The control input function of the system is

where
The N-SMM-H is adopted as

where
Therefore, it is necessary to select appropriate parameters to obtain the optimal convergence speed. The system state will stabilize and reach to the equilibrium point within a limited time for any given initial state when the system state reaches to the SMM.
Reaching law
Several approaching laws are analyzed and compared. For the DP-RL, reaching velocity of the system from the initial position to the SMM is

where the dynamic quality is guaranteed by
Consequently, the first term on the right of equation (12) plays the main role and the second term on the right of equation (12) is ignored when
Design of SMC law of multi-axis manipulator
The dynamical model based on the Udwadia–Kalaba theory can be expressed as

where
Introducing the input variables (i.e. the tracking error) as

where
The expression of
Combining the DP-RL, the control law is
where
Equation (17) is substitute into the equation (15), then

Suppose that

According to the Lyapunov function, then

In the light of the demands of accessibility conditions for control design, reasonable choice of can make
If

then

The SMC control law of manipulator based on N-SMM-H and DP-RL can be expressed as
The L-SMM is expressed as

where
And the SMC law of manipulator based on L-SMM and DP-RL is expressed as 24 :

Simulation results and analysis
The structure of multi-axis manipulator, such as SCARA robot, is illustrated in Figure 1.
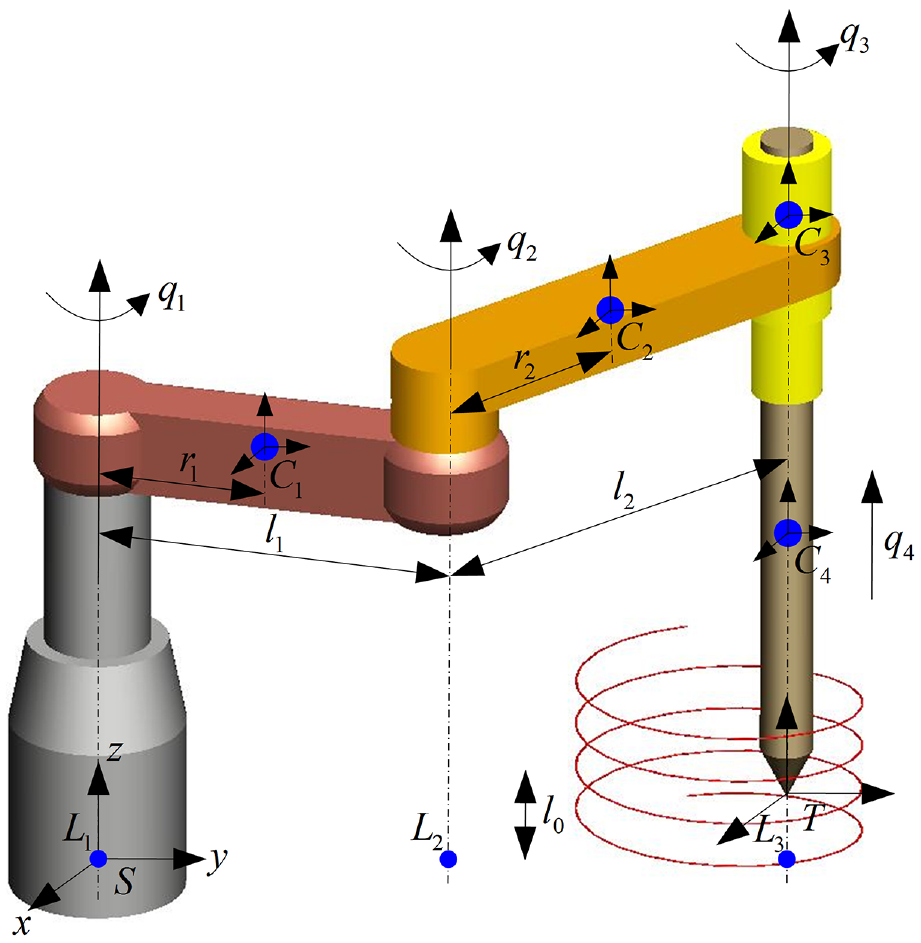
The SCARA robot subject to constraint.
The mass matrix of the SCARA robot is
where



The Coriolis matrix of the SCARA robot can be derived as
where

The gravitational force of the SCARA robot is expressed as

The motion trajectory of the SCARA robot is assumed to be described as
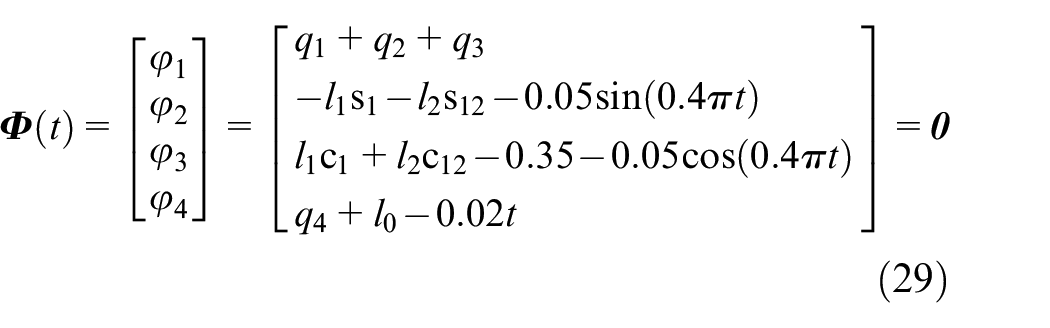
Constraint equations can be derived by differentiating equation (29) twice with respect to time t, respectively, and
Physical parameters of the illustrative system are given as
(1) The control parameters of the SMC law combined with the L-SMM and the E-RL are
(2) The control parameters of the SMC law combined with the L-SMM and the DP-RL are
(3) The control parameters of the SMC law combined with the N-SMM-H and the DP-RL are
Numerical simulations based on different methods are presented in Figures 2 to 6 to demonstrate the superiority of the proposed SMC law, where subscript A and −A represent the SMC law combining the L-SMM with the E-RL; subscript B and −B represent the SMC law combining the L-SMM with the DP-RL; subscript C and −C represent the SMC law combining the N-SMM-H with the DP-RL.
(1) The constraint tracking results of SCARA robot is demonstrated as in Figure 2. Evidently, the proposed SMC law can track the given trajectory more quickly.
(2) The position tracking and the tracking errors measurement of each joint are provided in Figure 3, and the dashed line is the given position (i.e. q di ). The position response obtained by the proposed SMC law (i.e. q i C) tends to the theoretical value obviously than that obtained by the compared SMC laws (i.e. q i A and q i B). For the compared SMC law-A (i.e. e i A), the compared SMC law-B (i.e. e i B) and the proposed SMC law-C (i.e. e i C), the tracking errors of each joint tend to 0 at about 4 s, 1.3 s and 0.9 s, respectively. The time required to approach to the equilibrium point from the initial state for the system is obviously less than that when the two traditional SMMs and the RLs are used respectively, and the convergence speed of the system is improved when the new SMM and the RL are used.
(3) In contrast to the chattering of the torques obtained by the compared SMC laws, the proposed SMC law results in smaller chattering of the input control torque and compensation torque, and the robustness of the system is improved while maintaining the tracking velocity, which can be referred in Figures 4 to 6.
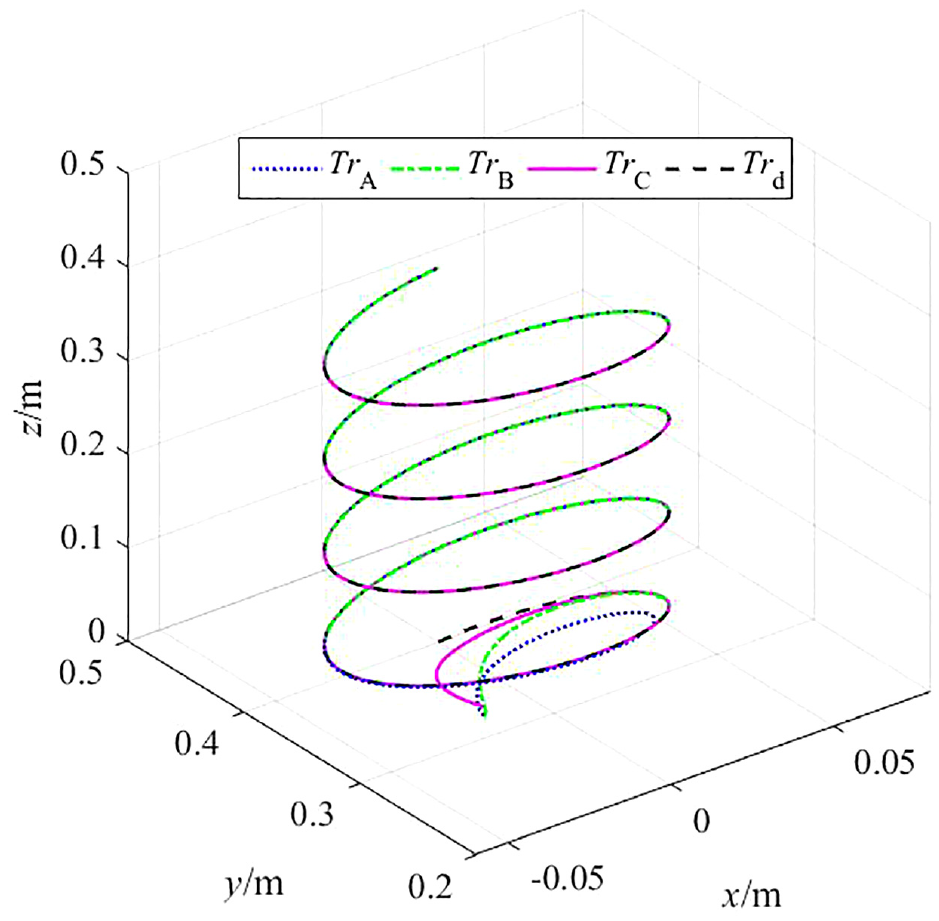
Constraint tracking control.
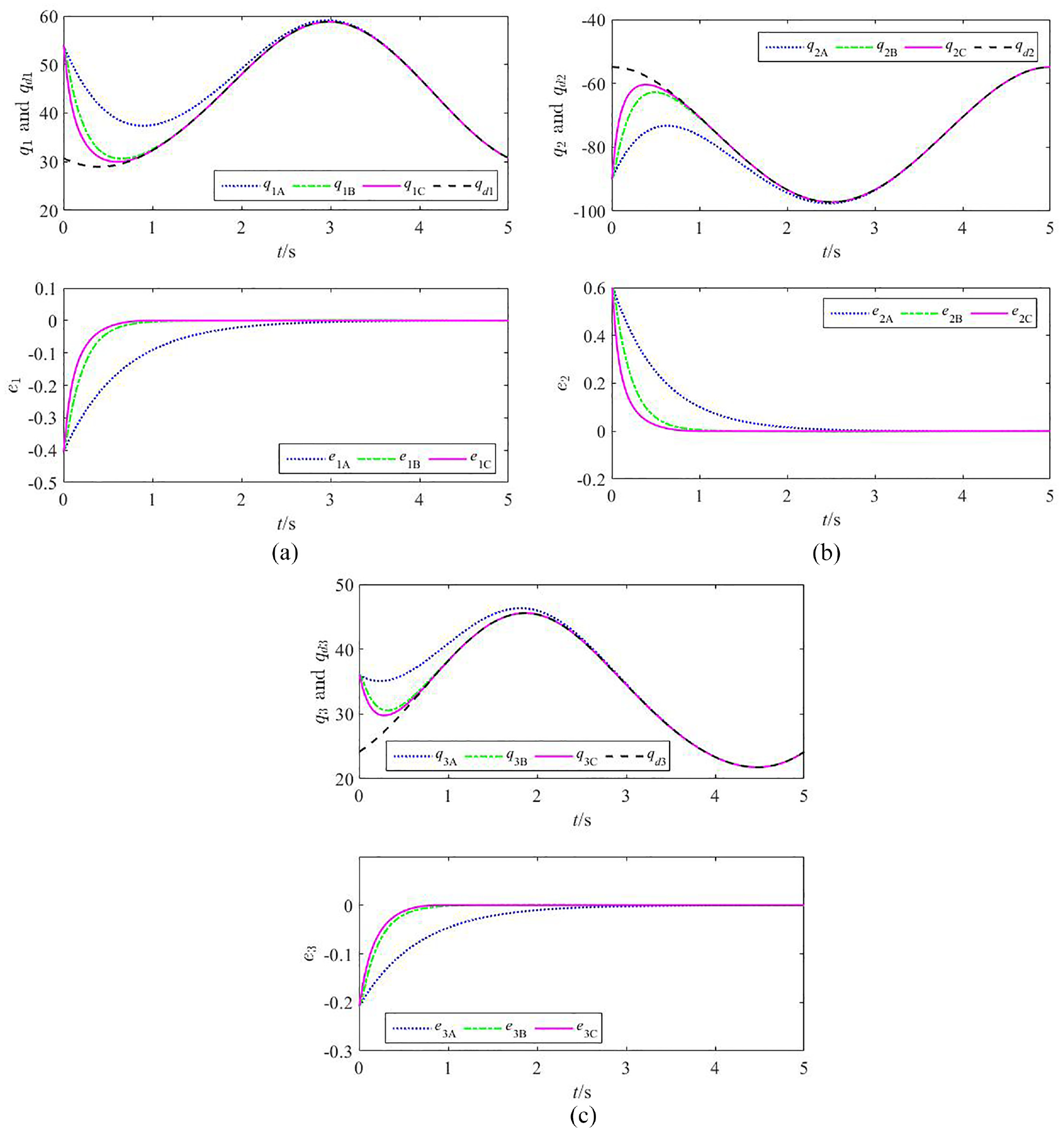
Position tracking and error of each joint: (a) q1 and e1, (b) q2 and e2, and (c) q3 and e3.
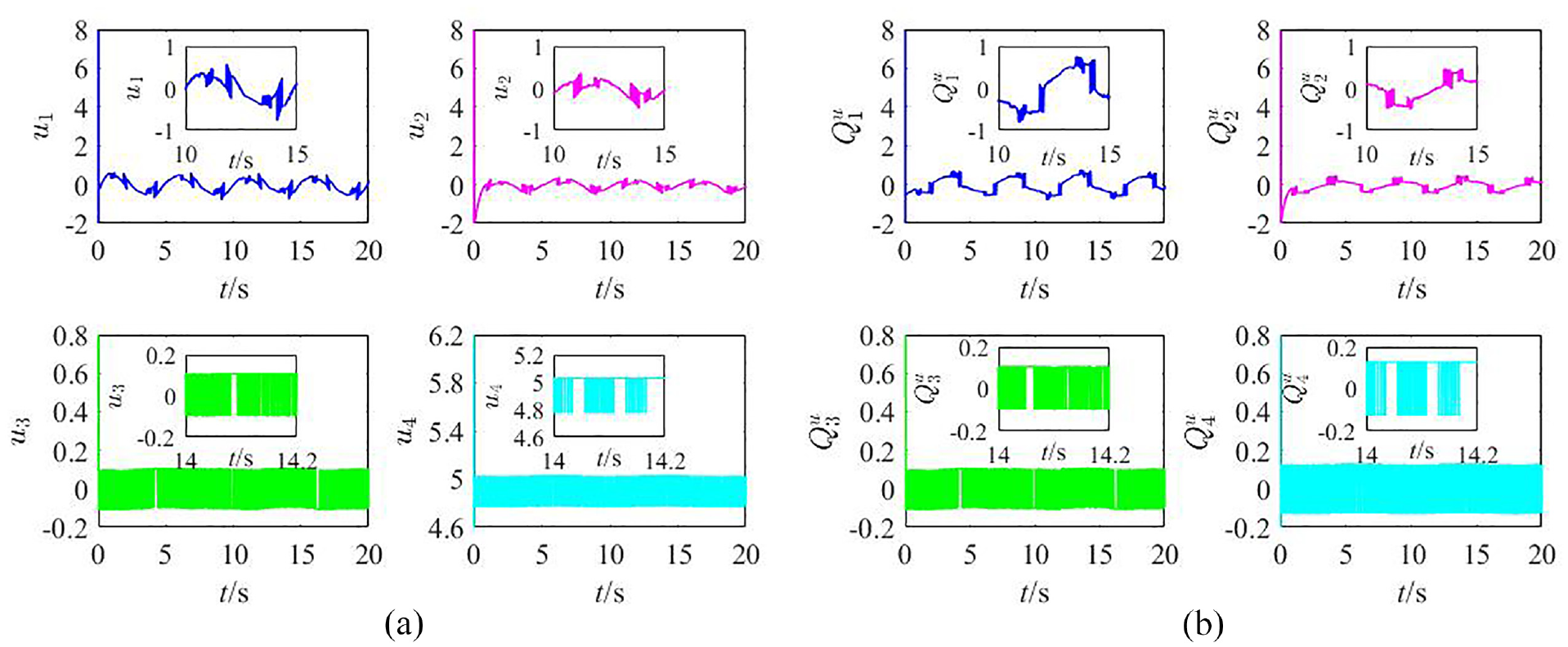
The input control torque and compensation torque obtained by the compared SMC law-A: (a) the input control torque and (b) compensation torque.
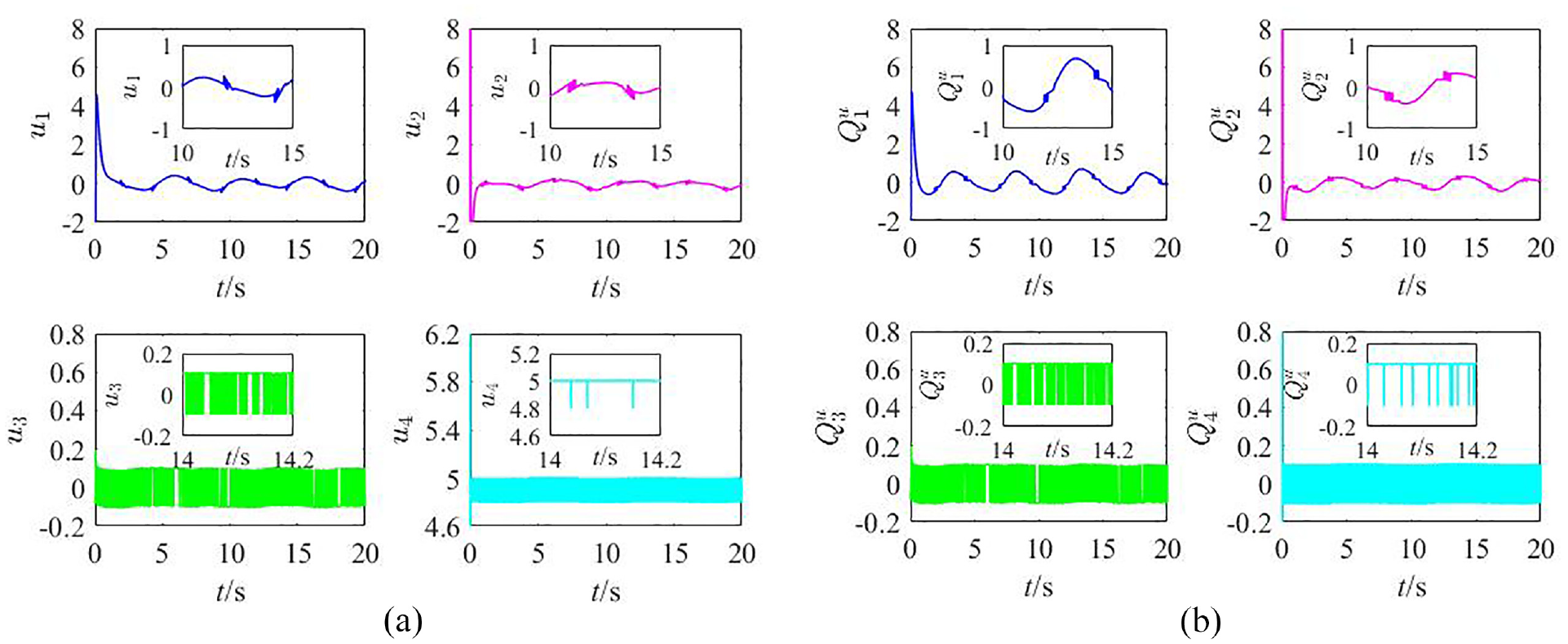
The input control torque and compensation torque obtained by the compared SMC law-B: (a) the input control torque and (b) compensation torque.
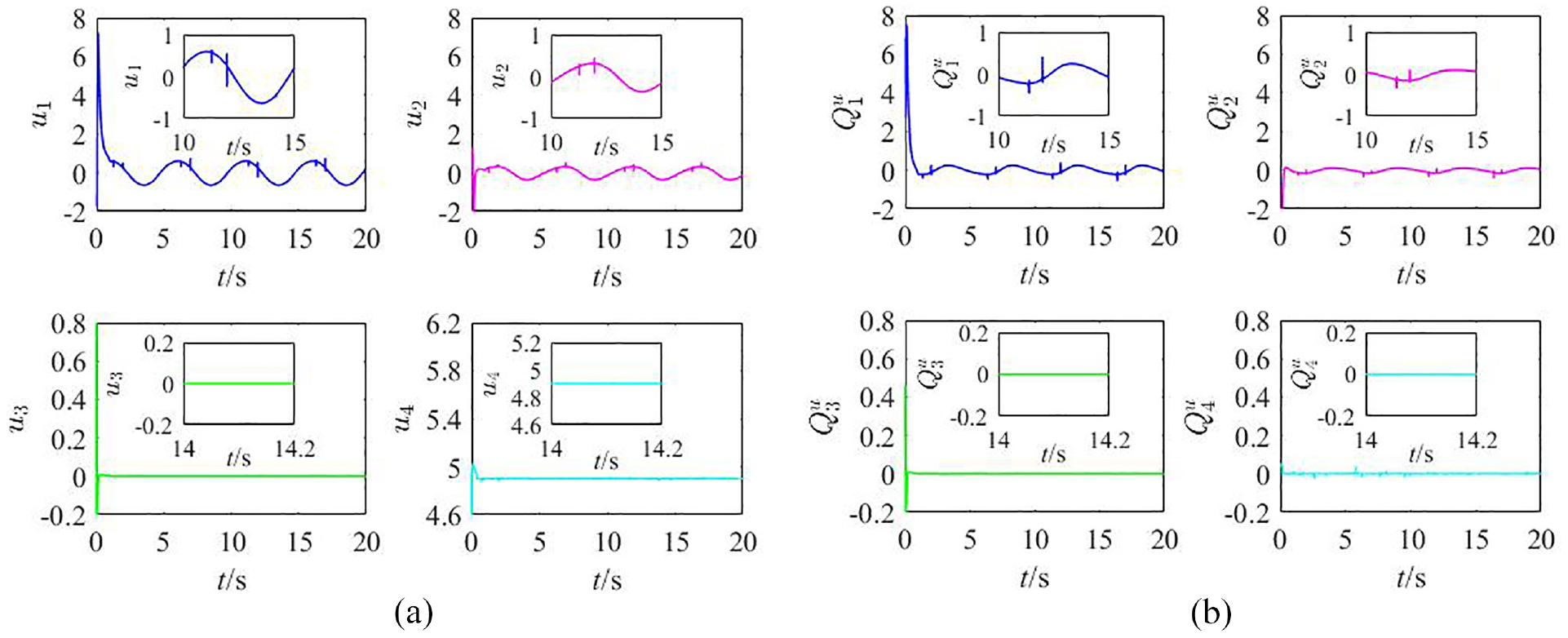
The input control torque and compensation torque obtained by the compared SMC law-C: (a) the input control torque and (b) compensation torque.
Conclusions
(1) The proposed SMC law combining the N-SMM-H with the DP-RL is formulated on the basis of dynamic equation provided by the Udwadia–Kalaba theory, which reduces the chattering inherent in the system greatly, and further improves the motion quality of the multi-Axis Manipulator system.
(2) For the N-SMM-H, the equilibrium point can be reached in a limited time, and the velocity is obviously faster than that of linear sliding mode, which can increase convergence speed for the system in the sliding stage.
(3) The DP-RL is used to make the system reach the SMM faster than the E-RL, which improves the convergence speed of the system during the reaching stage.
(4) The current results still need further improvement. According to the initial conditions and external disturbances of the robot system, the parameters of the DP-RL and N-SMM-H in the proposed method can be adjusted to obtain better results.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Beijing Municipal Science and Technology Project (No. KM202111417006), the Academic Research Projects of Beijing Union University (Nos. ZK10202305 and ZK80202005), and the Beijing Municipal Science and Technology Project (No. KM202111417005)
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.