
Abstract
With the aim of dynamic modeling of the SCARA robot subjected to space trajectory constraint to satisfy repetitive tasks with higher accuracy, a succinct and explicit equation of motion based on Udwadia–Kalaba theory is established. The trajectory constraint, which is regarded as the external constraints imposed on the system, is integrated into the dynamic modeling of the system dexterously. The explicit expression of constraint torques required to satisfy constraints and explicit dynamic equation of the system without Lagrange multiplier are obtained. However, constraint violation arises when the initial conditions are incompatible with the constraint equations. Baumgarte stabilization method is considered for constraint violation suppression. Simulations of the varying law of the generalized coordinate variables and the trajectories of the SCARA robot are performed to demonstrate the simplicity and accuracy of the method.
Introduction
As a nonlinear dynamic system, the SCARA robot with four joints (e.g. three revolute and one prismatic) has better repeatability of robot movements and higher accuracy in their performance. The SCARA robot is required to follow the desired trajectory for many applications during the current stage of industrial development for productivity enhancement and quality improvement in manufactured products, such as pick and place, assembly, and packaging.
In fact, dynamic modeling of the SCARA robot to realize the desired trajectory is within the dynamic modeling of constrained multibody system. One of the key issues to address in multibody dynamics is to obtain explicit equations of motion for constrained dynamical systems. 1 Constrained dynamical systems are conventional model based on Lagrangian formulation in which Lagrangian multiplier is determined relied on problem-specific approaches. 2 When the number of the constraint equations is not equal to the number of generalized variables, the traditional Lagrangian formulation is invalidated. Moreover, there are many alternative approaches available to model constrained dynamical systems, which also need auxiliary variables. For example, Hamel’s equations require Quasi Velocity as auxiliary term; Kane’s 3 equations require a set of Pseudo-Generalized Speed as auxiliary terms; Gibbs–Appell formulation requires Pseudo-Velocity and Pseudo-Acceleration as auxiliary terms; 4 and Poincaré equations require a set of Pseudo-Velocity as auxiliary terms. It is worth noting that only the numerical solutions can be obtained by all of the aforementioned methods.
An explicit equation of motion for constrained systems, called the Udwadia–Kalaba equation, was proposed by Firdaus E. Udwadia and Robert E. Kalaba 5 in 1992, which opens up a new way of modeling complex multibody systems. This method provides a general structure for the explicit equations of motion for mechanical systems subjected to holonomic and nonholonomic equality constraints.6,7 Moreover, it is not an issue for Udwadia–Kalaba equation based on the Gauss’ principle of least constraint, and the optimal value of the generalized variables solution can still be obtained by the Moore–Penrose generalized inverse when the number of the constraint equations is not equal to the number of generalized variables. Udwadia and colleagues8–11 also effectively dealt with the dynamics and control of nonlinear uncertain systems to benefit the basic research and further application of this method. It has been studied in some application fields, such as industrial robot, 12 parallel robot, 13 flexible multibody systems, 14 railway vehicles collision, 15 machine fish, 1 control of tethered satellites, 16 rigid multibody systems, 17 and mobile robots. 18
Like many other robots, the SCARA robot is often required to achieve some specified space trajectories (i.e. trajectory constraint). Only a few scholars focus on the explicit dynamical equations for the SCARA robot subjected to constraints. In this article, a succinct and explicit equation of motion based on the Udwadia–Kalaba theory for the SCARA robot is established. However, constraint violation arises when the initial conditions are incompatible with the constraint equations. Due to the simplicity and easiness for computational implementation, Baumgarte stabilization method, proposed by Baumgarte 19 and then developed in numerous contributions, is probably the most popular and attractive technique to implement the control of constraint violation. 20 Therefore, Baumgarte stabilization method is considered for constraint violation suppression. The comparison of simulation results of the dynamic modeling shows that the derived equations can successfully address the dynamic modeling for the SCARA robot subjected to trajectory constraints to satisfy repetitive tasks with higher accuracy. Finally, conclusions of this work and future tasks are given.
Udwadia–Kalaba theory
The explicit equation of motion for a constrained dynamical system proposed by Udwadia and Kalaba 5 is derived in this section using a systematic general three-step procedure: (1) consideration of the so-called unconstrained system of equations obtained using Newtonian or Lagrangian mechanics, (2) description of the constraints required to model the given constrained system, and (3) expression of the constraint torques for system to satisfy the given constraints.
Unconstrained multibody dynamics
Considering an unconstrained multibody system characterized by n generalized coordinates

in which
The generalized acceleration of the unconstrained dynamical system, defined as

Constraint description
It is assumed that the system is subjected to p sufficiently smooth control requirements as constraints, which include all the usual varieties of holonomic and/or nonholonomic constraints and can be describes as 9

Equation (3) can be simplified as

Differentiating the usual constraint equation (4) with respect to time t once (for nonholonomic constraints) or twice (for holonomic constraints) yields a set of constraint equations in matrix form as 9

in which
Constrained multibody dynamics
The intent needs to establish the explicit equations of motion with constraints. Additional generalized forces of constraints arise due to the presence of constraints. Accordingly, the actual explicit equation of motion of the constrained system can be assumed to take the form

in which
Obtaining the constraint torques is a main goal in the modeling of constrained dynamical system. Udwadia and Kalaba 7 proposed that the constraint torque vector is explicitly given by

in which
The explicit dynamical equation of the constrained system called as the Udwadia–Kalaba theory is denoted in the following general form5,9

Premultiplying both sides of equation (8) with

The standard Lagrange multiplier formulation of the constrained dynamics is in the following form

in which Lagrange multiplier
Dynamic modeling of SCARA robot
Consider the SCARA robot illustrated in Figure 1. The generalized coordinates of the system are denoted as

Sketch map of the SCARA robot manipulator subject to constraint.
Unconstrained dynamics
Result
The equations of motion of the unconstrained dynamical system are established first using the traditional Lagrange method

in which



Proof
The coordinate frame relative to the base frame of the robot is represented as

in which
The body velocity of the mass center of the ith link is described as

in which

in which
The total kinetic energy of the robot has the form

in which
The total potential energy has the form

in which
The Lagrange function can be obtained as

So far, the equations of motion can be obtained by substituting into Lagrange’s equations

in which


1. The matrix
In terms of the link Jacobians,

in which

The inertia of the ith link reflected into the base frame of the manipulator,

Using the notation defined above, the inertia matrix for the manipulator can be obtained as 21

2. Substituting equations (22) and (23) into equation (21) and expanding

Rearranging all the terms, equation (28) can be rewritten as

in which
The matrix

in which
3. Finally, the gravitational forces on the manipulator are written as 21

For the SCARA robot, considering

For the three revolute joints, the direction of rotation is described as
The inertia matrix

in which
The Coriolis matrix for the SCARA robot can be obtained as 21

The gravitational forces on the SCARA robot is expressed as 21

Constraint description
The exponential of this twist is given by

in which

The forward kinematic map of the SCARA robot is given by

in which the individual exponentials have the form

Expanding the terms in the product of exponentials formula yields

The end-effector of the SCARA robot moves along space trajectory to complete the given tasks. The desired space trajectory, which is regarded as constraints, is presented as follows.
The position constraints can be described as

The following elementary rotations about the x-, y-, and z-axis are defined as

ZYZ Euler angles are used to express the orientation of the end-effector of the SCARA robot. The equivalent rotation matrix is denoted as

Conversely, equivalent ZYZ Euler angles can be solved by the rotation matrix, as shown below. If

and

The solution of

The orientation constraint equation combined with equation (43) can be derived as

Now that there are the following four constraints in total

In general, the constraint equations may be thought of as a set of p (p = 4) constraints of the form

Differentiating equation (48) with respect to time t twice yields the second-order constraints

in which

Constraint torque description
Constraint torques for the system to meet the desired trajectory are explicitly determined by equation (7) in the form of

Finally, the dynamic equation is obtained by equations (6), (7), and (50)

Numerical simulations
The constraints must be satisfied at each instant of time during the maneuver including the initial time. In practice, however, it is usually quite difficult to meet these constraints at the initial time.
22
In other words, the initial conditions are incompatible with the constraint equations. It is assumed that the initial configuration for simulation are as follows:

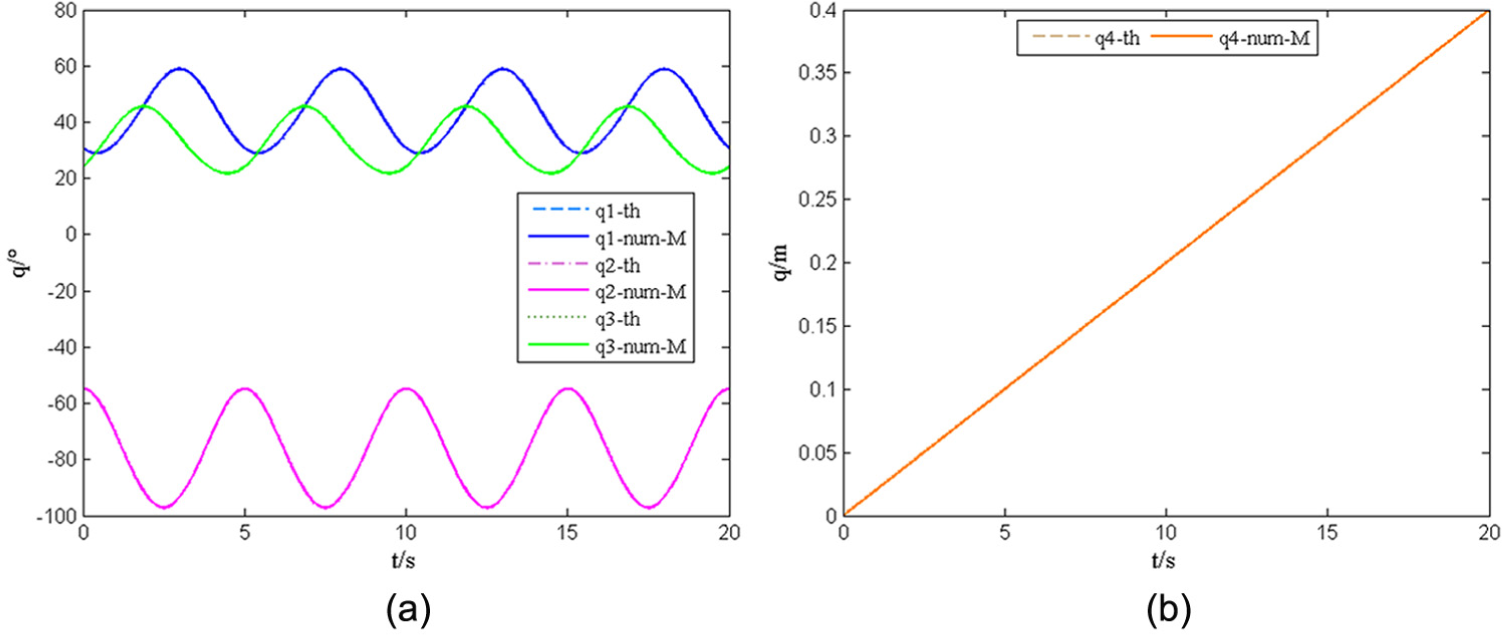
Comparisons of dynamic responses between numerical value and theoretical value: (a) q1, q2, q3 and (b) q4.
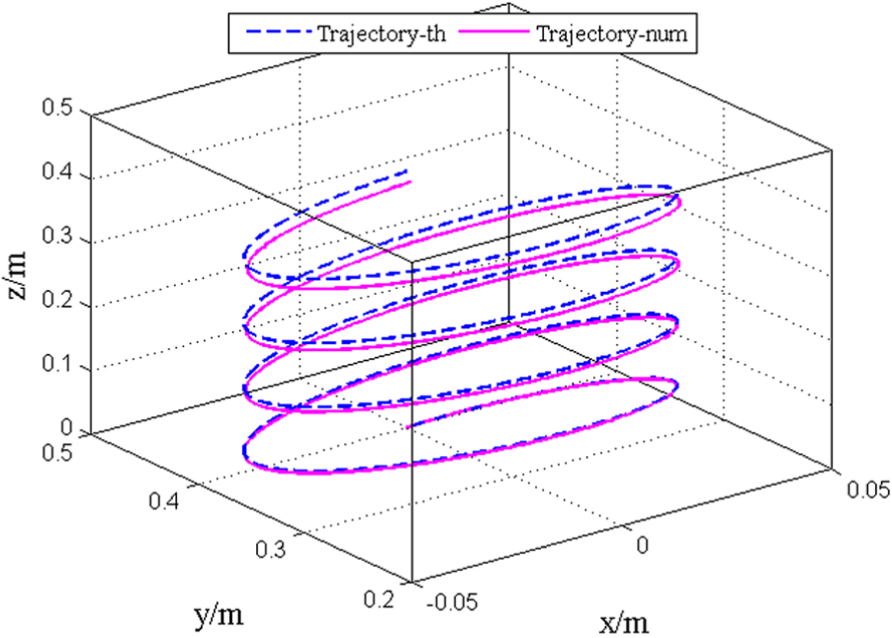
Comparison of the trajectories between numerical value and theoretical value.

Sketch map of joint errors between numerical value and theoretical value: (a)
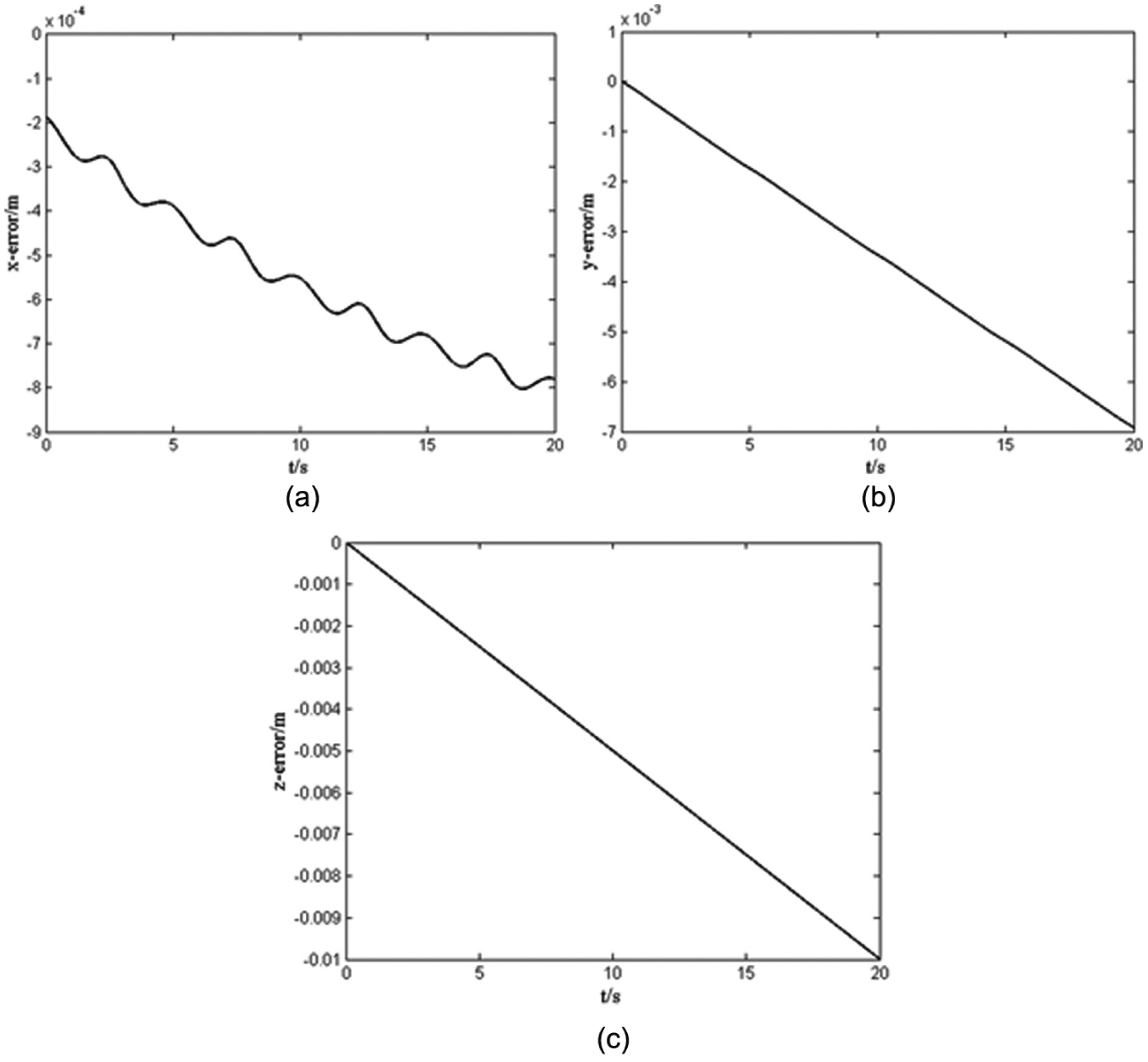
Displacement errors between numerical value and theoretical value: (a) x-error, (b) y-error, and (c) z-error.
Figure 2 represents the dynamic responses at each joint of the SCARA robot subjected to the space trajectory constraints, in which the solid curves and the dash curves represent the numerical value and the theoretical value, respectively. The numerical trajectories is slightly off the theoretical trajectory with time, as illustrated in Figure 3, in which the solid curve and the dash curve represent the numerical trajectory and the theoretical trajectory, respectively. However, the joint errors and displacement errors in the satisfaction of the constraints tend to increase in time and spoil reliability of the simulation results, as shown in Figures 4 and 5, respectively. The largest displacement errors correspond to about 8 × 10−4 m in x-axis, 7 × 10−3 m in y-axis, and 0.01 m in z-axis, which should not be neglected. Therefore, it is necessary to consider the numerical method for reducing the errors.
Error reducing
Constraint violation arises when the initial conditions are incompatible with the constraint equations. This makes the simulation results seriously different from real situations. Accordingly, it is necessary for the use of Baumgarte stabilization method to suppress constraint violation. In the standard formulation of the method, the (open-loop) second-order differential constraints,

in which
If

Then, equation (52) yields the following constraint equation

Note that an improper choice of
Figure 6 represents the dynamic response curves as a function of time t between modified numerical value and theoretical value, in which the solid curves and the dash curves represent the modified numerical value and the theoretical value, respectively.
The trajectories are almost coincident by comparing between modified numerical value and theoretical value, as illustrated in Figure 7, in which the solid curves and the dash curves represent the modified numerical value and the theoretical value, respectively. The overall effect of constraint trajectory obtained by modified numerical integration gets clear improvement.
Comparing with the qi-error between numerical value and theoretical value, the amplitude of qi-error between modified numerical value and theoretical value is substantially lowered, as illustrated in Figure 8. Obviously, the errors are within an acceptable range that the constraint relations in x-, y-, and z-axis are being maintained well as desired, as depicted in Figure 9.
Figure 10 represents the constraint torques to make the SCARA robot follow the space trajectory for precise application.
Comparisons of dynamic responses between modified numerical value and theoretical value: (a) q1, q2, q3 and (b) q4.
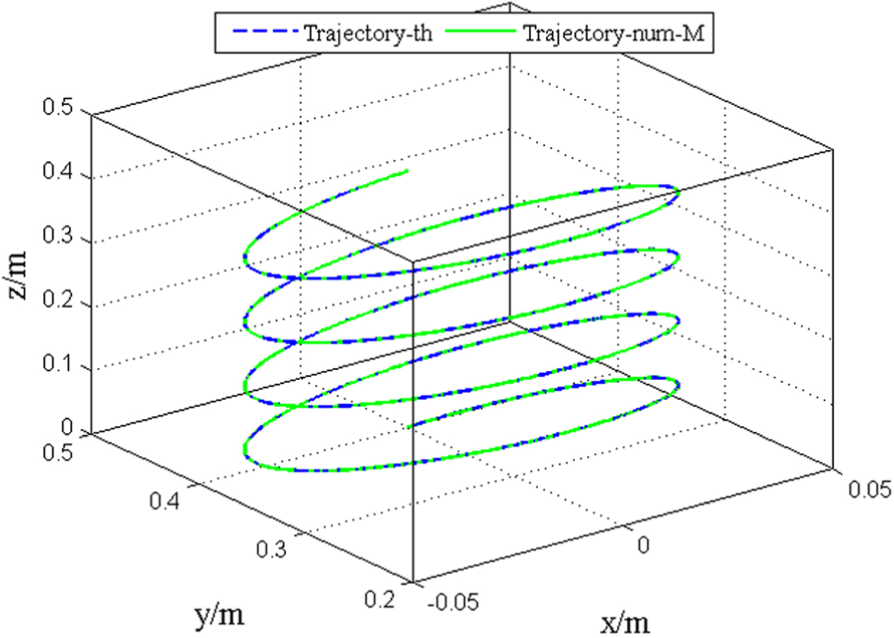
Comparison of the trajectories between modified numerical value and theoretical value.

Comparisons of joint errors for-and-aft modification: (a)

Comparison of displacement errors between for-and-aft modification: (a) x-error, (b) y-error, and (c) z-error.
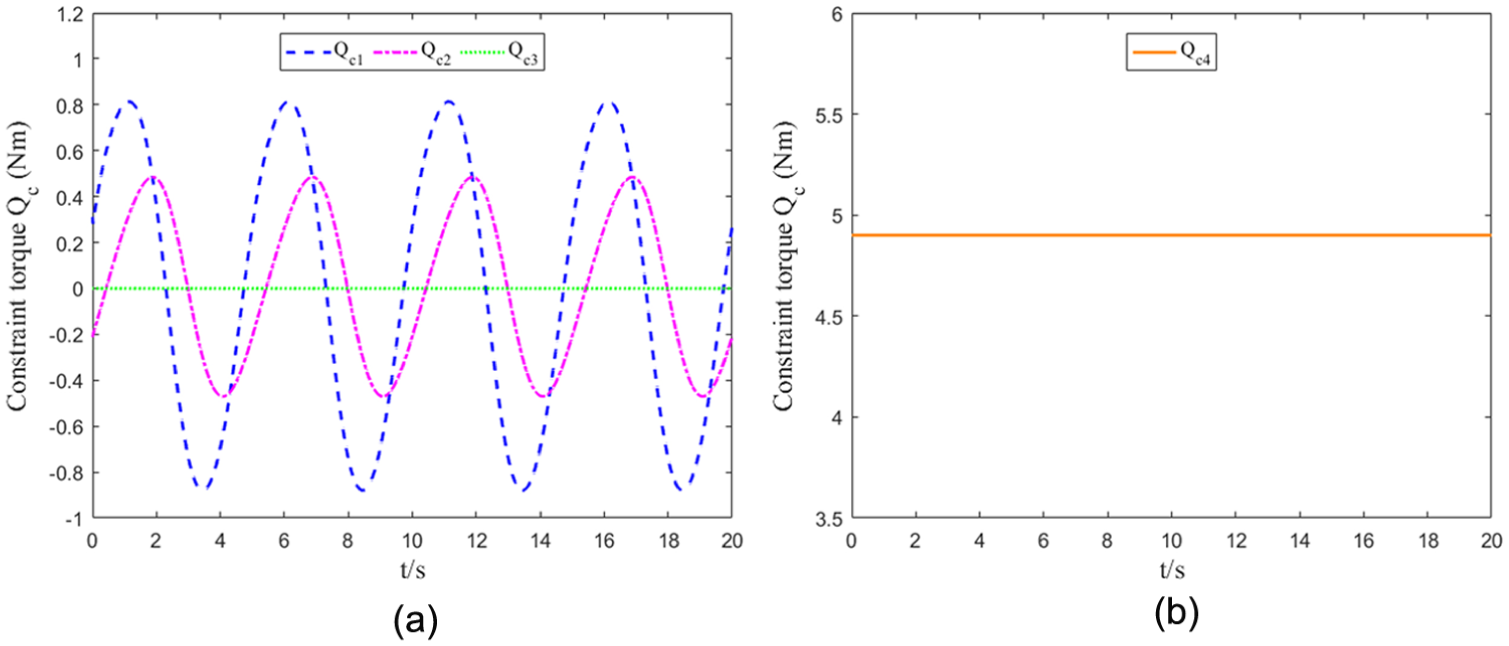
Constraint torques: (a) Qc1, Qc2, Qc3, and (b) Qc4.
Conclusion
Aiming at dynamic modeling of the SCARA robot subjected to constraint, this article establishes the dynamic equation based on the Udwadia–Kalaba theory and reduces the errors using Baumgarte stabilization method. The comparison of numerical simulations confirms the ease of implementation and the high numerical accuracy of this methodology. The research process reveals some conclusions as follows:
The desired space trajectory, which is regarded as constraints imposed on the system, is integrated into the dynamic modeling of the system dexterously.
The explicit, closed-form expression for the constraint torques required to guarantee the end-effector of the SCARA robot to move along the desired space trajectory and the explicit dynamic equation of the system without Lagrange multiplier are obtained.
Baumgarte stabilization method is used for constraint violation suppression to realize trajectory motion with high accuracy.
Footnotes
Academic Editor: Kai Bao
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.