
Abstract
We present an adaptive hierarchical sliding mode control based on fuzzy neural network for a class of underactuated systems to solve the problem of high-precision trajectory tracking. This system is viewed as several subsystems. One subsystem is used to design the first-layer sliding surface, which constructs the second-layer sliding surface with another subsystem. When the top layer includes all the subsystems, the design process is finished. Meanwhile, the equivalent control law and the switching control law are achieved at every layer. Because the hierarchical sliding mode control law relies excessively on the requirement of detailed information of the underactuated dynamic system, and because that method causes an inevitable chattering phenomenon, an online fuzzy neural network system is applied to mimic the hierarchical sliding mode control law. Moreover, the bounds of system uncertainties and modeling error caused by the fuzzy neural network system are estimated online by a robust term. The stability of the closed-loop system is guaranteed based on the Lyapunov theory and Barbalat’s Lemma. Finally, the examples, a single-pendulum-type overhead crane system and an inverted pendulum system, are simulated to verify the effectiveness and robustness of the proposed method compared with some conventional methods.
Keywords
Introduction
An underactuated system is a class of mechanical systems with fewer independent control actuators than degrees of freedom (DOFs). 1 Based on the input number and the output number, underactuated mechanical systems can generally be divided into single input multiple output (SIMO) and multiple input multiple output (MIMO) systems. This study focuses on SIMO systems, the dynamical models of which are easier to analyze and verify experimentally. However, they show strong nonlinear, dynamic constraints and coupling properties. There has been much research on SIMO underactuated systems.2–5 In Adhikary and Mahanta, 2 an integral backstepping sliding mode control method was proposed for the cart–pendulum system with matched and mismatched uncertainties. Karkoub and Zribi 3 presented a robust control scheme for an overhead crane and utilized a μ-synthesis controller to compensate for unmodeled dynamics. To solve the stability and tracking problems for an underactuated system, Suykens et al. 4 proposed an optimal control that successfully used least squares support vector machines (SVMs). Hung et al. 5 designed a self-tuning fuzzy sliding mode controller for a rotational actuator system. In brief, the controller designs and stability analyses of SIMO underactuated dynamic systems have been an important research area.
It is commonly known that sliding mode control (SMC), a type of variable structure control, can effectively control uncertain nonlinear systems with matched uncertainties and disturbances owing to it being invariant to uncertainties and insensitive to changes of the system parameters. 6 That method has been successfully applied in many fields and achieved good robust performance.7–9 Some studies, published in the last few years, attempt to use SMC to control underactuated systems.10–13 The design process, using the SMC, is complex due to strong coupling and the reduced dimensionality of the input space. Therefore, hierarchical sliding mode control (HSMC) was proposed instead.14–17 Qian and colleagues14,15 proposed an HSMC structure for an underactuated system: the system was divided into several subsystems, and then the higher sliding surface was constructed by the lower sliding surface together with a sliding surface of one subsystem in the lower layer. Finally, all the control laws in different layers were connected to get the final control rate. As a result, this method reduced the high-dimensional system into low-dimensional subsystems. Therefore, the HSMC method can effectively reduce the complexity of the controller design for underactuated systems. A substantial number of studies both on simulation analysis results and in verification experimental results have been presented to solve the following issues. (1) Unmodeled dynamics and uncertainties: In Hwang and Wu, 16 an adaptive HSMC method was designed to control an underactuated mobile robot with frictions and uncertainties. The frictions and uncertainties were compensated for by a robust term that required knowing the bound of frictions and uncertainties. To adaptively compensate for uncertainties, Hwang et al. 18 designed a hierarchical improved fuzzy dynamic sliding mode control method, where two fuzzy logic systems were utilized to approximate system uncertainties. (2) Optimization of control parameters: Qian and Yi 17 used a fuzzy logic system to learn the control gain and verified its effectiveness through simulation. A hierarchical fuzzy sliding mode (HFSM) method was proposed by Lin and Mon, 19 where several fuzzy logic systems were self-tuning based on Lyapunov theory to learn the optimal coupling factors designed at every layer. (3) Chattering and unknown continuous nonlinear functions: To solve these problems, an adaptive fuzzy hierarchical sliding mode control method was proposed for a class of SIMO uncertain underactuated nonlinear systems in Hwang et al., 20 where several fuzzy systems approximated the unknown dynamic nonlinear functions and even estimated uncertainties and disturbances. The common feature of these previous results is focused on how to use a fuzzy system to solve the regulation control problem of underactuated systems. There are some disadvantages: the chattering phenomenon cannot be avoided, and the controller design process relies excessively on complete and accurate kinetic models. Although the chattering and the unknown dynamic model are taken into account in Hwang et al., 20 this method made the designing process and controller structure complex and computationally expensive.
Three methods are usually employed to deal with uncertain nonlinear dynamic functions or unmatched disturbances. These include neural network, fuzzy logic system, and SVMs. A neural network system can approximate any continuous function and possess the merit of low-level learning, so it is used in different areas.21,22 However, it has some problems such as overfitting, local minimum, and slow learning speed. A fuzzy logic system can easily use linguistic information to express human experience and logical reasoning.20,23,24 At the same time, it suffers from complexity and slow learning. SVMs are effective to pattern recognition, with good learning performance even under the condition of small training samples. 25 Several studies on the control of nonlinear systems have used SVMs for online learning of dynamic uncertainties or dynamic inverse models.25–28 However, it is not easy to analyze and guarantee the stability of the closed-loop system. In order to overcome the respective disadvantages of the above methods, while also leveraging the respective advantages of neural networks and fuzzy logic systems, an increasing number of studies have used fuzzy neural networks (FNNs) which incorporated a neural network into the fuzzy logic system.7,29–32 In Lin et al., 31 several FNN systems were utilized to learn the unknown dynamic nonlinear function for a class of single input and single output (SISO) uncertain nonlinear systems, but only the adaptive self-tuning weights of FNN were given in the output layer. Therefore, if the mean and standard deviation of the Gaussian membership functions cannot be accurately estimated by the system designers, tracking the system performance is not guaranteed. Wai and Muthusamy 7 proposed an intelligent FNN controller for an n-link robot manipulator considering actuator dynamics, where the FNN was designed to learn the conventional SMC law. The parameters of the FNN, including the weights of the output layer and mean and standard deviation of the Gaussian functions in the membership layer, were adapted based on Lyapunov stability theorem. A fuzzy-neural-network-inherited backstepping control was designed for a robot manipulator in Wai and Muthusamy, 32 where the FNN was used to approximate the conventional backstepping control law. However, the previous methods ignore the uncertainties and the inevitable error produced in the learning process of an FNN.
Motivated by the above problems, an adaptive hierarchical sliding mode control based on fuzzy neural network (AFNNHSMC) is designed in this article for a class of SIMO underactuated nonlinear systems with system uncertainties and time-varying external disturbances. The main contributions of the proposed control method are as follows: (1) The FNN system with appropriate self-tuning laws and projection algorithms is applied to learn the control law of HSMC. Compared with Hwang and colleagues,18,20 this system decreases the number of the required control parameters and reduces the difficulty of controller design process and stability analysis. (2) A self-tuning compensator is designed by considering not only the system uncertainties and time-varying external disturbances, but also the modeling error caused by the FNN.
This article is organized as follows. Following the introduction, section “System description and problem formulation” describes a class of SIMO underactuated nonlinear systems and presents the problems that exist in these systems. In section “HSMC,” a conventional HSMC is designed for a class of SIMO underactuated systems with system uncertainties and time-varying external disturbances. Then, in section “AFNN HSMC,” an AFNNHSMC method and the corresponding learning algorithm are designed based on the Lyapunov theory and Barbalat’s Lemma. The numerical simulations and discussions are provided to demonstrate the effectiveness of the proposed control method in section “Simulations and discussion.” Finally, concluding remarks are presented in section “Conclusion.”
System description and problem formulation
System description
A class of SIMO underactuated nonlinear systems with time-varying uncertainties can be expressed as follows

where

where
Assumption 1
Since the uncertainties

Problem formulation
In this article, the aim is to design a suitable control law u to the above SIMO underactuated system shown in equation (1), such that the system will move from an initial position to the desired position. An adaptive hierarchical sliding mode control (AHSMC) method based on FNN is applied to design this suitable control law. At the same time, some self-tuning laws are obtained to adjust the parameters of the FNN system used for learning the HSMC law. A series of matched disturbances and the modeling error caused by the FNN system will be compensated for by a robust term. Finally, the validity and robustness of the proposed controller will be illustrated by the following aspects: (1) simulate the single-pendulum-type overhead crane system and the inverted pendulum system; (2) set different initial state values; (3) address some parameter change and external disturbances; (4) compare with the conventional HSMC method; and (5) compare with the HFSM decoupling controller.
HSMC
The designing process of HSMC, shown in Figure 1, is introduced as follows. First, two states

Structure of the hierarchical sliding mode control system.

Control framework of the SIMO system using the HSMC method.
In order to ensure a simple stability analysis process and easily design the control parameter, the traditional sliding surface of the ith subsystem can be defined as

where
The derivative of

The equivalent control

The ith-layer sliding surface

where

where

Meanwhile, it is assumed that the control law of the ith-layer subsystem can be defined as

where
The Lyapunov function candidate

Based on the stability theory of Lyapunov, it is assumed that
where
When


The derivative of

Based on the Lyapunov stability theory, 33 the sliding surface is asymptotically stable. However, while the HSMC is based on the accurate dynamical model, it is challenging to obtain the bounds on uncertainties, making it impossible to obtain the actual dynamical model in practical applications. Therefore, it is challenging to implement the HSMC in practical systems and the stability of the system cannot be ensured. An AFNNHSMC is designed to guarantee the stability of the practical system, and the process is introduced in the next section.
AFNNHSMC
An adaptive four-layer FNN system is constructed to approximate the control law of HSMC. The FNN system contains an input layer, a membership layer, a rule layer, and an output layer, as shown in Figure 3. The input layer and the output layer denote the sliding surface vector of HSMC and the control law, respectively. The model description of the FNN system is introduced layer by layer as follows:34,35
Layer 1—the input layer: The input signals
Layer 2—the membership layer (also known as the fuzzification layer): Each node of this layer represents a membership function. The selected Gaussian membership function is computed according to equation (15)

where


Layer 3—the rule layer (the nodes of which are referred to as rules using fuzzy AND operation): The total number of rules can be denoted as

Layer 4—the output layer: All the input signals to this layer are calculated by summation to obtain the output linguistic variables
The concrete calculation process is introduced as follows

where

where


Structure of the fuzzy neural network system.
The proposed AFNNHSMC control system shown in Figure 4 contains four parts: an FNN control system, a learning algorithm with a self-tuning network parameter, a robust term, and its associated self-adaptive adjustment parameter. The FNN control system and its learning algorithm are designed to mimic the HSMC law that is the sum of the equivalent control law

where

where

where

Block diagram of the AFNNHSMC system.
If the FNN system adjusts only the weights without changing the linguistic rules, a high-precision tracking performance for a nonlinear underactuated system is not guaranteed in a deteriorating environment. Therefore, the expansion of

where

By replacing equation (25) with equation (27), the approximation error


where

Due to its powerful approximation ability, an FNN is used to learn the control law

where

It is assumed that the total error, D, is written as

where Q is the bound of the total uncertainties and
To calculate the self-tuning parameters of FNNHSMC, the Lyapunov function candidate is chosen as follows

where
Therefore, the update laws of the FNN parameters are designed as follows


And the robust term and its update law are defined as follows


where K is a positive constant. Then, the derivative of V can be calculated as

According to equation (38), the derivative of the Lyapunov function candidate

Integrating on the interval [0, t], we obtain

According to equation (35),

From equation (41), it follows that the derivative of the function
Remark 1
The robust term contains the sign function

where
Simulations and discussion
Example 1
In this example, a single-pendulum-type overhead crane system, as shown in Figure 5, is considered as a simulation example to verify the performance of the AFNNHSMC. At the beginning, four system functions in Figure 5 are described as follows 15

where

Structure of the single-pendulum-type overhead crane system.
At the same time, the control gains of both the AFNNHSMC and the HSMC are listed as follows:
There are two important system parameters, payload mass (m) and cable length (L), respectively, that have a negative impact on the system control performance. To prove the robustness of the proposed control system, it is assumed that those two parameters change as follows:
Simulation parameter case A: L = 1.05 m and m = 5 kg.
Simulation parameter case B:
It is clear that the different initial parameters can lead to different results, especially for an underactuated system. Therefore, if the proposed control system does not have a wide operating range, the system will not have the ability to track the desired signal when the initial parameters are changed. Thus, the following initial parameters are chosen to verify the effectiveness of the AFNNHSMC under a wide operating range:
Initial simulation case 1:
Initial simulation case 2:
Initial simulation case 3:
Initial simulation case 4:
The control task has two folds: fast track the trolley to the desired position, and small swing of the payload. According to the required task, two subsystems’ sliding surfaces,
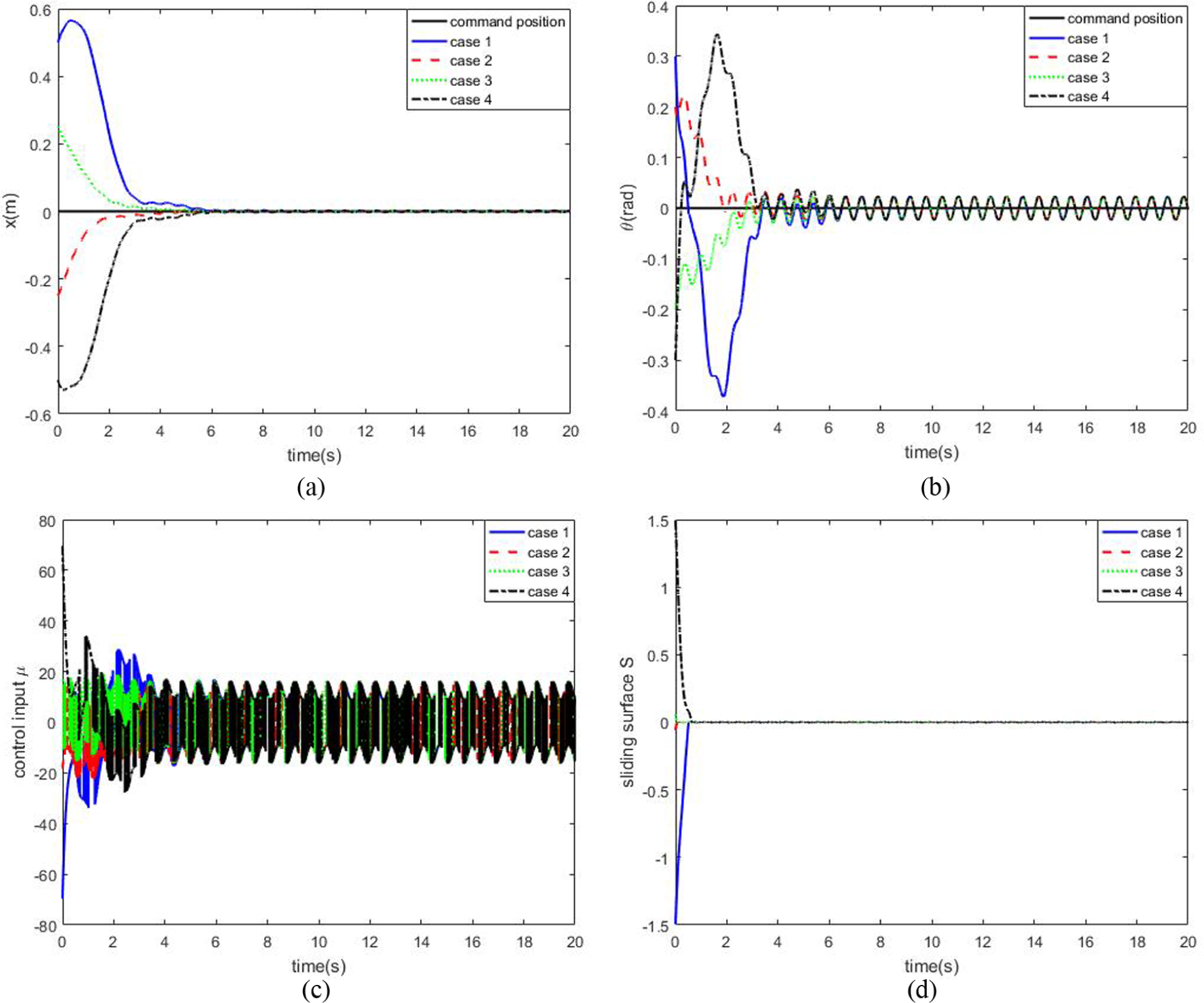
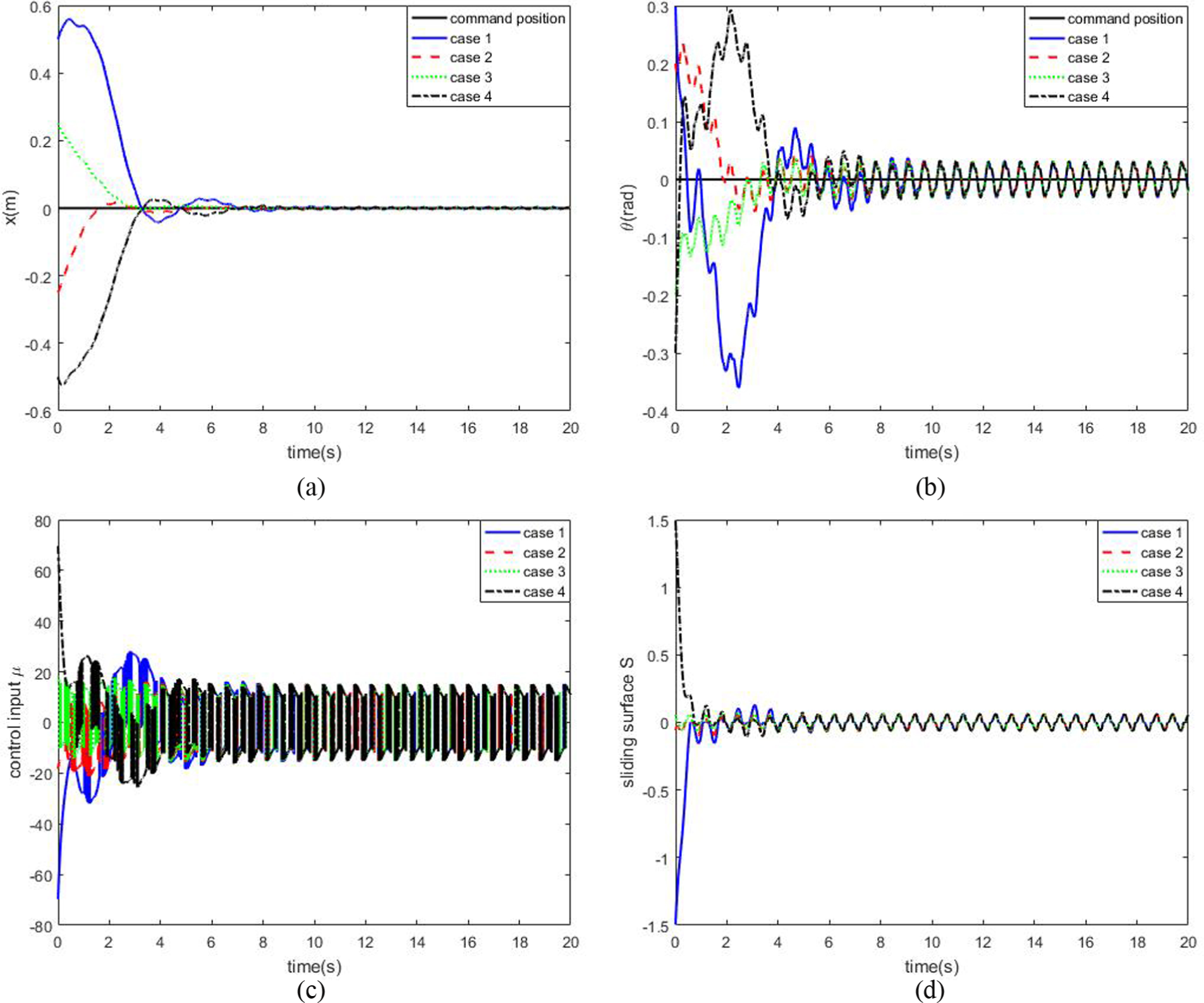
In section “HSMC,” the HSMC is proposed to verify the superior performance of AFNNHSMC. All the simulation results of the proposed AHSMC and AFNNHSMC schemes for the single-pendulum-type overhead crane system are depicted in Figures 6–9, respectively. Figures 6(a) and (b), 7(a) and (b), 8(a) and (b), and 9(a) and (b) show the tracking responses of the trolley position and the swing angle; Figures 6(c), 7(c), 8(c), and 9(c) show the related control force to the trolley; Figures 6(d), 7(d), 8(d), and 9(d) show the sliding surface of the layer n. The numerical simulations of HSMC under the condition of the simulation parameter cases A and B without external disturbance are shown in Figures 6 and 7, respectively. From Figures 6(a), (b), and (d) and 7(a), (b), and (d), when the system’s parameters are changed, a high-precision tracking result for x and

The simulation of HSMC under the simulation parameter case A and without external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.

The simulation of HSMC under the simulation parameter case B and without external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.
The simulation of HSMC under the simulation parameter case A and with external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley;and (d) The sliding surface of layer n.
The simulation of HSMC under the simulation parameter case B and with external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.
Now, the proposed AFNNHSMC is implemented to control a single-pendulum-type overhead crane system. As shown in Figures 10(a), (b), and (d) and 11(a), (b), and (d), the tracking performance of the proposed control system is similar to that of the HSMC. The result illustrates the validity of the proposed control system. Moreover, it is apparent that the undesirable chattering phenomenon, which exists in the HSMC, can be eliminated by online approximation of the HSMC law, estimation of the uncertain bound, and the use of a saturation function to replace the sign function shown in Figures 10(c) and 11(c). To further validate the robustness of AFNNHSMC, when considering an external disturbance, the error of the trolley position x and the swing angle
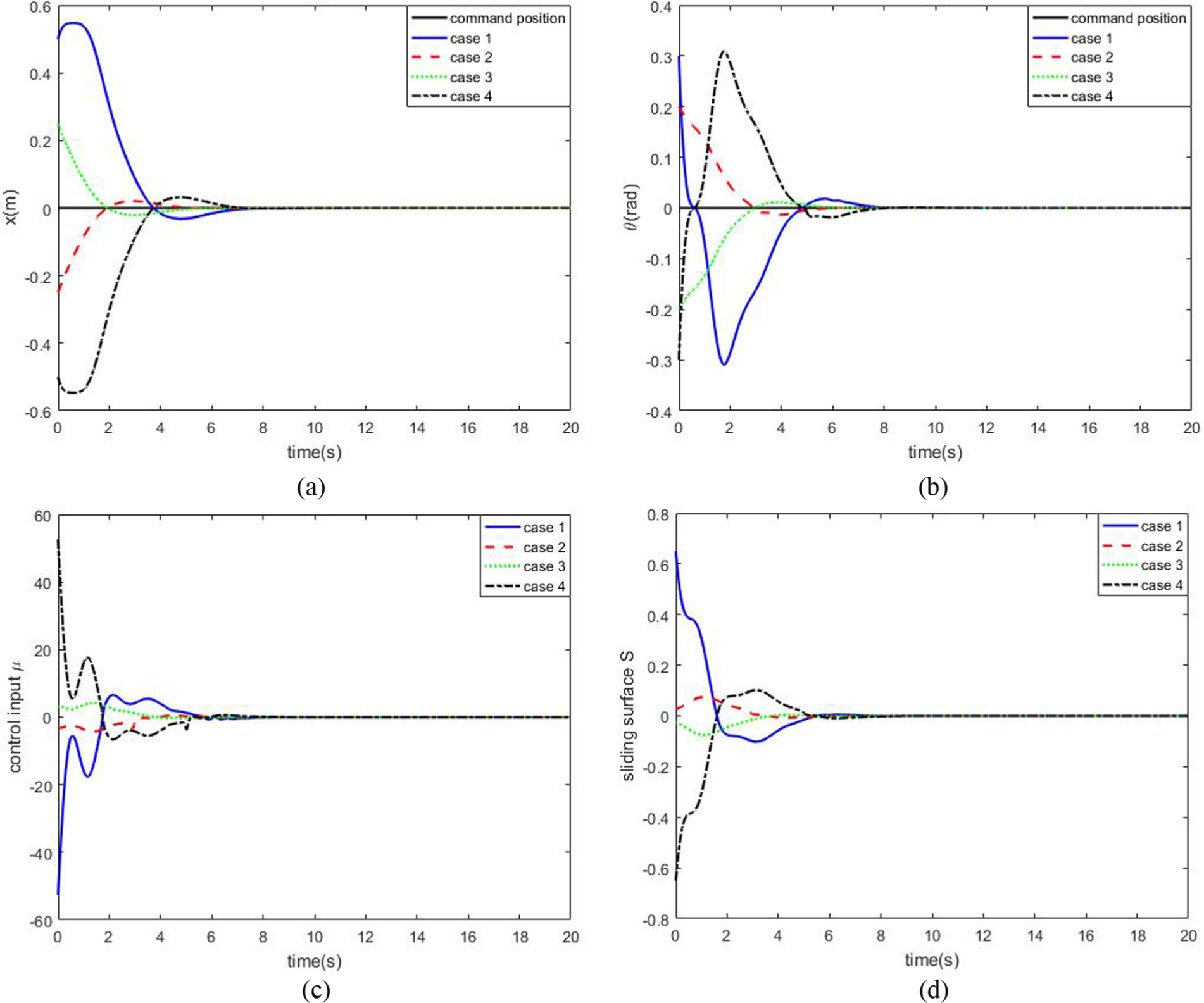
The simulation of AFNNHSMC under the simulation parameter case A and without external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.

The simulation of AFNNHSMC under the simulation parameter case B and without external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.

The simulation of AFNNHSMC under the simulation parameter case A and with external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.

The simulation of AFNNHSMC under the simulation parameter case B and with external disturbance: (a) The tracking response of the trolley position; (b) The tracking response of the swing angle; (c) The related control force to the trolley; and (d) The sliding surface of layer n.

The simulation parameters of the FNN system with external disturbance, and both in the simulation parameter case A and in initial simulation case 1: (a) The weights; (b) The means of the Gaussian functions; and (c) The standard deviations of the Gaussian functions.
The performance of the AFNNHSMC is summarized in Tables 1 and 2, which show the simulation results for HSMC and AFNNHSMC in the initial simulation case 1. The results (columns 6 and 7 of Tables 1 and 2) show that when the system deals with both parameter changes and external disturbances, the values of setting time, max/min error, mean square error (MSE), and tracing error obtained for AFNNHSMC are smaller than those obtained for HSMC. In fact, remarkably, the settling time and tracking error show that the HSMC performance worsens with increased environmental complexity. By contrast, whatever the case is, the AFNNHSMC performance fluctuates in a very small range. In conclusion, the AFNNHSMC method can achieve a better performance than the conventional HSMC method in the environment with both parameter changes and external disturbances.
Control performance of the trolley position under initial simulation case 1.

HSMC: hierarchical sliding mode control; AFNNHSMC: adaptive hierarchical sliding mode control based on fuzzy neural network; MSE: mean square error.
The bold values signifies the advantages of the AFNNHSMC method.
Control performance of the swing angle under initial simulation case 1.

HSMC: hierarchical sliding mode control; AFNNHSMC: adaptive hierarchical sliding mode control based on fuzzy neural network; MSE: mean square error.
The bold values signifies the advantages of the AFNNHSMC method.
Example 2
In this example, an inverted pendulum system will be adopted to further verify the effectiveness of the developed AFNNHSMC method compared with an HFSM decoupling controller proposed in Lin and Mon. 19 The four system functions in Figure 15 are described as follows 20

where

Structure of the inverted pendulum system.
All the simulation results of the HFSMC and AFNNHSMC schemes for the inverted pendulum system are depicted in Figures 16 and 17. Figures 16(a) and (b) and 17(a) and (b) show the tracking responses of the pendulum angle and the cart position, respectively. We can see from these figures that the pendulum angle and cart position can converge to the specific reference trajectory. In this article, the regulation and tracking performances for the inverted pendulum system are achieved with the same controller settings. Moreover, it is apparent that the values of setting time and max/min error obtained with AFNNHSMC are smaller than those obtained with HFSMC.

The simulation results of HSMC for the inverted pendulum system: (a) The tracking response of the pendulum angle; and (b) The tracking response of the cart position.
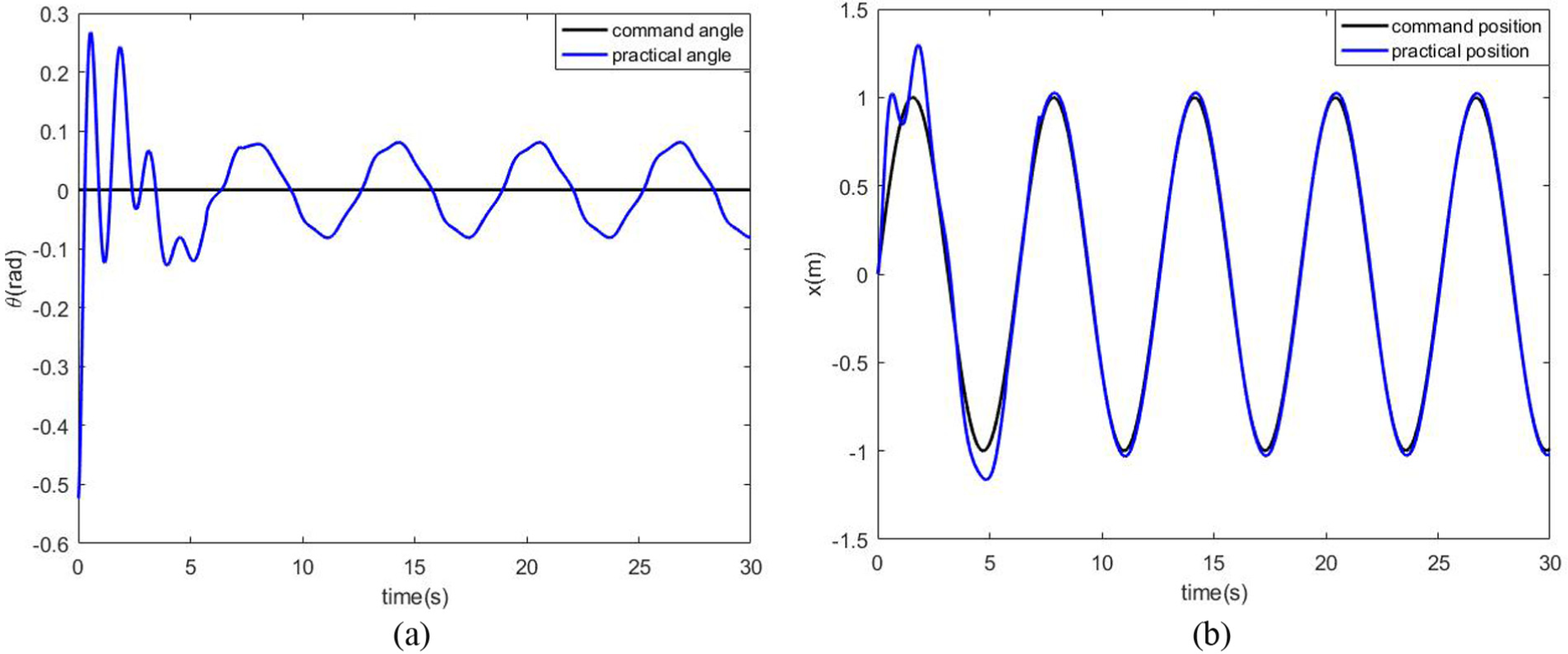
The simulation results of AFNNHSMC for the inverted pendulum system: (a) The tracking response of the pendulum angle; and (b) The tracking response of the cart position
Conclusion
In this article, a successful implementation of an AFNNHSMC, capable of realizing regulation stabilization and accurate tracking control simultaneously for a class of SIMO underactuated nonlinear systems, considering system uncertainties and time-varying external disturbances is presented. Since the underactuated dynamic system is constituted by several subsystems, an HSMC scheme is proposed to reduce the difficulty of the controller designing process. A model-free FNN system is then employed to approximate the HSMC law while inheriting the properties of HSMC. Based on the Lyapunov stability theory and Barbalat’s Lemma, the robust term is designed to track the uncertainties, including the FNN modeling error, and the asymptotic stability of the closed-loop system is guaranteed. Finally, the simulation results effectively illustrate the performance of the proposed method, including controller robustness. This is done by comparison with some conventional methods, under different simulation conditions, including different initial state values and different system parameters, with and without uncertainties. Furthermore, the proposed method does not only effectively reduce the chattering phenomenon, but also obviously reduce the accuracy requirements for the dynamic model when designing the controller. Future work will apply this approach to a practical robot system and will expand it to some MIMO underactuated systems, especially for underactuated wheeled inverted pendulum systems, 37 because this system is simultaneously subject to kinematic nonholonomic constraints and dynamic constraints, and the existing control designs for nonholonomic systems with either only kinematic or only dynamic constraints cannot be directly applied to this system.
Footnotes
Handling Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work has been performed during the 1-year visit of Xiaorong Huang at the Department of Electrical Engineering & Computer Science, University of Cincinnati, Cincinnati, OH under the China Scholarship Council Visiting Scholar Program. This study was also supported in part by the National Natural Science Foundation of China under Grant No. 51775452 and the Fundamental Research Funds for the Central Universities under Grant No. A09205020 51723-9.