
Abstract
A novel type synthesis method for a class of spatial multi-loop coupled mechanisms with translational degrees of freedom is proposed in the paper. The novel class of spatial multi-loop coupled mechanisms has a stable topology layout which consists of three branches and three coupled chains. The basic idea of the new structural synthesis method lies at replacing the inputs of one mechanism by the outputs of another, thereby combining several mechanisms, where the topology split method for the topological layout and corresponding degree of freedom splitting principle are provided. The synthesis of the target mechanism is transformed into synthesis of corresponding serial and parallel mechanisms thereby, and a class of spatial multi-loop coupled mechanisms is synthesized. To validate the new synthesis method and to present a theoretical basis for future application, kinematic analysis of a single translational mobility (1T) spatial multi-loop coupled mechanism and a symmetrical two translational degrees of freedom (2T) spatial multi-loop coupled mechanism is performed. This article enriches the family of the spatial mechanisms for further instructing the study of spatial multi-loop coupled mechanisms.
Keywords
Introduction
Type synthesis is the core of mechanical design. Over the past few decades, a variety of new mechanisms has been proposed and successfully applied in industry and elsewhere.1–3 Moreover, many effective type synthesis theories have been proposed for creative design. Huang and Li 4 proposed a constraint synthesis method based on screw theory and synthesized a large number of symmetrical lower-mobility parallel mechanisms. Similarly, Kong and Gosselin 5 proposed a virtual chain method to synthesize parallel mechanisms and a number of parallel mechanisms with varying mobility were synthesized. 6 Yang et al. 7 used the position and orientation characteristic equations for the topological design of robot mechanisms. Furthermore, using the concept of G f set, Yang et al. 8 presented numerous parallel mechanisms with branches consisting of closed loops. However, the methods mentioned above have only been proposed for parallel mechanisms.
The characteristics of spatial multi-loop coupled mechanisms (SMCMs) include high-load carrying capacity, good accuracy, and stability. In addition, the SMCM possesses diverse functions due to its diverse structures. The complicated coupled-chain connection between branches is one of the fundamental differences between SMCMs and parallel mechanisms. Whereas existing methods and theories on parallel mechanisms cannot be applied to novel coupled mechanisms, some innovative research has been carried out on SMCMs. Dai et al. 9 used constraint loop theory to analyze the mobility of a ball-flower toy; however, as the number of independent loops increases, the calculations become more complex. Inspired by Kirchhoff’s current law, Liu et al. 10 proposed a simple yet effective method for calculating degrees of freedom of SMCMs based on screw theory, and based on the method, a novel regular triangular bipyramid mechanism was designed and analyzed. 11 Cao12,13 synthesized a class of two-layer two-loop mechanisms based on mobility analysis and recently designed a new family of deployable mechanisms derived from this.14,15 Zeng and colleagues16,17 synthesized a variety of SMCMs based on mathematical logic and displacement group theory; however, the method is relatively complicated. Again, based on screw theory, Tian et al. 18 proposed a class of 2R2T hybrid mechanisms. Furthermore, a serial of SMCMs with rolling and creeping motion capabilities, called tensegrity robots, has been proposed. 19 Ding et al. 20 designed a class of spatial 6-degree-of-freedom (DoF) SMCMs, which was applied to the forging manipulator.
The major form of SMCMs is often a polyhedral mechanism, which have grown in popularity due to good stability and esthetics. Kipper et al. 21 introduced a family of spatial linkages with Cardan motion. Moreover, Wang and Kong 22 dealt with the construction of deployable polyhedron mechanisms by connecting spatial single-loop linkages. Kovacs et al. 23 proposed a kind of regular polyhedron deployable mechanism that maintains regular polyhedron structure during movement. Existing studies have focused on the mobility of output platform; however, the mobility of linkages is also important in certain environments.
Besides the wide application of 3T mechanisms, 1T and 2T mechanisms are also widely used in industry, for example, punching and sorting machines. The mainly planar structures of existing mechanisms with 1T and 2T have insufficient lateral stiffness and would become unreliable when the component force, which is perpendicular to the planar mechanism, was exerted.24,25 Spatial mechanisms may solve this problem; however, studies on 1T and 2T spatial SMCMs are lacking. Therefore, this article proposes a novel class of translational SMCMs. The notations of P, R, and C represent the prismatic pair, rotating pair, and cylindrical pair, respectively.
The outline of the paper is organized as follows. In section “Type synthesis method for a novel class of translational SMCMs,” the type synthesis method for constructing a novel class of translational SMCMs is proposed. In section “Kinematic analysis of new 1T SMCM,” a proposed 1T SMCM consisting of R pair and C pair is constructed and analyzed. Similarly, a new 2T SMCM is analyzed in section “Design and analysis of a novel 2-DoF mechanism.” Finally, the conclusions are summarized.
Type synthesis method for a novel class of translational SMCMs
The most obvious feature of a SMCM is the complex connections between branches, which differs from parallel mechanisms. Therefore, a SMCM can be regarded as one composed of a combination of serial and parallel mechanisms. In addition, except for the moving and fixed platforms, the linkages connected directly to more than two kinematic pairs are called coupled nodes, and the branches between two coupled nodes are called coupled chains. In general, the driving joints of a parallel mechanism are the joints connected to the fixed platform, and the DoF, the number of branches, and the number of driving joints is equal.
A type synthesis method for this class of SMCMs is presented, which mainly based on the idea of replacing the inputs of one mechanism with the outputs of another is used for synthesis of target mechanism. Following this basic idea and considering a SMCM as a combination of several mechanisms, a topology splitting method and a DoF splitting principle are proposed, which provides an approach for determining the target mechanism module and target DoF in each level of separation. As thus, type synthesis of a SMCM is transformed into that of a three-limb parallel mechanism, a two-loop mechanism as well as a serial chain. All of above make up the content of the type synthesis method, which will be detailedly described in the following section, at meantime, the synthesized results shall be given.
Basic type synthesis idea from a 1T SMCM module
In this article, the type synthesis idea which replacing the inputs of one mechanism with the outputs of another is used for synthesis of target mechanism. To introduce the idea in detail, a simplest basic 1T SMCM module combining two single closed loops is introduced. The module has two branches and a coupled chain connecting coupled nodes. Two coupled nodes can also be regarded as two moving platform, short for PM2 and PM3, as shown in Figure 1. By some separations, a SMCM may be divided into several such modules like Figure 1 shows. Therefore, the basic idea can be extended to synthesize the SMCM.

Sketch of combination of two single loops: (a) a topological layout of SMCM; (b) separation of the topological layout; (c) two translational loop chains; and (d) A new 1T SMCM.
Sketch of combination of two single-loop modules is shown in Figure 1. Figure 1(a) and (b) describes how to split a basic SMCM module into two modules, while Figure 1(c) and (d) demonstrates how to combine two modules by replacing inputs of the upper mechanism by outputs of the other. The topology layout of a basic SMCM with two branches and a coupled chain is presented in Figure 1(a). The connections between base and moving platform 1, short for PM1, represent two branches, and the connection between PM2 and PM3 represents a coupled chain.
The topology can be split into two parts at the coupled nodes PM2 and PM3. By virtually adding two kinematic pairs, the coupled nodes are connected to a fixed platform and the basic module is divided into two-loop chains, as shown in Figure 1(b).
The single closed loop in the upper part of Figure 1(c) is a 2T loop chain, and driving joints connecting to the fixed platform are both prismatic pairs (P pairs). The lower part in Figure 1(c) is a 1-DoF loop chain with two moving platforms (PM2 and PM3) whose directions are both the same as that of the driving P pairs of the upper 2T loop. A new mechanism is obtained by combining the two-loop chains, wherein the driving pairs (dotted lines) of the 2T loop are replaced by the moving platforms of the 1-DoF loop, as shown in Figure 1(d).
The moving platform PM1 of the 2T loop chain (shown in Figure 1(b)) can be depicted based on screw theory as

where
As to the 1-DoF loop chain, when PM2 is regarded as the moving platform of the 1-DoF loop chain, its motion screw is

The motion screw of the moving platform of the new mechanism is a linear combination of
The above analysis represents the DoF of the moving platform is 1T, whereas coupled nodes also exhibit translational motions. In screw theory, any rigid body’s rotation can be depicted as a linear vector which is composed of six numbers. The first three numbers of a linear vector depict the direction of the rotating axis, and the last three numbers depict the position of the rotating axis. But any rigid body’s translation can be depicted as a couple which parallel to the direction of the translation. So the case for which the coupled nodes and moving platform have rotational DoF is very complex. The direction of the axis of rotation, in addition to the position of the axis of rotation, must be considered. In some cases, the axes of the rotating pairs are required to be handed over to a point.4–8 Compared with the rotation, the direction of the translation is only need to be considered. Thus, SMCMs whose coupling nodes and moving platform are all translational will be studied in this article. Type synthesis of SMCMs with rotational motion will be investigated in future.
In all, the basic idea can be extended to synthesize a target SMCM. Similar to steps of the basic SMCM shown in Figure 1(a)–(d), type thesis for a SMCM will be performed following four steps.
The first step is to determine the topological layout of target mechanism. Because the SMCM has diversity and randomness, the topological layout of a kind of SMCMs needs to be determined before type synthesis.
The second step is separating the topological layout and dividing it into a number of topological layouts of serial and parallel mechanisms. How to separate the topological layout of the target mechanism is the core part of the type synthesis method. And topology splitting method for the target mechanism of this article is introduced in detail in the following.
The third step involves synthesizing the serial and parallel mechanisms obtained by some separations. Target DoF of split mechanisms is determined by a DoF splitting principle, referred to in section “DoF splitting principle.” Synthesis methods for serial and parallel mechanisms are relatively mature, so this article does not involve the details of them.
The fourth step is to combine the serial and parallel mechanisms. In this article, the topological layout of target mechanism is determined, as shown in Figure 2.
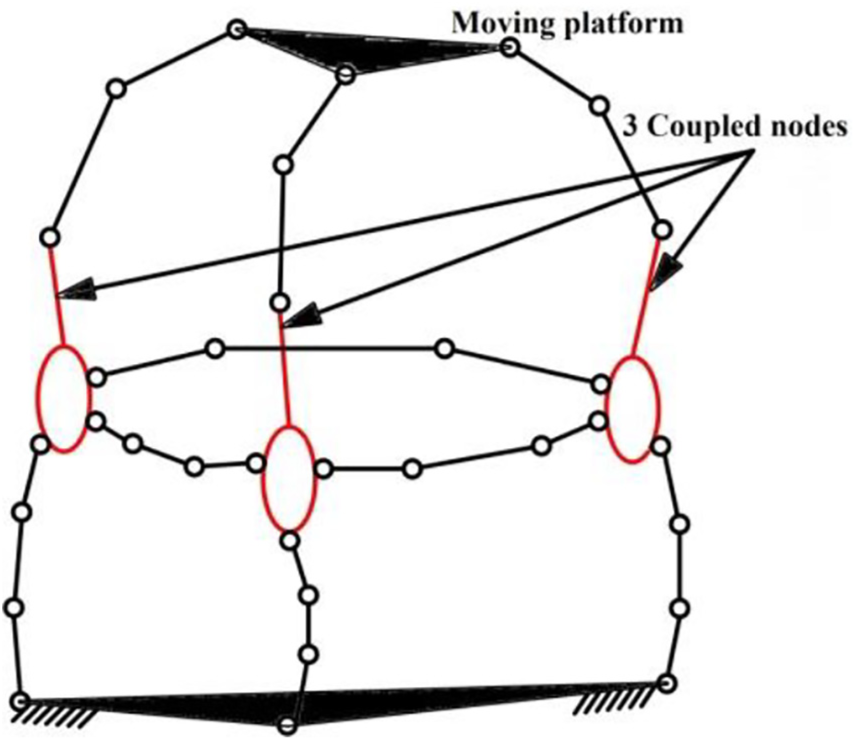
Illustration of a target mechanism.
A SMCM can be divided into several parallel and serial mechanisms using various splitting methods and different mechanisms are obtained depending on different splitting methods. Aiming at the topology layout as shown in Figure 2, a splitting method of topology and a corresponding splitting principle of DoF are proposed in relation to the above analysis. The topological layout of the target SMCM can be divided into topological layouts of several serial and parallel mechanisms using the proposed splitting method of topology, and the DoF of the serial and parallel mechanisms can be determined according to the splitting principle of DoF. Finally, the target mechanism is obtained by type synthesizing and combining the serial and parallel mechanisms.
Topology splitting method and DoF splitting principle
Topology splitting method
A SMCM may have many different ways to be split. And the topology splitting method proposed in this section is aimed at the topology layout of the target mechanism, as shown in Figure 2.
The first-level separation: Starting at the moving platform, the mechanism is split into the upper and lower parts by first level of separation, which are separated from the coupled nodes directly connected to the moving platform by kinematic chains which do not contain any coupled node. The part containing the moving platform is upper mechanism, the other one is lower mechanism. The upper mechanism is completed by adding virtual actuators corresponding to the output platform of the lower mechanism. The number of coupled nodes equals the number of branches of the upper mechanism.
The following levels of separation: Apart from the first level of separation, each level of separation is aimed at the lower mechanism of the upper level. Any coupled node of the lower mechanism, obtained using the upper level separation, is selected as its moving platform. The following levels of separation are the same as the first-level separation. Topology layout of the target mechanism is separated level by level until only a single loop remains.
If the moving platform is directly connected to the base via a single chain that does not contain any coupled node, the chain is split out as a serial mechanism.
DoF splitting principle
According to the analysis in section “Basic type synthesis idea from a 1T SMCM module,” the following relationships can be derived:
1. Actuators connecting to fixed platform of the upper mechanism would be replaced by the moving platforms of the lower mechanism. In IFToMM terminology, the degrees of freedom (mobility/DoF) is defined as the number of independent coordinates needed to define the configuration of a kinematic chain or mechanism. Based on the definition, DoF of a mechanism is greater than or equal to zero.
When the actuators are locked, the remaining degree of freedom of the upper mechanism is

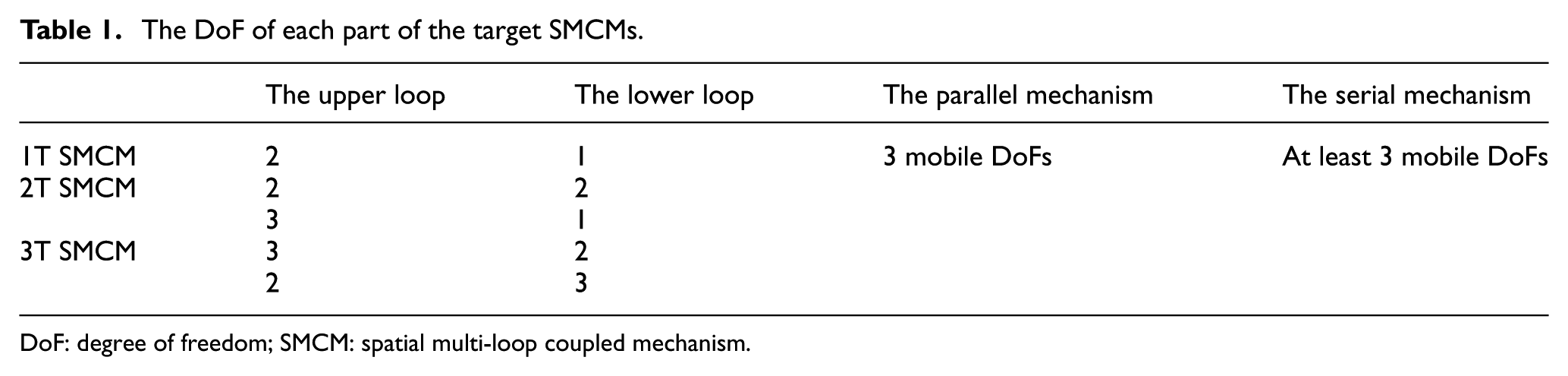
2. The target DoF f is dynamic in different levels of separation. In the first level of separation, f is the DoF of target SMCM. In any other level of separation, the DoF of the lower mechanism obtained by this level of separation is denoted as f2, while DoF of lower mechanism obtained by a higher level of separation is regarded as the target DoF, that is, the lower mechanism obtained by this level of separation belongs to the lower mechanism obtained by the higher level of separation. Obviously, the following relation is obtained

After combination, actuators connecting to fixed platform of the upper mechanism are replaced by moving platforms of the lower mechanism. Namely, the n actuators of the upper mechanism are replaced by f2 actuators of the lower mechanism.
3. In the case of no local DoF, only the translational DoF is considered. Therefore, the DoF of mechanisms obtained via splitting cannot be greater than 3 translational freedoms.
4. As analyzed above, a target mechanism can be divided into an upper part and a lower part in each level of separation, whereafter, the n independent inputs of the upper mechanism are replaced by the outputs of the lower mechanism. Therefore, the target DoF f is the sum of lower part’s DoF (f2) and upper part’s remaining DoF (
In conclusion, the relationships can be derived
From the analysis in section “Basic type synthesis idea from a 1T SMCM module,” the moving direction of output platform of the new mechanism is uncertain. Therefore, the serial mechanisms cannot impose constraints on the connected moving platform. Type synthesis theory of parallel mechanisms is relatively well established based on screw theory.4–8 In addition, type synthesis of single closed-loop chains is also relatively mature.5,26
After obtaining the corresponding serial and parallel mechanisms, the target mechanism can be obtained by assembling them. As the actuator of the upper mechanism, the direction of movement of output platforms of lower mechanism varies during motion. Therefore, in synthesizing the lower mechanism, the moving direction of actuators of the upper mechanism must be considered carefully. Taking 3-PRRR parallel mechanism as an example, the axis of P pair cannot be perpendicular to the R pairs in the same branch. When this mechanism is used as the upper mechanism, the movement direction of output platforms of the lower mechanism cannot always be perpendicular to the R pairs.
Topology and DoF splitting
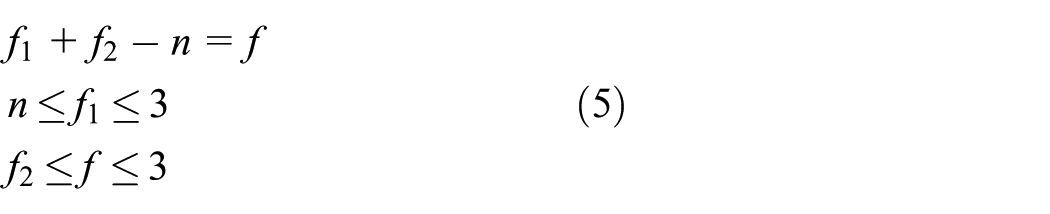
Based on topology splitting method, the target SMCM’s topology layout in Figure 2 can be divided into an upper and a lower part at the coupled nodes via first-level separation. And the upper mechanism is a three-branch parallel mechanism, as shown in Figure 3. The lower part can be further divided into a serial mechanism and a two-loop mechanism, as illustrated in Figure 4. In addition, according to the module in Figure 1, the two-loop mechanism can be further divided into upper and lower loops via second-level separation. Therefore, the target mechanism is divided into four mechanisms: a parallel mechanism, a serial mechanism, an upper loop, and a lower loop. Therefore, we can synthesize such a kind of translational SMCMs by synthesizing and combining the four mechanisms.
Sketch of the parallel mechanism.

Sketch of the separation of the lower part.
The moving platform is constrained by the serial mechanism and the two-loop mechanism simultaneously. From analysis in the paper, motion of the moving platform of the two-loop mechanism is translational, and its direction is unknown. If the serial chain exerts a constraint couple on the connected moving platform, the constraint couple would be overconstraint, which is possible. If the moving platform of the two-loop mechanism is moving in space, and the serial chain only allows the moving platform move in a plane, the serial chain would constrain the motion of the moving platform. Due to the unknown direction of the moving platform of the two-loop mechanism, the serial chain must have at least three translational DoF.
For constructing a 1T SMCM, in the upper and lower mechanisms obtained via first-level separation, the number of branches of the upper mechanism is
In the upper and lower loops obtained via second-level separation, the number of branches of the upper loop is
Similarly, as to the 2T SMCM and 3T SMCM, the DoF of each mechanism is determined based on the DoF splitting principle. For constructing a 2T SMCM, in absence of a rigid substructure, the DoF of the parallel mechanism is 3, the DoF of the upper loop chain is 3, and the DoF of the lower loop chain is 1. Another situation is that the DoF of both the upper loop and lower loop chain is 2. For constructing a 3T SMCM, the DoF of the parallel mechanism is 3, the DoF of the upper loop chain is 3, and the DoF of the lower loop chain is 2. Another situation is that the DoF of the upper loop chain is 2 and the DoF of the lower loop chain is 3.
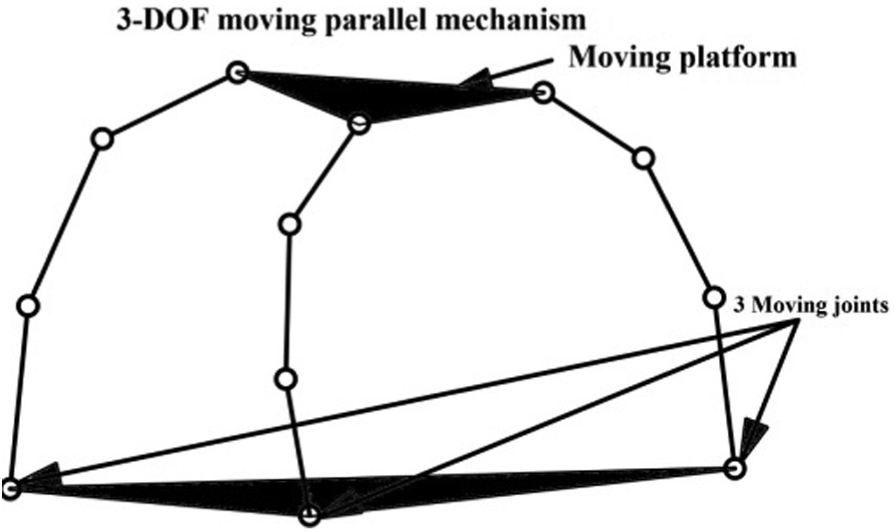
The DoF of each part of the translational SMCMs is listed in Table 1. According to the analysis of section “Basic type synthesis idea from a 1T SMCM module,” all of the input pairs of upper mechanism are P pairs, and the motions of output platforms of lower mechanism are translational.
The DoF of each part of the target SMCMs.
DoF: degree of freedom; SMCM: spatial multi-loop coupled mechanism.
Type synthesis of parallel mechanisms
Therefore, the target mechanism is divided into four mechanisms: a parallel mechanism, a serial mechanism, an upper loop, and a lower loop. First, the parallel mechanism is synthesized in this section. In this article, only symmetrical 3-DoF translational parallel mechanisms whose joints connecting to fixed platform are P pairs are constructed in this article. The branch of the target parallel mechanism can be divided into three cases. 4
Case 1: The branch contains three pairs. In this case, the constraint screws of branch are three couples that constraint three rotations in space, and the basic motion screw system of the branch is

This screw system denotes three P pairs which are non-coplanar.
Case 2: The branch contains four pairs. In this case, the constraint screws of branch are two couples that constraint three rotations in the same directions. Assuming the couples go along Y- and Z-coordinate, respectively, the basic kinematic screw system of the branch is

The linear combinations of the screw system can denote five types of kinematic chains.
Case 3: The branch contains five pairs. In this case, the constraint screw of branch is only one couple that constraints just one rotation in the same direction. Assuming the couple is located on YZ plane, the basic motion screw system of the branch is

The linear combinations of the screw system can denote six types of kinematic chains. All types of kinematic chains of 3-DoF symmetrical parallel mechanisms are listed in Table 2.
Type synthesis of 3-DoF symmetrical parallel mechanism.

DoF: degree of freedom.
Type synthesis of two-loop mechanism
The lower part obtained via the first-level separation is composed of a two-loop mechanism and a serial mechanism with at least three mobile DoFs. The two-loop mechanism can be split into an upper loop with two translational driving joints and a lower loop with two translational output platforms by the second-level separation. For type synthesis theory of single-loop chain has been very mature,5,26 the appropriate loop chains can be obtained, as shown in Tables 3–7.
Single-loop chains of 1T SMCM.
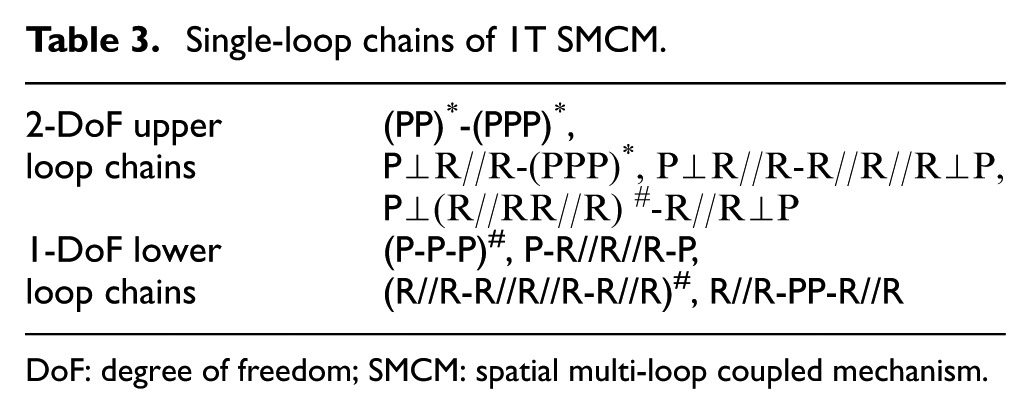
DoF: degree of freedom; SMCM: spatial multi-loop coupled mechanism.
First case of single-loop chains of 2T SMCM.

DoF: degree of freedom; SMCM: spatial multi-loop coupled mechanism.
Second case of single-loop chains of 2T SMCM.

DoF: degree of freedom; SMCM: spatial multi-loop coupled mechanism.
First case of single-loop chains of 3T SMCM.

DoF: degree of freedom; SMCM: spatial multi-loop coupled mechanism.
Second case of single-loop chains of 3T SMCM.

DoF: degree of freedom; SMCM: spatial multi-loop coupled mechanism.
In Tables 3–7, the pairs on both sides of “-” are connected to moving platforms. “*,”“#” denote that the pairs in bracket are not coplanar or not parallel, respectively. “⊥,”“∥”denote that the pairs connected by them are perpendicular and parallel, respectively.
Finally, a novel family of translational SMCMs is obtained by combining the corresponding mechanisms obtained above. The obtained SMCMs, shown in Figure 5(a)–(c), are 1T, 2T and 3T, respectively. In Figure 5, kinematic pairs are rotating pairs except the marked kinematic pairs.
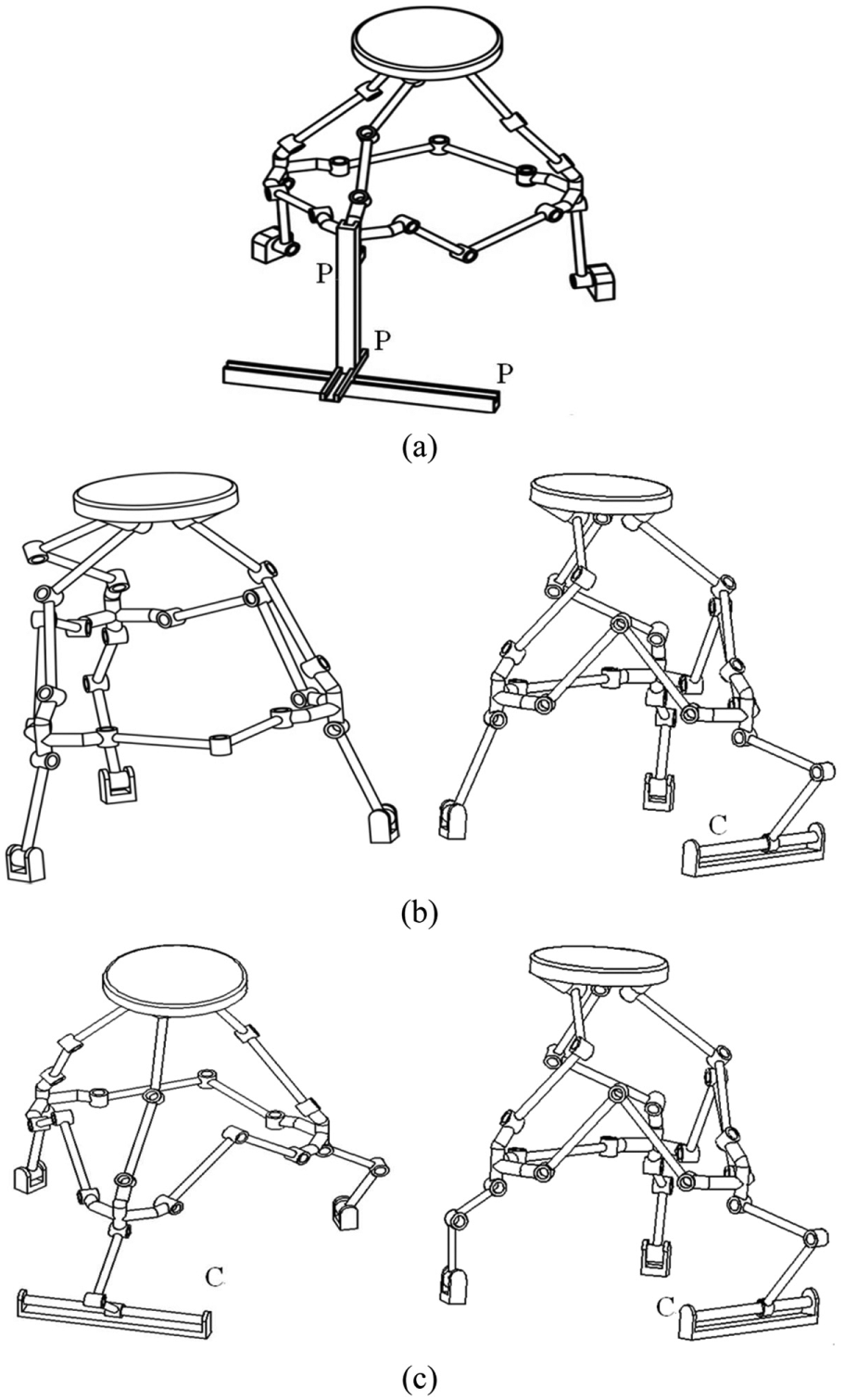
Five new translational SMCMs: (a) a novel 1T SMCM; (b) two novel 2T SMCMs; and (c) two novel 3T SMCMs.
Based on the above content, to clarify the synthesis method, a flow chart of the procedure for type synthesis of the target SMCM is shown in Figure 6.

The flow chart of the type synthesis method.
Kinematic analysis of new 1T SMCM
In this section, a new SMCM obtained above, shown in Figure 7, is analyzed. 3-PRRR and CRR are selected out as the parallel mechanism and the serial mechanism, respectively. P⊥R∥R-R∥R∥R⊥P and (R∥R-R∥R∥R-R∥R)# are selected out from Table 3 as upper and lower loops, respectively. Forward position solution is carried out to verify the synthesis method proposed in this article, and the trajectory of the moving platform of the mechanism is obtained via the forward position solution.
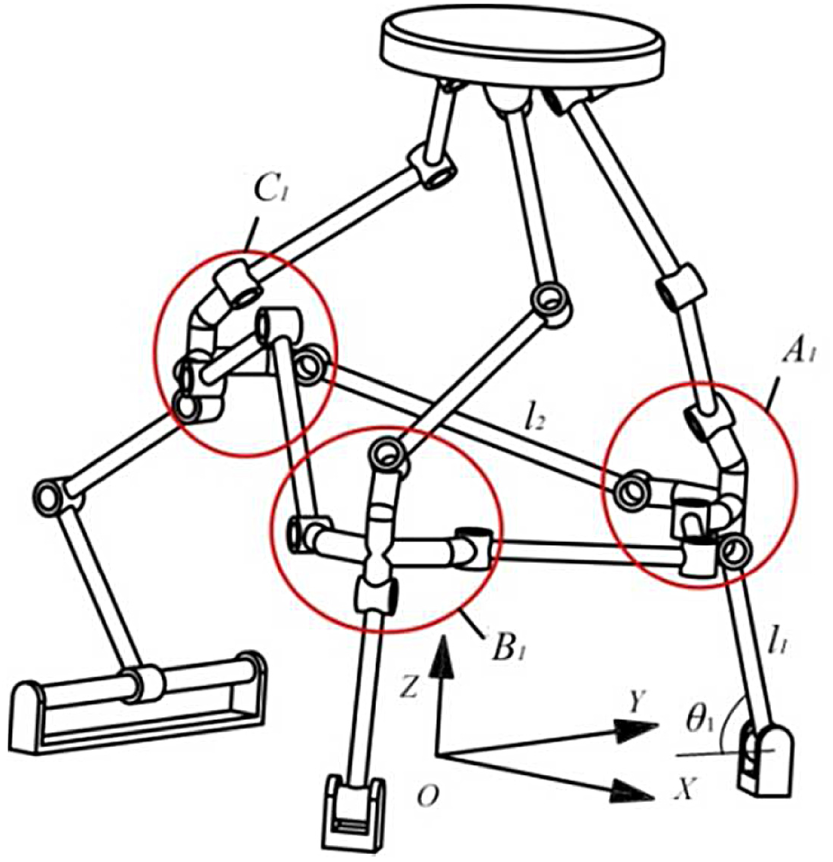
A new SMCM.
Mechanism description
The new mechanism is composed of several R pairs and a C pair, and the axes of R pairs in the same branch are parallel. The fixed platform is composed of two R pairs and one C pair, and the axes of them form an equilateral triangle. The structures of platform A1 and C1 are shown in Figures 8 and 9, respectively. Since the motion of A1, B1, and C1 is translational, to facilitate the calculation, the three coupled nodes are regarded as three points A1, B1, and C1 in the following calculation. Based on this, the rotation pairs of the coupling nodes A1, B1, and C1 are only in different directions, and their axes intersect at A1, B1, and C1, respectively. The axes of the pairs in branch A1B1 are perpendicular to the fixed platform in the initial posture.
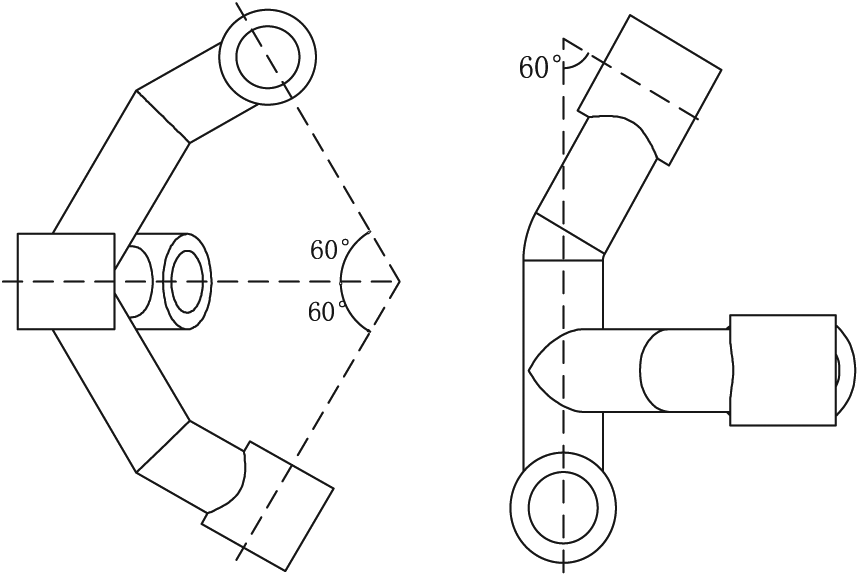
Sketch of coupled node A1.

Sketch of coupled node C1.
The coordinate system is shown in Figure 7. The origin is located at the center of the fixed platform. The X-axis is along the direction of the intersecting line of the symmetrical plane and the fixed platform. The Z-axis runs along the vertical direction. The coupled nodes A1 and B1 are symmetric about the XZ plane in movement process.
Forward position kinematics solution
The coordinates of A1 and B1 can be determined based on the property of symmetry

where r1 is the radius of fixed platform and l1 is the length of chain L1.
Due to the special structure, we can obtain an equilateral triangle when points A1, B1, and C1 are projected into the XY plane, as shown in Figure 10. Therefore, the X-coordinate of point C1 is


Top view of partial mechanism.
The Y-coordinate of point C1 is always equal to zero.
In addition, the coordinate of C1 can be obtained using the following function

where l2 is the length of chain L2.
So, the coordinate of C1 is

From equation (12), we can know that there are two solutions to the Z-coordinate of C1. To avoid interference between platform C1 and the fixed platform, only the larger solution of the Y-coordinate is reserved in the following calculation.
As shown in Figure 11, points A2, B2, and C2 are midpoints of the axes of the R pairs on the moving platform, and they are coplanar to and centrally symmetric about the center of the moving platform. Assuming the coordinate of the center of the moving platform is P

where r2 is the radius of the moving platform.

Upper part of novel mechanism.
Point A2 is located on plane n1, which is perpendicular to the axis of R pair A2 and goes through the point A1. Similarly, point B2 is located on the plane n2, which is perpendicular to the axis of R pair B2 and goes through point B1. In addition, point C2 is located on the plane n3, which is perpendicular to the axis of R pair C2 and passes through point C1. The above three planes can be expressed as

Substituting equation (13) into equation (14)

The solution of equation (15) can be obtained

Trajectory of moving platform
The trajectory of the moving platform can be obtained from the forward position kinematic solution. All necessary structural parameters are given. It is assumed that the length of each link is equal to 180 mm, r1 = 200 mm, and r2 = 50 mm. The trajectory of the moving platform can be presented in MATLAB, as shown in Figure 12. It can be found that although the mobility is 1T, the trajectory of the moving platform is not a straight line but a general curve located on the XZ plane. Changing the parameters of the mechanism, the motion trajectory of the mechanism can be designed, which suggests good prospects for the application of this type of mechanism, for example, in an aircraft landing gear.

Trajectory of moving platform.
According to the analysis in this section, the Y-coordinate of point C1 is zero, which means the path of C1 is on the symmetrical plane. If the serial mechanism has only one translational DoF, this will limit the motion of C1. Therefore, the serial mechanism should demonstrate at least two-dimensional planar translation and moves on the symmetrical plane. Thus, the C pair can be replaced by an R pair with the same axial direction in this mechanism.
Design and analysis of a novel 2-DoF mechanism
Replacing the upper loop of the 1T mechanism, P⊥R∥R-R∥R∥R⊥P, presented in section “Kinematic analysis of new 1T SMCM” with P⊥R//R//R-R//R//R⊥P, listed in Table 5, and replacing the C pair by an R pair with the same axial direction, a new 2T SMCM is obtained, as shown in Figure 13.
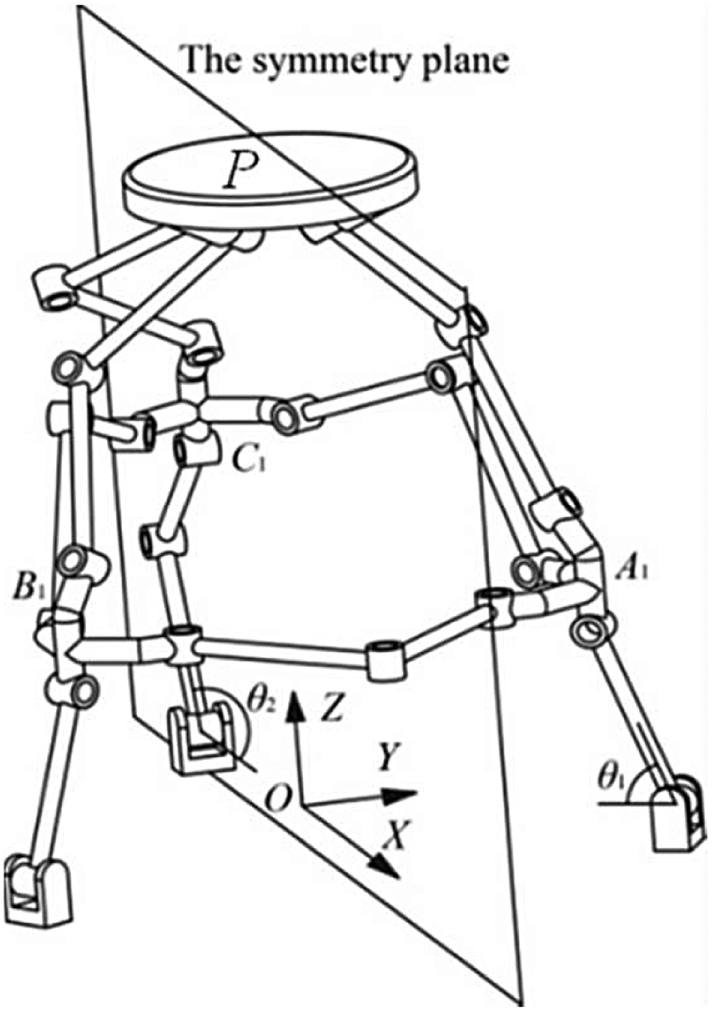
New 2T multi-loop coupled mechanism.
Forward position kinematics solution
The coordinate system of the new 2-DoF mechanism is the same as the coordinate system in section “Mechanism description” and is shown in Figure 13.
The coordinates of A1 and B1 can also be obtained using equation (9). Moreover, the X-coordinate of point C1 can be obtained from equation (10). As shown in Figure 13, the coordinate of Point C1 can be expressed as

Then, we can obtain the coordinate of point C1 by solving equations (9), (10), and (17)

where l2 and l3 are the link lengths, as shown in Figure 14. Similarly, the larger solution of the Z-coordinate of C1 is reserved in the following calculation.

Right elevation of lower part of the mechanism.
According to the analysis of the 1T mechanism, the coordinate of the midpoint of the moving platform of the new 2-DoF mechanism can always be described in equation (16) which is functions of the coordinates of A1, B1, and C1.
Inverse position kinematics solution
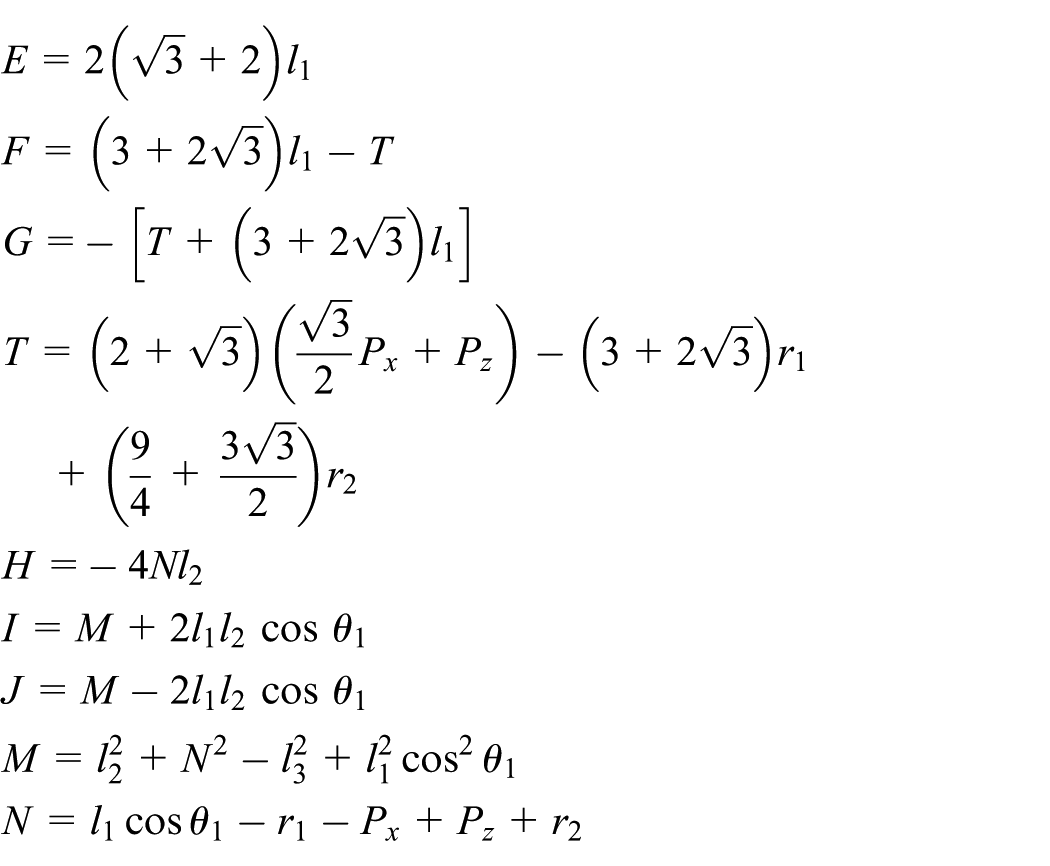
The inverse position kinematics solution is the process of obtaining angle
Solving equations (9), (14), and (18), we can obtain the expressions for

where
Numerical simulations
To verify the solutions, numerical simulations are performed in MATLAB to generate the forward and inverse position kinematics solutions. Assuming that each linkage is assumed equal to 120 mm, the radius of the fixed platform is set as 210 mm, and the radius of the moving platform is 50 mm. Results are presented in Tables 8 and 9. Based on these results, the kinematics solution is correct.
Numerical simulations of the forward position kinematic solution.

Numerical simulations of the inverse position kinematic solution.

Analysis of velocity and acceleration
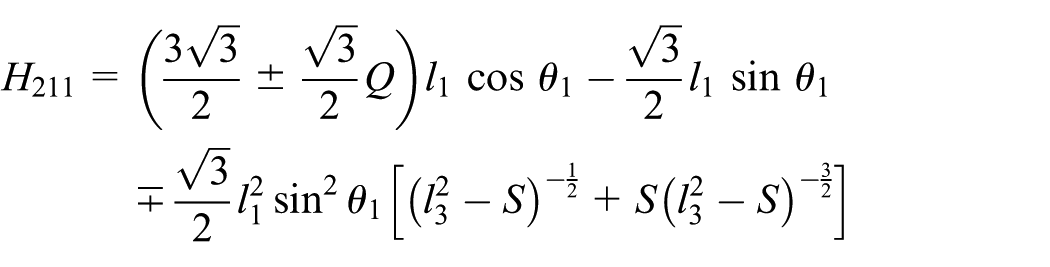
Taking the derivative of equations (9), (16), and (18) with respect to time, we obtain

where

where

Taking the derivative of equation (20) with respect to time, we obtain

where
where








Working space analysis
When the limitation of range of kinematic pairs and interference between linkages are neglected, we can obtain the reachable working plane of the moving platform based on the forward position solution. Again, using the structural parameters given in section “Numerical simulations,” the working space can be obtained in MATLAB, as shown in Figure 15. In relation to multi-loop coupled mechanisms, to avoid inappropriate input variables, it is necessary to analyze variation in input variables. Similarly, the appropriate input variables can be obtained based on the forward position solution. Result is calculated in MATLAB and is shown in Figure 16. The working space is found to be similar to a triangular shape located on the XZ plane. In addition, the working space and range of input variables are relatively small. Therefore, further optimization is required and will form the basis of future work.

Working space.

Appropriate input variables.
Conclusion
A novel method is proposed for type synthesis of translational SMCMs with three branches and three coupled chains. The basic synthesis idea is based on replacing the input of one mechanism with the output of another, thereby combining several mechanisms. The type synthesis method is composed of a topology splitting method, a DoF splitting principle as well as type synthesis of every split part. Four topological layouts are obtained by separating the topology layout of the target mechanism based on the topology split method. And DoF of each topology layout is determined based on the DoF splitting principle. In this way, type synthesis of the target mechanism is transformed into type synthesis of a parallel mechanism, a serial mechanism, and two single closed loops. A novel class of translational SMCMs is obtained via combining the four satisfied parts. Of note, the motion of coupled nodes of this kind of mechanisms is also translational.
Following the synthesis, kinematic analysis of a proposed 1T mechanism is carried out, and the trajectory of the output platform, which is a general curve located on the symmetrical plane, is obtained. The results verify the effectiveness of the type synthesis method for the synthesized mechanisms and demonstrate prospective applications of the 1T mechanism. Subsequently, kinematics of a new 2T mechanism is theoretically analyzed, and a numerical simulation is also performed to verify the kinematics analysis. The working plane of the 2T mechanism is located on the symmetrical plane, and the range of the input joints is obtained as well. The contribution of this article is to explore and develop the SMCM, which enriches the theoretical reserves of this kind of mechanisms.
Footnotes
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant number: 51475015).