
Abstract
Oscillation of torque and speed occurs in the electric powertrain based on permanent magnet synchronous motor under field-oriented control when we set an unreasonable proportional control parameter of proportional–integral regulator. Thus, it influences the stability and reliability of electric powertrain. The objectives of this article are to study nonlinear dynamics of electric powertrain under various complex operating conditions and settle a minimum stable range of proportional control parameter of proportional–integral regulator. To achieve these goals, nonlinear dynamic model of electric powertrain was established. Then, we solved equilibrium points and analyzed the stability of equilibrium points. Finally, we set different control parameters of proportional–integral regulator and various complex working conditions of electric powertrain to simulate nonlinear dynamics of electric powertrain. The simulation results show the electric powertrain operates stably when the control parameter is set in the area where there is only one stable equilibrium point. Chaos do exist in the electric powertrain with field-oriented control under different working conditions. Our analysis reveals the dynamics of electric powertrain are dependent on proportional control parameters of proportional–integral regulator and electric powertrain performs unstably most likely under the operating condition with no-load and zero reference rotational speed.
Keywords
Introduction
In recent years, electrification has become a trend due to the depletion of fossil energy and the pressure of environmental protection. In the field of power transmission system, more and more attention has been paid to electric powertrain. Permanent magnet synchronous motor (PMSM) has been applied increasingly in electric powertrain for its simple structure, high efficiency and large power density. In many cases, FOC strategy is applied to regulate PMSM and proportional–integral (PI) regulator is used to control the speed and current of PMSM. The output voltage of PI controller is proportional to the input error between speed of PMSM and reference speed. However, instable behaviors such as oscillation of torque and speed, irregular current noise and so on occur in electric powertrain when the proportional control parameter is set unreasonably.
Chaotic motion, such as strong oscillation of speed and torque, influences the stable operation of PMSM. Li et al. 1 studied steady-state and dynamic characteristics of PMSM when subject to constant input voltage and constant external torque. Conditions were derived under which the dynamic characteristics of the system are either of steady-state type, limit cycles, or chaotic. Huang and Wu 2 analyzed the basic dynamics of PMSM by applying nonlinear dynamic theory such as Lyapunov exponents, bifurcation diagram, and phase diagram, and the mathematical model of PMSM has been confirmed to exhibit prominent chaotic characteristics under certain parameters and working conditions. 3 Jing et al. 4 analyzed the dynamics of PMSM extended to the PMSM model with a non-smooth-air-gap and studied the stability, the number of equilibrium points, and the pitchfork and Hopf bifurcations. Analytical stability boundary were given by solving the local quadratic approximation of the two-dimensional (2D) stable manifold at an second-order saddle point.
Owing to chaos of PMSM under certain parameters or operating conditions, it is essential to study the method of suppressing chaos in electric powertrain based on PMSM. FOC is one of the widely used control methods. Considering that chaos of PMSM threatens the stability and reliability of electric powertrain, Huang and Xiao 5 applied a proportionally differential method to eliminate chaos in electric powertrain. The control method only controls a part of the subsystem. The results show that the method is insensitive to system parameters and has fast control speed. Zhang et al. 6 proposed a speed tracking control method for PMSM based on the nonlinear dynamics of PMSM. He designed a controller by adding an auxiliary state variable in the nonlinear dynamic model of PMSM and used the proportional integral control principle. The simulation results show that PI controller can realize the asymptotic tracking to the speed reference. Souhail et al. 7 studied the coexistence and bifurcation of dynamic equilibrium points of PMSM. The synchronization of chaos was dealt with using a PI controller. Wahid et al. 8 described certain dynamic responses of the PMSM under FOC with variation of a parameter. Equilibrium point coordinates were solved from the differential system equations and their stability can be showed from characteristic polynomial solutions. The multi-stability property was put into evidence by the identification of several attractors for the same motor. Control parameters were set differently for different initial conditions. Although we use PI controller to suppress instability of electric powertrain, electric powertrain exhibits chaotic characteristics when we set an unreasonable proportional control parameter of PI regulator. So it is essential to settle a stable range of control parameter for electric powertrain under various complex working conditions.
This article studied different nonlinear dynamics of electric powertrain with the variable proportional control parameter of PI regulator and determined a minimum stable range of proportional control parameter under various complex operating conditions. In this article, nonlinear dynamic model of electric powertrain based on PMSM under FOC was built. The model was transformed into a dimensionless one through coordinate and time-scale transformation. We applied nonlinear dynamics theory to study the bifurcation and chaos. The equilibrium points were solved and the stability of equilibrium points was analyzed. Hopf bifurcation under the variation of proportional control parameter leads to instable oscillation in electric powertrain. The stable regions under four typical operating conditions can be used for design and control purposes. The main contributions of this article are listed as follows:
The nonlinear dynamic model of electric powertrain based on PMSM under FOC was first established. We concentrate on the influence of control parameter on the nonlinear dynamic behaviors of electric powertrain, and the nonlinear dynamics theory was applied to determine the stability domain of electric powertrain under various operating conditions.
The nonlinear dynamics of electric powertrain with FOC under various operating conditions were analyzed to reveal the relationship between control parameter of PI regulator and stability of electric powertrain. A minimum stable range of proportional control parameter was settled for the stable operation of electric powertrain.
Nonlinear dynamic model of electric powertrain
PMSM
The d-axis inductance equals with q-axis inductance9–11 for the surface-mounted PMSM. The nonlinear dynamic equations of PMSM are given using

where
PMSM controller
The d-axis and q-axis stator current of PMSM can be controlled by

where
Nonlinear dynamic model of electric powertrain
A schematic representation of electric powertrain is shown in Figure 1. PMSM and mechanical load are connected by shaft. Motor speed is compared with reference speed
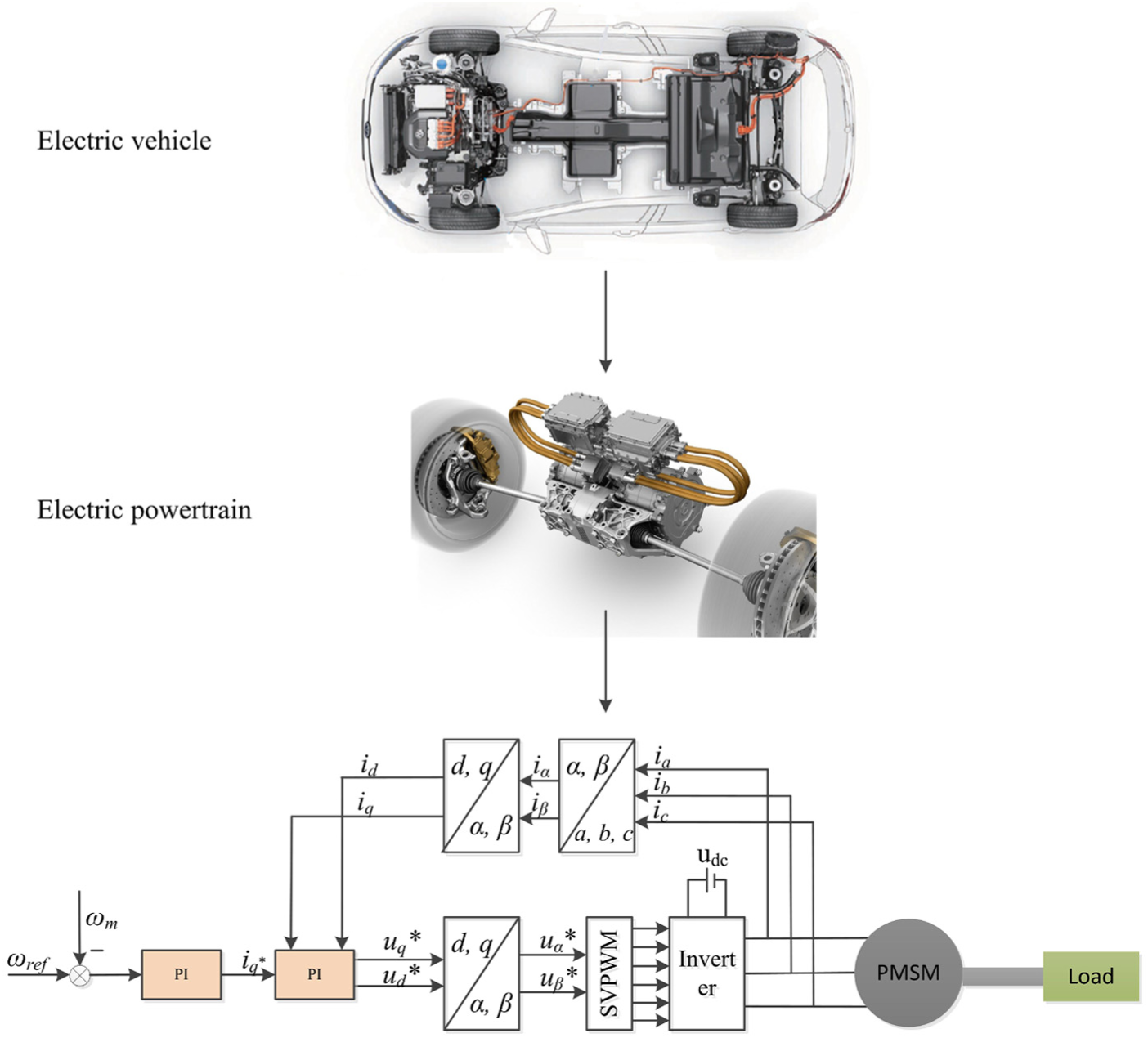
Schematic structure of the electric powertrain.
The proportional control parameter of PI regulator reflects the deviation signal of the control system. The large proportional control parameter can speed up the adjustment. However, when it increases to a certain degree, the electric powertrain becomes unstable. So, we set the integral control parameter
The dynamic model of electric powertrain under FOC is similar to the famous Lorenz equations. So, we can use nonlinear affine transformation and time-scale transformation to rewrite the dynamic model. The nonlinear affine transformation equation17,18 is given below

where
The time-scale transformation equation 19 is shown

where

The nonlinear dynamic model of electric powertrain under FOC after nonlinear affine and time-scale transformation is expressed as follows
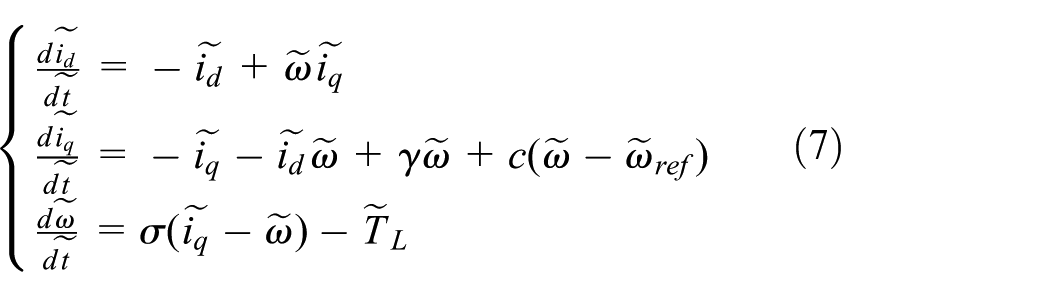
where
Determination methodology for stable control domain of electric powertrain
Stability analysis of equilibrium points
We note

The simplified balance equation is given as follows

The other two equations are
We note

The eigenvalue equation of matrix

The Routh–Hurwitz criterion 25 is used to judge the asymptotic stability of the electric powertrain under FOC at the equilibrium points. The stable conditions at the equilibrium points are expressed as shown

where
Theoretical determination of stable control domain
The equilibrium point will get unstable when the real part of eigenvalues transforms from negative to positive, and this transformation may cause Hopf bifurcation. Conditions that are subject to any minor disturbances will get away from the equilibrium point, but the disturbed movement may eventually become a steady state due to the nonlinearity in the system. The conditions that system produces Hopf bifurcation 26 are given as follows

where
If there is a non-zero pure imaginary eigenvalue

The conditions that system produces Hopf bifurcation are shown below

where
Some complex behaviors may happen when the Hopf bifurcations occur. Analysis of different dynamic behaviors of electric powertrain needs to recognize a particular set of bifurcation points. The transition from an equilibrium point to a limit cycle through a Hopf bifurcation leads to route to chaos. Lyapunov exponents are needed to calculate to confirm that chaos occurs. There is at least one index to be positive when chaos occurs. For the three-dimensional (3D) state space described by three first-order differential equations, the corresponding attractors (fixed point, limit cycle, quasi-periodic torus, and chaos) can be judged by the sign of Lyapunov exponent. The corresponding relationship is shown as follows: attractor type is fixed point if the symbol of the Lyapunov exponent is (–,–,–), attractor type is limit cycle if the symbol of the Lyapunov exponent is (0,–,–), attractor type is quasi-periodic torus if the symbol of the Lyapunov exponent is (0,0,–), and attractor type is chaos if the symbol of the Lyapunov exponent is (+,0,–).
Simulated results of stable control domain of electric powertrain
Under no-load operating condition
The reference speed ωref = 0
The parameters of PMSM are shown as follows: d-axis inductance is 14.25 mH, stator resistance is 0.9 Ω, pole-pairs is 1, permanent magnet flux is 0.031 Wb, polar moment of inertia is
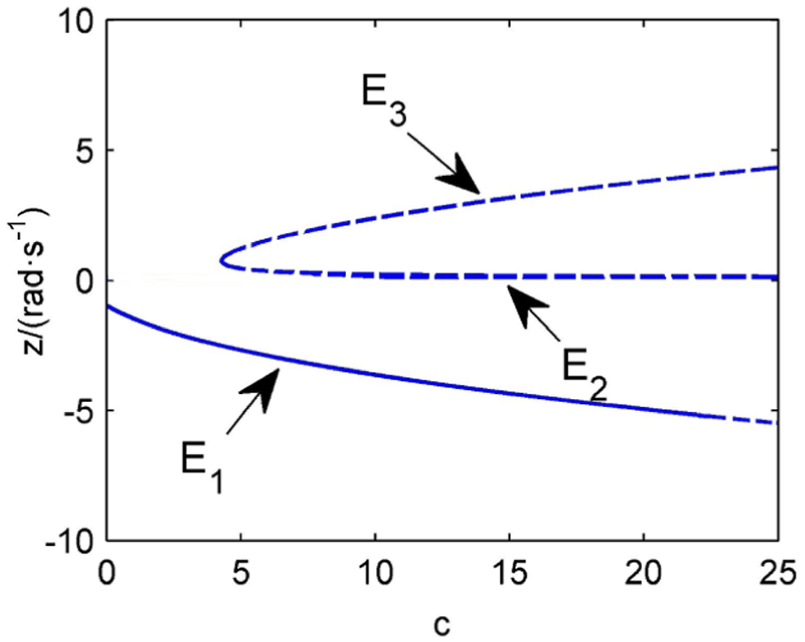
The equilibrium points are solved by work out the balance equation. The three equilibrium points are

The stabilities of the equilibrium points underno-load operating condition with
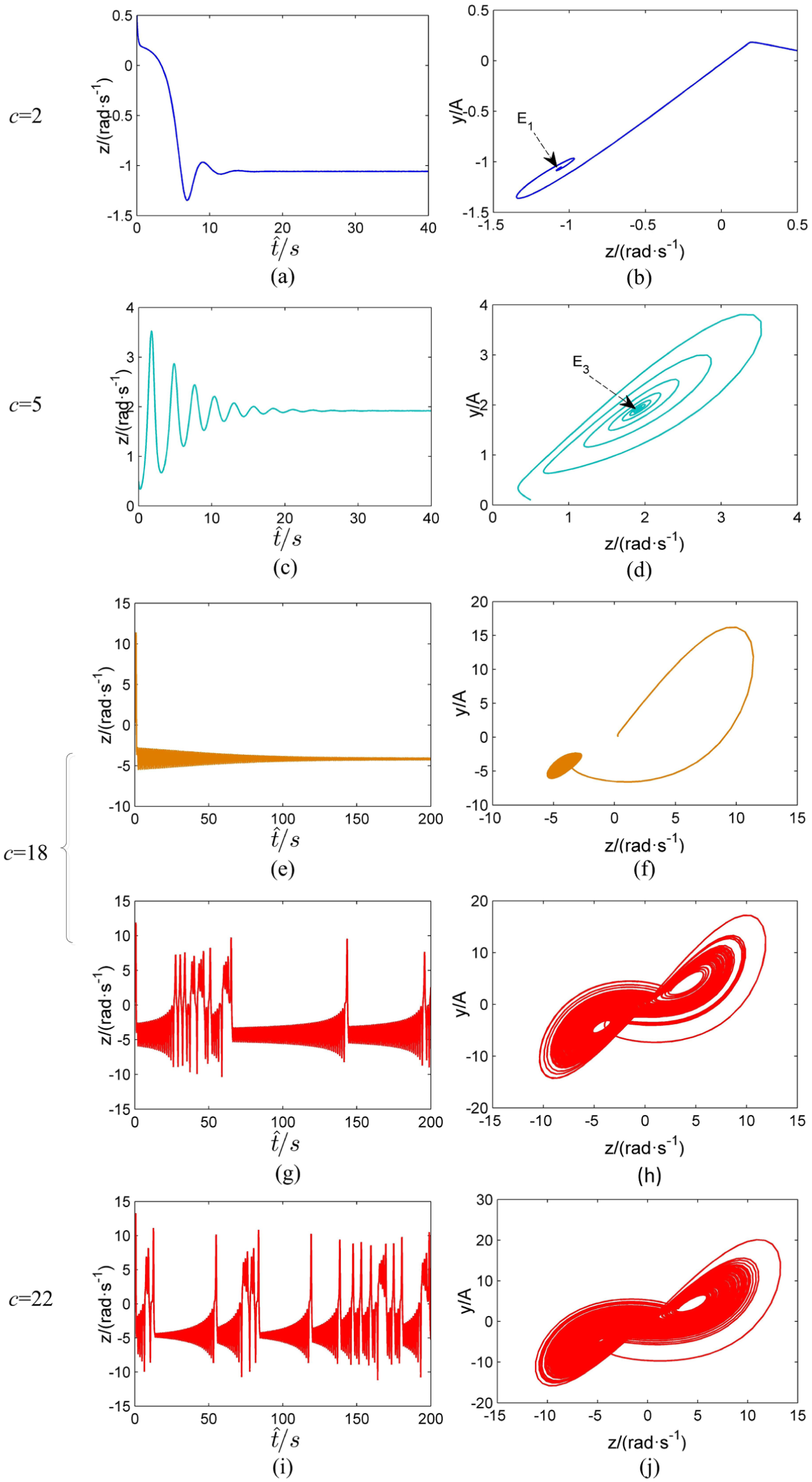
Time history diagrams and phase portraits obtained by simulation when

Time history and phase portraits for electric powertrain at different parameters
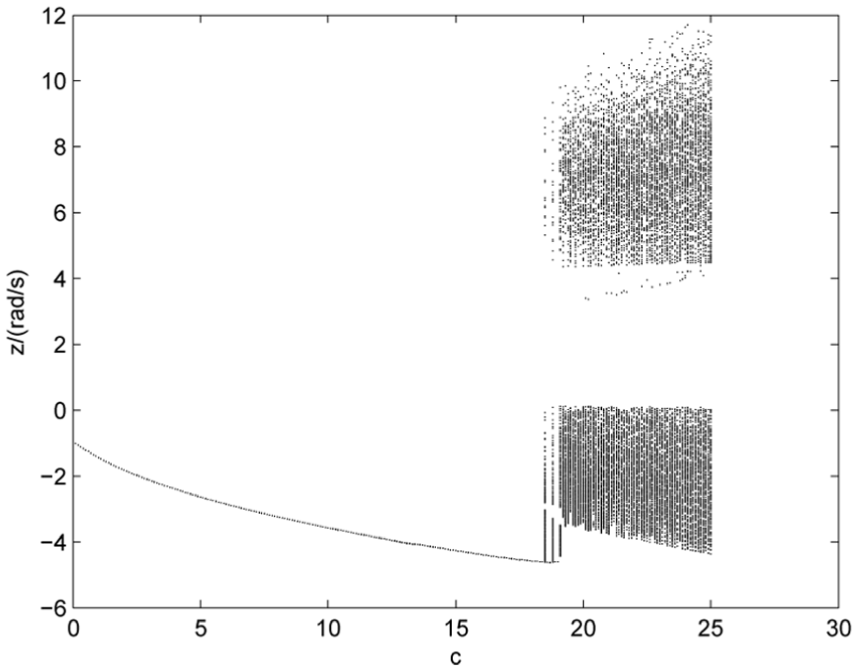
In order to study the global dynamic behavior of electric powertrain under FOC with the variation of parameter

The Poincaré bifurcation diagram under no-load operating condition with the reference speed
The reference speed ωref = 6 rad/s
The stabilities of equilibrium points of electric powertrain under no-load operating condition with

The stabilities of equilibrium points under no-load condition with
Time history diagrams and phase portraits obtained by simulation when
Time history and phase portraits for electric powertrain at different parameters
The Poincaré bifurcation diagram of the rotational speed of PMSM with variation of parameter

The Poincaré bifurcation diagram under no-load operating condition with the reference speed
Under non-zero load torque operating condition
The reference speed ωref = 0
The stabilities of equilibrium points of electric powertrain with

The stabilities of equilibrium points under non-zero load torque with

Time history and phase portraits for electric powertrain at different variables
The Poincaré bifurcation diagram of the rotational speed of PMSM with variation of parameter
The Poincaré bifurcation diagram under non-zero load torque operating condition with the reference speed
The reference speed ωref = 6 rad/s
The stabilities of equilibrium points of electric powertrain with
The stabilities of equilibrium points under non-zero load torque operating condition with
Time history diagram and phase portrait obtained by simulation when

Time history and phase portraits for electric powertrain at different parameters
The Poincaré bifurcation diagram with variable

The Poincaré bifurcation diagram under non-zero load torque operating condition with the reference speed
Discussion
In this article, we analyzed the relationship between nonlinear dynamics of electric powertrain and variable control parameter of PI under four typical operating conditions. A minimum stable range of proportional control parameter under various complex working conditions is solved.
The simulation results demonstrate that the dynamic behaviors of electric powertrain are dependent on the proportional control parameter. Chaotic motion, such as strong oscillation of speed and torque, arises when the proportional control parameter of PI regulator increases to a specific value. In contrast to other research, 5 which use proportional differential controller to eliminate chaos of PMSM under no-load and zero input voltage operating condition. A controller which uses the proportional integral control principle by adding an auxiliary state variable in the nonlinear dynamic model of PMSM was designed to suppression chaos and track speed. 6 But they don’t reveal the relationship between control parameter of PI regulator and stability of electric powertrain under various complex operating conditions. It is found that the impact of proportional control parameters on dynamic motion of electric powertrain can’t be underestimated.
In summary, we have shown different nonlinear dynamics of electric powertrain with variable parameter PI and give a stable region. This can be used for control and design purposes. But more work can be considered in the future, and more in-depth research can be done when there is more than one PI regulator applied to control speed and current.
Conclusion
The nonlinear dynamic model of the electric powertrain under FOC was established. By applying nonlinear dynamic theory, we analyzed the influence of proportional control parameter of PI regulator on the stability of electric powertrain under four typical operating conditions. The dynamic behaviors of electric powertrain are dependent on the proportional control parameters through the simulation results. Important conclusions are summarized as follows:
The electric powertrain operates stably when the proportional control parameter is set in the area where there is only one stable equilibrium point. The final running state of electric powertrain is affected by initial values when the proportional control parameter is chosen in two stable equilibrium points area. Local oscillation occurs during the early operating period. The electric powertrain can not operate stably when proportional control parameter is selected in the region without any stable equilibrium point;
Chaos occurs with the increase of proportional control parameter. Stable regions of electric powertrain diverse under different operating conditions. Especially the stable range of the area where there is only one stable equilibrium point under no-load and zero reference rotational speed is smallest. That is to say, the electric powertrain operates unstably most likely under no-load and zero reference rotational speed operating condition;
We can determine a minimum stable range of proportional control parameter under four typical operating conditions, the smallest stable region is
Footnotes
Handling Editor: Sung-Cheon Han
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51705208) and China Postdoctoral Science Foundation (grant no. 2018M632240).