
Abstract
In this article, our recent work on a kind of 2-degree-of-freedom lower-mobility parallel mechanism, which has one rotation degree of freedom and one translational degree of freedom, used in multilayer garage is presented. It has the following characteristics: lower-mobility, non-symmetric structure but can realize symmetric movement and a good compatibility for different kinds of lifting work. Kinematic performance should be considered in the first of designing a new kind of mechanism, the optimal kinematic design and analysis of this lower-mobility parallel mechanism are primarily investigated. In process of study, the global conditioning index over workspace is adopted, we establish a new evaluation method for the lower-mobility parallel mechanism, called global symmetry index and simulation results are shown. In addition, the flexible workspace of this lower-mobility parallel mechanism is also proposed. The evaluation index can be also applied on other lower-mobility parallel mechanism, which needs steady and symmetric movement.
Keywords
Introduction
The wide usage of parallel mechanism has proven to be a very helpful way to realize steady heavy load lifting, precise manipulation, good isotropy, quick response and obtaining high stiffness. Meanwhile, compared with 6-degree-of-freedom (DOF) parallel mechanism, lower-mobility parallel mechanisms (LMPMs) which have 2–5 DOF have their advantages, such as simpler structure, easy to be controlled, and in specific situation, it does not need that many DOFs. For such reasons, more and more types of 6-DOF parallel mechanism and LMPMs are proposed for scientific research and production instrument. 6-DOF Stewart platform, DELTA mechanism, 3-UPU (U-universal joint, P-prismatic joint) mechanism and many other LMPMs are very successful examples applied in practical production.1–5 However, optimal kinematic design for a good kinematic performance always comes first in mechanism design, and it is also one of the most challenging issues in the field. 6 The kinematic performance maps the transmission property between kinematics and dynamics from joints to workspace. Based on isotropy theory, Gosselin established a dimension parameter relationship for a planar 3-DOF parallel mechanism and a spherical 3-DOF parallel mechanism, respectively.7,8 Yoshikawa 9 used determinant of Jacobin matrix as the index and, thereby, obtained the best posture of a 4-DOF finger. Gosselin and Angeles 10 first proposed global conditioning index (GCI) to evaluate the kinematic performance of parallel mechanism. T Sun et al.11–15 utilized multi-objective optimization method and artificial intelligence approach obtaining the dimensional synthesis results which bring best evaluation index results to different kinds of parallel mechanism, virtual power transmissibility index, kinetostatic performance index, position-orientation coupling (POC) subsystem kinematic performance index and GCI are included. Velocity amplification factor (VAF) was studied by F Majou et al., 16 and got a better useful workspace and Cartesian workspace of 2-DOF parallel mechanism. Meanwhile, Cinquemani et al. 17 and G Legnani and collegues18,19 studied the isotropy of different parallel mechanisms and proposed concept of ‘point of isotropy’ both for serial and parallel mechanism. Many indexes are proposed, such as transmission factor, generalized transmission index that can evaluate the motion/force transmissibility, local transmission index and homogeneously dimensionless local and global transmission indices.20–24 Although different kinds of indexes are presented for parallel mechanism, an index which can reflect the degree of symmetry of kinematic performance of parallel mechanism is not presented. In this article, we propose an index called global symmetry index (GSI) to reflect the degree of symmetry of kinematic performance.
In this article, a kind of 2-DOF LMPM designed for multilayer garage is studied. This mechanism has two DOFs, one rotation DOF about the X axis of the global coordinate system and one translational DOF along the Z axis of the global coordinate system. LMPM is a very useful alternative to the multilayer garage. The main reason is that it can provide a reasonable rising movement range by the translational DOF and an initiative posture control by the rotation DOF to guarantee smooth and steady lifting work in multilayer garage. Multilayer garage is a helpful equipment to increase the amount of parking lot and improve people’s daily life. Take China as example, large population results in a large car ownership and the parking problem keeps growing every day. Different kinds of multilayer garage and mechanisms are proposed, such as up-down and translation equipment, vertical circulation equipment and laneway stacker.25,26 These equipment are applied in many places, but there exists a big obstacle for further development, the safety problem. Domestic vehicles are expensive goods for people; however, many news about multilayer garage accidents are reported.27,28 We apply parallel mechanism in multilayer garage, which can exert the advantages of parallel mechanism to improve the safety of multilayer garage.
In the following sections, kinematic analysis of the LMPM is presented in section ‘Kinematic analysis of 2-DOF LMPM’, where kinematic design, mobility analysis, forward kinematics analysis and inverse kinematics analysis are included. In section ‘Singularity and workspace analysis’, the singularity and workspace are studied, including the definition of flexible workspace of LMPM. In section ‘Kinematic performance evaluation using GSI’, GSI is proposed, which can reflect the symmetry of kinematic performance of LMPM and also can be used on other LMPMs that need steady and symmetric movement. In section ‘Prototype experiment’, we make a prototype which demonstrates that this kind of LMPM can be used for heavy load lifting.
Kinematic analysis of 2-DOF LMPM
Layout and mobility analysis of LMPM
In this section, kinematic analysis of LMPM is presented. Figure 1 shows the geometrical layout of LMPM.

2-DOF lower-mobility parallel mechanism: (a) render graph of LMPM and (b) layout of LMPM.
The LMPM consists of a moving platform, whose width is
For LMPM is first proposed, so the mobility analysis is necessary. The LMPM can be simplified as shown in Figure 2. The number of component is expressed in Arabic numerals and the joint number is expressed in Roman numerals. The simplified configuration has eight components and 11 joints, according to the calculation formula of freedom of planar mechanism,
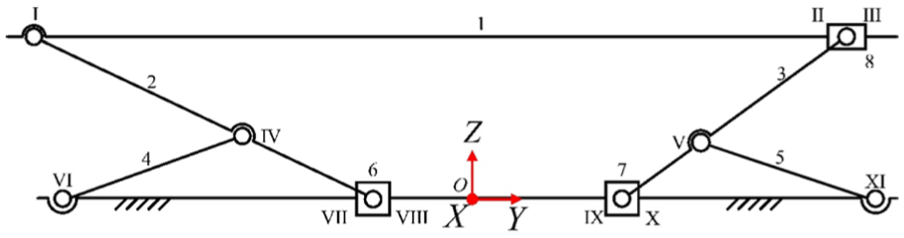
Simplified configuration of LMPM.
The LMPM is symmetrical about the YOZ plane. Based on above mobility analysis, the outputs of
Inverse kinematics analysis
For parallel mechanism, the inverse kinematics problem is easier to solve than the forward kinematics problem. Inverse kinematics analysis can be concluded as, knowing the position vector of moving platform and the dimension parameters to solve the output of the driving unit.29,30
For LMPM, the position vector

where


and

When
Relationship of output speed and input speed between the moving platform and driving unit is also about inverse kinematic analysis. Closed vector method is used to solve the problem

where

where
Forward kinematics analysis
For LMPM, its forward kinematics analysis reflects the relationship of input from
Take driving unit

where

then according to the geometrical relationship, the position vector of

where


then

and

Singularity and workspace analysis
Singularity analysis
When parallel mechanism is at singularity configuration, it will lose DOF and results in mechanism being out of control. Therefore, the singularity configuration should be considered in designing process and avoided in practical application. Combining with above analysis and using Jacobin matrix method, we study the singularity of LMPM. According to the layout of LMPM, it can be easily seen that it needs the output of
LMPM is symmetrical about YOZ plane, we take the part of

The determinant of

When the determinant
Workspace analysis
Different from workspace analysis of other parallel mechanism, they consider all positions that the moving platform can reach as the workspace of parallel mechanism.
31
LMPM is designed for lifting vehicle in multilayer garage, we pay attention on the smooth and steady operation, therefore relationship between the centroid of the moving platform and the centroid of the vehicle should be controlled. For this reason, the workspace of LMPM is defined as all of the points that centroid of the moving platform
First, we assign certain values to the components of LMPM. Maximum value of driving units
In Figure 3, it shows that the workspace of LMPM generated by 16 iterations, namely 256 points totally. It can be seen that the points that centroid
On X axis, the centroid does not move;
On Y axis, the centroid moves only in the negative direction, maximum value is 0 mm and minimum value is −170.4 mm;
On Z axis, the centroid moves only in the positive direction, maximum value is 2000 mm and minimum value is 227 mm.

Workspace of LMPM generated by 16 iterations.
Limited by iteration times, the points showed in Figure 3 appear sparse, so we increase iteration times to 31 and 39, respectively, as shown in Figures 4 and 5. It can be seen that the workspace generated by 39 iterations is more intensive. Meanwhile, most of the new appeared points locate at the right side of the workspace, and according to this phenomenon, we propose the following Table 1.

Workspace of LMPM generated by 31 iterations.

Workspace of LMPM generated by 39 iterations.
Distribution of points that

In Table 1, following aspects can be obtained, in the range from −20 to 0, the points locate in this range occupy more than 60% of the total points, and the proportion of points that locate in each specified range almost keeps invariant, and the proportion in each range decrease progressively from ‘–10 to 0’ to ‘–180 to −170’. It illustrates that the LMPM has a more flexible attitude adjustment selection in the range −20 to 0. Therefore, we divide the workspace of LMPM along Y axis direction into several subareas by 10 mm. From 0 to −180, there are 18 subareas, and we define the two subareas that contain the largest proportion of workspace points as the flexible workspace of LMPM. Taking the above dimension parameters as example, the range X = 0, −20 < Y < 0, 0 < Z < 2200, is the flexible workspace of LMPM. This flexible workspace reflects that LMPM has more attitude adjustment selections and more smooth movement in these subareas. Moreover, the flexible workspace represents that the LMPM can realize fine and continuous posture adjustment in a small range, and it just meets the requirement that it does not need the instrument to make remarkable adjustment in multilayer garage.
In addition, once the dimension parameter is changed, the workspace and flexible workspace will change too. The change of flexible workspace will be illustrated in the following section.
Kinematic performance evaluation using GSI
In this section, according to the characteristics of LMPM, we propose a GSI based on the GCI to evaluate the kinematic performance of LMPM, and it can reflect the kinematic performance of the mechanism designed for realizing symmetry movement but driven by mutual independent units. The flexible workspace is also studied combined with the GCI. In the end, we developed a simulation software based on MATLAB guide, which can intuitively show the kinematic performance of LMPM.
Based on the condition number
To obtain a good kinematic performance, dimension parameter of LMPM should be adjusted. The dimension parameters in section ‘Workspace analysis’ are unchanged, except
In Figures 6–9, X label represents iterations of driving unit

Condition number distribution:

Condition number distribution:

Condition number distribution:

Condition number distribution:
Characteristics of condition number distribution with different

Degree of symmetry of the condition number distribution in workspace should be concerned in LMPM’s kinematic performance evaluation. LMPM is designed for realizing steady lifting and posture adjustment, so it is expected that the driving units
GSI is defined based on GCI. The condition number distribution K is

We denote

where u = 1, 2,…, n and v = 1, 2,…, n.
The value of
In order to intuitively illustrate the symmetry degree of kinematic performance of LMPM,

Symmetry degree of kinematic performance when
In the vicinity of
Characteristics of distribution of

In section ‘Singularity and workspace analysis’, the flexible workspace of LMPM is defined. Along with the change of dimension parameters, the workspace and flexible workspace are also changed, in the following table, the related characteristics are illustrated.
In Table 4,
Characteristics of flexible workspace with different

Based on the above analysis, we developed a simulation software based on MATLAB guide to show the kinematic performance of LMPM intuitively, as shown in Figure 11. In the software, we can change the dimension parameter and choose different kinematic performance index to see the differences of each index under different dimension parameters.

Kinematic performance simulation software of LMPM.
Prototype experiment
Combining the above study about the 2-DOF LMPM applied in multilayer garage, we made a prototype to verify the feasibility of this project.
The battery pack consists of six lead storage batteries in series connection, its nominal voltage is 12 V and it powers the LMPM. The DC motor, whose power is 2 KW, pumps oil from an 8 L hydraulic oil tank through switch valves to the driving units. Figure 12(a) shows LMPM located in prone position, Figure 12(b) shows LMPM in rising process and Figure 12(c) shows LMPM lifting the carrying board whose mass is about 300 kg. Proof by facts, the design project is reasonable and feasible.

Prototype of LMPM: (a) prone position, (b) rising process, and (c) lifting carrying board.
Conclusion
In this article, we have shown our study and research about a new kind of lifting instrument applied in multilayer garage. The kinematic analysis and kinematic performance evaluation are presented, the unique kinematic characteristics of LMPM have been obtained meanwhile we establish two kinds of evaluation standard: flexible workspace and GCI; which can also be applied in kinematic analysis of mechanisms like LMPM which is expected to realize steady and symmetry movement. In kinematic level, we have established a good model for this kind of mechanism.
In future work, to get a better stability and symmetrical movement, following aspect will be studied: the influence that existing clearances in the joint brings to LMPM. Clearances in mechanism are unavoidable due to assemblage, manufacturing errors and wear. Moreover, the clearance occurs in each joint with the movement of the mechanism. The mechanism takes risk of losing movement accuracy, stability and the reliability. Meanwhile kinetostatic optimization should also be taken into consideration, combining dynamic analysis and kinetostatic analysis, the reliability, economical and practical factors are satisfied as well as the LMPM can get a good dynamic response.
Footnotes
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the Heilongjiang Province Education Department aids project, Study of Omni-bearing Transporting Robot used in Intelligent Multilayer Garage (GC13A410).