
Abstract
A reduced-order approach to the adaptive fuzzy sliding mode control of the constrained manipulator is proposed. Based on the Udwadia–Kalaba motion constraint equation, the dynamic equation of the constrained manipulator with both ideal and non-ideal constraints is obtained. Considering the uncertainty of the terminal non-ideal constrained force and the chattering phenomenon of sliding mode control, the adaptive fuzzy and the sliding mode control method are combined to control the constrained manipulator. Because the system is constrained, the model order reduction method is innovatively used in the control algorithm. The stability of the system is proved by Lyapunov theorem. For demonstrating the effectiveness of the control algorithm, the 2-degree-of-freedom manipulator is taken as the research object. Finally, the high-precision control of the manipulator is achieved and the chattering phenomenon caused by the sliding mode control is weakened.
Keywords
Introduction
In the actual work, the terminal of the manipulator is generally subjected to various constrained forces. In the constrained condition, there will be two kinds of forces acting at the manipulator, which are named as the ideal and the non-ideal constrained forces. According to the D’Alember’s principle, constraint forces can do positive, negative, or zero work under virtual displacement in the constrained condition. When constrained forces do no work, it is called ideal constrained force. While constrained forces do work, constraint forces can be named as the non-ideal constraint force. In 1992, Udwadia and colleagues,1–4 professors at the University of Southern California, proposed an equation of motion for a multi-body mechanical system under constraint conditions, which is called the U-K equation. This equation has enjoyed great achievements in the field of Lagrange 5 mechanics. The U-K equation is applicable to the constraint system under various conditions, including ideal and non-ideal constraints. Because the non-ideal constraint does not satisfy D’Alembert’s principle, 6 they generalized the U-K equation to general motion equations, which promote the equation is not limited to D’Alembert’s principle.
In recent years, The U-K equation has got more and more attentions and applications. A large number of scholars have used U-K equations to research the dynamic modeling and control of constrained robots. Liu and Liu 7 obtained the dynamic modeling of a constrained industrial robot in the basis of the U-K equation. Huang et al. 8 used this equation to establish a dynamic model of a parallel robot. But so far, all studies based on the U-K equation have only considered the ideal constrained force, which are one-sided in the analysis of constrained forces. Although the analytical expression of constrained forces can be obtained by the U-K equation, the non-ideal constrained force still changes with time and environment, and has the characteristic of high nonlinearity and uncertainty, which make its application limited in practice. In this article, the adaptive fuzzy control method and the sliding mode control method are combined to control the non-ideal constrained force. Benefiting for the characteristic of the fuzzy control with universal approximation, the unknown non-ideal constrained force of the constrained manipulator can be approximated and compensated.
As we all known, the manipulator is an extremely complex multi-input and multi-output nonlinear system. The manipulator control methods mainly include proportional–integral–derivative (PID) control, adaptive control, neural network control, fuzzy control, iterative learning control, conventional backstepping, and sliding mode control. The PID control 9 is simple and easy to implement, but it is difficult to guarantee the control accuracy of the nonlinear system, and the demand of control energy is very large. The adaptive control 10 can modify its own parameters in time to adapt to external disturbances and changes in control objects. When there are many uncertainties, the stability and high quality of the adaptive control cannot be guaranteed. The neural network control and fuzzy control 11 can realize the accurate approximation of the unknown part in the robot dynamics equation, so as to realize the high-precision tracking of the robot. The iterative learning control 12 does not depend on the precise mathematical model of the system and the algorithm is simple. The conventional backstepping 13 can decompose the complex robot system into subsystems that do not exceed the order number of the system, thus the system’s non-matching uncertainty can be solved.
The sliding mode control, 14 also known as the variable structure control, was proposed by Soviet scholars Utkin and Emeleyanov. By designing the hyper planes in the control process, when there are errors and disturbances in the system, the sliding mode controller constantly switches its states so that all uncertainties can reach to the hyper plane to ensure the stability of the control system. 15 The sliding mode control of the manipulator has several advantages: (1) when designing the sliding mode control system, it is not necessary to establish an accurate mathematical model for the system as well as parameter perturbations and external disturbances. Generally, knowing of their changes can provide accurate trajectory tracking control of the manipulator system. (2) When the sliding mode control system is designed, there is no need to specifically decouple the system’s internal coupling. When designing a multi-input and multi-output manipulator control system, the independent system can be designed separately. (3) The manipulator sliding mode control system has strong robustness to uncertainties, parameter perturbation and external disturbance. (4) The sliding mode control of the manipulator system has the characteristics of fast response, no overshoot, small calculation, and simple physical implementation.
The sliding mode control will cause chattering of the system due to its inherently discontinuous switching characteristics. When the system trajectory reaches to the switching surface, its speed is limited and the movement point can pass through the switching surface, which formats the chattering caused by the inertia. The main factors that cause chattering are the time lag switch, the space lag switch, and the inertia of the system. Chattering has a strong hazard to the electromechanical system of the manipulator, which affects the accuracy of the system control and consumes more energy of the system. Therefore, eliminating the influence of chattering is imperative for the control of the manipulator.
Many scholars have done a lot of researches on the problem of anti-chattering in the sliding mode control. Different solutions have been proposed from different perspectives, including filter method, observer method, switching gain method, fuzzy method, neural network method, and genetic algorithm. In Xu et al., 16 a low-pass filter is used to obtain the gain of the switching term for the control problem of multi-joint robotic systems, and another low-pass filter is used to obtain the control law. The effect gain control item effectively suppresses chattering. Cui et al. 17 used the adaptive gain update algorithm to estimate the upper bound of the uncertainties, which is based on the sliding mode control. Han and Liu 18 proposed a continuous higher-order sliding mode control scheme with time-varying gain for a class of uncertain nonlinear systems, which can reduce the chattering. In Soltanpour et al., 19 in order to remove the undesirable chattering phenomenon, an adaptive fuzzy approximator is designed to approximate the maximum boundary of the remaining uncertainties.
In this article, due to the uncertainty of the terminal non-ideal constrained force and the chattering phenomenon of sliding mode control, the adaptive fuzzy and the sliding mode control method are combined to control the constrained manipulator.
The fuzzy control is derived from the fuzzy theory, which is benefiting from the control experience of the operator or expert to control the object.20,21 The combination of the fuzzy control and the sliding mode control can realize complementary advantages. This combination is manifested in two aspects. On one hand, the fuzzy controller is used to reduce the chattering of the sliding mode control. Based on experience, fuzzy rules are designed to reduce chattering and soften the control signal to achieve the attenuation of the chattering phenomenon. On the other hand, the fuzzy system approximate to the unknown forces in the sliding mode control, which can achieve the adaptive sliding mode control without modeling. In Veysi et al., 22 an optimal fuzzy sliding mode controller has been designed for controlling the end-effector position in the task space. In Modi et al., 23 an adaptive fuzzy sliding mode controller is designed to control the position tracking of robot manipulator.
The rest of this article is organized in the following. First, the Udwadia–Kalaba approach is described in detail. Second, the dynamic model is order-reduced and the adaptive fuzzy sliding mode control algorithm is derived. Third, to specify and verify the correctness of the control algorithm, the 2-degree-of-freedom (2-DOF) robot with vertical constraint is used as the example. Finally, some conclusions are presented.
Detail the Udwadia–Kalaba approach
For the multi-body system without constraint, the dynamic equation 24 of n-DOF system is described as

where

where

The manipulator is subjected to

We shall assume

Now, take time derivative twice on equation (4) and take time derivative once on equation (5), the constraints equations can be obtain in the following form 25

where A referred to as

where
On the basis of the D’Alembert’s principle, Udwadia and Kalaba extend to the non-ideal constraint. The virtual work done by the ideal constrained force is zero, and the virtual work of the non-ideal constrained force is not zero. In this article, the non-ideal constrained force is the friction acted in the manipulator. So, the

where

and

where

Model reduction
In order to verify the validity of the proposed dynamic equations and control algorithms, this article only focuses on the modeling and simulation of the 2-DOF manipulator, which is shown in Figure 1.

2-DOF robot with vertical constraint.
As shown in Figure 1, it is the case that the terminal of the manipulator is subjected to the vertical plane. The manipulator can move linearly along the vertical surface. The coordinate in the Cartesian coordinate system of the manipulator terminal is expressed as

In equation (12), the function

In equation (13), the function

Since the terminal of the manipulator is constrained, the number of degrees is reduced. When the number of degrees is not equal to the number of dynamic equations, some dynamic parameters are unknown. To solve this problem, this article adopts the geometric method to reduce the dynamic equation to achieve the solution of the dynamic equation. This method has universality and can be extended to n-DOF manipulator or other constrained mechanical systems. Choose

After determining the first-order and second-order derivations of equation (15), the following equation is obtained

and

where

According to the functional relationship between

where

The design of the fuzzy controller
The following is the fuzzy controller design for the constrained manipulator system, which is mainly divided into four steps:
Selection of the fuzzy controller.
There are three kinds of fuzzy controllers: single-valued fuzzy, Gaussian fuzzy, and triangle fuzzy. Gaussian fuzzy controller can improve the precision and efficiency of control. In this article, Gaussian fuzzy is used for constrained manipulator, and its membership function can be expressed as

where
Representation of the fuzzy rule library.
When

where Rule 1: IF Rule 2: IF Rule 3: IF Rule 4: IF Rule 5: IF 3. Fuzzy inference machine.
The commonly used inference machines are product inference machine, minimum inference machine, Lukasiewicz inference machine, and Dienes–Rescher inference machine. Considering that the product inference machine has the advantages of small computation and intuitive calculation, the product inference machine used in the article is donated as

where

where
4. The solution of the fuzzy device.
The solution of the fuzzy device is to convert the fuzzy output to the accurate output. At present, the solution of the fuzzy machine mainly contains the center average solution and the maximum solution. In view of the calculation and simplicity, the solution of the central average fuzzy machine is used in the article, and the accurate output of the system is shown as

where
The above fuzzy system can approximate any continuous function with high precision. The adaptive fuzzy sliding mode control is adopted to approximate and compensate the non-ideal constrained force in this article.
Adaptive fuzzy sliding mode control for constrained robot
In this part, the control algorithm of the adaptive fuzzy sliding mode control is proposed. In the constrained manipulator system, the non-ideal constrained
The sliding surface is selected as the hyper plane when

where

From above equations,

The left and right of equation (26) are all multiplied by

Before accurately obtaining the adaptive fuzzy sliding mode control law, take the Lyapunov function as

where

where
Use functions

where

The function

Substituting equation (29) into equation (30), the following is obtained

where

Substituting equation (34) into equation (33)

In equation (35), when
Simulated example
According to the dynamic equation of the manipulator established, the detailed matrix representations 27 of the 2-DOF constrained manipulator in Figure 1 are shown in the following



where

On the basis of the geometric relationship between two joints in Figure 1, the Cartesian coordinates

Considering that the terminal of the manipulator is constrained on the vertical plane, the coordinate exits the following relationship

Equation (41) is taken quadratic derivation by time to obtain the following equation

Take quadratic derivation of equation (40) by time, it is obtained

In equation (43), the concrete expressions of the three unknown parameters are shown as follows

Put equation (43) into equation (42) and the expression can be written as

In the above equation, the expressions of

The expressions of

In the simulation, the physical parameters of the manipulator are set as

Considering the manipulator is constrained on the vertical surface, so

Now, the relation between

Due to equation

Take the 2-DOF constrained manipulator in Figure 1 as the simulation object. Due to the input of

Gauss membership function.
The reduced-order dynamic equation (18) is used as the control target. The initial position function of joint 1 is selected as

The control scheme of the control system.
The angles and angular velocities tracking and tracking errors of the two joints are shown in Figures 4–7.

The angle and angular velocities tracking of the first link.

The angle and angular velocities tracking of the second link.

Tracking errors of the first link.
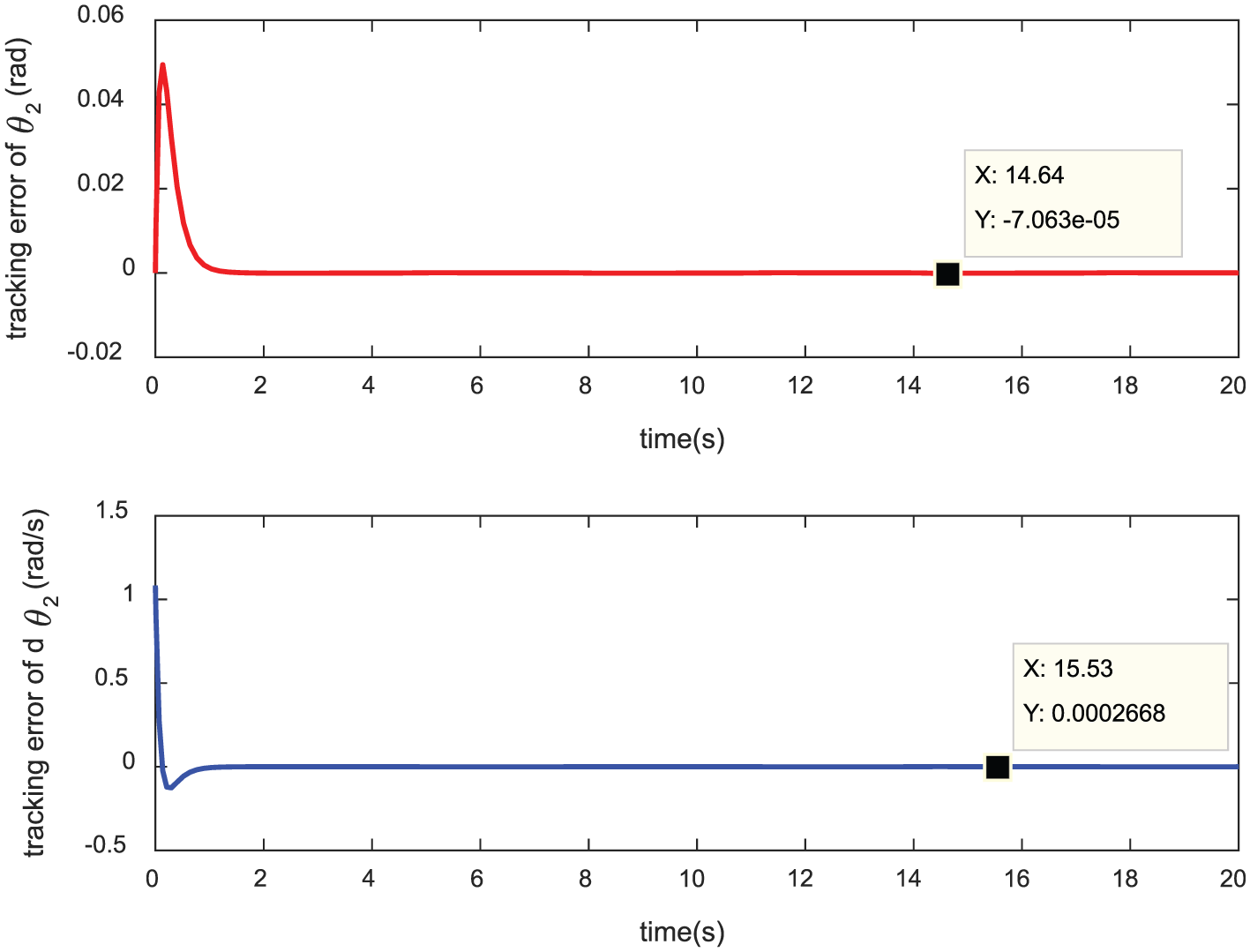
Tracking errors of the second link.
Figures 4 and 5 are the angular position and velocity tracking of the constrained manipulator. The solid red lines in the figure represent the ideal angular position and velocity given by each joint, and the dashed blue lines express the actual tracking angle and angular velocity. It can be seen that the tracking curves and the ideal lines are almost coincident, and the relationship between the angular variables satisfies
Figures 6 and 7 are the angular position and velocity tracking error of the constrained manipulator. In the stable phase, the maximum value of the angular tracking errors are
Figure 8 shows the control torques of the constraint manipulator, in which the red line expresses the control torque of the first link, and the blue line represents the torque of the second link. By designing suitable fuzzy rules and adaptive fuzzy sliding mode control algorithm, the chattering phenomenon of the control system is effectively reduced.
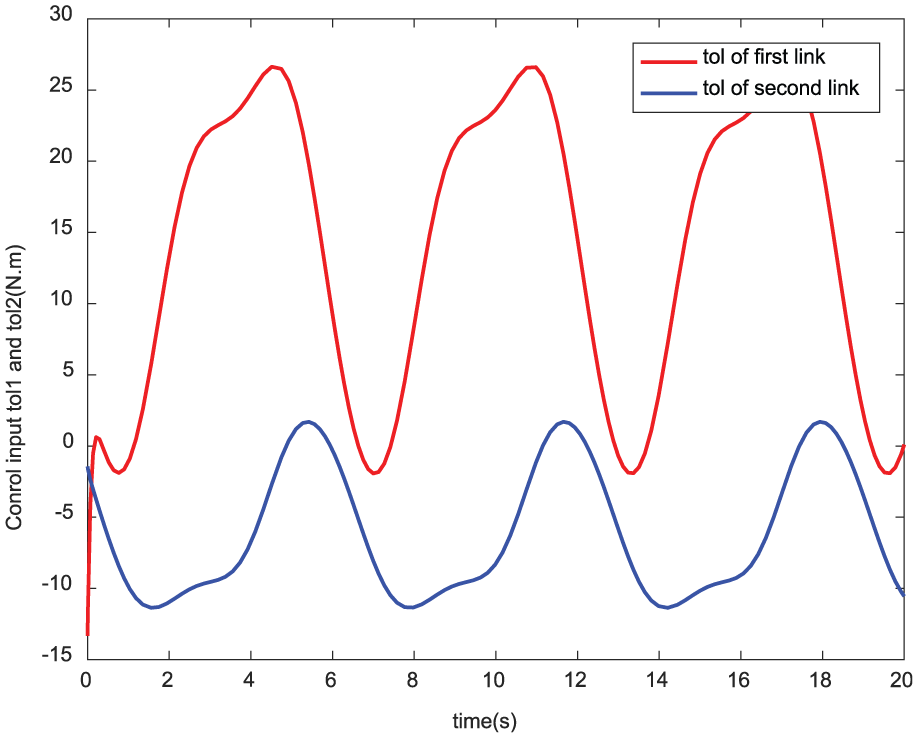
The control torques of the constrained manipulator.
The tracking and tracking error of the non-ideal constrained force
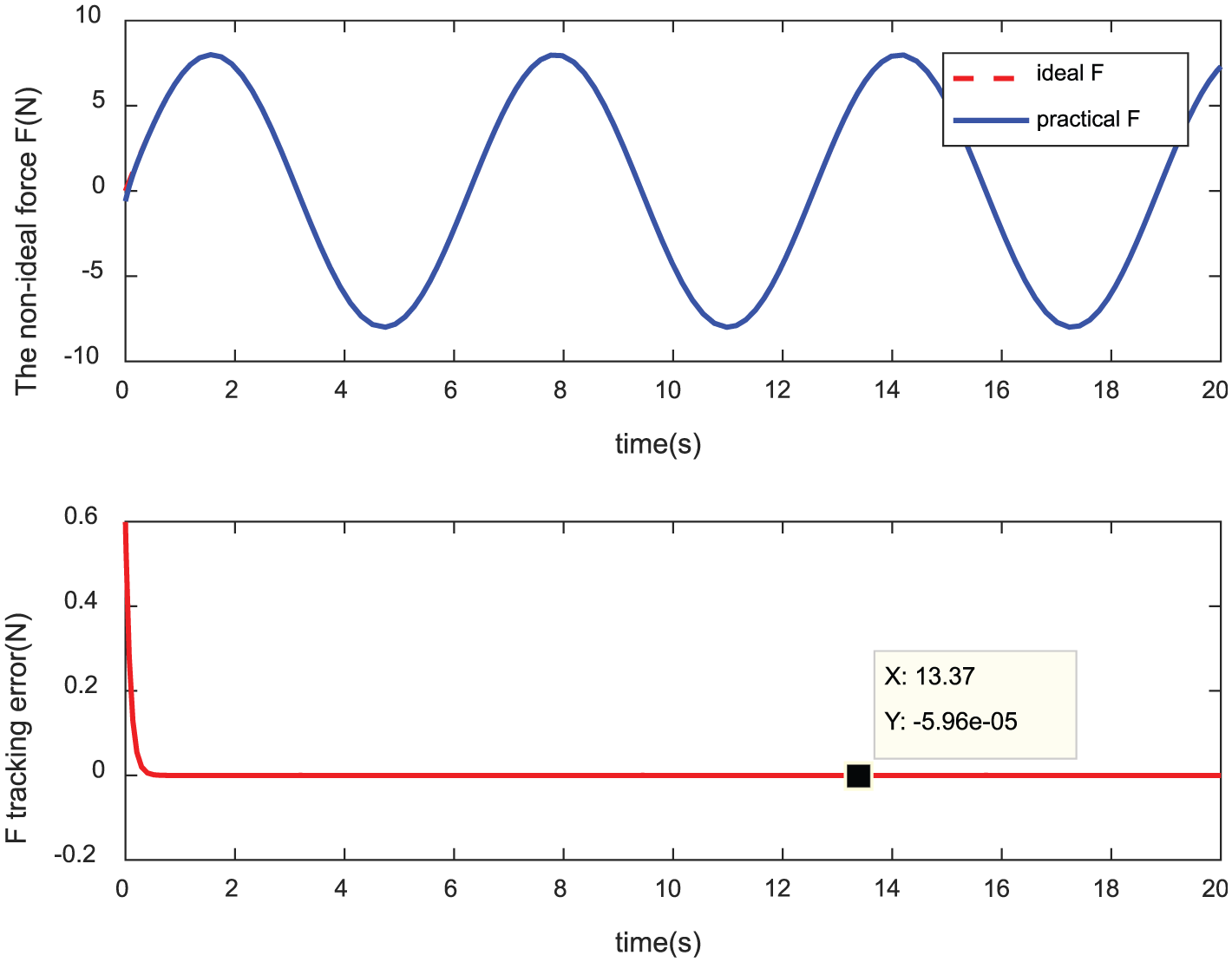
The tracking and tracking error of the non-ideal constrained force.
In Figure 9, the dashed red line represents the given ideal value
According to the simulation, the tracking errors of angle variables, angular velocity, and the non-ideal binding force are shown in Table 1.
The maximum tracking error of the constrained manipulator.

The above simulation results show that the adaptive fuzzy sliding mode control method realizes the high-precision control of the constrained manipulator, and the tracking errors of angle variables, angular velocity, and the non-ideal binding force are equal to zero.
Conclusion
In this article, a reduced-order approach to the adaptive fuzzy sliding mode control of the constrained manipulator is proposed. The stability of the system is proved by Lyapunov theorem. For demonstrating the effectiveness of the control algorithm, the 2-DOF manipulator is taken as the research object. From the simulation results, the tracking errors of angle variables, angular velocity, and the non-ideal binding force are equal to zero, and the high-precision control of the manipulator is achieved and the chattering phenomenon caused by the sliding mode control is weakened. At present, the experimental platform of the manipulator has been set up, and some equipment is still in preparation. The subsequent experiments will be carried out to verify the effectiveness and correctness of the proposed control algorithm. The contribution of this article is shown and highlight in the following
Based on the Udwadia–Kalaba motion constraint equation, the dynamic equation of the constrained manipulator with both ideal and non-ideal constraints is obtained. Considering the uncertainty of the terminal non-ideal constrained force and the chattering phenomenon of sliding mode control, the adaptive fuzzy and the sliding mode control method are combined to control the constrained manipulator.
Because the system is constrained, the model order reduction method is innovatively used in the control algorithm. The order reduction method is generic and can be generalized to multi-DOF manipulator or mechanical system.
Footnotes
Handling Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.