
Abstract
The availability of advanced receiver autonomous integrity monitoring for vertical guidance down to altitudes of 200 ft (LPV-200) is discussed using real satellite orbit/ephemeris data collected at eight international global navigation satellite system service stations across China. Analyses were conducted for the availability of multi-constellation advanced receiver autonomous integrity monitoring and multi-fault advanced receiver autonomous integrity monitoring, and the sensitivity of availability in response to changes in error model parameters (i.e. user range accuracy, user range error, Bias-Nom and Bias-Max) was used to compute the vertical protection level. The results demonstrated that advanced receiver autonomous integrity monitoring availability based on multiple constellations met the requirements of LPV-200 despite multiple-fault detections that reduced the availability of the advanced receiver autonomous integrity monitoring algorithm; the advanced receiver autonomous integrity monitoring availability thresholds of the user range error and Bias-Nom used for accuracy were more relevant to geographic information than the user range accuracy and Bias-Max used for integrity at the eight international global navigation satellite system service stations. Finally, the possibility of using the advanced receiver autonomous integrity monitoring algorithm for a Category III navigation standard is discussed using two sets of predicted errors, revealing that the algorithm could be used in 79% of China.
Keywords
Introduction
It is necessary for Global Navigation Satellite Systems (GNSSs) to provide timely warnings to aircraft when the GNSS is unsuitable for vertical guidance down to altitudes of 200 ft. There is a strong interest in expanding the role of receiver autonomous integrity monitoring (RAIM) in vertical navigation. In 2008, a report 1 from the GNSS Evolutionary Architecture Study (GEAS) group formed by the Federal Aviation Administration (FAA) presented an advanced receiver autonomous integrity monitoring (ARAIM) algorithm based on the solution separation method 2 for localized performance in vertical guidance down to altitudes of 200 ft (LPV-200). In 2010, report II 3 from the FAA analysed the availability of ARAIM around the world using simulation data. The results showed that the position accuracy and satellite geometry of the global positioning system (GPS) were unable to meet the availability requirement (99.5%) around the world. The combination of multiple constellations is an interesting approach to improving ARAIM availability at this stage. Multiple-constellation ARAIM4–6 has thus become a focus of research. Methods for improving ARAIM availability have been presented for the integration of GPS with GLObal NAvigation Satellite System (GLONASS)7,8 or the BeiDou Navigation Satellite System (BDS). 9 Moreover, with the United States–European Union Agreement on GPS–Galileo Cooperation signed in 2004, there is the prospect of integrating the GPS with Galileo to improve ARAIM availability10,11 within a United States–European Union Framework. 12 However, it is assumed that GNSSs have better positioning accuracy and greater number of visible satellites in simulation analysis than in the actual case, and most studies on ARAIM availability are based on simulation, this does not reflect the real situation of ARAIM availability. There has been less application of real satellite data in the analysis of ARAIM availability.
It was announced that the Galileo system would provide a positioning navigation time (PNT) service to global users on 15 December 2016. There are four GNSSs available in Asia: the GPS, GLONASS, Galileo and BDS. Although the BDS is still in the construction stage, 13 it provides PNT services in Asia.14,15 There are therefore more satellites visible over China than over any other area of the world; more than 30 satellites are visible at any moment of the day. There has been no discussion of improvements to ARAIM availability using real navigation data for China.
In the present study, real navigation data were collected from eight international GNSS service (IGS) stations in China to analyse ARAIM availability. In section ‘Analysis of the availability of multi-constellation ARAIM’, the contribution of multiple constellations to ARAIM availability is analysed and the effect of the geometric distribution of visible satellites on ARAIM availability is discussed. In section ‘Effect of multiple faults on ARAIM availability’, the effect of multiple-fault detections on ARAIM availability is discussed. In section ‘Effect of the error parameters and failure model on the availability of ARAIM’, a sensitivity analysis of ARAIM availability to user range accuracy (URA), user range error (URE), Bias-Nom and Bias-Max parameters, and a priori probability of satellite failure is reported. The threshold of the error parameters is calculated for eight IGS stations in China, and the effect of the locations of stations on thresholds is discussed. In section ‘Discussion of the ARAIM algorithm for a category III navigation service’, two sets of predicted error values are selected for a discussion of the potential of ARAIM for a Category III system.
ARAIM overview
ARAIM based on multiple hypothesis solution separation (MHSS) is mainly used to detect integrity for vertical guidance.16,17 The MHSS algorithm considers both faulted and unfaulted modes, and each mode is assigned a portion of the total integrity budget.1,18 The linearized fault-free GNSS code measurement model using all visible satellites can be expressed as

where

The residual of the state vector

where

where

where

The detection threshold for the kth test statistic is



where

The availability of the ARAIM algorithm is related to the requirements of the LPV-200 level. 20 According to the standards of the International Civil Aviation Organization, LPV-200 level navigation meets at least six conditions:
The integrity risk probability
The vertical protection level (VPL) is less than the vertical alert limit (VAL), and
The horizontal protection level (HPL) is less than the horizontal alert limit (HAL), and
At least 95% of vertical navigation system errors are
The false-alarm probability
The time-to-alert is
The second requirement is more stringent than the other requirements. The ARAIM algorithm can be used in LPV-200 level navigation if the second requirement is met. When determining the VPL value, it is desirable to explicitly include bias terms to account for non-zero means and non-Gaussian behaviour. A bias term is included in bounded errors that may appear random. Examples of such biases are antenna biases or nominal signal deformations. The worst-case effect of nominal biases occurs when the nominal bias of each measurement has the same sign as the coefficient that projects the pseudo-range onto the position.
21
A maximum bias term is thus included to bound the effects of these error sources. These parameters are defined in Walter et al.
22
The analysis of the GEAS
3
is based on two levels of bias magnitude. The magnitude of Bias-Nom is used for the evaluation of accuracy and continuity, and the magnitude of Bias-Max is used for the evaluation of integrity. Bias-Max is used only under fault-free conditions. In ARAIM, corresponding to faulted and unfaulted modes of MHSS, the VPL includes failure-free (

where

where VPL takes the maximum of the above results

where


where
Analysis of ARAIM availability
In this section, we consider the analysis of the availability of multi-constellation ARAIM over China, differences in availability between a single fault and multiple faults, a sensitivity analysis for changes in error parameters (URA, URE, Bias-Nom and Bias-Max) and failure model (
Analysis of the availability of multi-constellation ARAIM
ARAIM availability was analysed over China using real satellite orbit/ephemeris data recorded at eight IGS stations on 7 January 2017. Geographic information for China was obtained from the National Geomatics Center of China. Geometries were simulated every 1° and every 300 s for 24 h. Before the integrity support message23,24 was established, only URA was broadcast in the navigation data, and URE, Bias-Nom and Bias-Max could not be obtained from the broadcast navigation data. Therefore, URE was conservatively considered as 0.5 times URA, and Bias-Nom and Bias-Max were conservatively assumed to be 0.1 and 1, respectively. 3
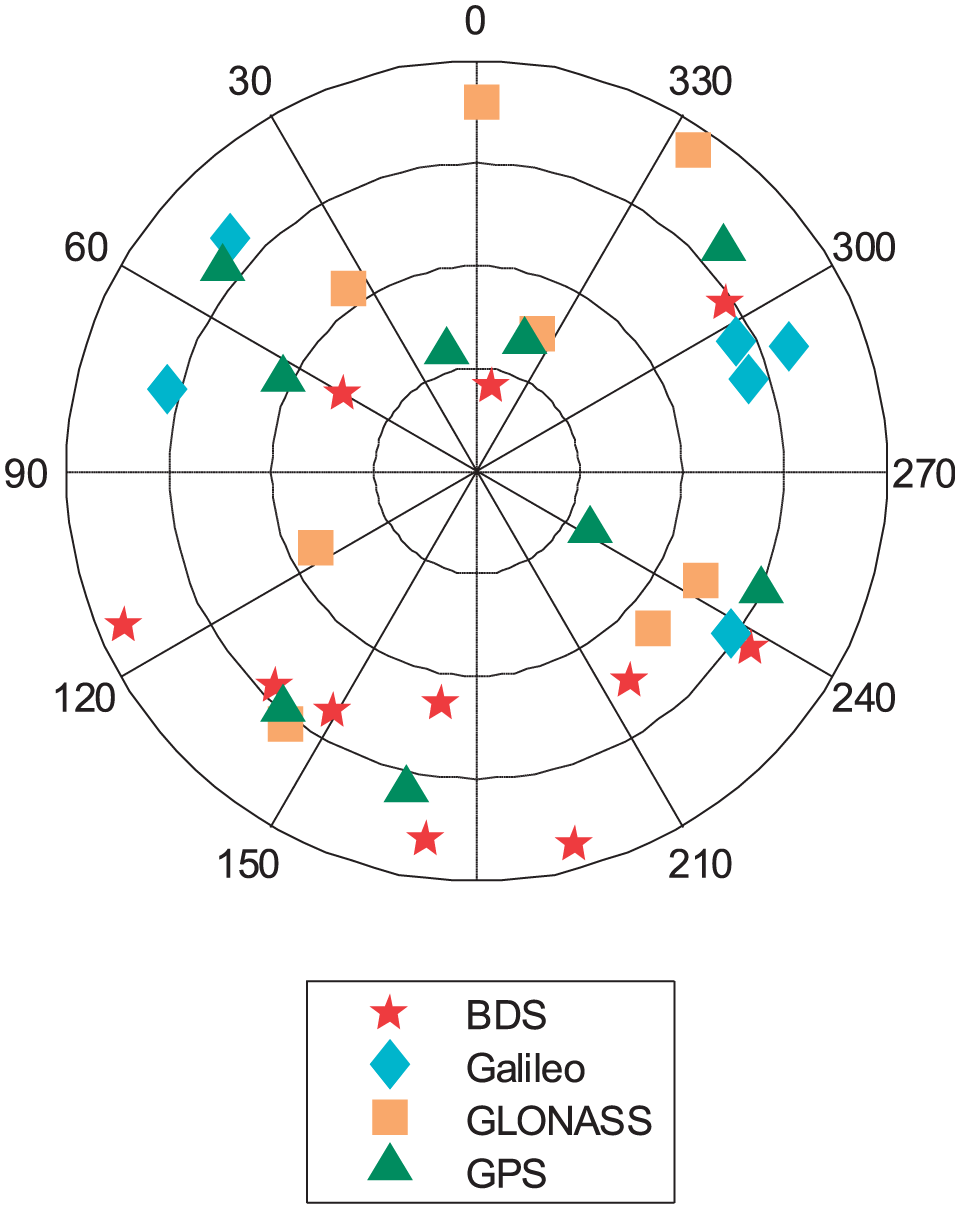
The ARAIM algorithm was initially used for single-constellation integrity testing (with the GPS). Because of the limitations of the number of satellites and positioning accuracy, availability could not meet the requirement of LPV-200. Fortunately, an increase in the number of visible satellites reduced the vertical dilution of precision (VDOP) and thus improved availability. 25 Figure 1 shows that the availability of ARAIM with the integration of the GPS, GLONASS, Galileo and BDS was 100%. The availability of ARAIM was increased because of the large number of GNSS satellites and improved geometry of visible satellites. Considering the Beijing Fangshan (BJFS) station as an example, there were 6–11 GPS visible satellites, as shown in Figure 2. For 89% of the day, there were more than eight GPS satellites visible, and the GPS thus contributed more to availability than did GLONASS and Galileo. When there were fewer than five visible satellites, the single-fault ARAIM could not be used for fault detection, and when there were fewer than six visible satellites, the dual-fault ARAIM could not be used for fault detection. For most of the day, the Galileo system had fewer than five visible satellites, and Galileo thus contributed least to availability. Because of its orbit design, GLONASS had excellent performance at high latitudes and lower performance at low latitudes. At the BJFS station, there were fewer than six visible GLONASS satellites for 6.7% of the day. The contribution of GLONASS to availability was thus limited. The BDS had many visible satellites over China, including five geostationary earth orbit (GEO) satellites; the number of visible satellites stabilized at 9–12. However, more visible satellites do not necessarily provide better availability over China. Figure 3 describes the distribution of BDS satellites visible from the BJFS station at 12:00 on 7 January 2017. Eight satellites were distributed in the southern sky and only three in the northern sky. This geometric configuration provided by five GEO satellites clearly improved availability at low latitudes; however, in China’s high latitudes, the BDS contributed little to the computed availability. Figure 4 describes the distribution of visible GNSS satellites. The four GNSSs had a surprising number of visible satellites that provided almost complete coverage of the sky. This geometric distribution reduced the VDOP effectively, and ARAIM thus met the requirement of LPV-200. The number of satellites in each system is given in Table 1.

Combined contribution of GNSSs to ARAIM availability.

Number of satellites visible from the BJFS station.

BDS visible-satellite distribution.
Visible-satellite distributions for the four GNSSs.
Number of satellites in each system.

GPS: global positioning system; GLONASS: GLObal NAvigation Satellite System; BDS: BeiDou Navigation Satellite System.
Effect of multiple faults on ARAIM availability
The increase of redundant ranging signals in a multi-constellation GNSS improved the integrity monitoring performance of ARAIM, but it also raised the probability of GNSS faults. Only the dual-fault problem was considered under the multiple-fault condition, and the probability of three or more faults was considered negligible. We have




where

As in the case of detecting a single fault, when two satellites were suspected to be faulty, the diagonal elements in matrix
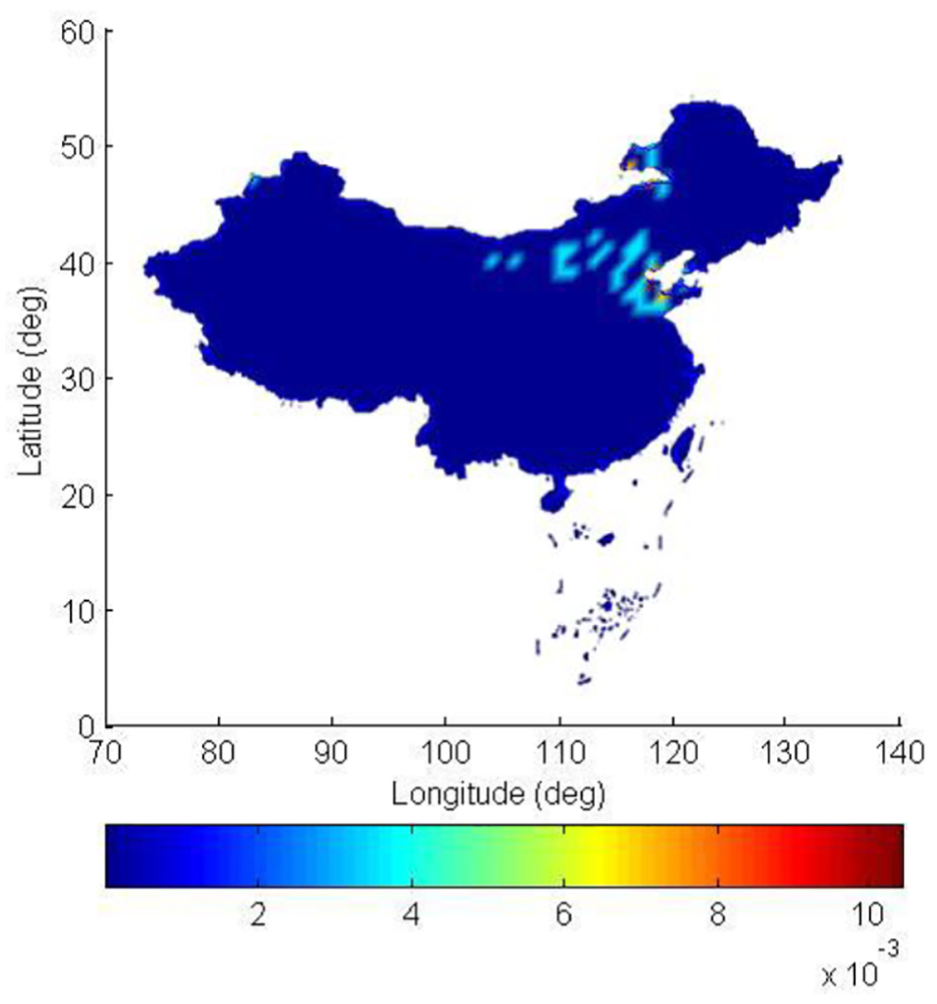
Compared with single-fault detection, dual-fault detection weakened the performance of ARAIM, as shown in Figure 5. There were two areas, A (

Availability of ARAIM in China based on a dual fault.
Effect of the error parameters and failure model on the availability of ARAIM
The four error parameters, URA, URE, Bias-Nom and Bias-Max, affected ARAIM availability. URA is the standard deviation of a distribution that bounds the distributions of the range component of the clock/ephemeris error in the absence of a fault condition and is used to evaluate the availability of the integrity monitoring function. URE is the non-integrity-ensured standard deviation of the range component of the clock/ephemeris error and is used to evaluate accuracy and continuity performance. 3 Bias-Nom and Bias-Max are expectations for overbounding Gaussian distributions. Bias-Nom is used to evaluate the accuracy and continuity performance, whereas Bias-Max is used to evaluate integrity performance.
In this section, the sensitivity of the four error parameters on availability is analysed using real satellite orbit/ephemeris data from eight IGS stations in China. Among the 86,400 epochs, we considered one observation value every 300 epochs and collected values for a total of 288 time steps. The constellations used for sensitivity analysis included GPS, GLONASS, Galileo and BDS, and
Figure 6 and Table 2 show the geographic locations of the eight IGS stations. Figure 7 shows the analysis of the sensitivity of ARAIM availability to URA, demonstrating that availability decreased as URA increased. When URA was less than 4.5, each station had 100% availability; however, when URA exceeded 5, the availability for each station began to decrease, and the downward trend was divergent. The decline in availability had a nonlinear relation with the increase in URA. The sensitivity of the availability to URA differed across the eight IGS stations. The availability was more sensitive to URA at the Wuhan (WUH2) station than at the ChangChun (CHAN) station. At the Hsinchu (TCMS) and Taoyuan (TWTF) stations, which had similar earth-centred earth-fixed coordinate values, the sensitivity was similar.

Distribution of eight IGS stations.
Earth-centred earth-fixed coordinates of IGS stations.


Effect of URA on availability.
Figure 8 shows the analysis of sensitivity of ARAIM availability to URE. Each station met the availability requirement when URE was less than 3.5, whereas only the availability of the CHAN station began to decrease obviously when URE increased to 4.3. The downward trend in availability with an increase in URE between 4.2 and 8.5 was linear for the CHAN and Urumqi (URUM) stations; moreover, other stations exhibited an obvious nonlinear trend such that availability declined more rapidly with increasing URE.

Effect of URE on availability.
Figure 9 shows the analysis of the sensitivity of ARAIM availability to Bias-Nom. The decline in availability with increasing Bias-Nom was very small. When Bias-Nom was greater than 3.5, the availabilities for CHAN and URUM stations first began to decrease; however, the rate of decline was less than that for the other stations. The sensitivity of ARAIM availability to Bias-Nom was different at the TWTF and TCMS stations; this result was not the same as the results for URA and URE.

Effect of Bias-Nom on availability.
Figure 10 shows the analysis of the sensitivity of ARAIM availability to Bias-Max. When Bias-Max was greater than 2.5, availability appeared to decline at all stations. The nonlinear trend was similar to that of URA, with the difference being that the effect of Bias-Max on availability was stronger than that of URA; for example, the availability for a Bias-Max of 6 was less than the availability when URA = 9.

Effect of Bias-Max on availability.
The effects of the four error parameters on availability were not the same. Table 3 presents the thresholds of the error parameters for meeting the requirement of LPV-200 at the eight IGS stations. Table 4 presents the order of error parameters based on sensitivity, which was computed by considering the reciprocal of the threshold magnitude when using the threshold magnitude to evaluate the importance of the effect of an error parameter on availability. However, there is an objective factor that we should consider: the base values of the four error parameters differed. To add information on the base values, we computed the ratio of the base values to the threshold. The order based on this factor is presented in Table 5.
Error parameter thresholds of meeting the availability requirement.
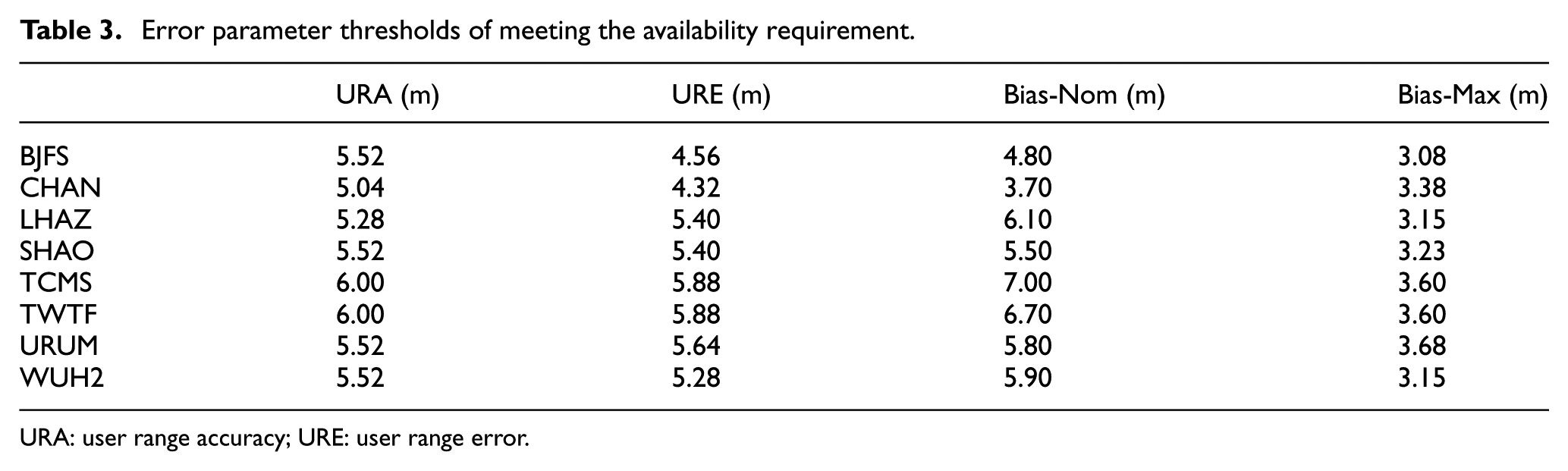
URA: user range accuracy; URE: user range error.
Order of magnitudes.
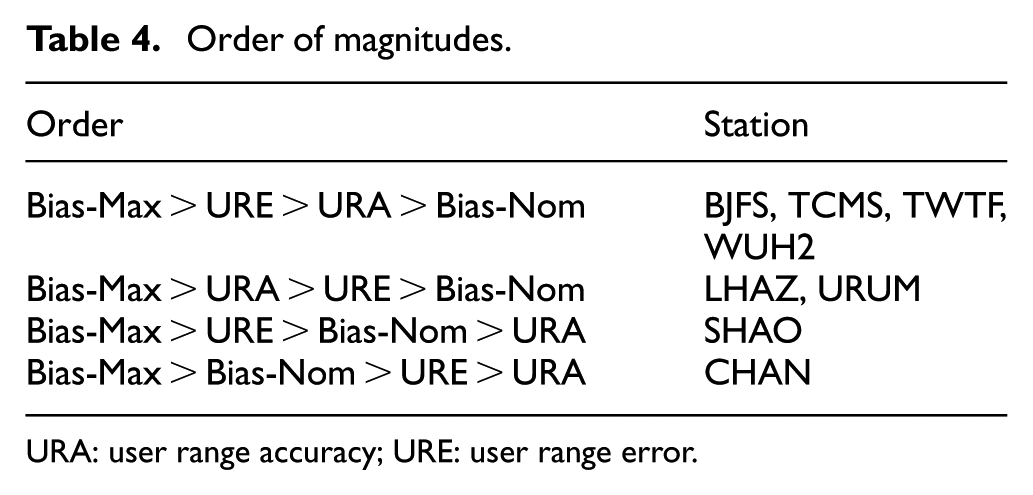
URA: user range accuracy; URE: user range error.
Order of factors.

URA: user range accuracy; URE: user range error.
We assumed that the thresholds in Table 3 were a set of random samples. There is a strong interest in studying the sample variance of the parameters that describe the variation range of parameters at all stations. The variance of URA was 0.3255, that of URE was 0.5753, that of Bias-Nom was 1.0521 and that of Bias-Max was 0.2397. These results demonstrate that a change in geography had little effect on the thresholds of URA and Bias-Max and had a greater effect on the thresholds of URE and Bias-Nom.
In addition to the four error parameters, the prior probability of a single satellite failure

Effect of
Discussion of the ARAIM algorithm for a category III navigation service
The above analysis shows that the effect of URA on availability was important. Currently, the maximum value of URA is 2.4 m when satellites are in good repair. The magnitude of URA is expected to decrease with the future deployment of satellites, and ARAIM may therefore be used for more rigorous vertical navigation services. In this section, the feasibility of using ARAIM for Category III navigation services is discussed, with simulation data taken from the previous studies.3,17
Table 6 presents real data (RD) from a satellite broadcast that has a real error level; predictive data 1 (PD1) were obtained from Kropp et al. 17 for the predicted error magnitude of the GPS and Galileo, where we assume that the BDS and GLONASS have the same data as the GPS; predictive data 2 (PD2) were obtained from the previous report 3 for the predicted error magnitude of the GPS, where we assume that the other GNSSs have the same data as the GPS.
Error parameters.

URA: user range accuracy; URE: user range error; RD: real data; PD1: predictive data 1; PD2: predictive data 2.
Figure 12 shows that ARAIM had no fault detection ability at the current level of error. Figure 13 shows that the availability of ARAIM clearly improved when using PD1. As shown in Figure 14, the availability when using PD2 met the requirement of a Category III navigation standard in 79.04% of China. The analysis results are presented in Table 7.
Availability using RD.

Availability using PD1.

Availability using PD2.
Coverage of ARAIM availability in China.

ARAIM: advanced receiver autonomous integrity monitoring; VAL: vertical alert limit; RD: real data; PD1: predictive data 1; PD2: predictive data 2.
Conclusion
We presented the ARAIM availability for LPV-200 using real satellite orbit/ephemeris data collected from eight IGS stations in China. The results demonstrated that the ARAIM availability was significantly improved by combining GPS, GLONASS, Galileo and BDS, and ARAIM algorithm was potential for meeting the LPV-200 requirement in China. The effect of multiple faults was also analysed, and the test results demonstrated weakened ARAIM availability in two areas; however, the availability met the requirement of LPV-200 throughout most of China.
The effect of changing error parameters (URA, URE, Bias-Nom and Bias-Max) on availability was analysed using the same data as that used for availability analysis, and the ARAIM sensitivity analysis demonstrated that the availability decreased almost nonlinearly with increases in error parameters, and that there were different changes in availability because of increases in different errors. The analysis showed that URA was the sensitivity factor most important to availability, and the URA and Bias-Max thresholds were not obviously associated with the geographic location of the IGS station; however, the geographic location had a stronger effect on the other two parameter thresholds. In addition, the effect of changing the magnitude of the failure model on availability was analysed, and the results demonstrated that the fault model had a much smaller effect on ARAIM usability than the error parameters when four GNSSs were used for the ARAIM algorithm over China.
In the last part of the study, the potential use of the ARAIM algorithm for a Category III navigation service was discussed for two sets of predicted error data. The results showed that the ARAIM algorithm with simulation data could be used for a Category III navigation standard in 79.4% of China. With the completion of the Galileo and BDS constellations, ARAIM availability will have potential for further improvement.
Footnotes
Handling Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant number 61502257).