
Abstract
Global navigation satellite systems are widely used across the world because of their continuous/all-weather, global coverage, and high precision positioning. But, three-dimensional positioning accuracy, especially in the vertical direction, remains insufficient because of the geometric distribution of satellites. This is especially true for air-borne objects such as unmanned aerial vehicles, civil aviation devices, and missiles. To solve this problem, we adopt a satellite-ground joint positioning system based on a pseudo-satellite (pseudolite). The introduction of ground pseudolites can significantly reduce the vertical dilution of precision and improve positioning accuracy. This method has been proposed in the 1980s. However, we have to ask a question, as long as we add a pseudolite, can the positioning accuracy be improved? The answer is no. Pseudolites can cause time synchronization problems with satellites, and the resulting timing errors of the pseudolite are converted into pseudorange errors, reducing accuracy. Here, we seek to evaluate the impact of the reduced vertical dilution of precision and the increased range errors associated with the introduction of a pseudolite on the ground. We derive a mathematical formula to explain this relationship. We conclude that when the satellite range error and the change in the position dilution of precision associated with a pseudolite are known, we can calculate an approximate limit for the pseudolite timing accuracy to ensure that the use of the pseudolite improves the positioning accuracy. This work should be of great value in guiding engineering practice.
Introduction
A pseudolite is a global navigation satellite system (GNSS)–like signal transmitter mounted on the ground, in the sky, or on a ship, that emits similar GNSS signals to GNSS satellites. The concept of a pseudolite was first proposed in the early 1970s. The global position system (GPS) receiver was tested using pseudolites in the desert before the first GPS satellite launch. 1 Although pseudolite was proposed earlier, it has not been widely used for many reasons such as high price, time synchronization, near–far effect, and multipath effect.
With the development of the four global navigation systems, the multi-mode system makes the positioning accuracy and integrity of users better, and has a smaller Dilution of Precision (DOP) distribution.2,3 As a “GNSS” satellite that can be laid flexibly on the ground, pseudolite technology is still very important for the contribution of DOP and the improvement of user positioning accuracy. In the late 1980s, pseudolite technology was used to enhance the precision of real-time dynamic positioning of aircraft, in order to guide approach and landing. Many scholars have done valuable research in this area. For example, Dr Cobb has verified that pseudolite technology can improve the Integrated Beacon Landing System (IBLS) using Carrier-phase Differential GPS (CDGPS) navigation. 4 Kiran and Bartone have analyzed the errors associated with the integration of a Wideband Airport Pseudolite (WBAPL) into a prototype Local Area Augmentation System (LAAS), 5 and the inclusion of the WBAPL was shown not only to improve the availability of the system but also to reduce errors. In addition, other pseudolite concepts and a variety of pseudolite devices were proposed for use in many fields, such as deformation monitoring, 6 indoor positioning, 7 and Mars exploration. 8 Another typical application is the LOCATA system, 9 which uses LOCATANET patent technology to set up an independent foundation positioning system. The single-point positioning accuracy of the system can reach the centimeter level.
The most important problem in pseudolite technology is time synchronization. 10 Whether it is an independent pseudolite system or a system composed of real navigation satellites and pseudolites, the accuracy of time synchronization directly affects the system’s performance. 11 At present, the mainstream time synchronization methods include two-way time and frequency transfer12,13 and GNSS timing receiver for pseudolite timing.14,15 However, there are few quantitative studies on the time synchronization requirement of pseudolite. Most of studies are based on existing technologies to obtain the ability of time synchronization through experiments. There may be a situation where a pseudolite has been achieved time synchronization by some kind of time synchronization method, but unfortunately, it may be not improve the user positioning accuracy. This paper is to give such a standard or performance limit, that is, the relationship between the time synchronization accuracy of the pseudolite and the user positioning accuracy. In other words, how much time synchronization accuracy of pseudolite should be reached; it can be said that the introduction of pseudolite is meaningful for improving the user positioning accuracy. In this paper, the time synchronization requirement of a pseudolite is deduced theoretically, providing guidance on what time synchronization methods should be used for different scenarios.
The next section describes the background and composition of the satellite-ground joint positioning system. Section 3 analyzes the relationship between the time synchronization of the pseudolite and the associated positioning error. The performance of the formula derived in Section 3 is tested with simulations in Section 4. The final section presents our conclusion.
Background and system design strategy
The positioning accuracy of a GNSS system depends on two factors: the pseudorange or carried-phase measurement error and the spatial geometry of the satellite constellation relative to the user. 16 Taking the GPS system as an example, we set up a simulation environment. The object takes off on a parabolic trajectory at 74° east longitude and 40° north latitude. The flight range is approximately 350 km, the elevation of the GPS antenna is 10°, and the maximum height of the parabola is 45 km. The object lands at 70° east longitude and 40° north latitude. The DOP distribution for the whole flight process is shown in Figure 1(a). From this figure, we can see that the three-dimensional Position Dilution of Precision (PDOP) is poor because of the poor Vertical Dilution of Precision (VDOP). If we place a pseudolite near the place of departure, the DOP distribution is improved, as shown in Figure 1(b). In particular, we see that the VDOP has fallen from 2.64 to 1.28. The conclusion is that poor VDOP will reduce the user’s positioning accuracy. Therefore, it is a good way to improve the positioning accuracy by improving DOP, especially VDOP.
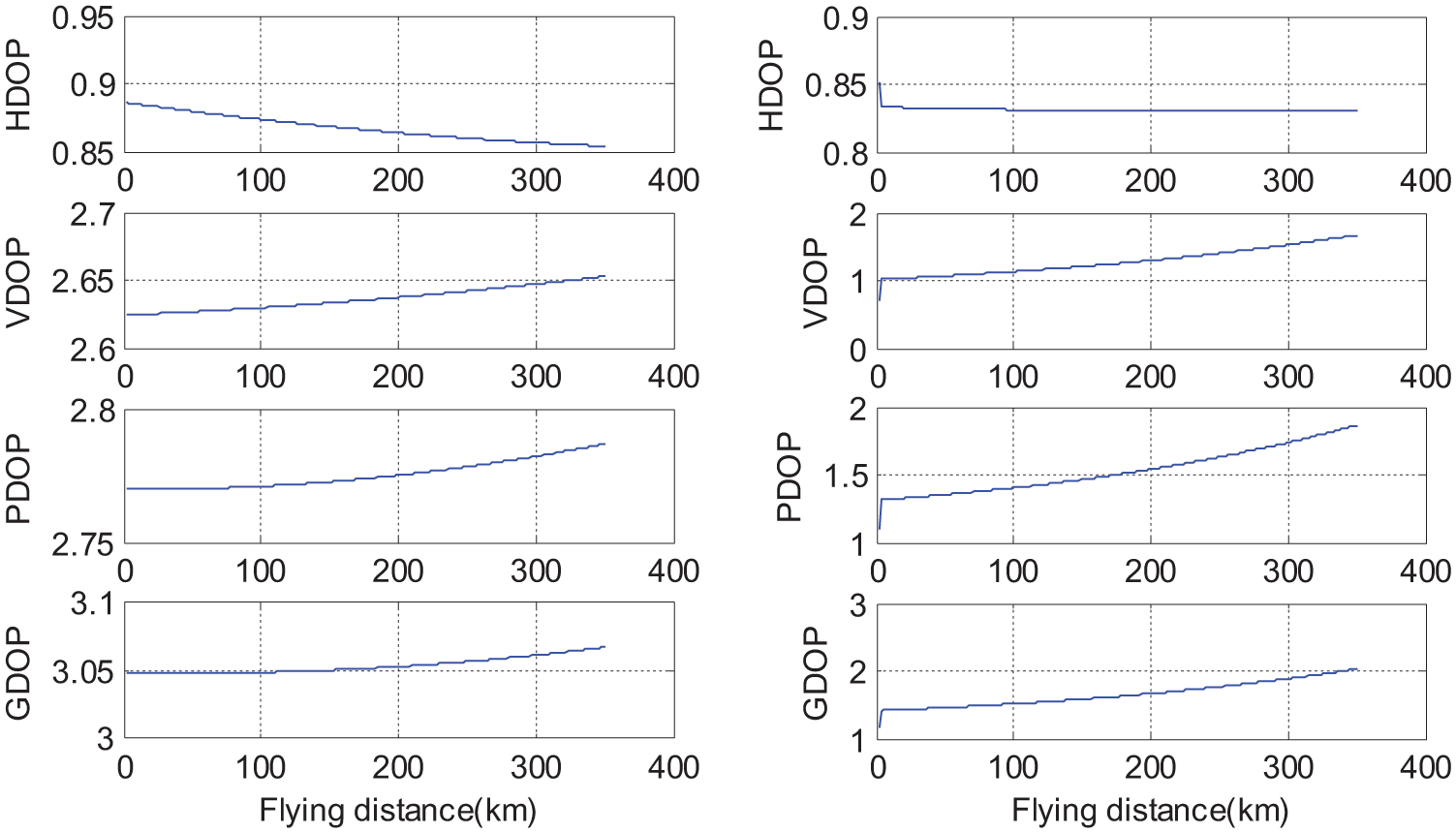
(a) The DOP distribution during the flight of the object. (b) The improved DOP distribution obtained when adding a pseudolite near the departure point. HDOP: horizontal dilution of precision; VDOP: vertical dilution of precision; PDOP: position dilution of precision; GDOP: geometric dilution of precision.
The architecture of GNSS augmentation system based on pseudolite
As the above example, we can see that the introduction of pseudolite can greatly reduce the DOP value. Protaziuk 17 took the lack of visible satellites as the background for urban environment, then the support of the satellite network by ground-based signal transmitters increases the possibilities to apply satellite positioning in deformation monitoring. But the article lacks the accomplished content about satellite network. Sultana 18 analyzed the effects of pseudolite positioning on DOP in LAAS in detail, and quantitatively analyzed the placement of pseudolite and the changes of DOP value before and after. With these ideas, we adopt a satellite-ground joint positioning system as illustrated in Figure 2. This system uses a pseudolite on the ground. The pseudolite consists of a GNSS timing receiver, an atomic clock, and a transmitter.
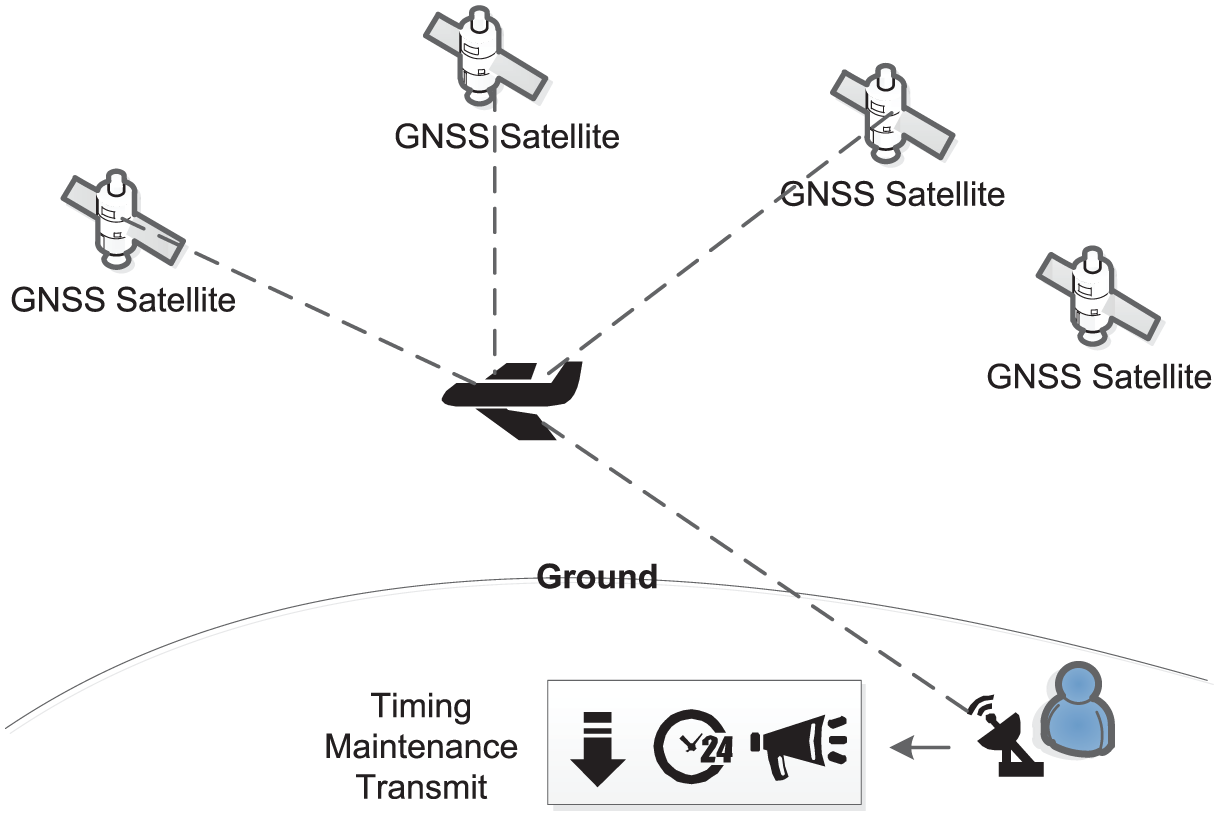
The satellite-ground joint positioning system. Adding a pseudolite improves the positioning accuracy by improving the geometric distribution of the constellation. The pseudolite consists of a GNSS timing receiver, an atomic clock, and a transmitter.
The working process is as follows: First, the pseudolite time is synchronized to the GNSS system time by using the GNSS receiver. Second, the time benchmark is maintained by the atomic clock. Finally, the pseudolite transmitter is used to launch the pseudolite signal for measuring the object’s position.
Compared with other satellite-ground augmentation systems, the system designed in this paper has its own advantages and characteristics:
The time synchronization between the GNSS and the pseudolite adopts receiver timing method and the atomic clock to maintain the time benchmark.
The fixed ephemeris technology is used to realize the arrangement of the pseudolite’s ephemeris.
The technical characteristics of GNSS augmentation system based on pseudolite
Time synchronization technology and pseudolite system time maintenance
In the introduction, two main time synchronization schemes are mentioned: two-way time and frequency transfer and GNSS time receiver for pseudolite timing. If the former method is adopted, the transmission mode of satellite must be changed, and the design of pseudolite will become complicated. Considering the complexity of pseudolite design and engineering practice, the receiver timing method is proposed to synchronize the time of pseudolite with GNSS.
At present, the timing level of commercial receivers is 10–20 ns. We adopt an UB380 OEM board of Unicore Communications, Inc. as shown in Figure 3(a), and the timing accuracy reaches 20 ns Root Mean Square (RMS). After the timing is completed, the rubidium frequency standard is used to maintain the time benchmark in Figure 3(b). Finally, the pseudolite signals are transmitted by directional or omnidirectional antennas.

(a) The GNSS receiver for time synchronization of pseudolite with GNSS. (b) Time maintainer—Model FS725 Rubidium Frequency Standard.
The fixed ephemeris technology of pseudolite
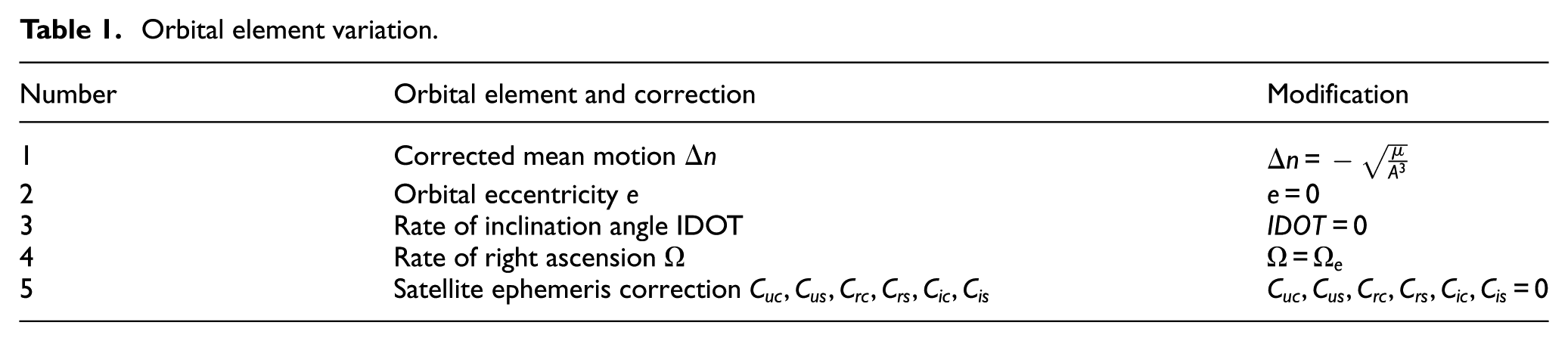
The pseudolite is realized by the navigation signal simulator developed by our laboratory in Figure 4. Compared with the real navigation satellites that move at high speed in space, pseudolite is fixed on the ground and relatively static. So it is necessary to design the stationary ephemeris. The feasibility and effectiveness of the fixed ephemeris technology have been fully demonstrated in the published literature. 19 To sum up, the core of fixed ephemeris technology is to set zero for the time-related parameter of the six orbital roots which determine the positions of satellites so that the pseudolite location cannot change over time under any circumstances. We make a Table 1 to explain which parameters need to modify.
Orbital element variation.
After introducing the design idea of the GNSS augmentation system based on pseudolite, it can be seen that the pseudolite integration, software design, and hardware design are very challenging. Due to the time synchronization error between pseudolite and navigation system, the error will affect the user positioning accuracy. In the bad case, the user positioning accuracy may decline instead. Therefore, it is necessary to analyze the relationship between the time synchronization accuracy of pseudolite and the user positioning error (Figure 4).

The hardware implementation of pseudolite by the navigation signal simulator.
Analysis of the pseudolite time synchronization and positioning errors
Pseudolite time synchronization
The satellite positioning system maintains a unified time–space benchmark, and the positions and clocks of each satellite are maintained by this system. Pseudolite time synchronization is the process of determining the difference between the time of the pseudolite and that of the satellite system. The timing technology, which is based on the navigation satellite, can be divided into two situations: (1) The user coordinates are known. In this case, only one satellite is needed for timing measurements. This can be used to detect contradictions and anomalies by tracking multiple satellites. (2) The user coordinates are unknown. Local coordinates can be precisely obtained through long-duration positioning. Timing can be measured from this positioning, but the timing accuracy is limited. For a normal user, the position coordinates can be determined through different positioning methods, and then timing measurements can be derived. The timing measurement precision is therefore affected by the positioning accuracy.
The GNSS receiver can obtain information on an object’s location, speed, and time, so we can use either of these two methods. Usually, we adopt positioning and timing simultaneously. The GNSS is based on the principle of measuring time and distance. To complete the timing function, we need to have four parameters: the location of the receiver (longitude, latitude, and height) and the deviation of the receiver clock from the standard time of the navigation system. Therefore, in the situation in which the user location is unknown, at least four satellites need to be used to achieve positioning and timing measurements. If the exact location of the user is known, the timing measurement can be achieved using data from a single satellite.
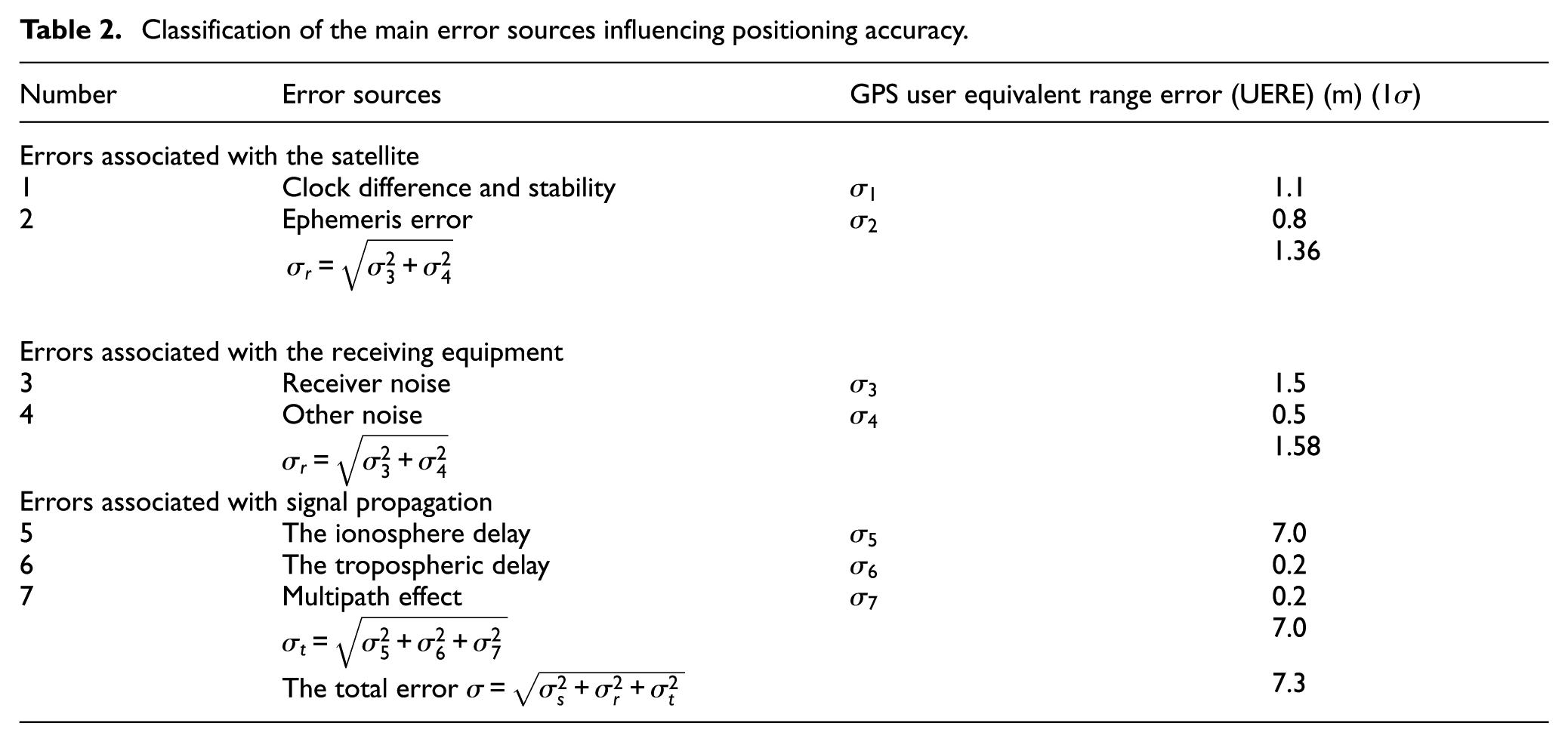
The main error sources that affect the positioning and timing measurement accuracy can be divided into three categories: the error associated with the satellite, the error associated with signal propagation, and the error associated with the receiving equipment. In addition, there are other possible error sources such as Earth’s rotation, relativistic effects, and tides. The effect of these errors on the positioning and timing accuracy is generally small. The current actual levels of these error sources in the GPS system for the single frequency receiver are listed in Table 2.
Classification of the main error sources influencing positioning accuracy.
Analysis of time synchronization requirement
Table 1 provides the main error sources associated with pseudorange measurements. The positioning accuracy also depends on the geometry of the observed satellites. The precision of the positioning/timing determined by the GNSS is finally calculated as the product of the geometrical factor and the pseudorange error factor 16
The pseudolite time is synchronized to the GNSS system time by the GNSS receiver in the satellite-ground joint positioning system. The time synchronization error of the pseudolite can be converted into a UERE and affects the user positioning accuracy. The aim is to understand how to balance the improved DOP and increased UERE associated with the addition of a ground-based pseudolite. We derive this relationship below.
We need to make two assumptions before the formula is derived. (1) The number of GNSS satellites that a user can observe is

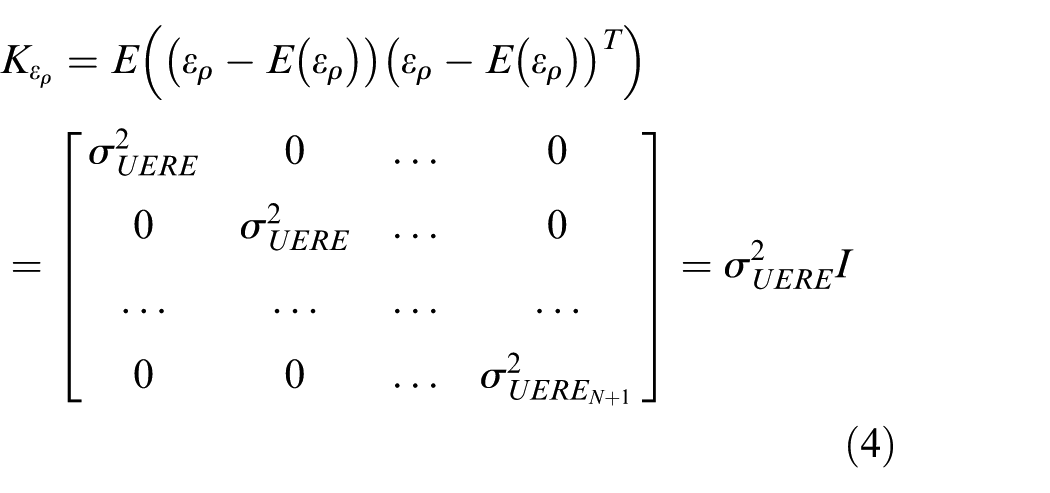
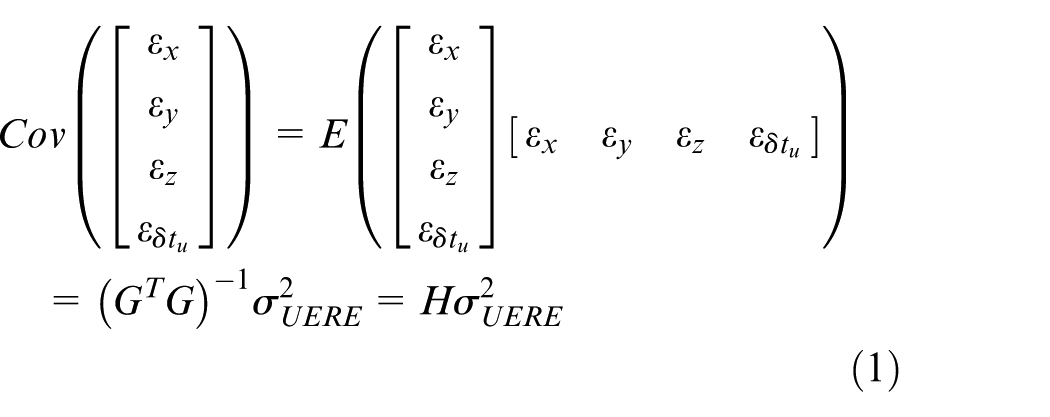
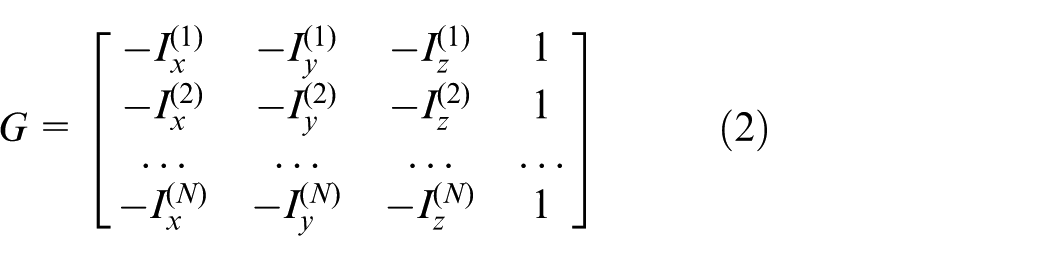
Based on the definition of the DOP, 19 the covariance matrix of the positioning error can be expressed as
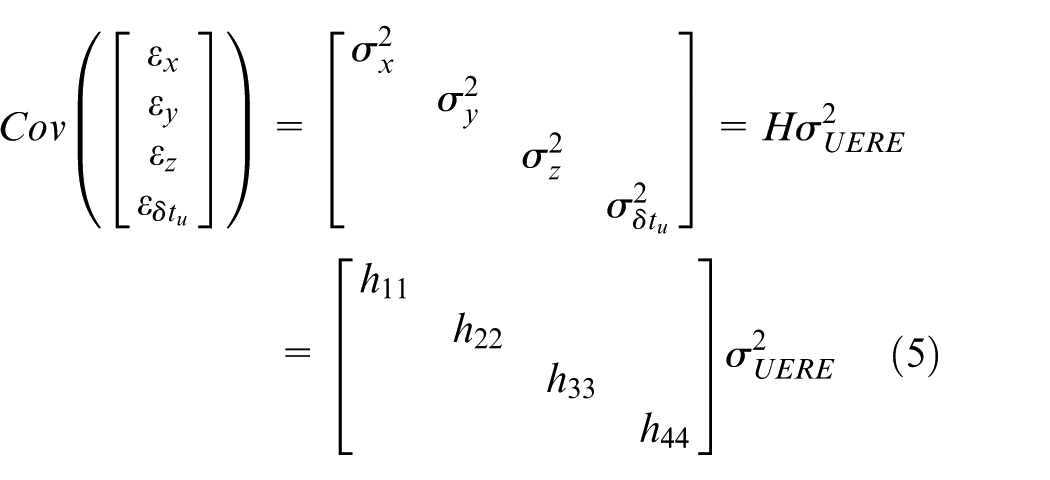
So the standard deviation

The derivation of the mean of the three-dimensional positioning error
So the mean of three-dimensional positioning error
We perform an appropriate amplification of Equation (9)

In the derivation of the above formulas,

We select the
When
The mathematical relationship in Equation (14) can be expressed as shown in Figure 5. When a pseudolite is added, in the


The mathematical relationship between the three-dimensional positioning errors
The
Here, we define
Equation (17) can be considered to be composed of two functions:
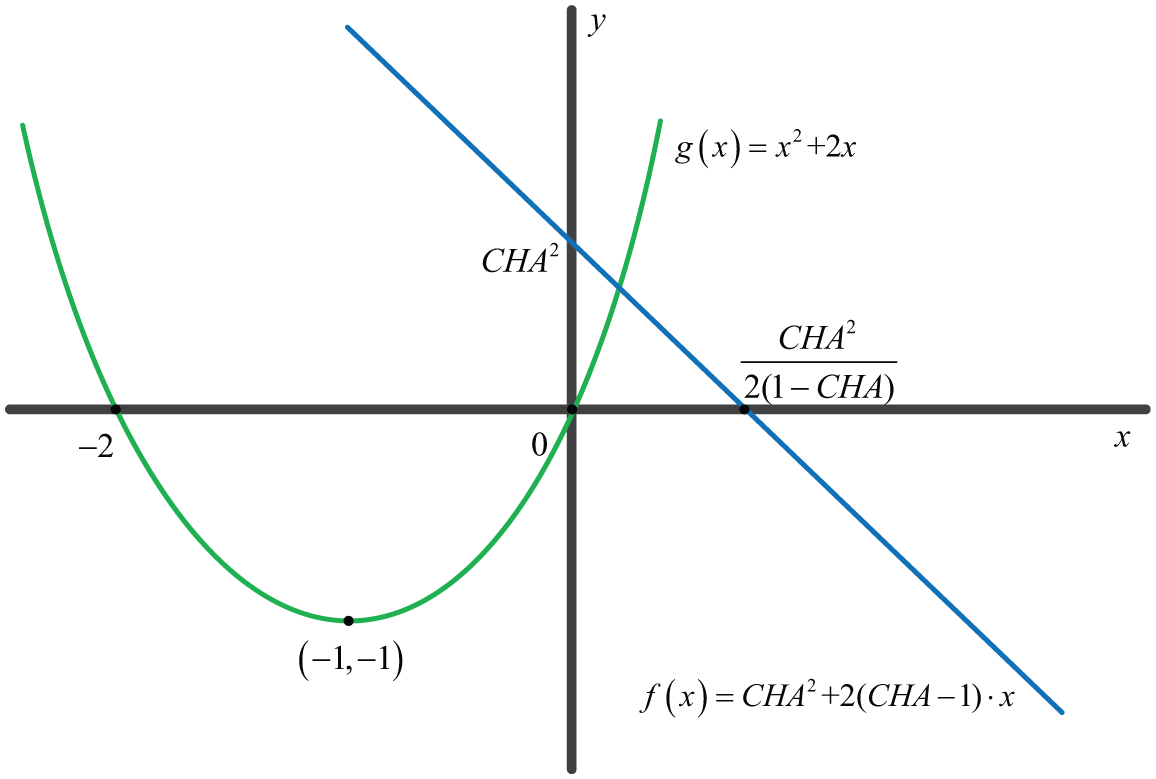
The mathematical relationship between
Because
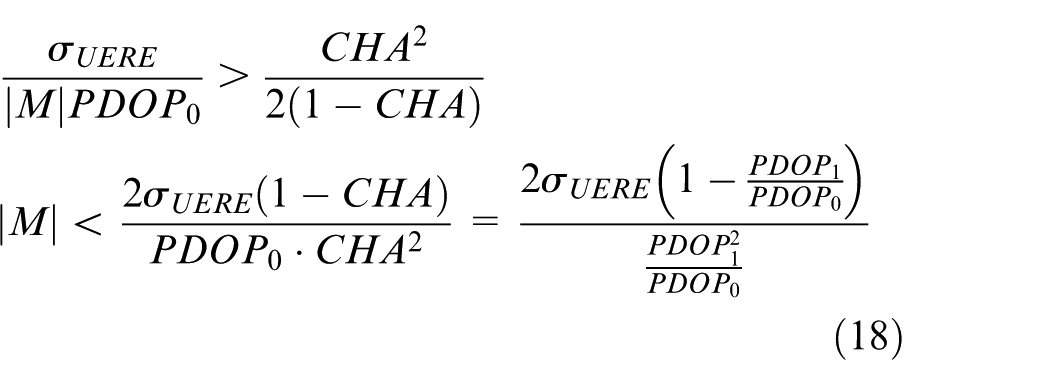
The conclusion of Equation (18) is that the timing accuracy of a pseudolite is mainly influenced by three factors: the standard deviation of the UERE of each satellite

The
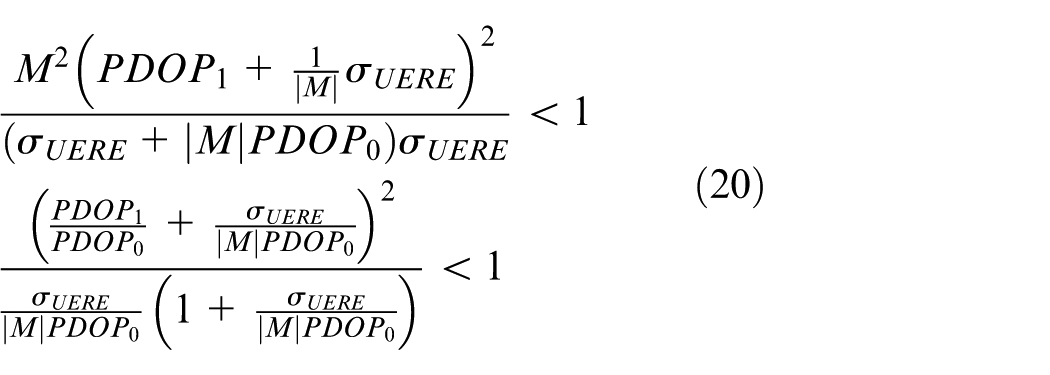
We can also use
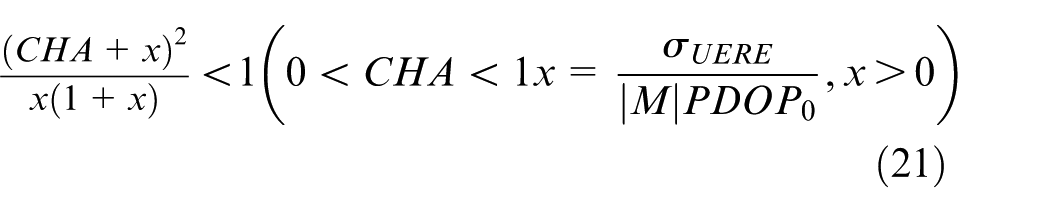

Because
Compared with Equation (18), Equation (23) sets more restrictive conditions. The timing precision requirement from Equation (23) is also determined by three factors:
We take an example to demonstrate the use of Equation (18). According to the simulation environment and results in the “Background and System Design Strategy” section, we choose
Thus, the timing precision of the pseudolite must be less than
Because
Simulations
In this section, we verify the accuracy of the formulas provided in Section 3 using specific simulation scenarios from Section 2.
Experimental conditions
The object flight status is as described in Section 2, and the
Experimental methods
According to the above parameters, we can conclude that the
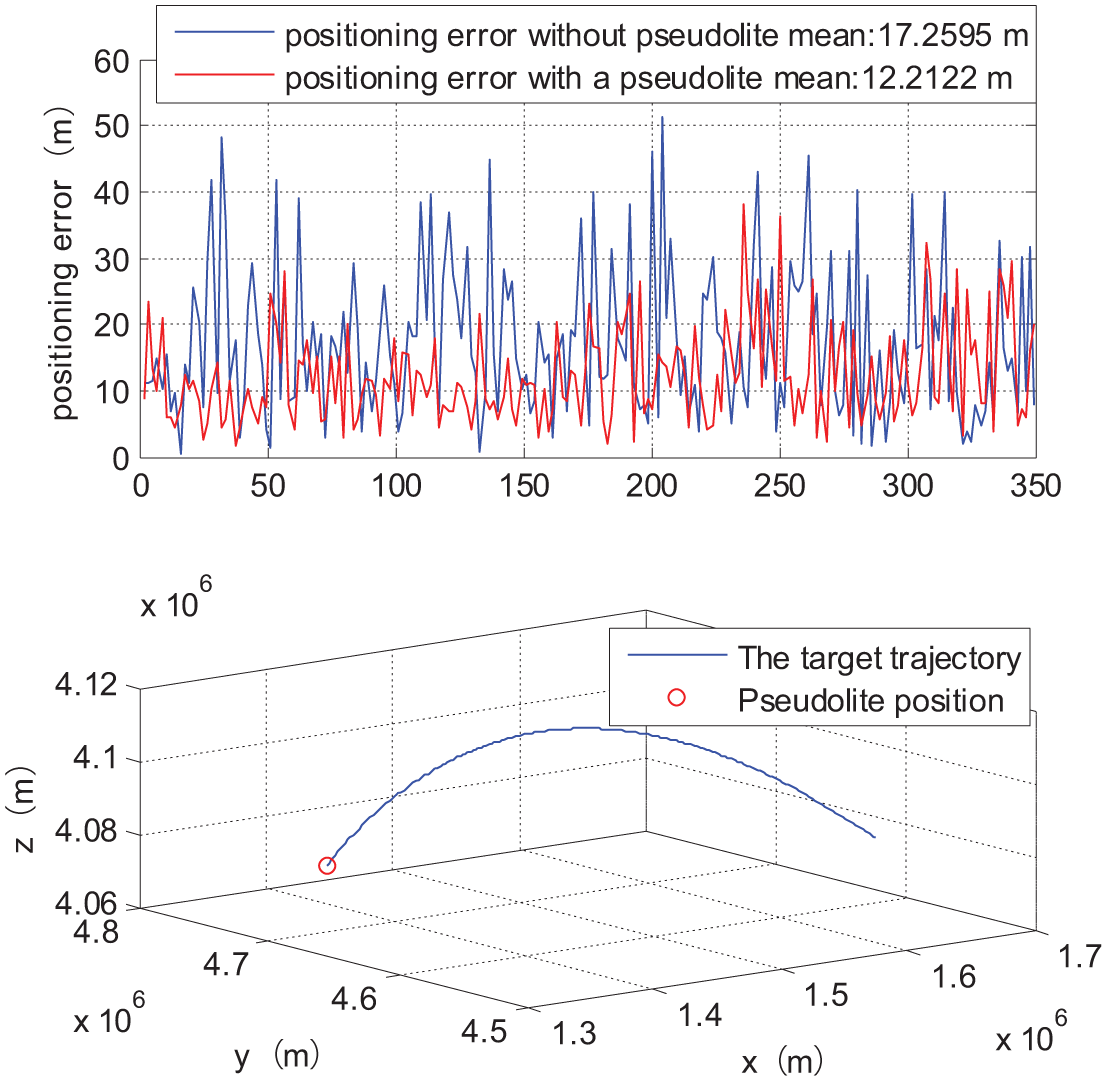
From top to bottom, the panels show the positioning error of the target before and after adding a pseudolite and the target flight trajectory. We can see, using Equation (18) to get
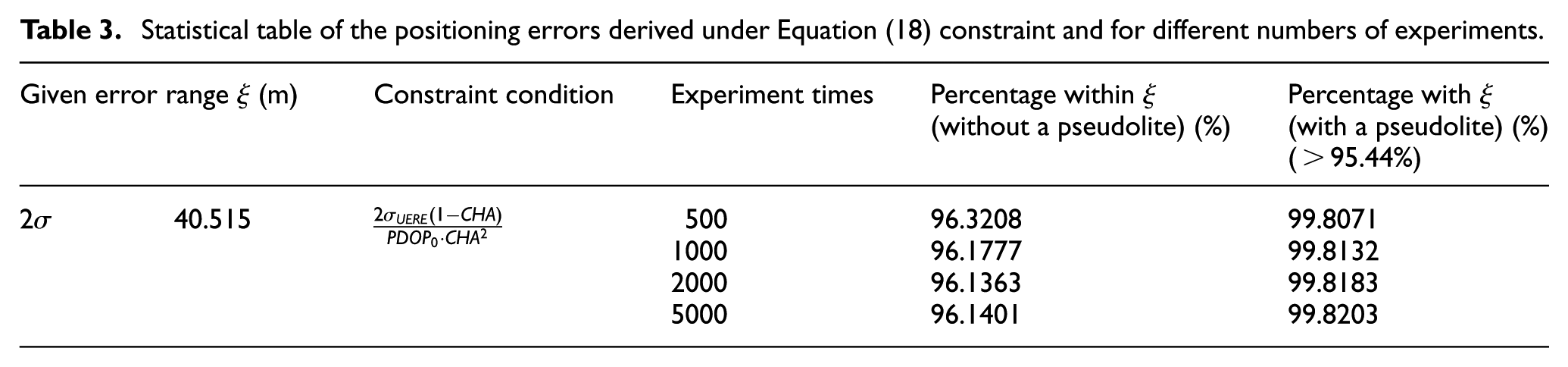
Figure 7 shows the positioning error results for a single target flight. To get more convincing results, we need to perform statistical analysis of multiple instances. We do this statistic in Table 3. From the table, we can see that the constraint condition gives high confidence coefficients. Here, we need to answer one question. Why is it that the positioning accuracy is much higher than expected for the given constraint? There are two reasons. (1) After adding a pseudolite, the positioning error
Statistical table of the positioning errors derived under Equation (18) constraint and for different numbers of experiments.
Conclusion
In this paper, based on a satellite-ground joint positioning system using a pseudolite, the system improves the user positioning accuracy (especially for air-borne targets) by improving the DOP value. The relationship between the timing accuracy of the pseudolite, the standard deviation of the UERE, and the PDOP values before and after adding a pseudolite has been analyzed theoretically. Under different constraint conditions, different timing accuracies required for the pseudolite can be derived, which depend on the standard deviations of the UERE and the PDOP before and after the addition of the pseudolite. If the timing precision of the pseudolite can satisfy these conditions, the user can basically guarantee that the positioning error will be confined to a given range. If the timing precision does not meet this criterion, the introduction of the pseudolite will probably not improve the user positioning accuracy. By considering the current GPS system, the required timing accuracy for a GPS receiver in a pseudolite structure can be estimated. The requirement of the timing accuracy is about 25.8 ns. For current commercial receivers, this value is easy to reach.
The derivation of time synchronization requirement of pseudolite is of great theoretical value to engineering practice. Field test will be carried out combining with the designed pseudolite in the next step, and the correctness of the theory is verified.
Footnotes
Acknowledgements
Chao Ma and Yinyin Tang derived the formula and designed the simulation. Jun Yang put forward the engineering problem of time synchronization. Chao Ma and Jianyun Chen reviewed and edited the manuscript. All authors read and approved the manuscript.
Data availability
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.