
Abstract
This article studies on the analysis of safety characteristics of flight situation in complex low-altitude airspace with Agent-based simulation. Several aircraft behavior models are proposed taking account of complex low-altitude environment and general aviation flight characteristics, including an individual aircraft behavior model, a multi-flight behavior model, and an individual interaction model. And, some flight situation indicators are introduced to be used to analyze safety characteristics, such as flight volume, average speed, and flight conflict. In addition, a mixed flight situation simulation environment for complex low-altitude airspace is built with Agent technology and NetLogo. Based on the simulation environment, the relationship and influence rules among these flight situation indicators are found with flight situation evolution process. The results show a non-linear relationship between flight volume and flight conflict and conflict time; as flight volume increases, the fluctuation of average separation decreases, while the average speed-change increases first, but decreases with continuous increase in the volume, meanwhile the average heading-change gradually stabilizes after initial increase. It is also found that a reasonable setting of flight parameters is beneficial for the smooth operation of low-altitude airspace.
Introduction
Low-altitude airspace is an important part of the national airspace system, and the main flight area of various kinds of general aircraft, which is of tremendous economic and social values. 1 Complex low-altitude flight situation refers to the whole flight status and trend formed by the interaction of the aircraft group and various influence factors in certain space–time. The researches in low-altitude airspace operation mainly focus on low-altitude flight behavior modeling and simulation.
In conflict detection and resolution (CDR) area, various CDR algorithms were clustered;2–6 two low-altitude flight conflict resolution models based on speed adjustment and heading adjustment were proposed, and the models were verified with controller simulator; 7 a low-altitude flight conflict resolution algorithm and related system architecture were proposed based on the concept of see-and-avoid and in reference to traffic collision avoidance system (TCAS) and visual flight rule; 8 a convective weather avoidance model (CWAM) aiming at possible convective weather problems based on the meteorological information database was developed; 9 the inter-coordination problem was studied among aircraft groups within certain airspace from the perspective of integer linear programming and a 0–1 linear programming model was built; 10 agent technology was used to study the modeling and simulation of complex low-altitude flight activities, and the characteristics of complex low-altitude mixed flight situation were explored by developing a complex low-altitude flight simulation platform taking account of general aircraft Agent and low-altitude environment Agent; 11 an adaptive control modeling and simulation method was proposed for general aviation based on optimal control theory.12,13 There have been many results in the literature about urban transportation control method like transit passengers, cargo freight, and so on,14–20 but there lacks the study for general aviation aircraft group behavior and mixed behavior, as well as the integrity and safety of flight situation in complex low-altitude airspace operating environment. It gradually becomes difficult to satisfy the actual demand of safety surveillance for mixed flight behaviors in complex low-altitude airspace.
The focus of this article is the mixed flight situation in complex low-altitude airspace. Following the characteristics of complex low-altitude airspace and the features of typical general aviation activities, the individual general aircraft model is proposed capturing nominal flight behaviors, as well as the corresponding rules for group conflict avoidance. Using simulations, the evolution laws and characteristics are studied in terms of the characteristic parameters of flight situation in complex low-altitude airspace, in such a way to provide the theoretical basis for scientific surveillance of the flight safety with respect to complex low-altitude airspace operation.
Flight behavior modeling and simulation for general aircraft in complex low-altitude airspace
Based on the research requirement, some assumptions have been taken: (1) an aircraft is regarded as a mass point and its heading is the moving direction, (2) visual flight rule is applied and the response time of the pilot is not considered, (3) aircraft perceives its own surrounding aircraft information and other external environmental information in real time, (4) only two-dimensional (2D) plane flight conflict is considered, and (5) flight conflict can always be resolved by altitude adjustment.
General aircraft individual flight behavior model
Basic flight behavior model
Basic flight behavior model is used to calculate the future position of aircraft according to its current position, speed, and acceleration. The Cartesian coordinate system is set up with



In equation (3),
Flight conflict detection model
In this article, flight conflict is defined as an existing (or imminent) phenomenon that the distance between two aircraft is less than the minimum safety distance. Flight conflict detection model is used to determine whether an aircraft is in conflict with another aircraft according to their relative position.
Pre-flight conflict detection
Pre-flight conflict detection refers to the detection of existing (or imminent) conflict.
8
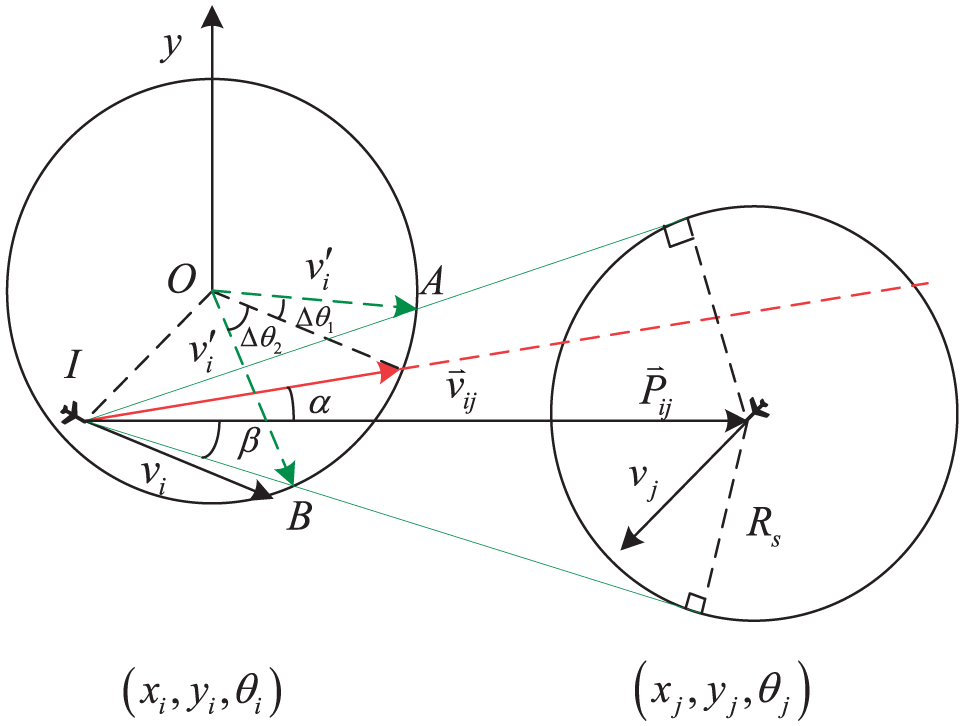
Figure 1 shows the general aircraft flight conflict detection diagram. The relative position vector




When

The flight conflict detection diagram.
Post-flight conflict detection
Post-flight conflict detection aims to guarantee the feasibility and validity of the flight conflict resolution strategy. In Figure 1, for example, assume that the conflict resolve time from

Flight conflict resolution model
Flight conflict resolution model is used to calculate the conflict resolution solution through speed adjustment, heading adjustment, or altitude adjustment. There are various types of flight conflict in low-altitude airspace and can be summarized into two categories: non-aircraft conflict (between aircraft and non-aircraft) and aircraft conflict (between two aircrafts).
Obstacle avoidance model
The model is suitable for non-aircraft conflict resolution (such as with terrain obstacles and bad weather area). As shown in Figure 2, the model adopts the artificial potential field method. 21 When an aircraft is in conflict with non-aircraft, the target produces gravitational force to the aircraft, which can be calculated as formula (9)


Obstacle avoidance model.
The repulsion force of the obstacle to the aircraft

The repulsion force of the target to the aircraft

The repulsion force to the aircraft

The resultant force can be expressed as

In equations (9)–(12),
Tailing conflict resolution model
Tailing conflict resolution model is suitable for the conflict caused by higher speed of the tailing aircraft to the front aircraft on a same flight path, as shown in Figure 3.

Tailing conflict resolution model.
Assume that the front aircraft

Constraint of acceleration aj is as follows

Assume that the front aircraft


Constraints of acceleration aj can be expressed as follows

Head-to-head conflict resolution model
Head-to-head conflict resolution model is suitable for the conflict in which two aircrafts fly head-to-head to each other. As shown in Figure 4, assume the distance between aircrafts


Head-to-head conflict resolution model.
Conflict resolution model based on speed adjustment
As shown in Figure 5, according to the relative movement theory, conflict can be resolved by adjusting speed of aircraft

Conflict resolution model based on speed adjustment.
Before speed adjustment, the angle between the relative position vector

The target speed of aircraft

or

Conflict resolution model based on heading adjustment
As shown in Figure 6, according the relative movement theory, the conflict can be resolved by adjusting the heading of aircraft
Conflict resolution model based on heading adjustment.
Assume that speed is unchanged while adjusting heading. Let
Similarly, the target heading of aircraft i can be calculated as follows

Conflict resolution model based on altitude adjustment
Assume that the current altitude of aircraft i is
General aircraft group flight behavior model
Tour flight, business flight, transportation flight, and emergency rescue flight are selected as the typical general aviation activities, and the conflict resolution rules for complex low-altitude operation with the four activities are proposed.
Basic flight rule
Two head-to-head aircrafts at a same altitude should turn right to avoid each other and keep at least 500-m interval; horizontal interval between aircraft at same altitude should be no less than minimum safety interval; minimum vertical interval of aircraft is 300 m; and aircraft with no conflict should avoid aircraft with conflict.
Priority rule
Assume that under normal flight conditions, the priority rule is given as follows: emergency rescue flight > business flight > transportation flight > tour flight; aircraft with conflict is prior to aircraft with no conflict; low-priority aircraft should avoid high-priority aircraft.
Priority of conflict resolution strategy
Speed adjustment has the least fuel consumption and aircraft can maintain on the original flight path with least influence to other aircraft. Heading adjustment has the medium fuel consumption and influences aircraft in one flight level. Altitude adjustment has the largest fuel consumption and may lead to congestion in several flight levels. Considering the safety and economy cost of aircraft,7,21,22 the priority of the three strategy is defined as: speed adjustment > heading adjustment > altitude adjustment. Note that priority of conflict resolution strategy is considered in condition that basic flight rule is satisfied.
Multi-aircraft conflict resolution rule
In multi-aircraft conflict scenario, conflicts are resolved according to priority rule and priority of conflict resolution strategy. In the special case that two aircraft are conducting conflict resolution behavior while a third aircraft gets involved, the third aircraft will change altitude to resolve the conflict.
In summary, the general aviation multi-flight behavior logic framework is shown in Figure 7.

The general aviation multi-flight behavior logic framework.
Individual interaction behavior model based on Agent
Low-altitude environment Agent and general aircraft Agent are constructed based on Agent-based modeling and simulation (ABMS) method. 23
Low-altitude airspace environment Agent
Low-altitude airspace environment Agent mainly includes information storage module and communication interaction module. Information storage module is used to store airfield structure information such as the location of the airport or temporary landing point, range of control airspace, airspace structure nodes, and other flight-related information such as location of terrain or artificial obstacle; communication interaction module is used for communication between low-altitude airspace environment Agent and other Agents.
General aircraft Agent
General aircraft Agent mainly includes information module, conflict detection module, flight control module, and communication module. Information module is used for collecting and processing of external environment information, as well as storing and analyzing the state information of its own; conflict detection module is used to identify and category flight conflict; flight control module is used for the selection of conflict resolution strategy and the control of corresponding flight behavior; and communication module is used to transfer information to other Agents.
Figure 8 is the general aircraft Agent behavior control structure diagram.
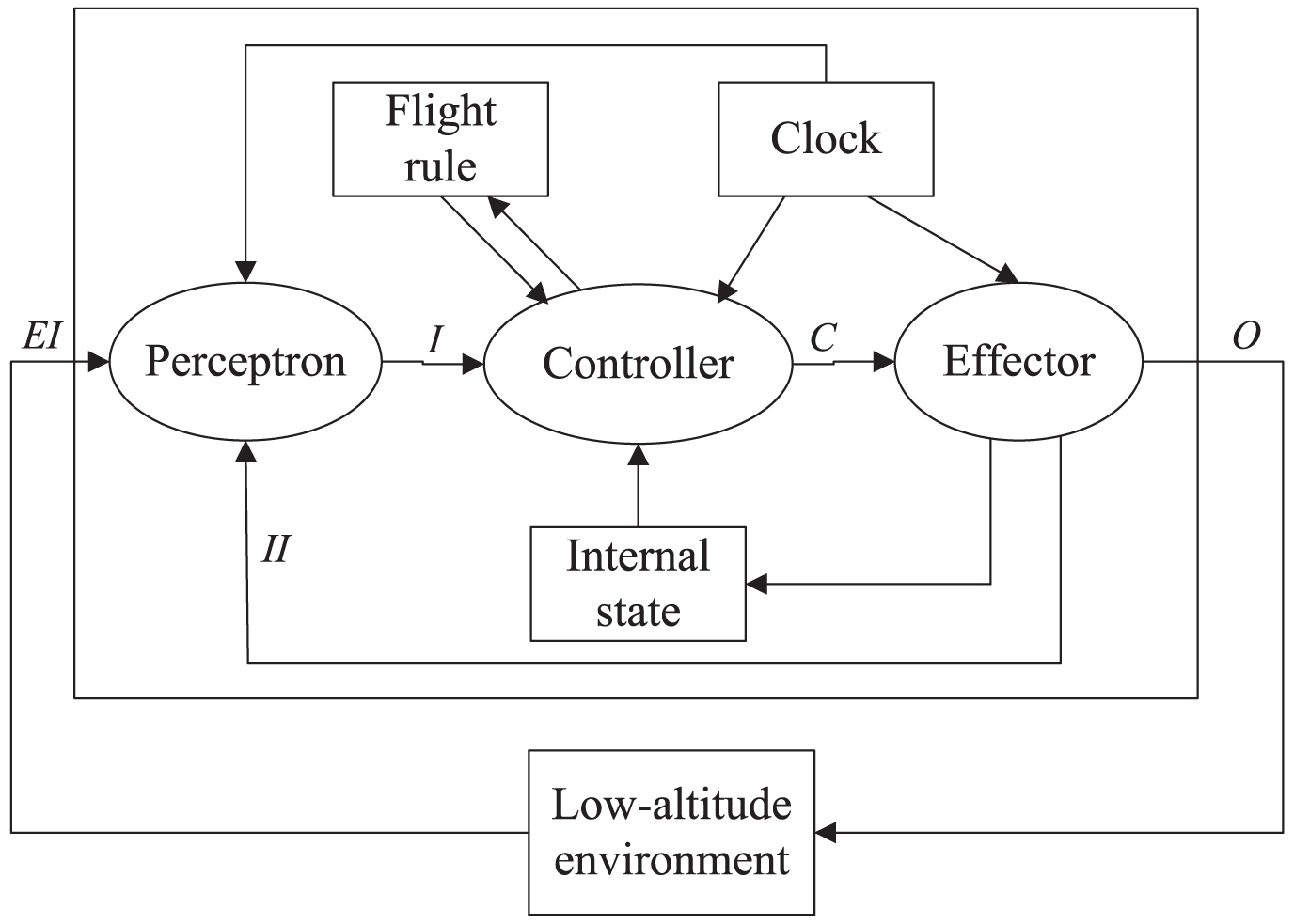
General aircraft Agent behavior control internal structure.
Simulation platform based on NetLogo
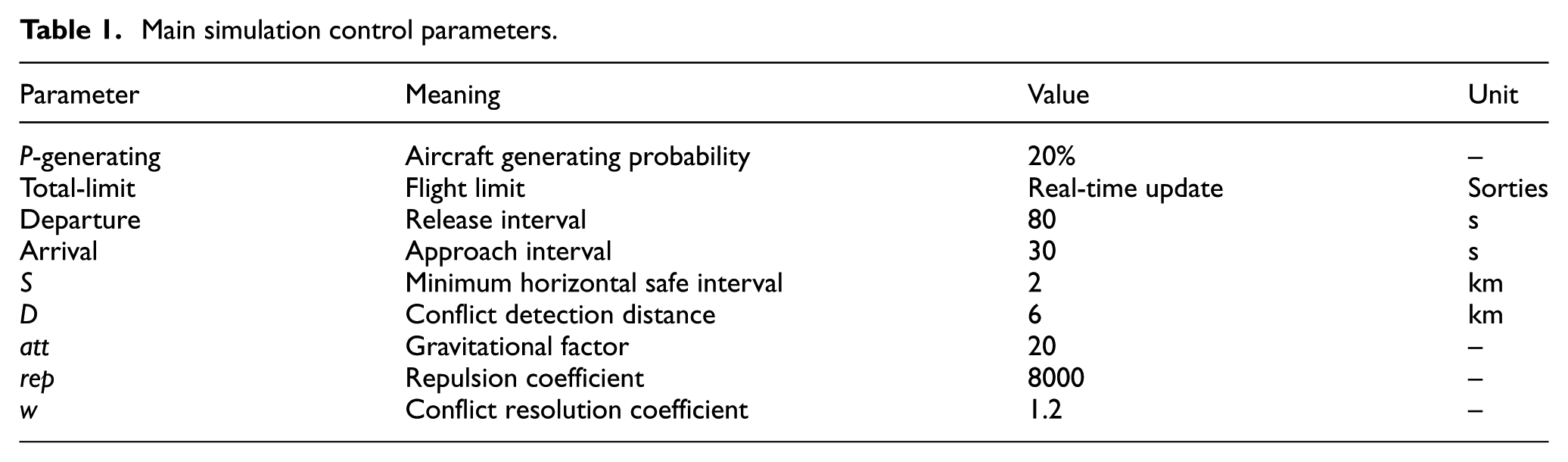
According to the regulations of low-altitude airspace and a particular case of general aviation airport, the complex low-altitude simulation operation environment is set up as shown in Figure 9 and Tables 1 and 2, and a complex low-altitude flight situation simulation system based on NetLogo platform is built.

Complex low-altitude simulation operation environment.
Main simulation control parameters.
Performance of typical general aircraft.

Definition of flight situation safety indicators
In order to objectively and accurately characterize the complex low-altitude flight situation safety, the following indicators are defined:
Flight volume
Total conflicts


In equations (23) and (24),
Conflict time

In equation (25),
Number of altitude adjustments


In equations (26) and (27),
Average separation

In equation (28),
Average speed-change

In equation (29),
Average heading-change

In equation (30),
Results and discussion
Relationship of flight volume to total conflicts and conflict time
Relationship of flight volume to total conflicts
As shown in Figure 10, the amount of total conflicts presents an overall trend of increasing as the flight volume increases. When the flight volume is less than 20, number and density of aircraft are small, aircraft distribution is scattered, the amount of total conflicts is less than 5, and fight situation safety is high; when the flight volume increases from 20 to 80, aircraft density increases and the probability of flight conflict also increases, the amount of total conflicts increases to 20, and flight safety is poor. When the flight volume continues to increase, airspace becomes crowded due to large density, the amount of total conflicts increases to 35 with an increasing growth rate, and flight safety is seriously affected.

Simulation result of flight volume to total conflicts: (a) raw data and (b) fitting result.
Relationship of flight volume to conflict time
By processing the raw data in Figure 10(a), conflict time per half an hour under each flight volume is obtained as shown in Figure 11. It can be observed that conflict time presents an overall increasing trend with the growth of flight volume. When the flight volume is less than 20, the amount of flight conflicts is quite low, so the conflict time is although in low value. When the flight volume increases from 20 to 80, as aircraft density increases, the difficulty and time of conflict resolution increase. When the flight volume continues to increase, conflict time shows a rapid growth, which indicates that the probability of the flight conflict occurred in the low-altitude airspace greatly increases, and the low-altitude airspace has reached its capacity, aircraft cannot resolve flight conflict effectively.

Fitting chart of flight volume to conflict time.
Relationship of average separation to flight volume
As shown in Figure 12, the average separation of the aircraft tends to stabilize after initial decrease with the growing of flight volume. When the flight volume is in low value (<20), density of aircraft is low with little interaction between aircraft, so average separation fluctuates in a large margin, but the overall trend is decreasing with the growth of the flight volume. As flight volume continues to increase, aircraft density also increases causing stronger restriction between aircraft, leading to the stabilization of average separation around a certain value (75 km).

Simulation raw data of flight volume to average separation.
Relationship of number of altitude adjustments to flight volume and total conflicts
Relationship of number of altitude adjustments to flight volume
As shown in Figure 13, the number of altitude adjustments in the low-altitude airspace has an overall increasing trend with the growing of flight volume. In order to demonstrate the trend more clearly, the average number of altitude adjustments in each flight volume is calculated as shown in Figure 13(b). We can see that when the flight volume is less than 20, there is no altitude adjustment; when the flight volume increases from 20 to 80, the average number of altitude adjustments is less than 0.5 with an increasing trend; as the flight volume continues to increase, the average number of altitude adjustments increases with a higher rate approaching to 1.

Simulation data of flight volume to number of altitude adjustments: (a) raw data and (b) fitting result.
Relationship of number of altitude adjustments to total conflicts
As shown in Figure 14, the number of altitude adjustments increases with the increase in the total conflicts. When the total conflicts is less than 5, the number of altitude adjustments is 0, conflict resolution is conducted by speed adjustment or heading adjustment strategy; when the total conflicts is 5–24, the number of altitude adjustments increases slowly, which indicates that most aircraft could still conduct conflict resolution through speed adjustment or heading adjustment strategy; when the total conflicts continues to increase, the number of altitude adjustments shows a sharp increase, which indicates that the low-altitude airspace is congested and aircrafts are forced to resolve conflict with altitude adjustment.

Total conflicts to number of altitude adjustments.
Relationship of average speed-change to flight volume
As shown in Figure 15, the average speed-change increases with the initial growth of flight volume, but turns to decrease with the continue increase in the flight volume. When the flight volume is less than 15, there is almost no flight conflict in the low-altitude airspace and little average speed-change of aircraft. When the flight volume is 15–100, the flight density in the low-altitude airspace increases, closer distance of conflict aircraft requires higher value of speed-change, which leads to the increase in the average speed-change; as the flight volume continues to increase, most conflicts can no longer be resolved by speed-adjustment strategy, resulting the decrease in the average speed-change.

Simulation data of flight volume to average speed-change.
Relationship of average heading-change to flight volume
As shown in Figure 16, with the growth of flight volume, average heading-change increases first and then tends to stabilize. When the flight volume is less than 10, there is little flight conflict, the average heading-change is almost 0; when the flight volume is 10–80, with the increase in the flight volume, conflict aircraft are required to steer more while conducting heading adjustment, resulting in the increase in the heading-change. As the flight volume continues to increase, most conflict aircraft turn to select altitude adjustment strategy, so the average heading-change gradually stabilizes as the flight volume increases. Then, we proposed the analysis on the Influence of Flight Situation Safety. It can be observed that most data values are above a certain value (about 20), and this is due to that most heading-change conflict resolutions happen in head-to-head occasions, and with a certain value of conflict detection distance

Simulation data of flight volume to average heading-change.
Influence of conflict detection distance on flight situation safety
With other simulation parameters remaining unchanged, flight conflict detection distance of 3, 4, 5, and 6 km are selected to explore the influence of flight conflict detection distance on the low-altitude flight situation safety.
Comparative analysis of total conflicts and conflict time
As shown in Figure 17, the change of flight conflict detection distance does not affect overall trend of total conflicts and conflict time with the growth of flight volume. However, under a same flight volume, the total conflicts and the conflict time are in higher values with greater flight conflict detection distance. When the flight volume is fixed, greater flight conflict detection distance means higher probability of detecting flight conflict, which results in the increase in the total conflicts; in addition, with the increase in the flight conflict detection distance, aircraft have greater distance to each other when conflict is detected, which means costing more time to resolve the conflict.
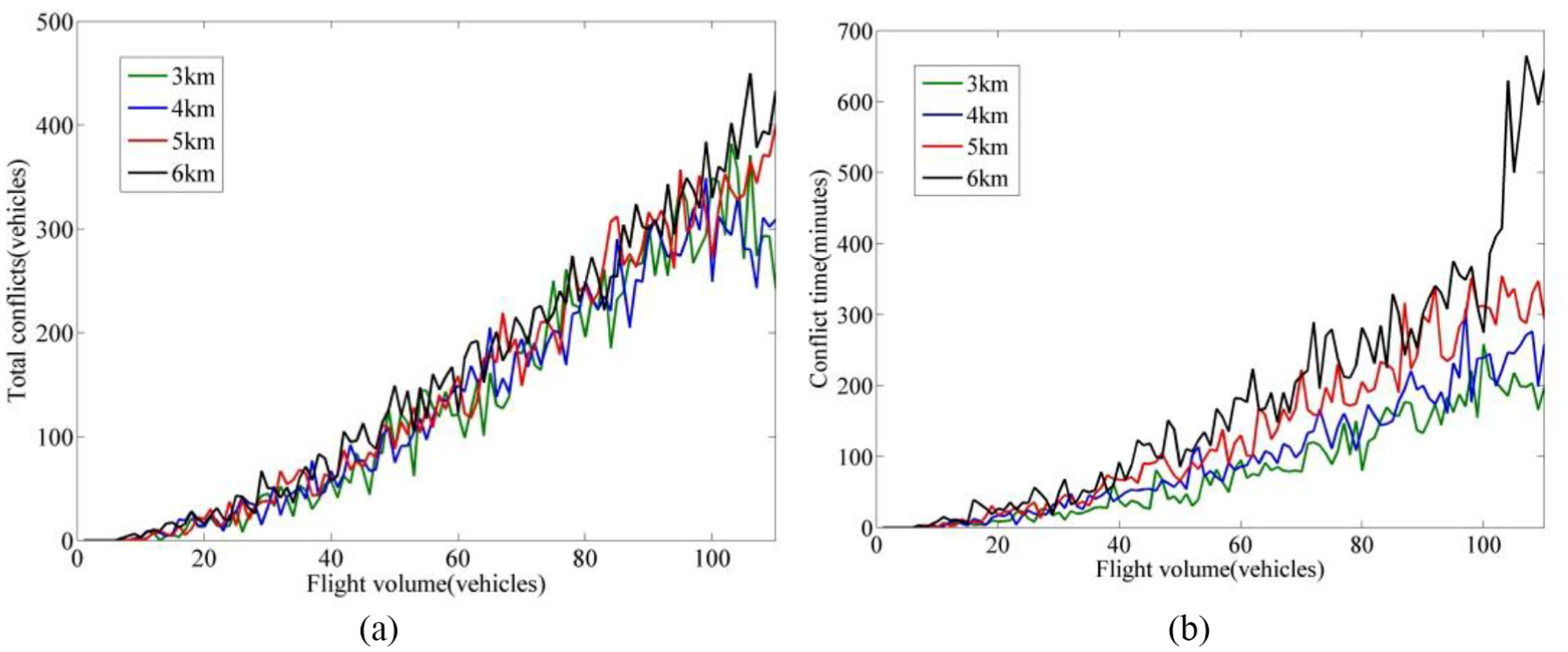
Simulation results of flight volume to total conflicts and conflict time under different conflict detection distances:(a) flight volume to total conflicts and (b) flight volume to conflict time.
Comparative analysis of average speed-change
As shown in Figure 18, the overall trend of average speed-change remains unchanged with different settings of flight conflict detection distance. However, with greater flight conflict detection distance, the average speed-change fluctuates in a larger margin with the growth of flight volume. The average speed-change increases with the initial growth of flight volume, but turns to decrease with the continued increase in the flight volume. With greater flight conflict detection distance, the decrease trend appears earlier with the growth of flight volume.

Simulation results of average speed-change under different conflict detection distances.
Comparative analysis of average heading-change
As shown in Figure 19, different settings of flight conflict detection distance does not affect the overall trend of flight volume to average heading-change; however, with the increase in the flight conflict detection distance, the average heading-change fluctuates in smaller margin.

Simulation results of average heading-change under different conflict detection distances.
When flight volume is fixed, a greater flight conflict detection distance means aircrafts detect conflict in a greater distance, and smaller heading-change is required to resolve head-to-head or convergence conflict. However, a greater flight conflict detection distance also leads to less no-conflict aircraft in airspace and results in earlier airspace congestion and stabilization of average heading-change as flight volume increases.
Influence of safety separation on flight situation safety
With other simulation parameters remaining unchanged, safety separation of 1, 2, 3, 4, and 5 km are selected to explore the influence of safety separation on the low-altitude flight situation safety.
Comparative analysis of total conflicts and conflict time
As shown in Figure 20, the change of minimum horizontal safety separation does not affect the overall trend of total conflicts and conflict time with the growth of flight volume.
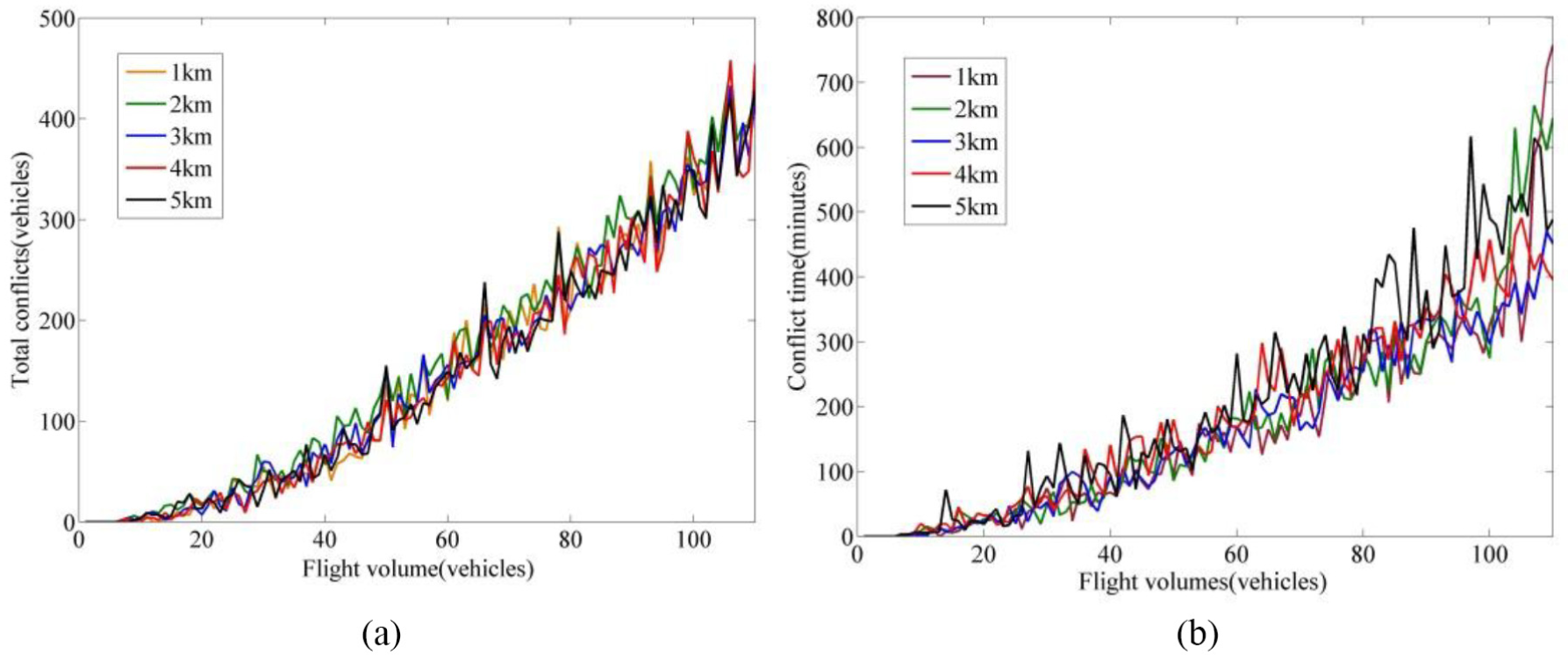
Simulation results of flight volume to total conflicts and conflict time under different safety separations: (a) total conflicts and (b) conflict time.
When the spatial distribution of aircraft in airspace is fixed, setting different minimum horizontal safety separations does not affect the total conflicts, but influences the selection of conflict resolution strategies, resulting in different conflict times, and this difference becomes more obvious as flight volume increases.
Comparative analysis of number of altitude adjustments
As shown in Figure 21, the change of minimum horizontal safety separation does not affect the overall trend of number of altitude adjustments with the growth of flight volume. When the flight volume is fixed, larger horizontal safety separation means less resolution freedom left for aircraft to do conflict resolution by speed adjustment or heading adjustment strategy, which results in the increase in the number of altitude adjustments, and this difference is more obvious as flight volume increases.
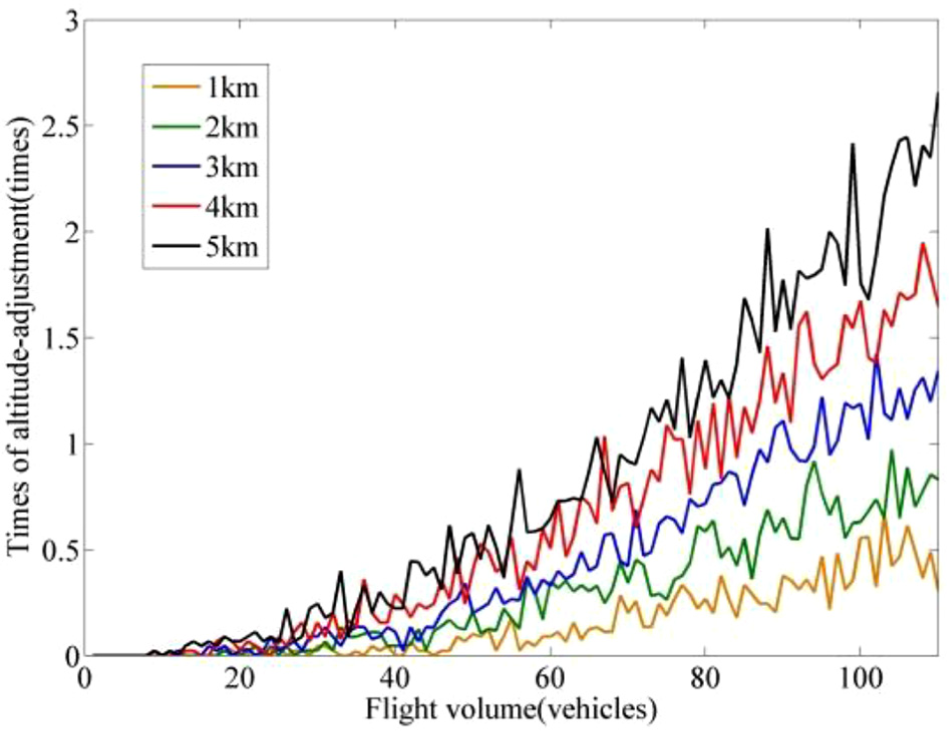
Simulation results of flight volume to number of altitude adjustments under different safety separations.
Comparative analysis of average heading-change
As shown in Figure 22, the change of minimum horizontal safety separation does not affect the overall trend of average heading-change with the growth of flight volume. However, as the minimum horizontal safety separation increases, average heading-change fluctuates in smaller margin. With larger minimum horizontal safety separation, aircrafts are required to make larger heading-change to resolve head-to-head or convergence flight conflict, so the peak values of heading-change vary greatly with different flight volumes.
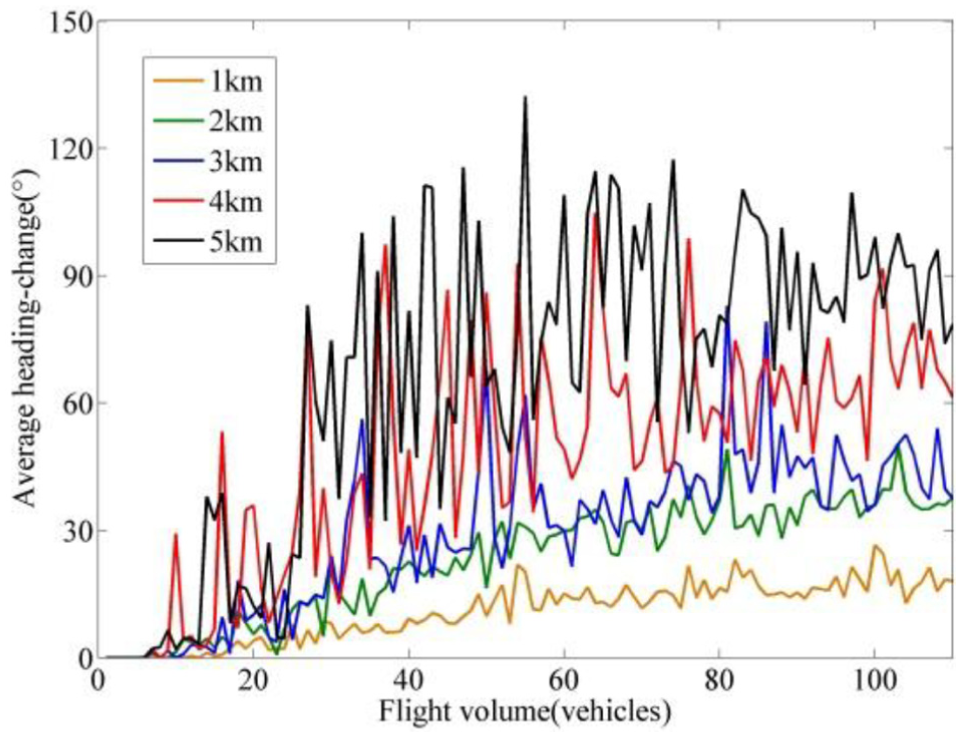
Simulation results of flight volume to average heading-change under different safety separations.
Influence of general aviation activities on flight situation safety
With a fixed flight volume of 80, 29 different mixing ratios of four typical general aviation aircraft are set (see Table 3, where 1:1:1:1 represents the ratio of transportation flight, tour flight, business flight, and emergency flight) to explore the impact of general aviation activities on flight situation safety.
29 different mixing ratios of general aviation activities.

As shown in Figure 23, different mixing ratios of general aviation activities have significant impact on low-altitude flight situation safety. When the mixing ratio is 4:3:2:1, the total conflicts is 162 and the conflict time is 216 min, and the overall safety level of low-airspace operation is generally high; when the ratio is 1:3:2:4, the total conflicts is 286, the conflict time is 533 min, and the overall safety level of low-airspace operation is very low. Therefore, a reasonable setting of mixing ratio of general aviation activities helps to reduce the potential interaction between general aviation activities and improves the safety level of low-altitude airspace operation.
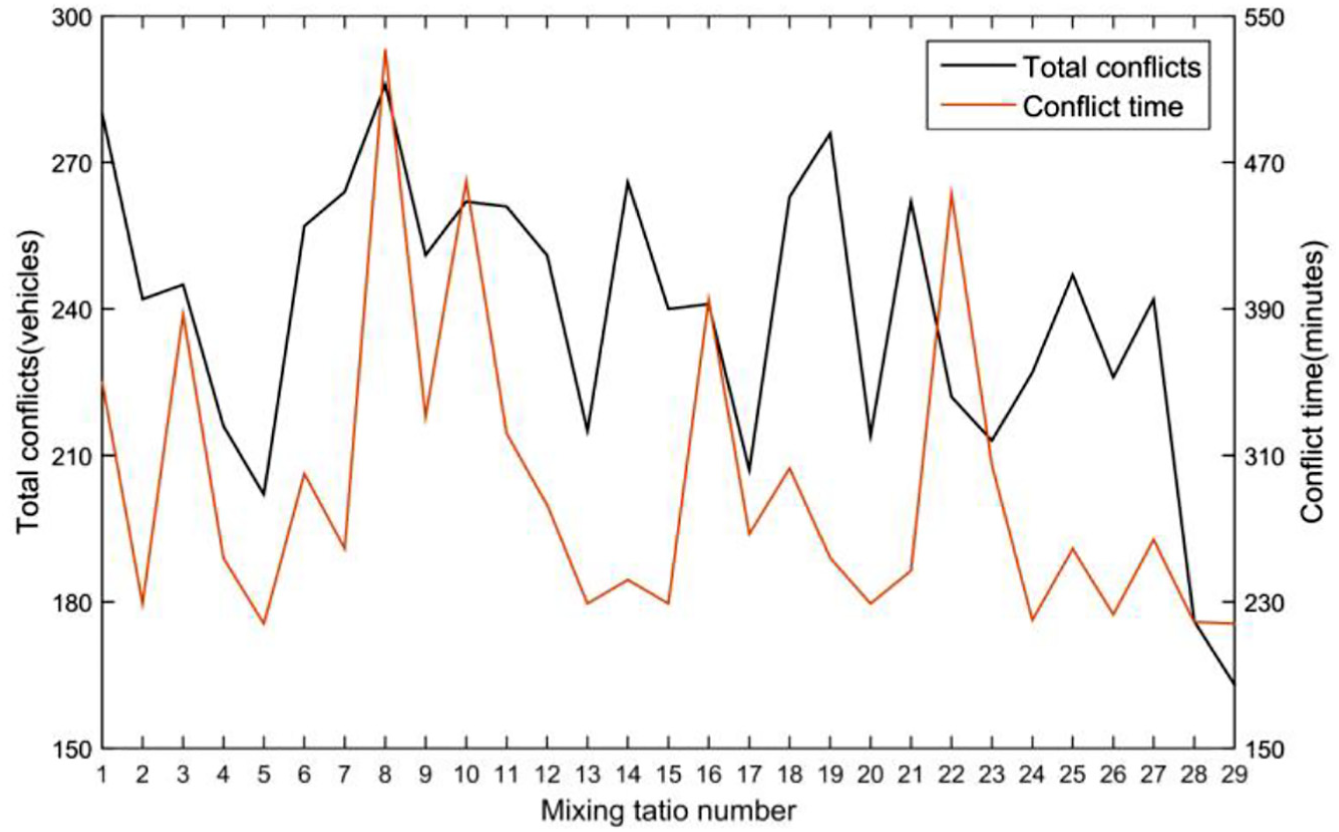
Simulation result of different mixing ratios.
Conclusion
This article focuses on the safety characteristics of complex low-altitude mixed flight situation by means of mathematical modeling and simulation analysis, the relationships among the flight situation indicators are preliminarily revealed, and the influences on flight situation safety are analyzed. Conclusions have been drawn as follows: (a) the proposed general flight behavior model, multi-flight behavior model, and individual interaction behavior model can effectively reflect the characteristics of complex low-altitude flight operation; (b) it helps to improve the safety level of complex low-altitude flight operation by setting reasonable conflict detection distance and safety separation.
This article just focuses on analyzing the safety characteristics of complex low-altitude flight situation. Further research could focus on analyzing the other aspects of characteristics of complex low-altitude flight, such as efficiency and environmental impact characteristics. Those researches will contribute to reveal the spatial–temporal characteristics of general aviation flight situation and make good use of the low-altitude airspace resources.
Footnotes
Handling Editor: Gang Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant 61573181 and the Fundamental Research Funds for the Central Universities under grant NJ20160014.