
Abstract
A novel adaptive fuzzy control approach with low computational costs is addressed for the longitudinal non-affine model of a generic hypersonic vehicle subject to parametric uncertainties, capable of guaranteeing that altitude and velocity tracking errors exhibit prescribed performance. A new performance function is devised to impose preselected bounds on the transient and steady-state tracking error performance, and then a transformed error is constructed, which converts the original “constrained” system into an equivalent “unconstrained” one for the simplicity of control designs. Furthermore, a simplified fuzzy controller is exploited for the altitude subsystem, eliminating the issue of “explosion of complexity” that is associated with back-stepping control. For the velocity subsystem, a prescribed performance-based proportional–integral controller is utilized. The special contributions of the proposed control strategy are that it can guarantee altitude and velocity tracking errors with desired transient and steady-state performance, and meanwhile the computational load is quite low. Finally, numerical simulation results are presented to verify the efficiency of the design.
Introduction
Hypersonic vehicles (HVs) have been regarded as a reliable solution to making access to near space affordable, as witnessed by the NASA’s successful flight tests of the scramjet-powered X-43A and X-51A.1–3 Due to the tightly integrated airframe and varying flight environments, the HV’s motion model is uncertain, nonlinear, non-affine, and coupled, which yields unprecedented challenges for control system designs.4–6 Moreover, because of the hypersonic flight, excellent transient performance and low computational loads are needed for HV’s control systems to achieve satisfactory controlling accuracy.7–9
Recently, most control methodologies presented to date have been limited in their scope to the longitudinal dynamics of HVs.10–12 To handle the issue of robustness against parametric uncertainties, a robust L∞-gain controller is developed for the longitudinal motion model of an HV subject to uncertain coefficients and external disturbances via a fuzzy system-based disturbance observer approach, providing robust tracking of velocity and altitude commands. 13 In a study by Wang et al., 14 a recursive terminal sliding mode control (SMC) strategy is proposed for generic HVs with measurement noises and disturbances by developing a sliding mode disturbance observer to enhance the robustness performance, which also eliminates the conservative shortcomings of traditional robust control. However, traditional SMC schemes are inadequate to deal with the flexibility effects of HVs due to the high-frequency chattering. Therefore, a high-order SMC method is studied for an HV to achieve continuous control inputs and suppress the chattering. 15 By synthesizing nonlinear disturbance observers and back-stepping designs, several improved tracking controllers are exploited for HVs with mismatched uncertainties.11,16
If the control system does not depend on accurate models, its stability robustness with respect to uncertainties and disturbances will be satisfactory. 10 Thus, neural networks and fuzzy systems are applied to approximate unknown dynamics, while intelligent control approaches with sufficient robustness are investigated for HVs.17–21 For the attitude dynamics of an HV described by Takagi–Sugeno (T-S) fuzzy models, a fault-tolerant controller is proposed and adaptive laws are designed for the optimal parameter vectors of T-S fuzzy systems for the sake of guaranteeing estimation precision. 17 By supposing that the signs of control gains are known in advance, several neural systems are utilized to estimate the unknown nonlinearities of an HV, and online learning laws are developed for the desired weight vectors of neural networks using parameter projection technologies, based on which a global neural controller is constructed for an HV. 19 Differently, neural networks are employed to approximate the addressed back-stepping controllers instead of unknown functions, while a direct neural control law is presented for an HV and the singular problem is averted. 22
In spite of the recent progress in the control of HVs, many issues still exist: (1) the previous studies can only ensure the control system with stead-state performance by limiting tracking errors to bounded values when the time t→+∞, but efforts in guaranteeing its transient performance are lacking; (2) the methodologies mentioned above are derived from affine models of HVs, which may be inappropriate for actual HVs considering the fact that HVs’ models are completely non-affine; and (3) the existing fuzzy and neural control approaches containing too many online learning parameters that arose from complicated adaptive laws lead to computational burden, making them inapplicable for hypersonic flight control. In view of the above discussions, this article investigates a novel fuzzy control strategy with prescribed performance for the non-affine model of an HV to steer altitude and velocity to follow their reference trajectories, while guaranteeing tracking errors with desired transient and steady-state performance. The main contributions are summarized as follows:
A new fuzzy prescribed performance control scheme independent on accurate initial tracking errors is addressed for an HV to ensure the tracking errors with satisfactory stead-state, especially transient, performance.
Unlike the current affine control methods, the exploited non-affine model-based controller avoids model simplifications.
Only one fuzzy system is employed to approximate the lumped uncertainty, and also only one learning parameter is required, which leads to a low-computational load design.
A Nussbaum-type function is utilized to remove the strict assumptions that the signs of unknown control gains have to be known in advance.
The rest of this article is organized as follows. In section “HV model and preliminaries,” the HV model and preliminaries are presented. The controller is designed in section “Controller design” and the simulation results are depicted in section “Simulation results.” Finally, section “Conclusion” shows the conclusions.
HV model and preliminaries
HV model
Consider the longitudinal dynamic model of an HV, formulated as 23







where V, h, γ, θ, and Q represent the velocity, altitude, flight path angle, pitch angle, and pitch rate, respectively; η1 and η2 are the flexible states. The thrust force T, the drag force D, the lift force L, the pitching moment M, the first generalized force N1, and the second generalized force N2 are defined as 23






In the above HV model, the control inputs Φ and δe, representing the fuel equivalence ratio and elevator angular deflection, respectively, occur implicitly in equations (1)–(7) through T, D, L, M, N1, and N2. For more detailed definitions of the other variables and coefficients, the reader could refer to Parker et al. 23 or Notation.
The pursued design goal is to let h and V track their commands href and Vref, respectively, despite model uncertainties by exploiting fuzzy approximation-based prescribed performance controllers Φ and δe. Meanwhile, altitude and velocity tracking errors are limited within preselected bounds to guarantee transient and stead-state performance.
Remark 1
Noting the fact that the flexible states η1 and η2 are unmeasured, only the rigid body states V, h, γ, θ, and Q are used for control design. For η1 and η2 that are treated as unknown uncertainties according to current studies,8–12 the addressed controller’s robustness will handle them via fuzzy approximation.
Remark 2
From equations (1)–(5) and the definitions of T, D, L, M, N1, and N2, it is obvious that the HV model is completely non-affine in the control inputs. Hence, this model is inappropriate to be simplified as an affine one by removing some significant features of the model under strict assumptions. For this reason, the subsequent control designs are processed using the originally non-affine model of an HV without any simplification.
Preliminaries
The following preliminaries are used to initialize the subsequent developments.
Definition 1
The function

Lemma 1
Define

where
Lemma 2 (Implicit function theorem)
Assume that
Lemma 3 (Mean value theorem)
Suppose that

Lemma 4 (Young’s inequality)
For

with
It is proved that the fuzzy system can be used to approximate a continuous function

where

Lemma 5
For a continuous function

Controller design
Altitude controller design
This subsection shows the design process of prescribed performance controller for the altitude subsystem (2)–(5) such that h tracks its reference trajectory href with altitude tracking error satisfying the preselected transient performance.
Define altitude tracking error

where
Notice that
Theorem 1
If the transformed error
Proof 1
The boundedness of

Then, we further have

Since

That is,
Remark 3
It is concluded from Theorem 1 that both the transient and stead-state performance of
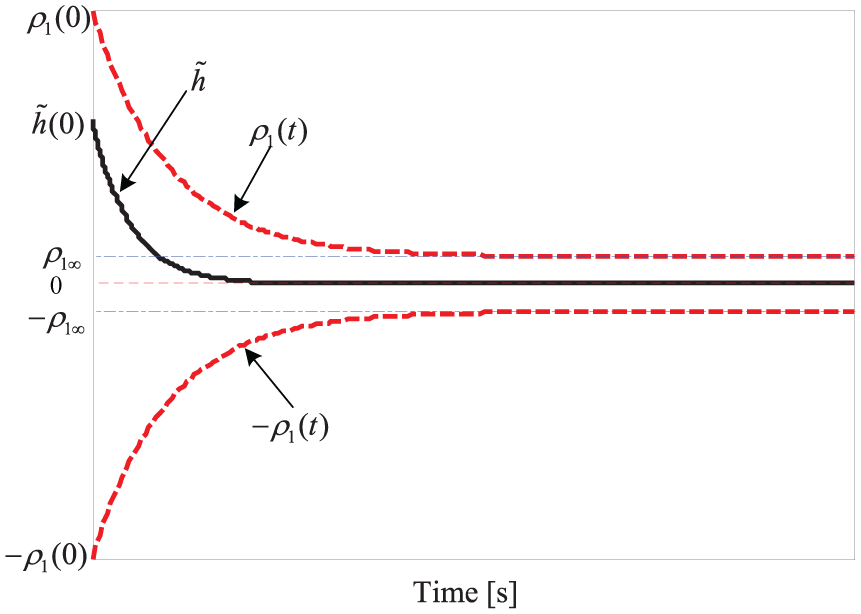
Graphical presentation of the prescribed performance for
We choose the reference trajectory of γ as

where
If γ→γd, the corresponding dynamics for

It is clear that
In what follows, a low-computational load fuzzy control law will be developed to make γ→γd.
Define

where the continuous functions
Defining

Furthermore, defining

with
Thus, a pure feedback non-affine model is derived from equation (21)

where
Assumption 1
It is assumed that
Remark 4
Assumption 1 imposes the global controllability condition on equation (24) and also is the satisfying condition of Lemma 2. Unlike other works22,29 needing that the control gain
Remark 5
It is apparent that compared with equation (21) the formulation of equation (24) is simpler. On the basis of equation (24), there is no need of complicated recursive design process of back-stepping, while a lower complexity design than the one of Bu et al. 22 is achieved.
Define the tracking error e and error function E as

with
The time derivative of E is given by

Based on Lemma 2 and Assumption 1, we know that there exists a

Using Lemma 3 leads to

where
Based on equations (27) and (28), we have

For the unknown term

where
Define

where

with
Theorem 2
Consider the closed-loop system consisting of non-affine plant (equation (24)), controller (equation (31)), and adaptive law (equation (32)) under Assumption 1. Then, all the signals involved are bounded.
Proof
Consider the following Lyapunov function

with
Taking the time derivative of equation (33), we obtain

Substituting equations (29), (30), and (32) into equation (34) yields

with
Considering equation (31) and

Adding and subtracting

From the fact that

Let

with

Using multiplication of equation (39) by

Integrating equation (40) over [0, t], we have

Based on Lemma 1, we know that
Remark 6
Theorem 2 shows that the proposed altitude controller can let γ→γd, which guarantees the boundedness of
Remark 7
It is noted that there are only one fuzzy system and one learning parameter
Velocity controller design
Considering the simpleness of velocity dynamics, a proportional–integral (PI) controller is chosen for it

with

where
It is inferred that the boundedness of
Simulation results
In this section, a numerical simulation is presented to test the effectiveness of the addressed control approach. The membership functions of the fuzzy system are chosen as
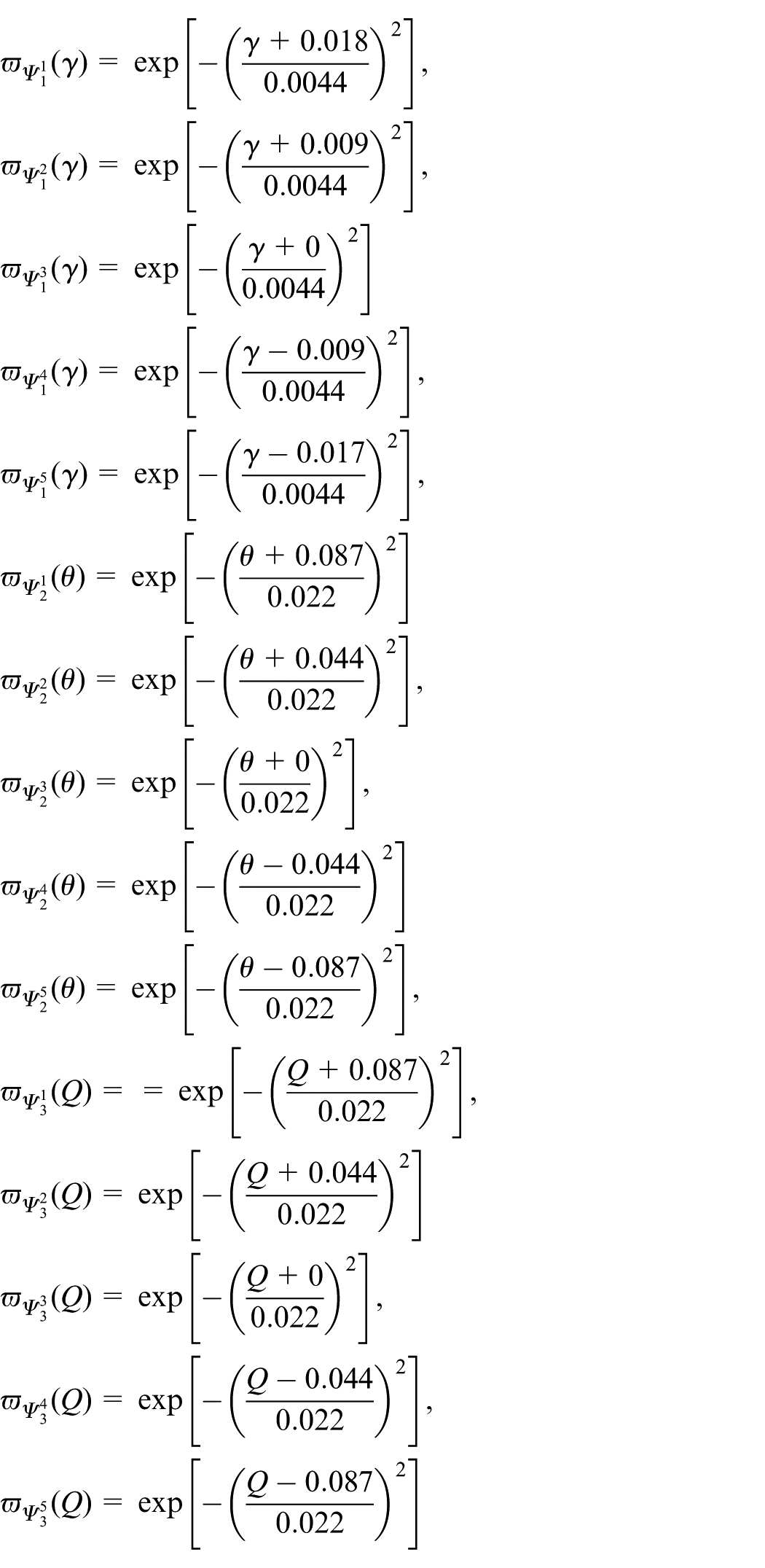
The performance functions are designed as

where C is the value of uncertain coefficient and C0 denotes the nominal value of C. In this way, parameter uncertainty up to 40% of the nominal value is taken into consideration.
To show superiority, the proposed fuzzy prescribed performance controller (FPPC) is compared with an improved neural back-stepping controller (INBC) developed in Bu et al.
30
The simulation results are presented in Figures 2–13. The altitude and velocity tracking performance, depicted in Figures 2–5, infers that the proposed FPPC can provide better transient and stead-state performance for tracking errors than by INBC; meanwhile, INBC’s robustness against parametric uncertainties is also satisfactory. Figures 6–12 reveal that for both controllers the attitude angles, flexible states, and control inputs are bounded and without high-frequency chattering. The estimation of
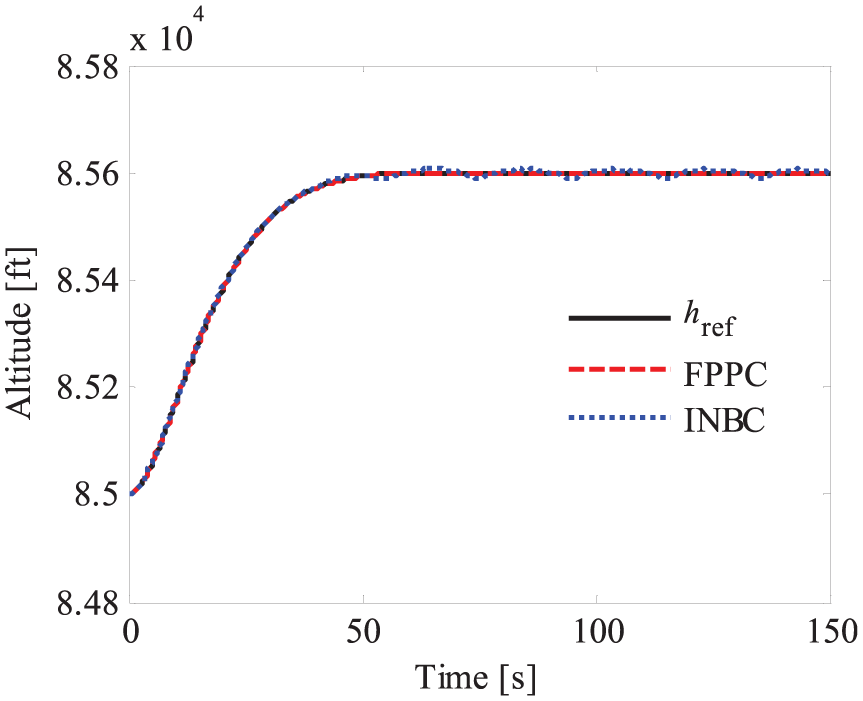
Altitude tracking.
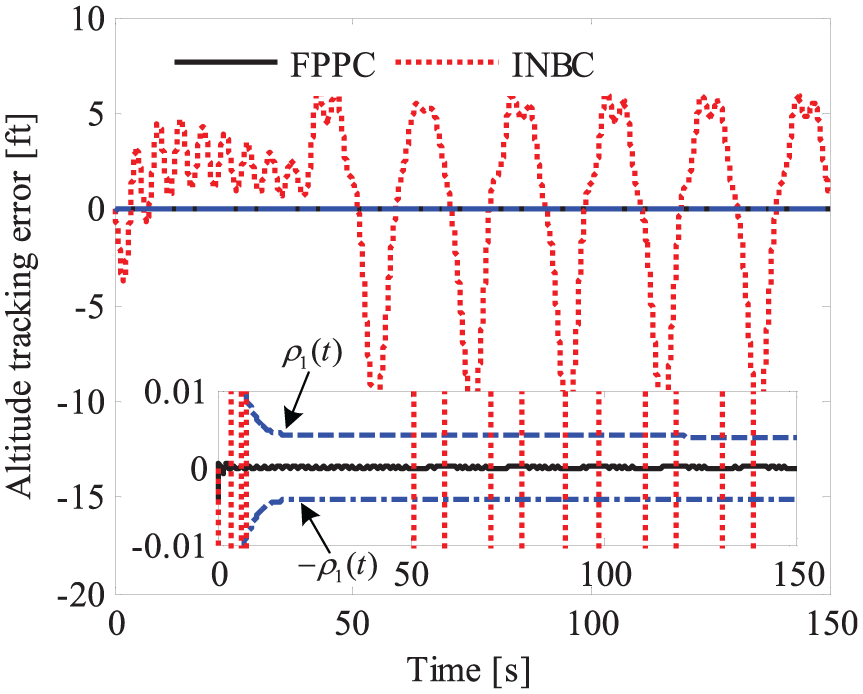
Altitude tracking error.
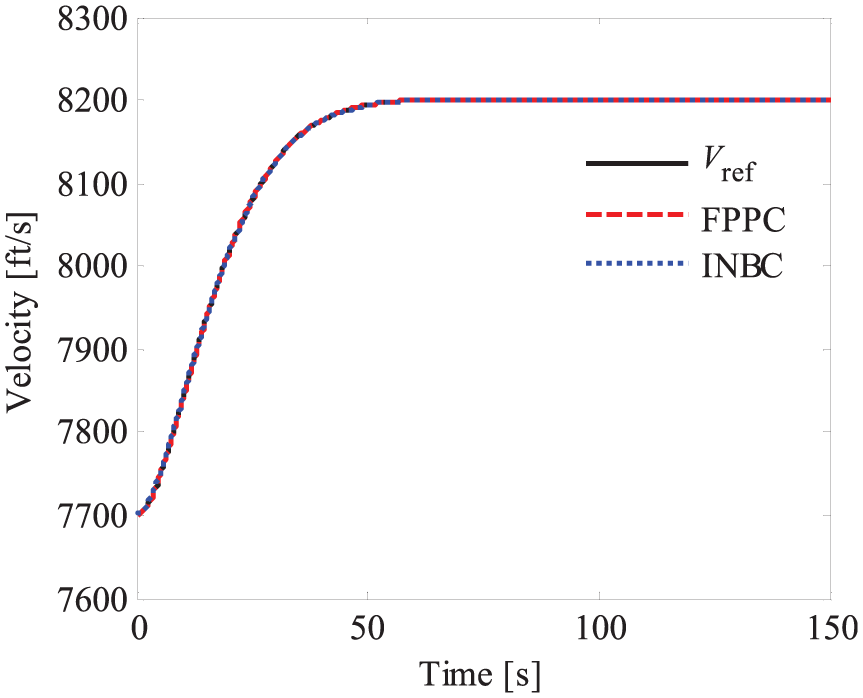
Velocity tracking.

Velocity tracking error.

Flight path angle.

Pitch angle.

Pitch rate.

The flexible state η1.

The flexible state η2.

Elevator angular deflection.

Fuel equivalence ratio.

The estimation of
Conclusion
This article investigates adaptive fuzzy control of generic HVs with prescribed performance. New performance functions are established to force altitude and velocity tracking errors to satisfy transient and stead-state performance. Transformed errors are devised to facilitate the control system design. For the altitude dynamics, a novel adaptive fuzzy prescribed performance controller is proposed without needing accurate initial tracking errors, while avoiding the complex recursive design procedure of back-stepping. Finally, simulation results from a non-affine HV model demonstrate that the presented control method can provide robust tracking of altitude and velocity reference commands and can guarantee the tracking errors with desired transient and stead-state performance. Our further works are focused on actuator fault control31–34 designing for HVs with external disturbances and eliminating the low-frequency chattering of attitude angles and control inputs.
Footnotes
Appendix 1
Handling Editor: Xiang Yu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant Nos 61603410, 61703424, and 61703421) and Young Talent Fund of University Association for Science and Technology in Shaanxi, China (Grant No. 20170107).