
Abstract
Achieving balance between robustness and performance is always a challenge in the hypersonic vehicle flight control design. In this research, we focus on dealing with uncertainties of the fuzzy control system from the viewpoint of reliability. A probabilistic robust mixed H2/H∞ fuzzy control method for hypersonic vehicles is presented by describing the uncertain parameters as random variables. First, a Takagi–Sugeno fuzzy model is employed for the hypersonic vehicle nonlinear dynamics characteristics. Next, a robust fuzzy controller is developed by solving a reliability-based multi-objective linear matrix inequality optimization problem, in which the H2/H∞ performance is optimized under the condition that the system is robustly reliable to uncertainties. By this method, the system performance and reliability can be taken into account simultaneously, which reduces the conservatism in the robust fuzzy control design. Finally, simulation results of a hypersonic vehicle demonstrate the feasibility and effectiveness of the presented method.
Introduction
Hypersonic vehicles (HVs) are envisioned to be a reliable and more cost-efficient way to access space by reducing flight time. Also, quick response and global cruise will be possible. However, flight control of HVs is more challenging since the distinctive coupling and nonlinear characteristics of the dynamics. Besides, a wide range of the flight envelope leads to unavoidable parameter variations and uncertainties, which brings about instability and performance deterioration of the flight control system.
In recent years, various techniques have been studied for dealing with parameter variations and uncertainties, such as robust control, 1 –3 adaptive control, 4 sliding mode control, 5 –8 and so on. For example, H∞ control theory was developed for the precision guidance problem by Savkin. 2 Moreover, many intelligent control techniques 9 –13 have been also proposed for the nonlinear characteristics in the flight control design. For example, Mu et al. 9 provided a method based on adaptive dynamic programing to track a desired trajectory of HV. A neural network method was given to control the hypersonic flight dynamics by Xu et al. 11 Lin 13 proposed a mixed H2/H∞ autopilot design method using fuzzy basis function networks. There also has been a rapid growing interest in the fuzzy control of the nonlinear HV systems. Especially, the control methods based on the Takagi–Sugeno (T-S) fuzzy model 14 have attracted lots of attention, 15 –20 since it is conceptually simple and effective for controlling the nonlinear HV system along the trajectory. For example, Wu et al. 16 proposed a mixed H2/H∞ fuzzy tracking control method for HVs to obtain a satisfactory anti-disturbance performance and quadratic optimal performance. However, the uncertainty was not taken into account in the modeling of HV. 16 For a practical control of HV, the robustness is important as well as performance. By regarding the uncertainties in HV system as norm-bounded perturbations, a dynamic controller of HV was obtained with robustness and a prescribed anti-disturbance performance via T-S fuzzy approach. 18 Similarly, a sufficient condition was studied to guarantee the robust stability of an adaptive fuzzy HV controller in the presence of uncertainty and disturbance. 19 The norm-bounded assumption of uncertainty makes it possible to analyze the robustness for the uncertain system by solving linear matrix inequality (LMI). However, the norm of parametric uncertainty in the HV flight system is hard to measure. Also, this kind of assumption often leads to over-conservative results, and the desirable performance level based on the deterministic worst-case scenario may not be reached.
As is known, the uncertain parameters in the HV are randomly distributed, especially for the aerodynamic coefficients. A reasonable uncertainty modeling is treating them as random variables. For the HV flight control, the probability of instability and the probability that a certain performance requirement is not meet should be reduced. In the past years, the probabilistic robust design methods based on uncertainty distribution were studied to reduce over-conservatism. 21 –24 For example, Ray and Stengel 23 measured the probability of instability via Monte Carlo sampling. Based on the sampling procedure, Wang and Stengel 24 employed the genetic algorithm optimization method to meet performance requirement with a higher probability. By randomized algorithms and Monte Carlo sampling, it is possible to trade-off between achievable performance and robustness against uncertainties. However, a sufficiently large number of simulations are needed to estimate failure probability.
In order to develop an approximate analytic method as an alternative to sampling procedure, a reliability method for robust control of uncertain linear systems was proposed by Guo. 25 –28 As is known, the robustness of system can be analyzed in terms of LMI. Inspired by the concept of structural reliability, a reliability index was utilized to measure the maximum admissible degree of expansion of the uncertain parameters when LMI holds. 25 According to the first- and second-order reliability analysis methods 29 (FORM/SORM), the failure probability corresponding to a certain performance requirement was derived from the reliability measure of an uncertain system satisfying the required performance. 26 The robust reliability method based on LMI reduces considerable computational burden. Moreover, the system performance and reliability can be considered simultaneously. For example, Zhang et al. optimized the H∞ performance under the condition that the prescribed reliability level is satisfied. 30 However, the reliability methods were developed based on the linearized model under a specific trim condition, which may not guarantee a desirable performance along the trajectory of HV. In such cases, it is more appealing to employ the T-S fuzzy control to transform the nonlinear system of HV into a set of local linear models, and then optimize the performance of HV with a prescribed reliability level based on LMIs.
In this study, a probabilistic robust mixed H2/H∞ fuzzy control method for HVs is developed by treating the uncertain parameters as normally distributed variables, where the anti-disturbance performance as well as the quadratic tracking performance of HV is optimized under the condition that the prescribed reliability level is satisfied. Initially, a T-S fuzzy model is employed for the HV nonlinear system. Subsequently, the reliability measure of fuzzy control system is described based on LMIs. Next, the probabilistic robust fuzzy controller is developed by carrying out reliability-based multi-objective LMI optimization, in which the H2/H∞ performance is optimized under the condition that the system is robustly reliable to uncertainties. Finally, a simulation study is given to illustrate the effectiveness of the proposed method.
Two contributions are made in this article. First, the control problem for nonlinear system of HV with parametric uncertainty is handled by T-S fuzzy model. Second, the reliability measure of a fuzzy control system with uncertainty is given, which makes it possible to trade-off between system performance and reliability for the fuzzy control design in terms of LMIs. By the proposed method, the conservatism in the robust design is reduced, as well as the computational complexity. The rest of the article is organized as follows: In the “Nonlinear dynamic modeling of HV with uncertainty” section, the description of HV modeling with uncertainty is given. In the “Problem formulation” section, the problem formulation is given. The “Probabilistic robust H2/H∞ fuzzy control based on reliability” section presents a probabilistic robust mixed H2/H∞ fuzzy control design method based on reliability. In the “Simulation study” section, the simulation results on the HV with randomly generated parameters are given to demonstrate the proposed method. Finally, some conclusions are drawn in the “Conclusions” section.
Notations: PT, P−1, and Tr(P) denote the transpose, inverse, and trace of any square matrix P, respectively. P > 0 denotes the positive matrix P. The notation I denotes the identity matrix of appropriate dimensions. diag{⋅} denotes the diagonal matrix. The ∗ is used in following matrix expressions as

Nonlinear dynamic modeling of HV with uncertainty
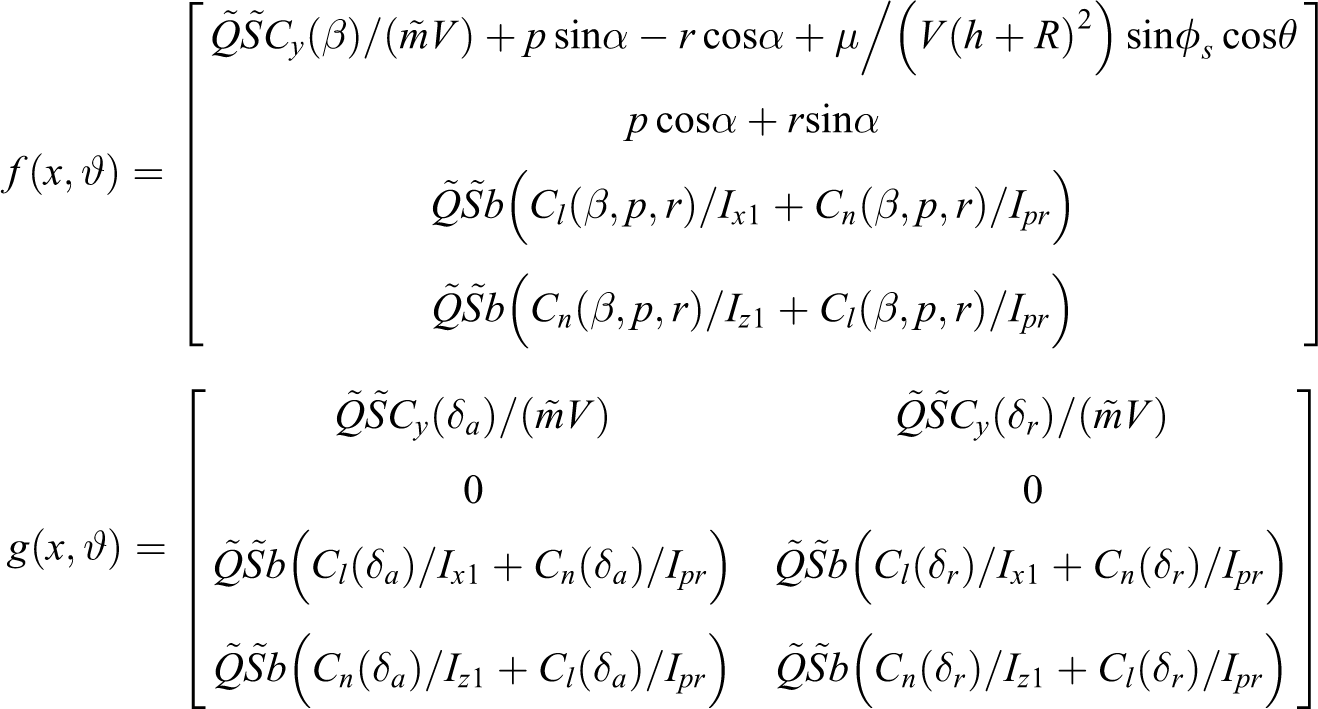
In order to maneuver quickly and respond accurately for command, HVs usually have a plane symmetrical configuration. However, the configuration causes inevitable coupling in the yaw and roll channels of HV lateral-directional dynamic model, 31,32 which is presented and described by a set of differential equations as




where

In equations (1) to (4), state variables are β, ϕs, p, and r, which denote the sideslip angle, bank angle, roll rate, and yaw rate of HV, respectively. The control variables are aileron deflection δa and rudder deflection δr. α denotes the angle of attack.
The HV dynamics (1) to (4) is a highly nonlinear system, which is affine in the control input in the flight envelop. The parameters in the HV system vary with flight conditions, and some of them such as aerodynamic coefficients are uncertain parameters. Then, the nonlinear system (1) to (4) can be expressed in the following state-space equation as

In equation (5), state vector
with
Problem formulation
As the dynamics of HVs is nonlinear along the trajectory, a T-S fuzzy model can be employed for its conceptually simple and effective. The T-S fuzzy model has been proposed by Takagi and Sugeno, 14 and each IF-THEN rule in the affine model represents the local linear input/output relations of nonlinear system. Considering the highly nonlinear HV system with uncertainty ϑ, the ith rule of the T-S fuzzy model of the nonlinear system (5) is as
Plant Rule i

where

where


and

Next, based on the parallel distributed compensation scheme, 33 the fuzzy control law with a state feedback controller for the HV is constructed as
Control Rule i

where

Applying the above controller to the uncertain system (6), the closed-loop system is described as

where When the operation state is the equilibrium point, the local model is obtained by Taylor’s linearization means, where When the operation state is not the equilibrium point, the local mode is obtained,
34
where


In HV lateral flight control system, the uncertain parameter vector
For the robust fuzzy control, it is worthy to notice that uncertain parameters ϑk can be treated as random variables with certain probability distributions, and they are generally assumed to be normally distributed based on statistics. According to the well-known FORM/SORM, the following transformation can be adopted to the random normally distributed variables ϑk as

where μk and σk are the mean value and standard deviation of the uncertain parameters ϑk. εk are standard normally distributed variables. Then, the matrices

Remark 1
For the flight control system of HV, the random distributed variables ϑk are from many sources, and some are with large distributed ranges. Then, the assumption of norm-bounded uncertainty in the classical robust control may be over-conservative. In that case, it is more reasonable to analyze the robustness of the fuzzy control system in the sense of probability.
Remark 2
It is worth mentioned that there exists a probabilistic robust approach for controller design by treating uncertain parameters as random variables. In this method, a reliability index is utilized to measure the failure probability of performance requirement. Thus, the system control performance can be considerably improved under the condition that the reliability level is satisfied.
Considering the control design requirement for an HV, a robust controller is usually designed not only to stabilize the system but also to guarantee an adequate level of external disturbance attenuation. For the norm-bounded disturbance w(t) satisfying

where tf is the terminal time of control, γ is a prescribed level of disturbance attenuation. Q1 and R1 are the given positive diagonal weighting matrices. x0 is the initial state of the system, and P is a symmetrical positive weighting matrix.
In addition, it is more appealing for the control designer that the following H2 control performance is minimized for the system in the absence of w(t) (i.e. w(t) ≡ 0)

where Q2 and R2 are the given positive diagonal weighting matrices.
Therefore, the objective of this study is to analyze the reliability measured by the maximum performance requirement violation probability and to seek a probabilistic robust fuzzy control design method for HV lateral system based on reliability theory. Then, the obtained controller may have optimal H2/H∞ performance under the condition that the reliability requirement is satisfied.
Before deriving the main results, the following lemma should be given.
Lemma 1
Given real matrices

holds for all Δi satisfying

Probabilistic robust H2/H∞ fuzzy control based on reliability
In this section, we first illustrate the reliability measurement for fuzzy control system with parametric uncertainty. Then, a probabilistic robust H2/H∞ fuzzy controller design method is presented, in which the closed-loop system H2/H∞ performance and reliability are considered simultaneously. Finally, the robustly reliable fuzzy controller is obtained by solving an LMI optimization problem.
Let us consider the H2 and H∞ performance defined in equations (13) to (14) for the uncertain fuzzy control system (8). In general, they can be obtained by solving a convex problem based on LMIs. The LMIs can be expressed as
Motivated by the condition that the uncertain parameters in system (8) are normally distributed, they can be linearly transformed as

where
We first discuss the robust reliability for the system (8) corresponding to the required
To evaluate the reliability, the performance function (also known as limit-state function) plays a vital role according to the commonly used structural reliability theory.
29
As is known, the robust fuzzy controllers exist if the matrix inequality

Thus, the control performance requirement violation probability can be measured by the proportion of the failure domain to the whole infinite topological space. The reliability corresponding to the performance function

where Prob{⋅} denotes the probability of that the expression in the brace holds, which is the probability of that the performance function
As is known, the most commonly used method to estimate Ps is the random sampling method based on Monte Carlo simulation. However, an excessively large number of simulations are required to achieve a reliable estimated value. The sampling procedures sometimes are impractical, especially when the matrices X and Yj are unknown. Thus, an approximate analytic method is employed in the probabilistic robust control.
With the help of the traditional reliability method, the reliability index and the robust reliability corresponding to the performance function are defined by Guo. 26 Reliability index for the uncertain system (8) is as

where sup{⋅} denotes the supremum, the set
Reliability index η in equation (18) represents the maximum admissible degree of the uncertain parameters expansion in the infinite topological space that is built by the standard normally distributed variables such that the performance function (15) is satisfied. It is essentially the minimal distance that is from the surface of failure domain (or the critical state) to the origin. The relations between reliability index and safe/failure mode are shown in Figure 1.

Illustration of reliability.
It can be seen from Figure 1, the larger the value of reliability index, the better the robustness of the fuzzy control, then the higher the reliability for the uncertain system satisfying the required performance. From this viewpoint, a fuzzy control system is reliable when the reliability index is set to a proper scale where the failure probability is rare.
The failure probability of performance requirement (performance requirement violation probability) is associated with the reliability index and the distribution of random variable ε. According to FORM, it is calculated as

where Pf denotes the failure probability, Ps denotes the safe probability, and Φ denotes the cumulative distribution function for the standard normal random variable.
Nevertheless, it is noteworthy that the performance function

with

where
Next, we discuss a sufficient condition for the fuzzy control of the uncertain system (8) to achieve the H∞ performance (13) with the prescribed reliability index.
Theorem 1
Consider the uncertain fuzzy control system (8), where

where

then the H∞ performance is guaranteed for
Proof
For the system (8), the Lyapunov function is defined as

Therefore, the disturbance attenuation level is satisfied with zero initial condition x0 = 0, if

Substituting

Substituting equation (20) into equation (25), and pre- and post-multiplying by

with
in which
By Lemma 1, the matrix inequality (26) holds for all uncertainties satisfying

Considering that

And by applying Schur complement to equation (28), it is equivalent to the matrix inequalities

This completes the proof. □
Remark 3
By Theorem 1, the performance function used for reliability analysis can be taken as equation (21). According to equations (18) and (19), the reliability index and the failure probability corresponding to the performance function (21) can be expressed as

where
Now, we discuss a sufficient condition for the uncertain fuzzy control system (8) is quadratic stable with H2 performance (14) under the condition that the prescribed reliability level is fulfilled.
Theorem 2
Consider the uncertain fuzzy control system (8), where

where

then the system (8) is quadratically stable with H2 performance satisfies
Proof
For the uncertain fuzzy control system (8), define the following Lyapunov function

Then, the uncertain fuzzy control system (8) is quadratically stable if
The H2 performance defined in equation (14) is as

Therefore, the system (8) is quadratically stable, and H2 performance satisfies

As

where
By Lemma 1, the matrix inequality (36) holds for all uncertainties satisfying

Applying Schur complement to equation (37) and substituting equation (29) into it, it is equivalent to the matrix inequalities
And the upper bound of H2 performance
This completes the proof. □
Remark 4
By Theorem 2, the performance function used for reliability analysis can be taken as equation (31). Then, the reliability index of the uncertain fuzzy control system (8) in the sense of H2 performance and corresponding to the performance function (31) can be expressed as
where
Theorems 1 and 2 provide an LMI approach to the design of a probabilistic robust fuzzy controller with mixed H2/H∞ performance. With the prescribed reliability level, if H2 and H∞ performance are considered to be optimized simultaneously, then the optimal fuzzy control design is a multi-objective optimization problem. According to equations (30) and (38), a reliability-based optimization of the robust mixed H2/H∞ fuzzy control can be carried out by solving the following problem

with
From the above analysis, the probabilistic robust optimal H2/H∞ fuzzy controller design based on the reliability theory in this study can be summarized as follows.
Design procedure
Step 1: Select the membership functions and the fuzzy rules in equation (6) and construct the corresponding T-S fuzzy model.
Step 2: Analyze the parametric uncertainty ϑ distribution and decompose the system matrices
Step 3: Choose the suitable weighting matrices Q1, R1, Q2, and R2 in equations (13) and (14).
Step 4: Choose the allowable ηmin and the optimization weighting parameters c1 and c2 to find the feasible solution of X and Yj for the optimization problem (39), then the probabilistic robust fuzzy controller can be obtained.
In the last step, the H2/H∞ performance and reliability for the uncertain fuzzy control system (8) are considered simultaneously, and the trade-off between these importance factors in the robust fuzzy control design is possible.
Simulation study
In this section, simulation results are shown and compared to verify the effectiveness of the proposed method. The reentry flight trajectory conditions are set as: Mach Number is from 10 to 8, flight height is from 80,000 ft to 60,000 ft, and angle of attack is from 3.5° to 4° (as given in Figure 2).

HV reentry trajectory. HV: hypersonic vehicle.
According to the aerodynamic coefficients and the dynamic model of HV,
31
the uncertain parameters ϑ1, ϑ2, ⋯, ϑ13 in fuzzy control system are aerodynamic coefficients
Uncertainty distribution parameters.

Under the above settings, we can construct the T-S fuzzy model of HV in equation (6) to apply the proposed method. The premise variables are Mach Number, angle of attack, and flight height. It is assumed that

Since the state variables of T-S fuzzy model (6) are not selected as premise variables, the equilibrium state
Let

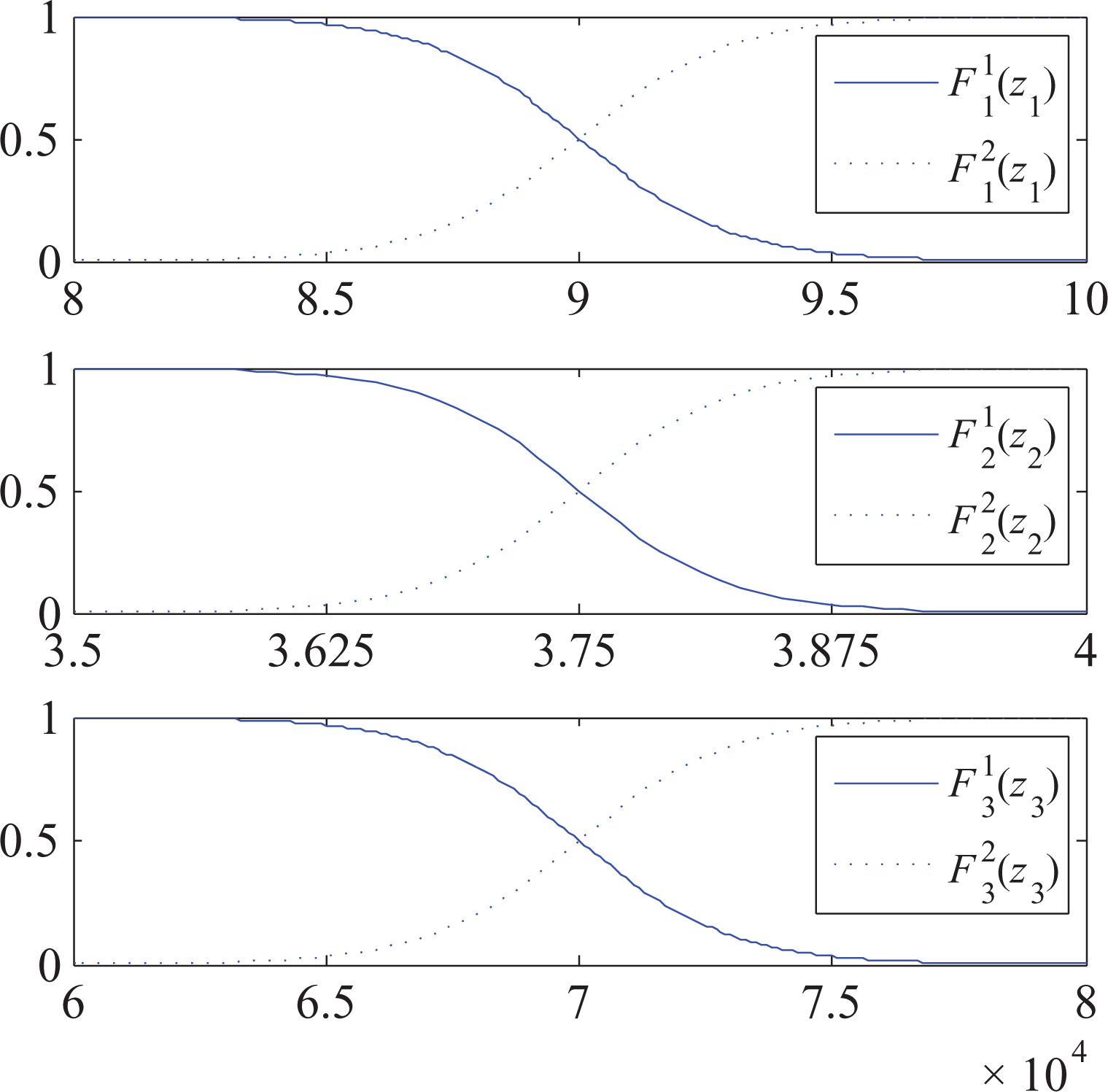
Membership function of the fuzzy sets.
Hence, the following T-S fuzzy model for the HV nonlinear system (1) to (4) is obtained
Plant Rule i

where
Then, the T-S fuzzy model of HV system with uncertainty in (6) is obtained as

where

with
Next, the uncertain matrices


where other columns
The weighting matrices of H2/H∞ performance defined in equations (13) to (14) for the uncertain fuzzy system are set as
By the presented method, the optimization problem corresponding to equation (39) with ηmin = 4 is solved, the gain matrices of the optimal H2/H∞ robust controller are obtained as follows (where only two gains are given for brevity)


If ηmin = 3 is taken, the controller gains are


If ηmin = 1 is taken, the controller gains are


The relation between the prescribed minimum reliability and the optimal H2/H∞ performance
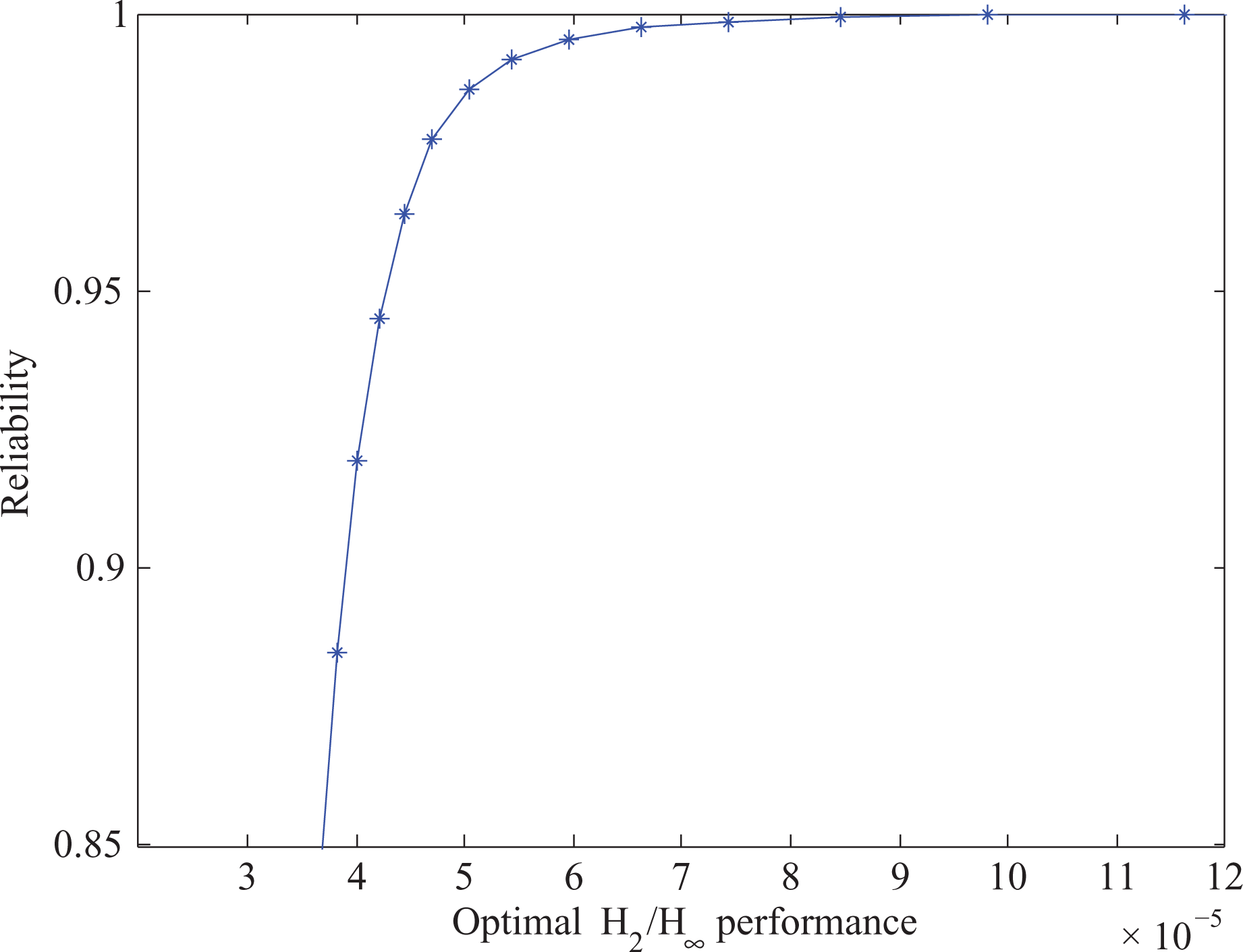
The reliability versus the optimal performance.
To examine the effectiveness of the probabilistic robust fuzzy controller corresponding to the H∞ performance, simulation results of impulse disturbance responses for the HV lateral system are shown in Figure 5, in which the uncertain parameters are generated randomly according to their probability distributions. And the data of the uncertain parameters in the simulations of the different cases are the same. The external disturbance is set as

Impulse disturbance responses of HV with the uncertain parameters generated randomly. HV: hypersonic vehicle.
To examine the effectiveness of fuzzy controller in the flight trajectory (Figure 2), the simulation results of attitude commands tracking responses of HV lateral system with randomly generated parameters are shown in Figure 6. In the simulation, the data of the uncertain parameters of the different cases are the same, and the initial state is

Command tracking responses of HV with randomly generated parameters. (a) State tracking responses for HV with uncertain parameters. (b) Actuator responses for HV with uncertain parameters. HV: hypersonic vehicle.
Furthermore, the accuracy of the proposed reliability measure for uncertain system satisfying required performance is examined. After the fuzzy controller is obtained, we use Monte Carlo simulation to estimate the probability
Finally, to show the merit of the proposed method, we apply the robust T-S fuzzy method studied by Hu et al.
18
for comparison, where the fuzzy control law and IF-ELSE rules in these two methods are the same. The regulated output in the robust T-S fuzzy method is given as
By applying the probabilistic robust fuzzy controller and the robust fuzzy controller 18 to the HV, respectively, the simulation results of attitude command tracking response of HV with randomly generated parameters are shown in Figure 7. The data for simulation are set the same.
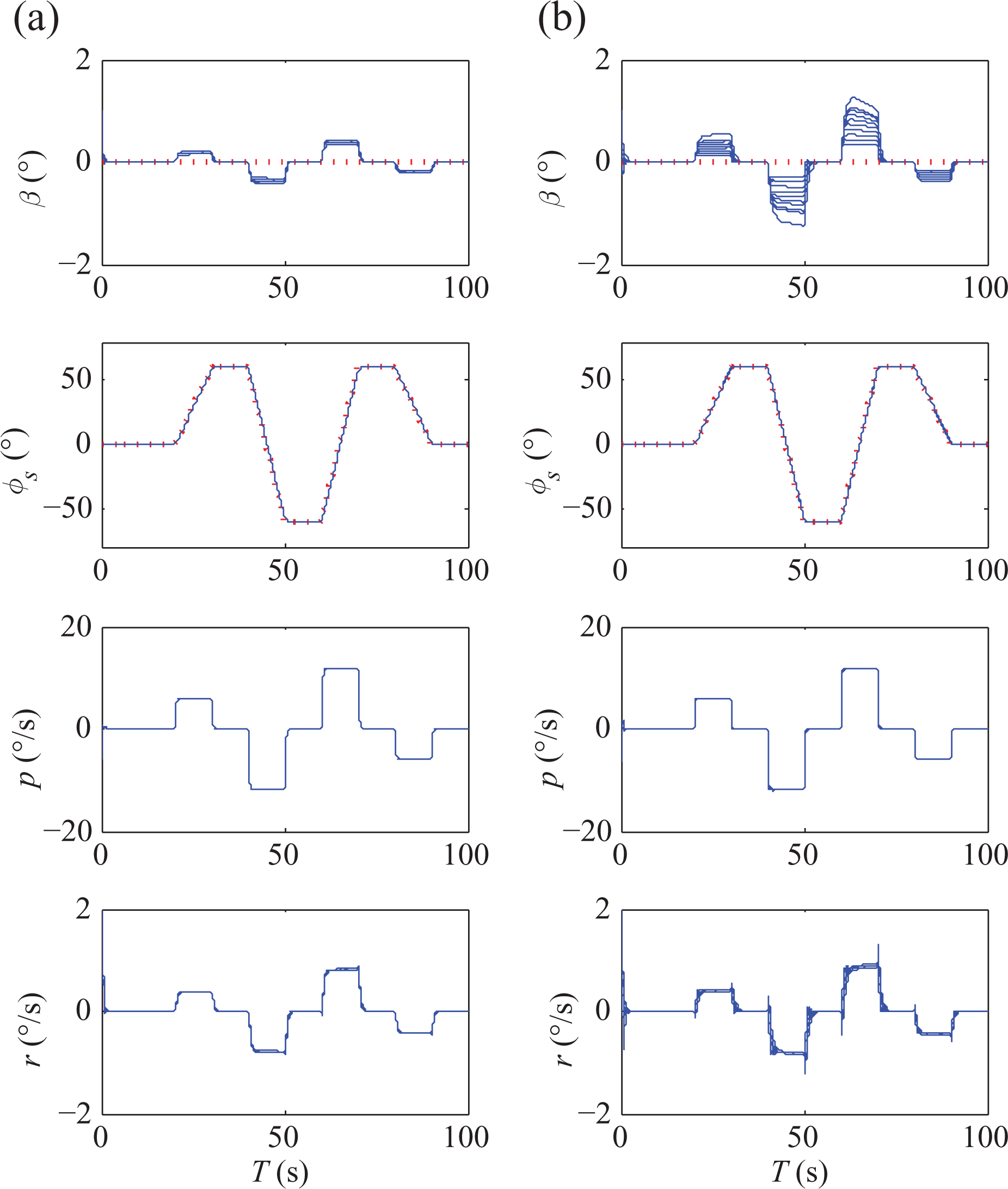
Command tracking responses of HV by two fuzzy control methods. (a) Probabilistic robust fuzzy control. (b) Robust fuzzy control. HV: hypersonic vehicle.
The commands of sideslip angle and bank angle are depicted in the dashed lines. The solid lines show the state tracking responses of the HV with uncertainty, where the tracking responses of the probabilistic robust fuzzy control are shown in Figure 7(a), while the tracking responses of robust fuzzy control are shown in Figure 7(b). From Figure 7, we can observe that the proposed probabilistic robust T-S fuzzy controller based on reliability presents a better tracking performance than the robust fuzzy controller. 18 Obviously, it is seen that proposed method can provide better robustness for the HV flight control system.
Conclusions
In this article, the problem of robust fuzzy control of the uncertain HV system was studied from the viewpoint of reliability. A new efficient probabilistic robust fuzzy control method of uncertain system based on reliability was presented systematically. A T-S fuzzy model was employed for nonlinear dynamics of HV. By treating the uncertain parameters as normally distributed variables, the probabilistic robust mixed H2/H∞ fuzzy state feedback controller design was carried out by solving a multi-objective optimization problem with the prescribed allowable minimum reliability index. With this method, the robust reliability measurement and the failure probability of the uncertain HV system satisfying required H2/H∞ performance can be obtained. The robust fuzzy controller obtained in this article may possess an optimal mixed H2/H∞ performance under the condition that the closed-loop HV system is robustly reliable with respect to random uncertainties. Moreover, the presented method makes it possible to consider the H2/H∞ performance and reliability simultaneously in terms of LMIs. The simulation results of the HV show that the proposed method is effective.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Nature Science Foundation of China (grant nos 61473124 and 61573161) and Science and Technology on Aerospace Intelligent Control Laboratory, Beijing Aerospace Automatic Control Institute.