
Abstract
The power metal oxide semiconductor field effect transistor is used extensively in analog circuits and digital circuits. However, it is also the highest failure rate component in the power electronics system. In order to avoid serious failures in the electrical system, it is necessary to predict the remaining useful life of the metal oxide semiconductor field effect transistor. With the aim to accurately predict the remaining useful life, this article presents an improved particle filter method, which can estimate the metal oxide semiconductor field effect transistor degradation degree by the on-resistance (Ron) changing data. This method is based on the particle filter algorithm, which is suitable for nonlinear and non-Gaussian system; at the same time, the proposed method can avoid the degeneracy phenomenon in the particle filter. First, the strong tracking Kalman filter is used as the importance function to update the particles with the latest observation in the sample process. The Metropolis–Hastings algorithm is used to introduce some new particles to guarantee the effective particle number in the resampling process. The experimental results indicate that the improved particle filter algorithm can obtain more effective remaining useful life prognostic than that of the particle filter.
Keywords
Introduction
Metal oxide semiconductor field effect transistor (MOSFET) is an important power semiconductor device and is widely applied in analog circuits and digital circuits. 1 However, at least 34% of failures in analog circuits and digital circuits are caused by power electronics fault subjected to high switching speed and/or overheating. Power electronics have become a limitation on the reliability of electrical systems. 2 Therefore, the remaining useful life (RUL) prognostic of power electronics has received much more attention, which can take effective measures to reduce the loss before failure. Many approaches have been proposed to predict the RUL of electronics, for example, battery, light-emitting diodes, insulated gate bipolar transistor (IGBT), MOSFET.3–6 There are several RUL prognostic approaches in the existing literature that can be grouped into two categories: data driven and physics of failure (PoF).7,8 PoF methods are based on the physical mode, which make use of the knowledge of fault mechanism and life cycle load of electronics equipment to design and evaluate its reliability. Data-driven methods analyze the data that can be easily obtained by sensors and are relatively easy to implement due to ignoring the physical principles and factors, such as temperature in the model. 9
The power electronics mainly include IGBTs and MOSFETs. MOSFET is a kind of field effect transistor which can be widely used in analog and digital circuits. MOSFET can be divided into different types: “N type” and “P type” of the two types according to the difference of its “channel” (working carrier) polarity. From the perspective of performance degradation, the power MOSFET lifetime model is based on its static parameters over time. The power MOSFET has multiple failure modes that can be divided into two kinds, the package structure failure and parameter drift failure. These two failure modes often occur together. There are many kinds of failure mechanisms of the power MOSFET, and most of the failure mechanisms are caused by material, design, and mode of production. Each failure mode may correspond to a variety of failure mechanisms. The key parameters play important roles in the RUL prediction.10–12 Extracting the failure precursor parameter is the first task in degradation prediction. The gate threshold voltage, the collector–emitter voltage (VCE), collector–emitter current (ICE), and on-resistance are used as the failure precursor parameters. 13 “Threshold” is the level at which MOSFET starts to failure. Patil et al.14,15 studied the anomaly detection of the IGBT-based Mahalanobis distance (MD) and the RUL prediction–based particle filter (PF). In Patil et al., 14 the MD was calculated by VCE and ICE, which were used as input parameters to detect anomaly. In Patil et al., 15 the anomaly detection approach is the same with Patil et al., 14 and the RUL prognosis of the IGBT used the PF algorithm. Li et al. 6 calculated the VCE and ICE parameters based on the temperature cycling test and used the PF algorithm to predict the RUL of the IGBT.
Dumin et al. 16 established a physical model based on the breakdown process to estimate reliability. Threshold voltage is an important parameter for the performance of MOSFETs and can be used to predict life.17,18 In Santini et al., 17 the threshold voltage degradation was modeled by a non-homogeneous gamma process. In Celaya et al., 19 the paper proposed the extended Kalman filter as a prognostics approach for power MOSFET with the condition of thermal-stress aging. Based on the mechanism of the hot carrier degradation, the least-squares method was used to predict the lifetime of MOSFETs, considering the effect of temperature an electric stress. 20 Although the model is accurate, it is difficult to establish in a complex dynamic system. In another paper, the extended Kalman filter is used to estimate the parameters of the model and the RUL of MOSFETs, while the model is made with the degradation data of the resistance. 21 Dusmez et al. 22 used classical least-squares algorithm and Kalman filter to estimate RUL of power MOSFETs based thermal cycling data. Zheng et al. 23 studied the RUL of power MOSFETs based on the data-driven model, using the relevance vector machine to update the degradation model for the prediction accuracy. Zheng et al. 24 researched the relation between the ring signal and degradation degree of MOSFET. Zheng et al. 24 proposed the online prediction method based on the ring signal. Furthermore, Wu et al. presented MOSFETs degradation model and used strong tract filter to predict the degradation degree of MOSFET and got a good results.
In terms of the methods, there are many methods used to predict the RUL, such as PF, relevance vector machine, and Kalman filter.6,23 In these approaches, the PF algorithm is suitable for nonlinear and non-Gaussian system and can give the quantitative evaluation with the probability density function. 25 Therefore, the application of the PF algorithm is becoming more and more widespread. However, the accuracy is influenced by the problem of sample impoverishment, caused by the importance function and re-sample method. With the view of enhancing the accuracy, this article proposes the improved particle filter (IPF) algorithm. First, the strong tracking Kalman filter (STKF) is used as the importance function to update the particles with the latest observation in the sample process. Then, the Metropolis–Hastings (MH) algorithm is used to introduce some new particles to guarantee the effective particle number in the resampling process.
The IPF algorithm
The PF algorithm is a recursive Bayesian filtering algorithm based on a large number of random particles and the corresponding weights to estimate the posterior probability distribution. 26 As it is suitable for the nonlinear and non-Gaussian system, and it gives the uncertain representation of the probability density function (PDF), there are many studies about the PF algorithm. 6 The improved resampling method helps to resolve degeneracy phenomenon in PF. With the view of enhancing the accuracy, the importance function and resampling method should be improved. Thus, based on the theories of the MH and the STKF, we proposed the IPF algorithm.
The main thought of the IPF is as follows. First, the STKF is used to get closer to the true state of particle distribution in the sampling process, according to the prediction error correction of particle position. Second, resampling is based on the weights and the new particle should be considered. When the effective particle number is less than the threshold, the particles with light weights should be chosen. Then new particles should be introduced with the particle mean and variance. These new particles are dynamically accepted using the MH algorithm. Consequently, the state can be estimated with the particle and the corresponding weight. The detailed implementation process of the IPF algorithm is shown as follows.
Given the state function and measurement function as follows

where
Initial sampling


The flowchart of the IPF algorithm.
The initial state
2. Updating the particles and the corresponding weights based on STKF 27
Considering the STKF is used as the importance function, the particle and corresponding variance are updated as follows:
State variable

The prediction error

In the prediction process,









Calculating the value of


3. Resampling used the MH algorithm 23
The resampling is based on corresponding weights. When the number of the effective particles
(a) A random number is generated based on uniform distribution:
(b) New samples

(c) Moving by the acceptance ratio

where
The particle is copied if its weight is heavy or it may be replaced.
4. State estimation
The state variable

Here,
RUL prediction of power MOSFET
RUL prediction with IPF
In this article, we use the “MOSFET thermal overstress aging data set,”
28
which conducted run-to-failure experiments about power MOSFETs under thermal overstress. In this accelerated aging setting,

where
The IPF algorithm is used to predict the RUL with two different data sets: data8 and data14. 15 Compared with the predictions of the PF algorithm, the predicted results are as follows.
Prediction results of data8
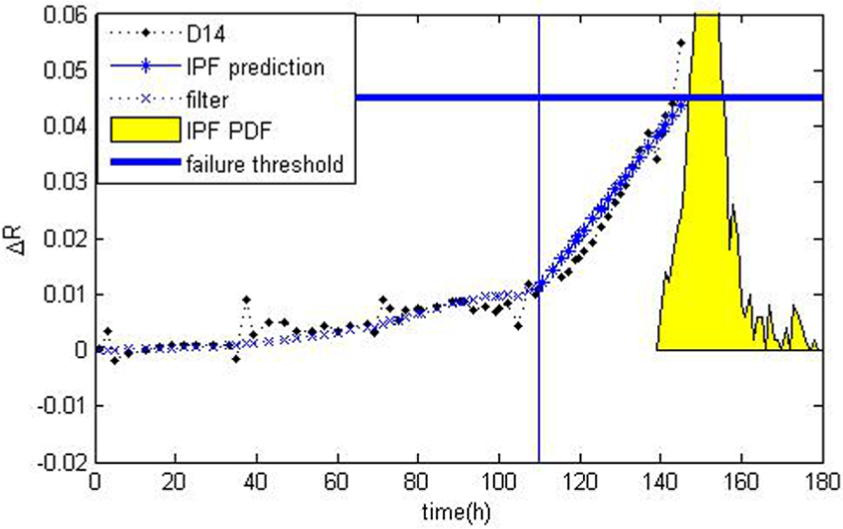
In order to test the validity of the IPF algorithm for prediction RUL, we first compared the predicted results with different data. Figures 2 and 3 show the prediction results of MOSFET using IPF method based on different data sets. In Figure 2, using the data before 80.5 h as known data, the prediction failure time is mainly distributed from 130 to 150 h, and the RUL is 63.5 h. In Figure 3, when we used 91.5 h as known data, the prediction RUL is 51.5 h, and the prediction error is 0.5 h. It is clear that more history data are benefit for the prediction accuracy.

Prediction results at 80.5 h of data8 with IPF.

Prediction results at 91.5 h of data8 with IPF.
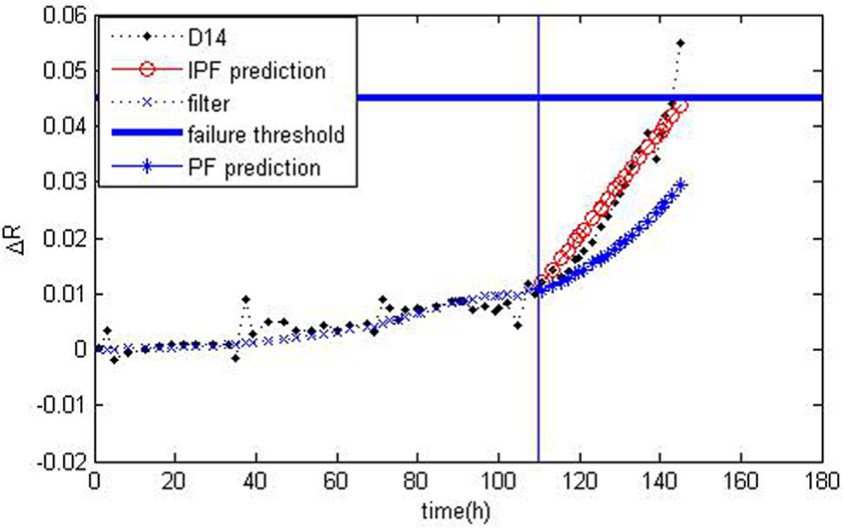
Based on the same data, we have compared the prediction results between PF algorithm and IPF algorithm. The RUL prediction results of data8 using the IPF algorithm and PF algorithm are shown as follows.
The prediction results using the IPF algorithm are more intensive, compared with the results of the PF algorithm, as shown in Figures 4 and 5. According to Figures 4 and 5, it is clear that compare with PF, the

Prediction results at 80.5 h of data8 with the PF and IPF.

Prediction results at 91.5 h of data8 with the PF and IPF.
The prediction results of data8.
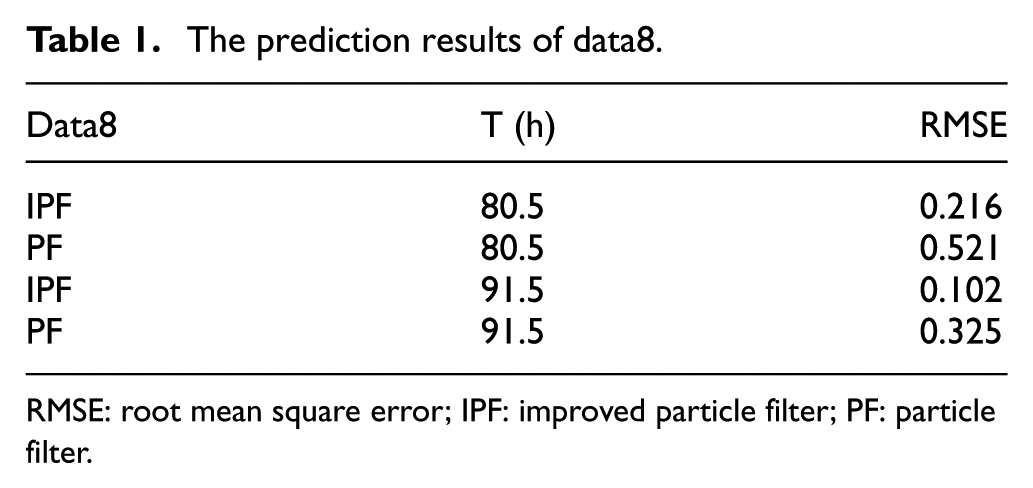
RMSE: root mean square error; IPF: improved particle filter; PF: particle filter.
Prediction results of data14
In order to test the validity of the IPF algorithm for prediction RUL, we first compared the predicted results with different data. The RUL prediction results of data14 with the IPF algorithm and the PF algorithm are shown as follows.
Figures 6 and 7 show the RUL prediction results with the IPF algorithm based on data before 99.9 and 110.1 h, respectively. In Figure 5, the prediction failure time is mainly distributed from 130 to 160 h, and the prediction RUL is 41.5 h. The prediction RUL with the known data before 110.1 h in Figure 6 is 34.9 h.

Prediction results at 99.9 h of data14 with IPF.
Prediction results at 110.1 h of data14 with IPF.
The prediction results using the IPF algorithm are compared with the results of the PF algorithm, as shown in Figures 8 and 9. In Figure 8, the results with the PF and IPF are both predicted at 99.9 h. The PDF width is about 50 h with the IPF algorithm, while the PDF width using the PF algorithm is about 55 h, and the error with the IPF is less than the error with the PF. Table 2 shows the results of RMSE using the PF and the IPF algorithm.

Prediction results at 99.9 h of data14 with the PF and IPF.
Prediction results at 110.1 h of data14 with the PF and IPF.
The prediction results of data14.

RMSE: root mean square error; IPF: improved particle filter; PF: particle filter.
Conclusion
With the aim to predict accurately of the RUL, this article derives an IPF algorithm for predicting the RUL of MOSFET. The IPF method utilizes the STKF and MH to improve the PF algorithm. The STKF is used to update the particles and the particle positions are corrected according to the latest observations. Meanwhile, the MH algorithm is used to introduce new particles. Based on the “MOSFET thermal overstress aging data set,” we predict the RUL of MOSFET with the IPF and PF algorithms. The experiment is implemented with two different data sets. Each result shows that the life distribution is more intensive and the prediction results are more accurate based on IPF compared to the PF algorithm.
However, in our research, we find some problems need to be resolved. For example, the prediction results may be influenced by the linearization, with the STKF introduced into the PF.
Footnotes
Handling Editor: Nicolas Garcia-Aracil
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (no. 61202027), the National Key Technology R&D Project (no. 2012DFA11340), the Beijing Natural Science Foundation of China (no. 4122015), the Project on the Construction of Innovative Teams and Teacher Career Development for Universities and Colleges Under Beijing Municipality (no. IDHT20150507), and the Scientific Research Base Development Program of the Beijing Municipal Commission of Education (TJSHG201310028014).