
Abstract
An appropriate threshold is the key factor in a diagnosis of fault. However, the traditional method of setting a fixed threshold does not take into consideration the influence of system status and noise interference, and it often leads to false alarms and missed detections of system fault. To improve the accuracy of fault diagnosis, we first obtained the residual signal based on the strong tracking filter method – cubature Kalman filtering. We then proposed an adaptive dynamic threshold adjustment algorithm based on the grey theory. In this method, the threshold value can be dynamically adjusted according to the real-time mean and variance of the residual. Finally, we performed a sensor fault experiment involving three sensors in different locations of a robot. The results demonstrate the feasibility of our proposed method.
Introduction
Sensors are being applied in a wide range of areas, both civil and military. The sensor is the most critical component in systems of measurement and control, but it is prone to failure, leading to system paralysis. Sensor fault diagnosis has attracted much attention in the past several decades.1–5 Methods of diagnosing fault can be divided into two categories: data-driven techniques and model-based techniques.6,7 The fault diagnosis method is data-driven. In this method, measurable data on the status of the equipment are first acquired. Effective feature information is then extracted through analysing the data. Finally, a judgement is made on whether a fault has occurred or not. In contrast to data-driven techniques, which require a great deal of data and are of low accuracy, fault diagnosis algorithms based on models are developed to monitor the consistency between the measured outputs of the sensors and the predicted outputs of the model. These methods require the building of an accurate mathematical model of the sensor based on control theory and statistical analysis, which will yield a comparative analysis of the residual and the threshold to determine whether a fault has occurred. Therefore, the key to solving the problem is to set a reasonable threshold, as the threshold will directly affect the accuracy of fault diagnoses. 8 If a threshold is set too high, the phenomenon of omissions could easily occur; if a threshold is set too low, the phenomenon of false alarms will occur. 9
Traditionally, a fixed threshold is carried out only according to experience, and various relevant factors are not taken into consideration, such as system status, noise and model uncertainty. Hence, the result will be false positives and false negatives. To solve this problem, many scholars have put forward the method of setting a dynamic threshold. Zhu et al. 10 proposed a method of adjusting the bandwidth coefficient in the threshold by training the bandwidth coefficient and making the threshold adaptive. However, this method did not perform well in abrupt faults because it adjusted the coefficient according to the number of false positives in the process of training the bandwidth coefficient. Xie et al. 11 set the threshold by adopting a multi-characteristic parameter method. This reduced the number of false positives in fault detection. However, the process of continuously updating multi-characteristic parameters often resulted in auditing delays because the value was too large, which is unsuitable for online fault detection. Clouse et al. 12 adopted the method of neural networks to train both the threshold and the weight, which made the threshold more adaptive. This method has good adaptability and nonlinearity, and it can reduce the rate of false positives and false alarms in fault detection. However, this method requires a large amount of training data, and the calculations are complicated, so it is unsuitable for online fault detection. Youssef et al. 13 developed an analytical model of fault detection that uses an optimization procedure to optimally set the fault detection threshold, which depends on the signal to noise ratio and the severity of the fault. The result showed that this optimized threshold led to higher efficiency in the detection of incipient faults in noisy environments. Unfortunately, this method is very complicated.
Therefore, an online fault threshold adjustment algorithm based on grey theory is proposed in this article, where the mean of the residual and the variance are used as the parameters to dynamically adjust the threshold and update the threshold in real-time. We used three sensors in different locations of a robot for the experiment. The results show that the proposed method is effective at reducing the rate of false alarms and missing reports.
Obtaining residual signal based on a strong tracking filter – cubature Kalman filtering
The sensor system can be described as follows


where
First, strong tracking filtering 14 is used, and a first-order Taylor series is adopted to make the following linearization


The time is updated


Gain

The measurement is updated


The fading factor





To reduce the linearity error caused by the first-order Taylor series in the strong tracking filtering method, we refer to the method of cubature Kalman filtering and use the three-degree spherical-radial cubature rule to approximate the nonlinear function, making the estimation more accurate. According to the cubature Kalman filtering algorithm,
15
we choose 2n points of a volume set

The point of the volume is

The point of the volume after the spread is

The time is updated


The point of the volume is constructed




Gain

The measurement is updated


Let

Through the above calculation, we obtain the estimated output value. We then compare the estimated value and the actual output to acquire the residual signal r.
An adaptive threshold algorithm based on the grey theory
The residual and mean of the ith sensor are

Given

The mean value and variance are

where n is the bandwidth coefficient, and


Thus, we can obtain the threshold, which is updated in real-time.
However, we still need to estimate the residual
1. Process the residual data and generate the original data sequence

Here,
To eliminate the randomness and volatility of the residual signal, we perform the preprocessing of

Here,
2. Make a grey prediction according to the model

In equation (34), a is the development of the series, and b is the internal control grey number

And
Obtain the predicted value of the residual at the

We can determine the estimated value
When the residual exceeds the threshold that has been set, it can be considered a sensor fault.
Sensor fault type
For instance, the fault conditions of the position sensor in a robot are as follows: 17
Abrupt faults. The output of the sensor can suddenly increase or decrease; the model for this condition is

The drift failure model is as follows

where A and B are unknown constants.
Complete failure. There are three kinds of output in the sensor when it becomes a complete failure. One type of output is a value that is the same as that in the previous moment; this state is called the jammed state and is shown as follows

Another type of output is constant; the model for this is shown as the following equation

The third type of output is 0, indicating that the sensor is a complete failure:
Fault injection experiment
In this article, to verify the effectiveness of the above three methods, we developed the dynamic and kinematic equations of the robot in MATLAB according to the robot model. 18 More details about the construction and operation of the robot are given in the article. 18 Based the robot simulator, three kinds of sensor faults are implemented in the robot from different locations. We then use the strong tracking filter to design the observer. Finally, the actual output signals are compared to obtain the residual signal.
The experiment on abrupt faults
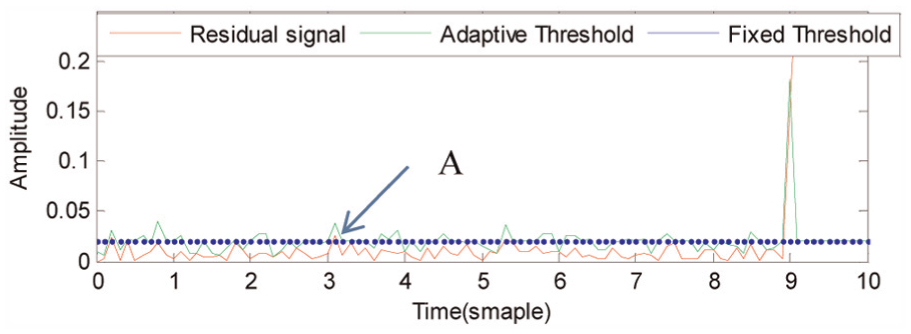
In accordance with the definition of a fault (an unpermitted deviation of the parameter of the system from the standard condition), 19 sensor faults of 10% are implemented abruptly in the robot’s joint position after the seventh second of the simulation time. A 10% abrupt fault means that the deviation is 10%. The residual that is generated is used to detect faults employing the proposed adaptive threshold selection method and the fixed threshold selection method.
As shown in Figure 1, at points A, B, C and D, if a constant threshold is used, we assume that the fault occurred because the residual is over the threshold. In fact, there is no fault. From Figure 1, at time = 7, it is clear that the difference between the residual and the adaptive threshold is greater than that between the residual and the fixed threshold. That is, the proposed method significantly enhanced the difference between the threshold and the residual and is a good predictor of the fault.

The fault detection of the abrupt fault is 10%.
The experiment on drift fault detection
As shown in Figure 2, at points A and B, we assume that the fault occurred because the residual is over a fixed threshold. But this is a false positive. At the time of

The fault detection of the drift fault is 10%.
It is clear that the proposed method, in contrast to the fixed threshold method, can detect the drift fault and decrease the false-positive rate.
Complete failure
Complete sensor failure is implemented in the robot’s joint position after the ninth second of the simulation time, and the sensor in the robot’s joint position is in the stuck state. Figure 3 shows that the generated residual is used to detect faults employing the proposed adaptive threshold selection method and the fixed threshold selection method. At point A, however, there will be a false alarm if a fixed threshold is used.
The fault detection of complete failure.
From Figures 1–3, it is obvious that the proposed method can effectively diagnose faults with a higher accuracy and a lower false-positive rate compared with other methods.
To further determine the effectiveness of the proposed method, we conducted 200 fault injection experiments in three sensors. The results are shown in Table 1. We compared the use of the adaptive threshold selection method with the fixed threshold method in the robot’s sensor fault detection. The results are shown in Table 1.
Statistics on the false alarm rate and missing report rate at different thresholds.

Employing two kinds of threshold selection methods in an experiment comparing the fault detection of a sensor in a robot’s joint position, the proposed method was shown to be capable of reducing the rate of false positives and of improving the accuracy of fault detection.
Conclusion
We proposed an adaptive threshold selection method targeting the shortcomings of the current fixed threshold method in detecting faults. For this method, the influence on the residual signal was considered, and an adaptive threshold algorithm was designed. Through the detection of three types of faults by a sensor in a robot’s joint position, the experimental results showed the following:
Compared with fixed threshold methods, the proposed algorithm provided robust and efficient fault estimation for a sensor.
The method put forward in this article can reduce the missing report rate and false alarm rate in fault detection.
Judging from the 200 fault injection experiments in sensors, the missing report rate and the false alarm rate obtained using the proposed method are far lower than the rates of fixed threshold methods (see Table 1).
The simulation results showed the performance of the proposed approach. However, the proposed adaptive threshold selection method was not applied to real robot sensors, which are more complex than those used in the experiment. Hence, the goal in a future study is to use this method on real sensor systems and to improve the method of detecting faults in actual operating conditions.
Footnotes
Academic Editor: James Lam
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (no. 61202027), the National Key Technology R&D Project (no. 2012DFA11340), the Beijing Natural Science Foundation of China (no. 4122015), the Project on the Construction of Innovative Teams and Teacher Career Development for Universities and Colleges Under Beijing Municipality (no. IDHT20150507) and the Scientific Research Base Development Program of the Beijing Municipal Commission of Education (TJSHG201310028014).