
Abstract
Recent studies predict that by 2060, people aged 65 or more will account to one third of the European population. These statistics raise questions regarding the sustainability of the society, so technological solutions have been emerging to prolong the active age of European citizens. One of the main impairments for elders to have an active life is an increasing difficulty in performing a natural gait. Some exoskeletons were identified with elder gait assistance as one of several features. However, to cover other features, these exoskeletons are generally large and bulky. Wearing a very visible device may cause an unwanted awkwardness. For this reason, the authors are developing an active exoskeleton whose sole purpose is to assist the gait of an elderly person. The proposed system is based on a low-profile design, allowing a smaller frame that permits the device to be worn beneath loose clothing, making it more desirable to wear in public by reducing social awkwardness. The framework for designing the mechanical support for the exoskeleton is presented. Three-dimensional human models were imported into Solidworks, developing the components assembled around the human models and performing finite element analysis simulations to test the system with subject of different weights. The design can adapt to several body shapes using variable distances between components. The exoskeleton frame supports 7 degrees of freedom for each lower limb.
Keywords
Introduction
Europe is the continent with the oldest population in the world. Recent projections for the European Union show that by 2060, the people aged 65 or more will account to one third of the population. Therefore, the ratio between working age and non-working age people would be 2 to 1, which raises questions regarding the sustainability of the European society. 1 Due to this growing concern, many studies2–4 and initiatives5,6 have emerged in order to extend the active age for European citizens.
The aging process in the human being results in several changes in the musculoskeletal system. Among other effects, the muscles shrink and lose mass, the number and size of muscle fibers decrease, the tendons and cartilages become less tolerable to stress, the heart lowers the speed at which it can pump blood, and the bones lose mass, becoming more prone to fractures. 7 One of the first major symptoms that appear with aging is an irregular gait and decreased gait speed. 8
The appearance of these symptoms usually results in an increasingly sedentary life. Consequently, a sedentary life will aggravate the aforementioned changes (Figure 1). An absence of muscle stimulation results in loss of muscle mass 9 and the lack of stress applied to human bones will prevent the piezoelectric effect and mechanotransduction that maintain their density. 10

Cycle of symptoms and consequences during aging.
In order to address this issue, the authors initiated a study that aimed to develop a technological solution to assist the gait for elders. One possible approach is to develop an active assistive exoskeleton for the lower limbs. Due to technological evolution regarding computer miniaturization, actuator, and material technology, development and study of active assistive orthoses or exoskeletons have recently taken a surge. 11
The authors identified rehabilitation exoskeletons, for example, hand 12 and ankle injuries,13,14 and devices for general strength enhancement for healthy people in order to assist physical labor in various activities like agriculture, 15 weightlifting,16,17 and carrying loads.18,19 More recently, there have been introduced to the market exoskeletons with the ability to return the gait capability to patients suffering from paraplegia, such as the ReWalk 20 (Figure 2) and Ekso 21 exoskeletons, with satisfying success rates. These solutions can be worn by the patients and use either fully manual controls or automated gait patterns.

Diagram representing the gait cycle for the right lower limb (highlighted in blue) from a healthy human being. The muscles that are generating work for the hip extension and flexion during the Stance and Swing phases, respectively, can be seen highlighted in red, as well as the direction of the motion. These movements are actively assisted in the proposed system.
Some exoskeletons were identified for assisting elders as well as strength enhancement for other tasks. 22 However, in order to cover a large number of features and capabilities, the active exoskeletons for gait assist are generally large and bulky. 23
As of the time of writing, the authors were unable to identify gait assist exoskeletons with the ambition of assuming a low-profile design. A smaller frame could let the device be worn beneath loose clothing, making it more desirable to wear in public by reducing social awkwardness, such as some currently available passive hip-knee-ankle-foot-orthoses (HKAFO). 24
Proposal
The proposal for this work is to develop a low-profile active exoskeleton with a smaller scope than other active exoskeletons, which is unique to assist an elderly person’s gait and other daily life activities such as climbing stairs. Given the different set of requirements for this work, it is expected for this device to be able to assume a smaller frame, which could go unnoticed if the user is wearing loose clothing. Another factor being taken into account is the cost of the exoskeleton. For example, the ReWalk exoskeleton is marketed as a lower cost alternative among devices of this type, but it costs around €36,000, which is beyond reach for many European households. Therefore, an active gait assist exoskeleton with the aforementioned properties would be a welcome addition to a growing panoply of technological devices being researched for the growing population of elders in developed countries. At the current stage, the assisted movement in the exoskeleton is the hip flexion and extension.
Meaningful findings
This article describes the research process for designing the mechanical support for the gait assist active exoskeleton. The design restrictions and objectives are detailed and the component and material choices are explained, and a final design for the first prototype is also shown.
A mechanical frame was built with low volume and low weight (9.4 kg total) using low-cost materials (aluminum and off-the-shelf bearings), capable of withstanding the typical torques applied at the hip joint with a large safety margin.
Materials and methods
Actuated movements
The human gait cycle can be divided into two phases: Stance and Swing. During the Stance phase, between 0% and 60% of the cycle, the body is moved forward when assisted by the front leg’s hip extension. From 60% to 100% of the gait cycle, the Swing phase consists of moving the same leg to the front when assisted by hip flexion (Figure 2), which also moves forward the body’s center of mass. The first prototype of the active exoskeleton was designed to feature an actuator that assists hip extension and hip flexion. Since these are two antagonistic movements, they can both be performed by the same actuator for each leg if the actuator is capable of generating torque in two directions, such as a direct current (DC) motor. For the hip extension during Stance phase, the exoskeleton assists the work generated by muscles that suffer from atrophy in elders, 25 the gluteus medius and gluteus maximus muscles. During the swing phase, the reverse movement assists the hip flexion which is generated by the psoas major in the abdominal region, the iliacus in the pelvic region, the sartorius across the leg, and the rectus femoris. 26 Due to the symmetry of the biomechanics between left and right legs during gait, the exoskeleton is also symmetric.
Through these movements, the exoskeleton is also potentially able to assist its wearer to roam through non-leveled terrain such as climbing stairs. The actuators and batteries are expected to be positioned in the lower back and will perform a push/pull force directly into the mechanical frame through Bowden cables. For the moment, the authors have projected an added weight of 10 kg for the actuators and respective batteries.
Although the knee and ankle movements are also commonly weak among elders, at this stage, the exoskeleton is projected to assist only the hip flexion and extension because these movements involve higher torques during gait. 27 Therefore, it is the movement that, through active assistance, may save more energy, thus providing greater stamina to its elder user. Also, the position of the hip joints is closer to the actuators, which may facilitate their integration.
Software used
The mechanical support for the active exoskeleton was designed using Solidworks 2015 from Dassault Systèmes, and the software’s finite element analysis module was used for simulating static loads. The MakeHuman open source software was also used to export anatomically correct three-dimensional (3D) human models into Solidworks.
Materials
The material chosen was Aluminum 6061 T6 with a typical yield strength of 275 MPa. The fatigue limit under cyclic load is 97 MPa for 500 million reversed cycles. The aluminum alloys are typically easy to machine in computer numerical control (CNC) fast prototyping having a lower weight than other metals. This specific alloy was chosen for its relatively high yield strength together with a low cost. The higher yield strength the material has, the smaller the frame can be.
The material selection took the price and accessibility into consideration to produce a functional prototype at a later stage of the project. For a functional prototype, each component would need to be machined using CNC. Although the cost for CNC in general is high, the chosen material has a low cost and can be easily and rapidly machined compared to other metals.
Design cycle and restrictions
The exoskeleton’s mechanical frame was designed with the following objectives:
Be able to support itself in order to not encumber its user;
Avoid direct contact with zones close to the bone and use zones with muscles as “cushion” in order to avoid injuries;
Low volume and weight;
Avoid tight protrusions and indentations. The prototype is designed to eventually be produced through fast prototyping, so the components must be “machinable”;
Avoid expanding the user’s “personal area” in order to keep a slim profile and avoid accidents like the user unintentionally bumping into objects or other people;
Allow the user to have, to a certain extent, all degrees of freedom (DOFs) that are present in the hip, knee, and ankle joints. This allows the user to perform a more natural gait and to be able to traverse different types of terrains;
Modular approach with several components that can connect through variable distances. This allows the same exoskeleton to be adaptable to several body types.
The exoskeleton’s mechanical frame design went through a cyclical development in order to reach an optimal form, as shown in Figure 3.

Cyclical development diagram for the mechanical frame design of the active exoskeleton.
The several components were designed through Solidworks. A human 3D model generated through MakeHuman was imported into the program, and the components were gradually assembled around the imported model. With this procedure, the assembled components were guaranteed to fit closely to the human model while also following the objectives mentioned above. The procedure was repeated for several different human bodies in order to develop a system that can be used by people with different body measurements, as shown in Figure 4.

Exoskeleton adaptable to a smaller female body to the left and a larger male body to the right, in the foot and ankle areas.
According to a study performed by Andriacchi et al., 28 the maximum torque value obtained for hip extension during stair climbing is 123.9 N m for a subject weighting 83 kg while climbing two stairs. For an active exoskeleton that assists hip flexion and extension, this activity was used to simulate a “worst-case scenario.” This way, the exoskeleton is supporting the whole weight of its user while climbing a relatively tall stair with one leg. The Solidworks’ Finite Element Simulation was used in a static study.
While fixing the geometry at the belt and knee zones, a torque of 200 N m was applied at the hip. It was assumed a hip flexion of 70° between the leg and the frontal plane. Since the exoskeleton is meant to assist the work produced by functional muscles and not to replace them, this process allows for a safety margin. Furthermore, the forces applied by the exoskeleton to the buttocks and lower back, abdominal region, and upper leg are dictated by the torque applied from the actuators, which can later be programmed in accordance with the mechanical stress that the exoskeleton can handle. This process was progressively repeated while adding each new part to the assembly between the hip and the knee, to be able to identify and redesign the parts that would show von Mises stress values close to the material’s limit of 275 MPa. Between the knee and the foot, the exoskeleton is only passively supporting the weight of its own frame, so the stress values are negligible.
For each joint, the exoskeleton was designed to embed bearings that are available in the market and to ensure a long-term and predictable operation. The hip and ankle joints use radial spherical bearings from Schaeffler to allow for a large diversity of movements, such as hip abduction/adduction and ankle inversion/eversion. The added DOFs permitted by spherical bearings allow the user to perform a natural gait and to traverse non-leveled terrain. The knee joints use regular linear bearings.
During a future stage of this project, padded zones will be studied to provide contact between the human body and the exoskeleton, to avoid injury and increase comfort.
Results
The current exoskeleton design can be adapted to several human body types, and the presence of a continuous material between the hips and the feet guarantees that it will support its own weight.
For each leg, the mechanical frame comprised a total of 37 uniquely designed components and four bearings, and the total weight is 4.7 kg. Therefore, the mechanical frame’s total weight is 9.4 kg. The hip joint supports 3°DOFs: actively assisted extension and flexion plus non-actuated 17° abduction, adduction, and rotation due to the spherical bearing. The ankle joint supports also 3 DOFs: plantarflexion and dorsiflexion, and the spherical bearing allows for further 16° of inversion, eversion, and axial rotation. The knee joint supports 2 DOFs: flexion and extension. Therefore, the system provides 7 DOFs for each lower limb. An example of the exoskeleton adapted to the generated 3D model of a human female with a height of 155 cm can be seen in Figure 5.
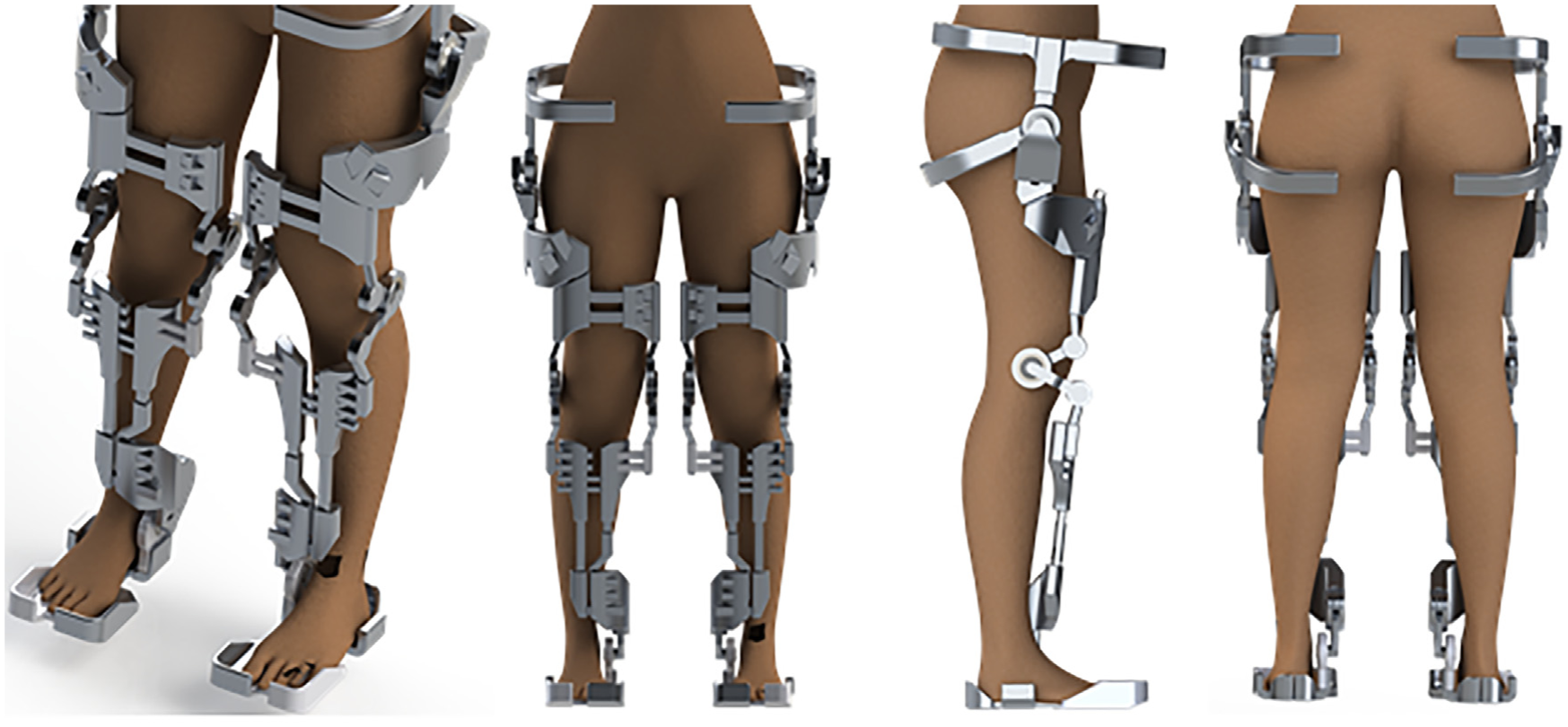
Mechanical frame for the gait assist active exoskeleton assembled with the 3D model of a female body.
Using the static simulations described in section “Materials and methods,” the maximum von Mises tension obtained in this simulation was 133 MPa (Figure 6), which is well below 275 MPa yield strength for the chosen material, Aluminum 6061-T6. The maximum displacement was 0.45 mm.

Finite element method simulation results from a 200 N m torque applied at a hip component, representing the maximum hip extension force while climbing a stair. The fixed geometry is represented by the orange arrows and the torque is represented by the pink arrows. The red arrow represents the gravity acceleration.
Discussion and future work
With the mechanical design completed, the following stage will consist of porting the mechanical frame to the OpenSim software to perform biomechanical kinematic simulations of the exoskeleton with existing musculoskeletal models (Figure 7). This stage will be used to determine the force that needs to be applied by the actuators, which in turn will lead to the choice of the actuator type and model to implement. This approach has been observed in other studies regarding active exoskeletons.29,30

Example of multibody simulation with the exoskeleton using the OpenSim software.
However, there are modifications that could improve the current design. The mechanical frame’s “foot” does not support flexion and dorsiflexion for the toes. Since this is a natural movement performed through healthy gait, it should ideally be replicated by the exoskeleton. On the other hand, it could also bring a substantial increment of complexity in that zone, and this movement is also often prevented by a large range of footwear for both genders. Therefore, the necessity for this change in design will be evaluated at a later stage.
Although the mechanical frame was designed around different body types, it should also be compared to data found in studies regarding anthropometric measurements’ studies. 31 This comparison should be done thoroughly in the future in order to establish a reliable percentile of the elder population that would fit in the exoskeleton.
The human–machine interface is planned to be implemented through surface electromyography (sEMG). This method has been thoroughly studied for both prostheses and orthoses or exoskeletons 32 for being non-invasive and not expensive. Since the scope of the exoskeleton is to assist the daily activities of elders with a weakened musculoskeletal system but functional myoelectric activity, the sEMG presents an ideal method of interface. By reading the myoelectric activity from the gluteus maximus, it is possible to read the user’s “will” to perform hip extension, and the same can be done with rectus femoris and fascia lata muscles to determine the hip flexion. These muscles are close to the skin, so their myoelectric activity can be read with sEMG without concerns over large crosstalk from other muscles. A set of gyroscopes is also planned to be used to determine the rotation angle between each joint.
By adopting a proper control software through a microcontroller that obtains the sEMG data and commands the DC motors, it may be possible to attain a seamless user control with little training required. Although the aforementioned muscles for sEMG readings are large and rather easy to identify through palpation and visual observation, a thorough explanation and easy method for electrode placement must be provided to the users, as this factor is critical for the intended interface.
After determining the actuator and control systems, a functional prototype will be produced in order to test the device and eventually proceed to clinical trials and certification processes.
Conclusion
Compared to other approaches for developing active exoskeletons, the reduced scope and the adopted cyclical development through component design around existing 3D human models have allowed for a mechanical support that can fit several body shapes and sizes while staying close to the body. The reduced frame and “close fit” of the exoskeleton should allow the system to be worn beneath loose clothes, as proposed.
A performance evaluation for daily life activities is a work in progress and will depend on the multibody simulation results using OpenSim discussed in section “Discussion and future work.” Although the finite element method (FEM) simulations show that the muscle activity that causes hip flexion and extension can be fully replaced by the exoskeleton, the increased weight will cause an additional effort on the knee and ankle joints and respective associated muscles.
The hip movement assistance may not compensate for the increased effort in the other joints for one or more daily life activities. In this case, additional functionalities like passive brakes, spring mechanisms, or actuators will be considered for the knee and/or ankle joints.
A limitation of this work so far is that it experimental validation and wearability tests cannot be made without producing a functional prototype. This stage of research is set for starting after the studies performed using OpenSim, which will determine the performance characteristics of the system.
The functional prototype of this system and other projects that stem from this design could present a solution for many cases of gait impairment, extending an active and more comfortable life for a substantial percentage of Europe’s aging population. This approach could also be the basis to explore a currently untapped market.
The mechanical frame design has currently reached a validation level that can be considered appropriate to be taken to the next step of the gait assist active exoskeleton’s development.
Footnotes
Acknowledgements
The authors would like to thank the “Ministério da Ciência, Tecnologia e Ensino Superior—Fundação para a Ciência e a Tecnologia, Portugal” for the funding provided by the research project “LAETA—UID/EMS/50022/2013.”
Handling Editor: Henrique Almeida
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.