
Abstract
This article presents a double-integral sliding-mode controller with an adaptive proportional–integral–derivative observer for brushless direct current motor speed controller. First, an integral sliding-mode control is designed based on the motor dynamic model and system uncertainties. Accordingly, a novel double-integral sliding-mode controller is proposed to enhance the steady-state performance by employing the double-integral sliding surface with its inherent integral control feature. In addition, the control gains of the double-integral sliding-mode controller can be online adjusted using an adaptive proportional–integral–derivative observer. Thus, the proposed double-integral sliding-mode controller possesses the merits of integral sliding-mode control, proportional–integral–derivative, and adaptive law. An experimental setup including a digital signal processor is applied to verify the brushless direct current motor control system using different control scheme. The measured results show that satisfactory acceleration/deceleration speed tracking and load disturbance speed regulation characteristics are obtained via conventional proportional–integral–derivative controller and the developed integral sliding-mode control scheme under the various testing cases. Moreover, the maximum tracking error can be further reduced more than 50% by adopting the proposed double-integral sliding-mode controller with adaptive proportional–integral–derivative observer.
Keywords
Introduction
In recent years, brushless direct current (BLDC) motor drives have been widely used in applications such as electric vehicles (EVs), industrial robots, and washing machines.1–3 High-performance BLDC control systems have the characteristics of small overshoot, fast response, good tracking precision, and robust anti-disturbance ability. Generally, the parameters of a BLDC motor system are usually assumed to remain constant during operation. And proportional–integral–derivative (PID) controllers are commonly used for various industrial applications due to their simplicity and effectiveness.4,5 However, in practical applications, the mechanical load parameters such as friction and inertia may change depending on the load. Therefore, achieving a satisfactory performance using only linear control algorithms is difficult.
Several studies have attempted to develop advanced control methods for BLDC systems,6–9 such as fuzzy logic control, sliding-mode control (SMC), and neural network–based intelligent control. The fuzzy neural network (FNN) control is found to be a powerful method for the solution of nonlinear control problems and is used to generate and tune fuzzy rules for the BLDC system.6,7 The model-based predictive control (MBPC) is also used to predict future process outputs and optimize future control actions for better response of BLDC system. 8 And the hybrid terminal sliding-mode (HTSM) control scheme for the EV with BLDC is introduced to guarantee both system response and robust stability. 9 These control schemes have improved the performance of the BLDC systems from different aspects.
Among these schemes, the SMC scheme is widely used to improve nonlinear systems with both system parameter variations and external disturbances.10–12 However, SMC has a well-known shortcoming which is the chattering phenomenon of the control effort. A common method to mitigate the chattering is to employ a saturation function to replace the switching function. Although the chattering phenomenon can be reduced by the saturation function, the steady-state error is caused depending on the boundary layer thickness. Accordingly, an integral SMC (ISMC) scheme was proposed for suppressing the steady-state error by applying an additional integral term of the state variable to the sliding surface. The ISMC scheme can achieve higher control performance compared with the conventional SMC scheme.13,14 However, similar to SMC, when the saturation function is applied in the ISMC, the bound of the uncertainty is rather difficult to obtain in advance in practical applications, and thus, it affects the control accuracy.
In this article, after introducing ISMC scheme, a novel double-integral sliding-mode control (DISMC) is proposed for the BLDC speed loop to improve the control performance. The current loops still employ standard PI controllers. For traditional control design for speed loop, the current control loop is usually regarded as ideal and a first-order model is used to express the relation between reference phase current and speed output. In this case, neglecting the current dynamics will degrade the system control performance. Then, a second-order model is adopted for ISMC design to improve the closed-loop performance considering current dynamics.15,16 Accordingly, a novel DISMC is proposed to enhance the steady-state performance by employing the double-integral sliding surface with its inherent integral control feature. In addition, the control gains of the DISMC can be online adjusted using an adaptive PID observer. Thus, the proposed DISMC possesses the merits of ISMC, PID, and adaptive law. The experimental results demonstrate that the developed DISMC has excellent robustness and dynamic response.
BLDC drive system
Figure 1 illustrates a block diagram of the TMS320F28069 digital signal processor (DSP)-based computer-controlled BLDC motor speed control system. The PI controllers

Schematic of the DSP-based BLDC control system.
The developed BLDC system comprises three Hall-effect sensors and an inverter with six insulated-gate bipolar transistors (IGBT) as switching devices for commutation. If the mutual inductance is negligible, the modeling equations can be expressed as 17


where
From equation (2), the motor mechanical dynamic equation can be rewritten as

where

where

where
The inverse Laplace transform of equation (4) is

where

where
Controller design
Standard ISMC scheme
First, let

Then, a conventional integral sliding surface can be designed as 13

where
The globally uniformly ultimate boundedness (GUUB) stability of equation (10) is assured if the control effort

where

where
Ideal DISMC scheme
To improve the system steady-state control performance, a double-integral sliding surface is given as
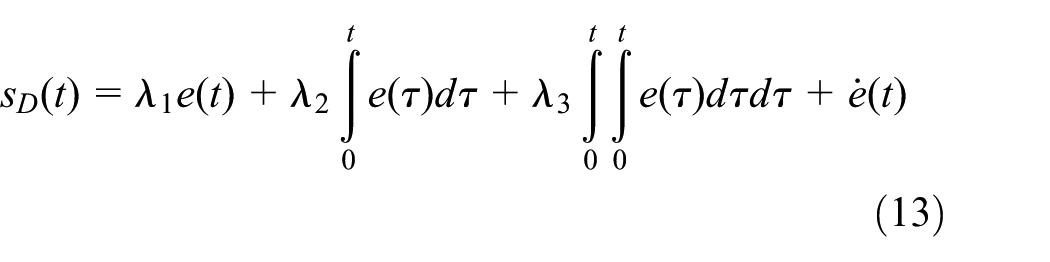
where

To ensure the GUUB stability of the BLDC drive system, the control law of the ideal DISMC is designed as follows

From equation (15), there are three typical operators: (1) differential, (2) proportional, and (3) integral where the parameters

where
Furthermore, if

Adaptive PID observer
To simplify the control system design, the output of the adaptive PID observer can be rewritten as follows

where

where
DISMC scheme
Considering the system dynamic equation represented by equation (6), if the DISMC scheme is designed as in equation (20), which consists of equations (21) and (22), and with the adaptation laws shown in equations (23) and (24), the stability of the control system can be guaranteed, that is





where
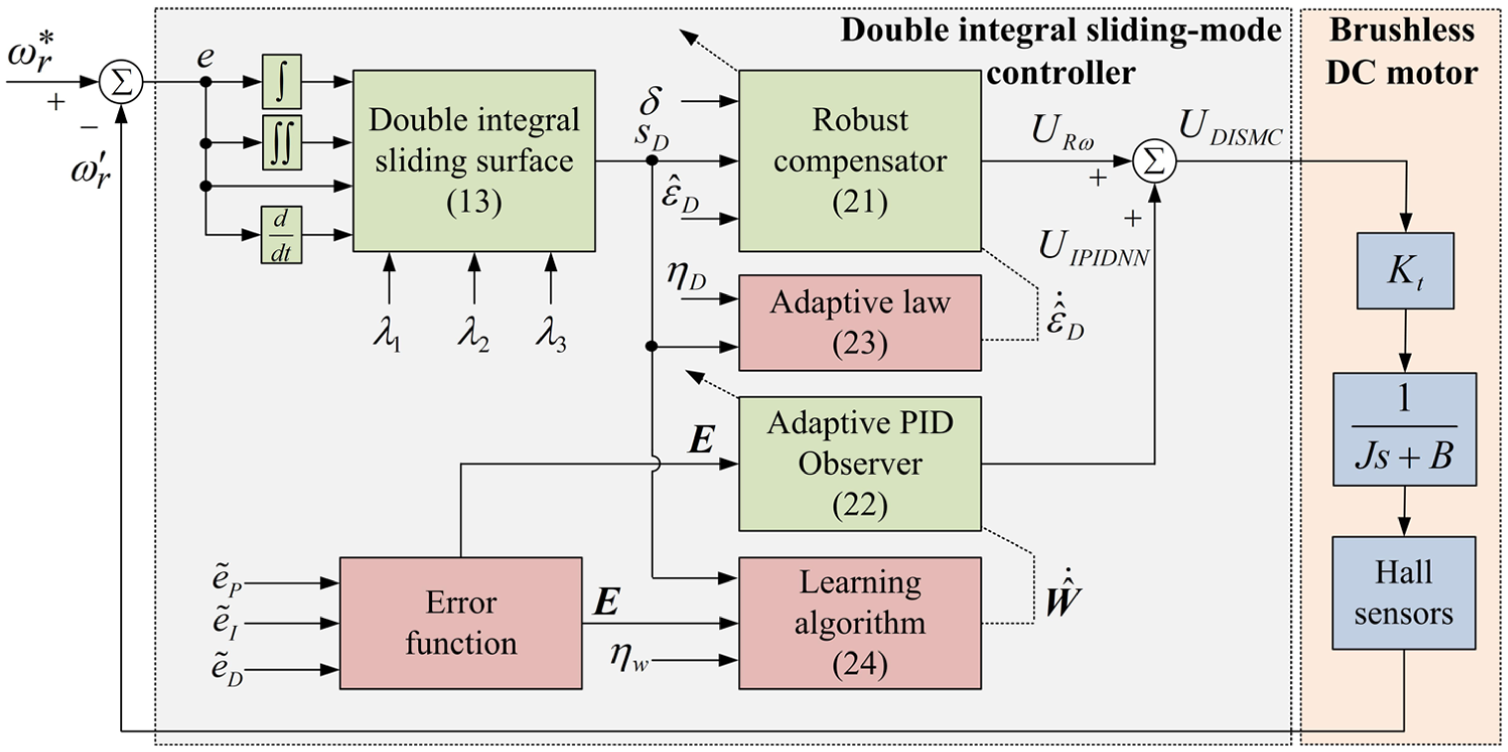
DISMC scheme of BLDC speed control system.
Proof
Let a Lyapunov function candidate be defined as

where

To satisfy

Since

Because

Because
Experimental results
The experimental setup is illustrated in Figure 3. It includes an oscilloscope, a computer, a BLDC motor, a generator with loading, an inverter, control circuits, and the TMS320F28069 DSP. The TMS320F28069 DSP is equipped with a 16-bit CPU with 80 MIPS performance, 8 channels of 16-bit pulse width modulation (PWM) resolution bits, and 16 channels of 12-bit analog-to-digital converter (ADC). The BLDC motor parameters are measured and listed in Table 1.
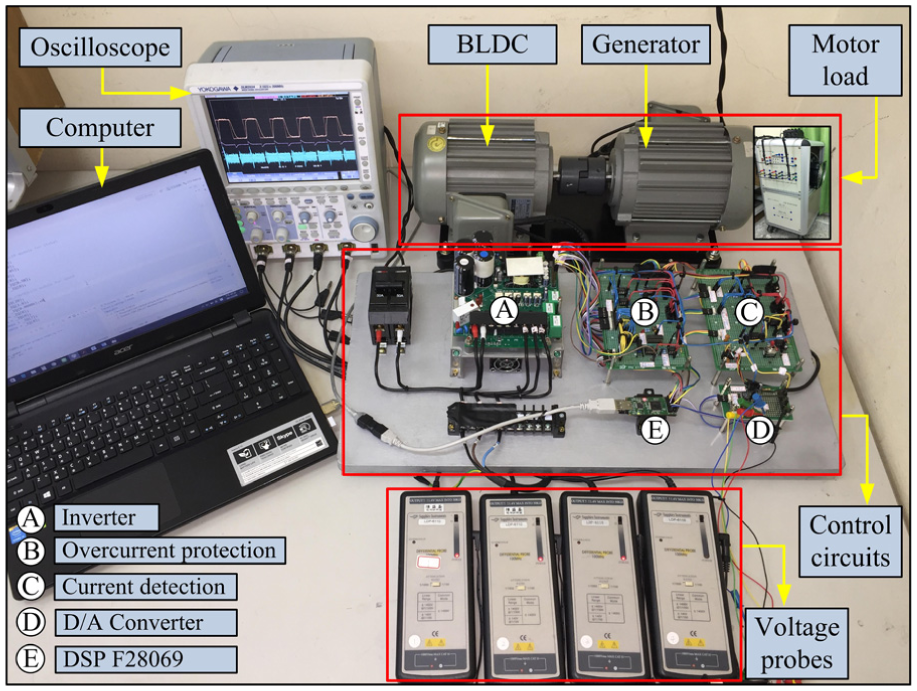
Experimental test setup.
BLDC motor parameters.

BEMF: back electromotive force; BLDC: brushless direct current.
The control parameters of the ISMC and DISMC are designed as follows

In the experiment, all of the control parameters in the developed control scheme are chosen to achieve the best transient and steady-state control performance levels by considering the requirement of stability. Moreover, to evaluate the effectiveness of the proposed DISMC scheme under different speed command profiles and load conditions, two cases are considered as shown in Table 2. And the commonly used PID and ISMC schemes are also developed in this article for the comparative study.
Two cases for the experimental evaluation.

For operation condition Case I, a periodical step reference trajectory with load resistance
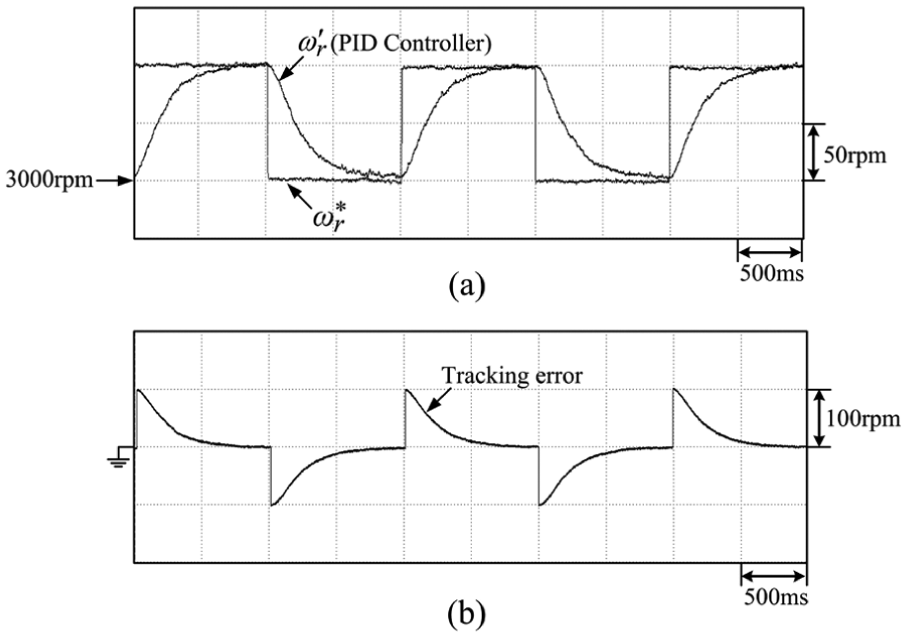
Experimental results of the PID scheme under Case I: (a) tracking response for periodical step reference trajectory and (b) tracking error for periodical step reference trajectory.

Experimental results of the ISMC scheme under Case I: (a) tracking response for periodical step reference trajectory and (b) tracking error for periodical step reference trajectory.

Experimental results of the DISMC scheme at Case I: (a) tracking response for periodical step reference trajectory and (b) tracking error for periodical step reference trajectory.
As to the operation condition Case II, the speed command

Experimental results of the PID scheme under Case II: (a) tracking response for step change in load resistance and (b) tracking error for step change in load resistance.

Experimental results of the ISMC scheme under Case II: (a) tracking response for step change in load resistance and (b) tracking error for step change in load resistance.

Experimental results of the DISMC at Case II: (a) tracking response for step change in load resistance and (b) tracking error for step change in load resistance.
To further illustrate the improved control performance of BLDC motor control system using DISMC scheme, the measured maximum tracking error values under Cases 1 and 2 are listed in Table 3. It can be observed that under conditions of motor parameter uncertainties and external load disturbances, the performance of the proposed DISMC control scheme could be more effectively improved with that of the PID and ISMC schemes.
Performance measurement of maximum tracking error of the developed BLDC motor control system.

BEMF: back electromotive force; BLDC: brushless direct current; PID: proportional–integral–derivative; ISMC: integral sliding-mode controller; DISMC: double-integral sliding-mode controller.
Conclusion
In this article, the conventional PID, ISMC, and DISMC scheme are successfully developed for BLDC motor speed control. The DISMC scheme using the double-integral sliding surface scheme and the designed control law with integral control term can reduce the steady-state errors more effectively. And an adaptive PID observer is also developed for the DISMC scheme to online adjust the control gains, thereby achieving favorable tracking and regulation performance. Therefore, the developed DISMC scheme could guarantee the accurate and fast speed tracking and regulation despite the variations in BLDC motor parameter and external load disturbances. The experimental results show that satisfactory acceleration/deceleration speed tracking and load disturbance speed regulation characteristics are obtained via conventional PID controller and the developed ISMC scheme under the various testing cases. Moreover, the maximum tracking error can be further reduced more than 50% by adopting the proposed DISMC with adaptive PID observer.
Footnotes
Handling Editor: Ling Zheng
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.