
Abstract
A novel approach named active–disturbance–rejection–control (ADRC) and fractional–order–proportional–integral–derivative (FOPID) hybrid control scheme is proposed for hydroturbine speed governor system, which is based on ADRC and FOPID control methods. By combining the advantages of ADRC and FOPID controllers, the proposed ADRC–FOPID hybrid control scheme can actively reject the unpredictable disturbance, even with random noises, and can be adapted to the nonlinearities as well as unknown dynamics of hydroturbine speed governor system. The control performances of ADRC–FOPID, ADRC, FOPID as well as conventional proportional–integral–derivative (PID) controllers have been compared. And ADRC–FOPID has been proved to be an effective control scheme for hydroturbine speed governor system.
Keywords
Introduction
Hydropower is an important and vital renewable energy resource, which converts the energy in flowing water into electricity. Usually, a typical hydropower plant consists of water tunnel, penstock, surge tank, hydraulic turbine, speed governor, generator, and electrical network. However, a hydropower plant is a complex system in which hydrodynamics and mechano-electric dynamics are all involved in such a nonlinear dynamic system. 1 Moreover, hydroturbine speed governor systems are multi-parameter, high-dimension complex systems with nonlinear, time-varying, and non-minimum phase characteristics. Although in modern hydropower plant, the conventional proportional–integral–derivative (PID) controller is widely applied in hydroturbine speed governor system,2,3 it still needs a much more effective and reliable control law for hydroelectric power plant. 4 Many control methodologies have been reported for improving the performance of hydroturbine speed governor systems in the past decades. Chen et al. 5 applied an intelligent integral control strategy by fuzzy logic. Zhang and Wang 6 proposed a neuron model-free control method for hydroturbine speed governor. Djukanovic et al. 7 presented neural network (NN) coordinated control for both exciter and governor for low head power plant. Gui et al. 8 proposed a new nonlinear robust control strategy for a hydroturbine governor based on differential geometry theory and the nonlinear robust control principle. Jing et al. 9 proposed a control strategy for the regulation of a hydroelectric turbine that is achieved using a discontinuous controller and incorporating a three-state valve and fuzzy logic for the reliability and the static and dynamic performance of the system. Mahmoud et al. 10 designed a new fuzzy logic controller to control a hydropower plant that has several hydraulically coupled turbines. Wang et al. 11 presented a kind of hybridized control system based on genetic algorithms and fuzzy NNs to control hydroelectric generating units. Eker 12 presented a robust single-input multi-output design approach for speed control of hydro-turbines. Munoz-Hernandez and Jones 13 applied generalized predictive control (GPC) to a multivariable model of the Dinorwig pumped-storage hydroelectric power station. Natarajan 14 designed and analyzed a robust PID controller for a hydraulic turbine generator governor using a frequency-response technique. Husek 15 presented a PID controller design procedure for a hydraulic turbine generator governor meeting sensitivity margin specifications.
However, in reality, the highly nonlinear characteristics of hydroturbine speed governor system make it difficult to obtain an accurate model. On the other hand, fuzzy logic and artificial NN is usually quite complex and take a long time to develop. In addition, these solutions are not portable, that is, the control algorithms cannot be easily adjusted and reused for a different problem.
Recently, more and more researchers have reported their achievements related to the theory and application of fractional-order controller in many fields of science and engineering,
16
especially to enhance the performance of conventional PID controller using the concept of fractional calculus, where the orders of integral and derivative are non-integer.
17
Fractional-order proportional–integral–derivative (FOPID or
As a nonlinear control technology, active disturbance rejection control (ADRC), first proposed by Han in 1995,28,29 aims to design controller for nonlinear uncertain system, which learns from the advantage of traditional PID controller. ADRC has the unique characteristics of model independence and it can actively reject both internal and external disturbances. 30 The basic idea of ADRC is using an extended state observer (ESO) to track or estimate the plant dynamics and unknown disturbance in real time and dynamically compensate for it. Recently, ADRC has been applied in various engineering fields. Sun and Gao 31 presented the design and implementation of an advanced digital controller for a 1-kW H-bridge DC–DC power converter based on the active disturbance rejection concept. Li et al. 32 proposed to design an ADRC control algorithm for the antenna pointing control of a large flexible satellite system. Zheng et al. 33 presented to drive the axis of a micro-electro-mechanical systems (MEMS) gyroscope. Xia et al. 34 presented ADRC controller for multivariable systems with time delay. Wu and Chen 35 presented a new fast tool servo-control method for noncircular turning process (NCTP). Vencent et al. 36 described the application of a control technique known as ADRC to superconducting radio frequency (RF) cavities. Su et al. 37 developed a highly robust ADRC controller to implement high-precision motion control of permanent-magnet synchronous motors. Huang et al. 38 designed a first-order ADRC scheme for ALSTOM gasifier. Guo and Jin 39 adopted ADRC and the sliding mode control (SMC) approaches to deal with the stabilization of an Euler–Bernoulli beam system. Liang et al. 40 applied ADRC to the control of superheated steam temperature in large-capacity generation units as ADRC-PID cascade control. Dong et al. 41 proposed a novel design, which is based on the concept of ADRC, of a robust decentralized LFC algorithm for an inter-connected three-area power system. Goforth et al. 42 proposed ADRC for hysteretic systems with unknown characteristics. Madonski et al. 43 applied of a special case of an ADRC in governing a proper realization of basic limb rehabilitation trainings. Zhao and Gao 44 proposed a novel modification of ADRC for time-delay systems. Alonge et al. 45 proposed the ADRC control methodology for motion control systems with induction motor.
Usually, the nonlinearities and unknown dynamics of hydroturbine speed governor system as well as unpredictable external load disturbances always have an unexpected influence on the control performance, therefore, to achieve better control performance is still a challenging problem. Inspired by the literatures mentioned above, a novel approach named ADRC-FOPID hybrid control scheme is proposed for hydroturbine speed governor system, which is designed through a combined ADRC and FOPID control law by exploiting the unique disturbance estimation and compensation concept. By actively rejecting disturbance, ADRC-FOPID can effectively deal with nonlinear, time-varying dynamic, as well as other uncertainties of hydroturbine speed governor system. The computer simulation results show that ADRC-FOPID yields satisfactory system responses even under the conditions with random noises.
The rest of the paper is organized as follows. Section “FOPID controller” briefly describes FOPID controller. Section “ADRC” describes ADRC controller. Section “PID, FOPID, ADRC, and ADRC-FOPID controllers for hydroturbine speed governor system” presents conventional PID controller, FOPID controller, ADRC controller, and ADRC-FOPID hybrid control strategy for hydroturbine speed governor system, respectively. Section “Performance tests for hydroturbine speed governor system” gives the comparison results of computer simulations on an actual hydroturbine speed governor system for ADRC-FOPID, ADRC, FOPID, and conventional PID controllers. Section “Conclusion” finally summarizes the main contributions.
FOPID controller
In general, FOPID controller is an extension of conventional PID controller with fractional calculus. Laplace domain notion is applied to describe the fractional integrodifferential operation. Actually, FOPID controller is an infinite dimensional linear filter, and finite dimensional approximation of FOPID controller should be utilized in a proper range of frequency of practical interest. 46
Usually, the transfer function of FOPID controller can be simply described as

where s is Laplace operator, λ and μ are the non-integer order of integrator and differentiator, respectively, and can be any real numbers. Compared to conventional PID controller, the adjustable parameters of non-integer order of integrator and differentiator provide more flexibility and more possibility to realize the desired control performance. Especially, if
ADRC
The ADRC consists of three main components: tracking differentiator (TD), ESO, and nonlinear controller (NC).29–31 TD provides the desired transient and differential trajectory of set values, ESO estimates the system state variables and the extended state variables, that is, the disturbances of the system, and then NC generates the control law with the nonlinear form. ADRC only needs to know the orders rather than the explicit mathematical model of the controlled plant. The key point of ADRC is directly estimating the system dynamics and the total disturbances which are extended as a new system state in real time using an ESO and then compensating for them.
TD
Considering in a second-order plant,
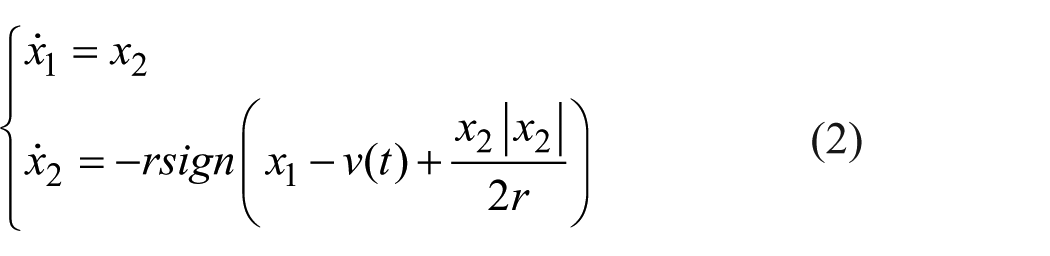
where r is an adjustable and positive parameter that can be selected accordingly to speed up or slow down the transient profile, and
The discrete form is

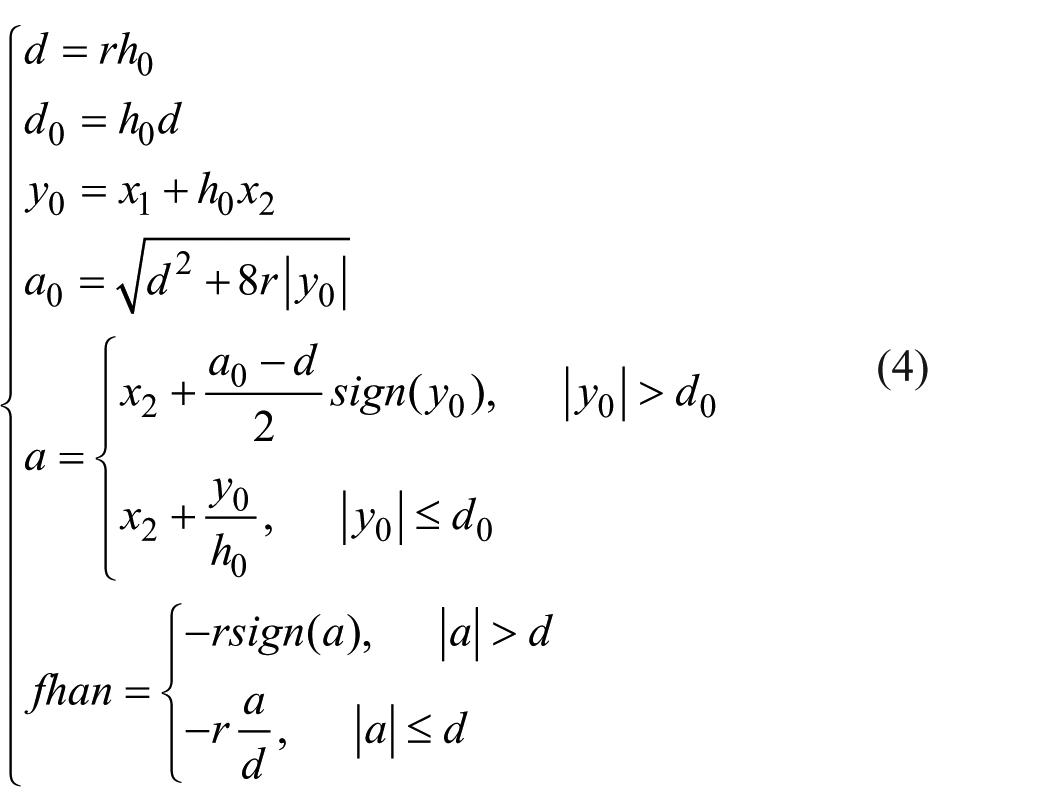
where h0 is the sampling time, in seconds. And the function
ESO
ESO is a nonlinear observer designed to estimate the total disturbance as an augmented state of the system. Considering a second-order control system as
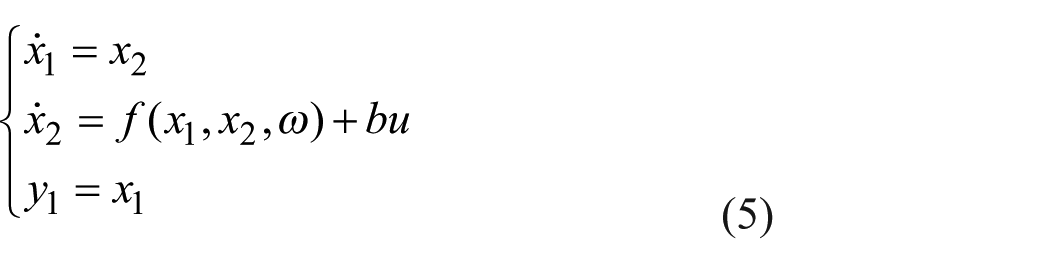
where x1 is the system coordinate, x2 is the first-order derivative of x1, y1 is the system output, b is a constant, u is the control output, w is the disturbance, and function f represents the generalized disturbance which includes the unknown system dynamics and the total disturbances.
The third-order ESO of the plant (5) is constructed as
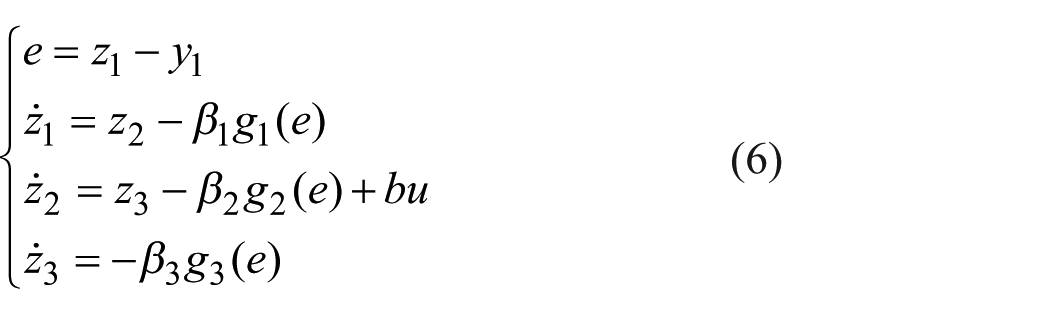
where e is the estimation error;
The discrete form of ESO is
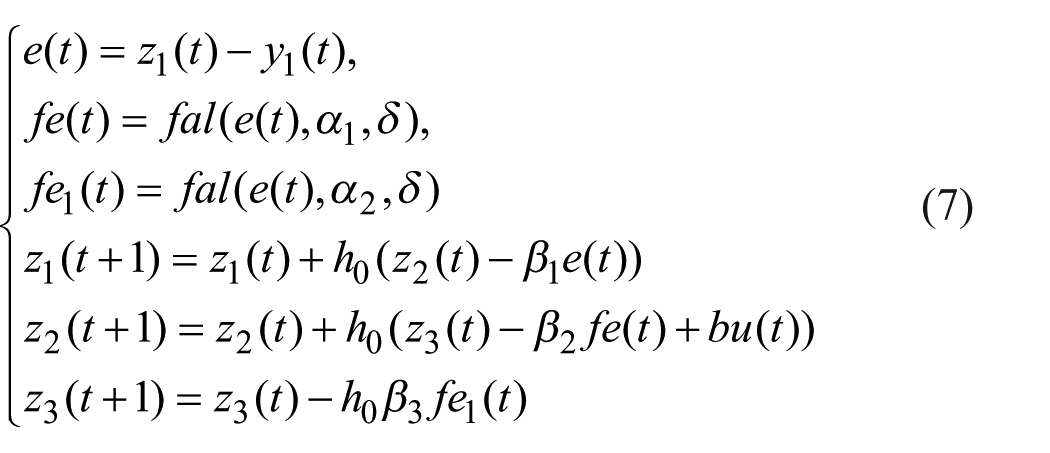
The nonlinear function
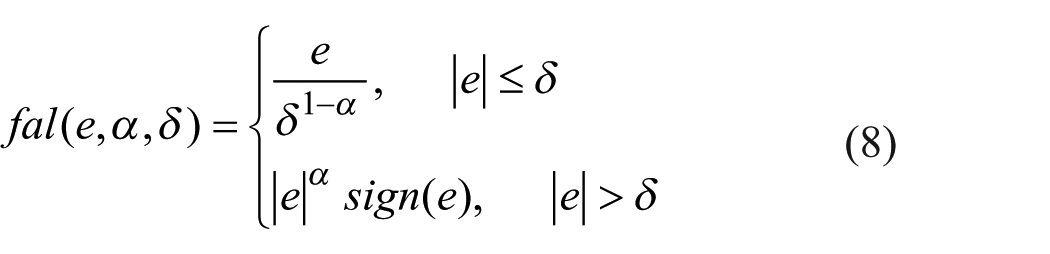
where both
The structure of ADRC controller is shown in Figure 1, where
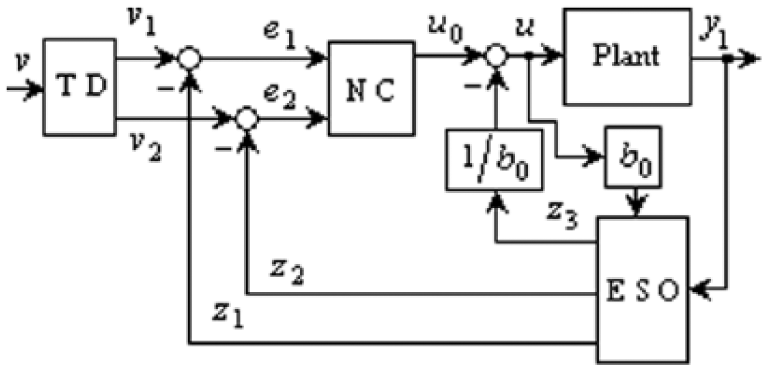
The structure of a second-order ADRC controller.
The inputs of NC, that is,

The parameters of TD, ESO, and NC can be set to obtain the desired performance of the controller.
PID, FOPID, ADRC, and ADRC-FOPID controllers for hydroturbine speed governor system
PID and FOPID controllers for hydroturbine speed governor system
The block diagram of a typical hydroturbine speed governor system with conventional PID control law is shown in Figure 2, which consists of conventional PID controller, electro-hydraulic servo system, hydroturbine system, generator, and load.1–4 As seen in Figure 2, c is turbine speed relative deviation set point, x is turbine speed relative deviation, y
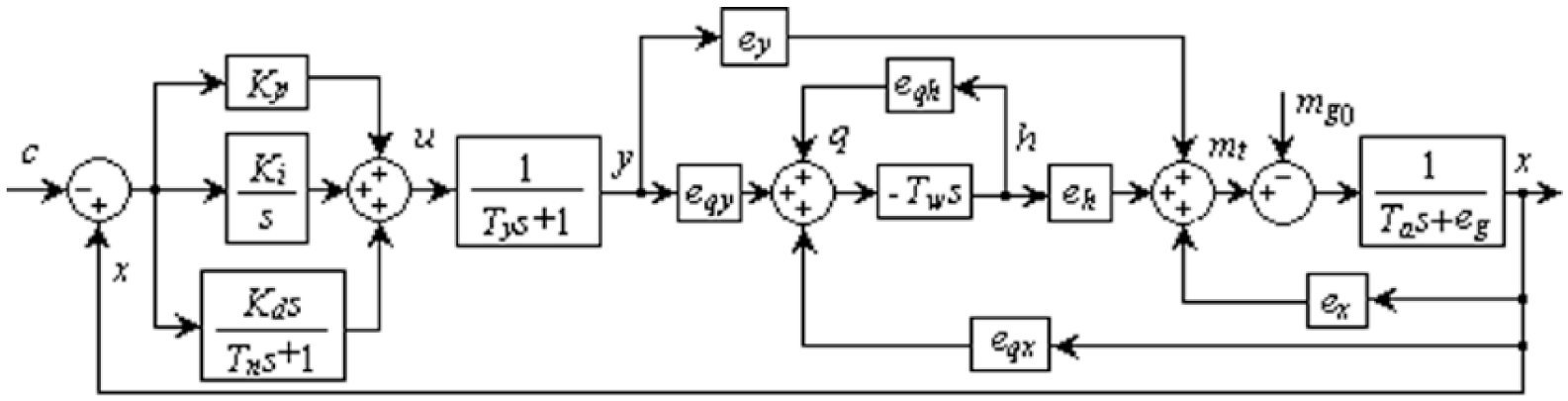
Typical block diagram of hydroturbine governor system with conventional PID control law.
FOPID controller for hydroturbine speed governor system is simply to replace conventional PID controller with the transfer function (1) in Figure 1.
ADRC and ADRC-FOPID controllers for hydroturbine speed governor system
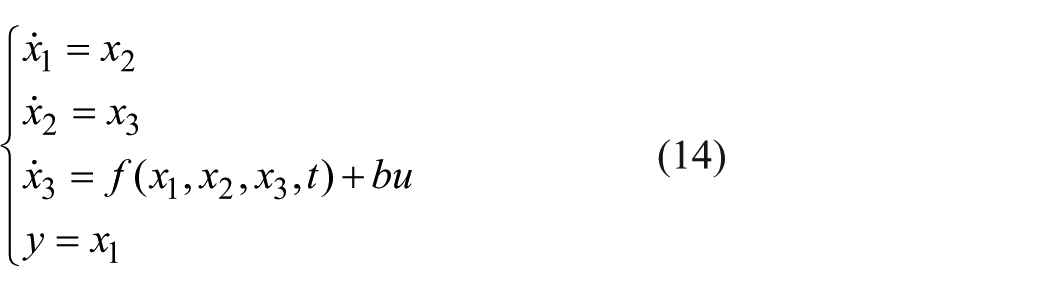
Ignoring eqx, the differential equations of hydroturbine speed governor system without PID control law is
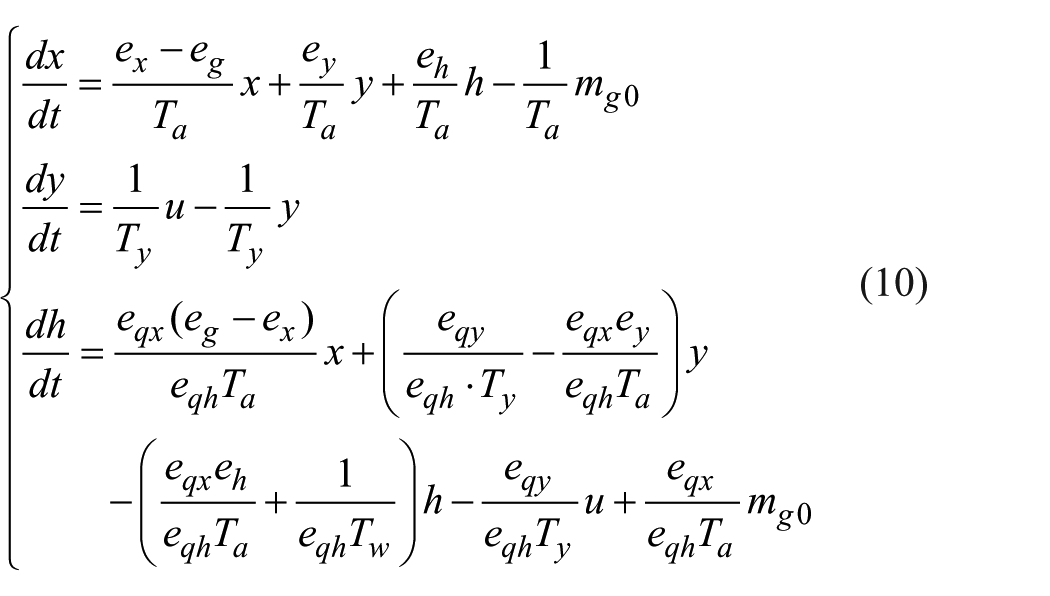
Select three new state variables x1, x2, and x3, where
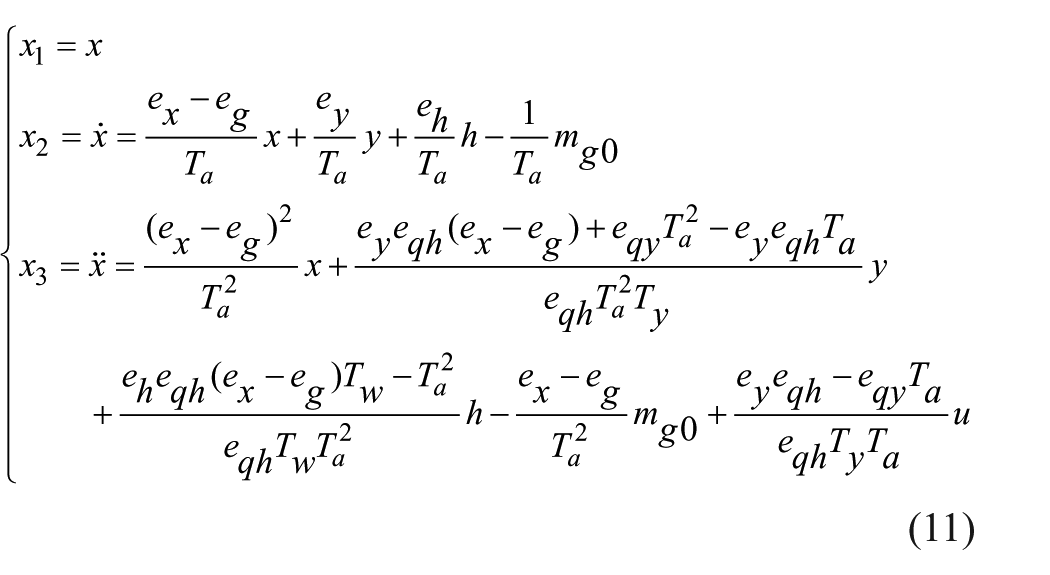
Let
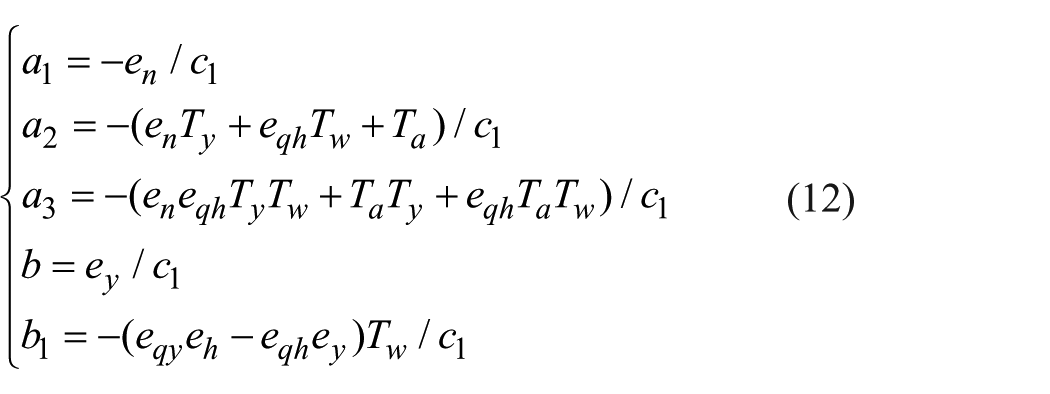
The differential equations of hydroturbine speed governor system can be transformed to
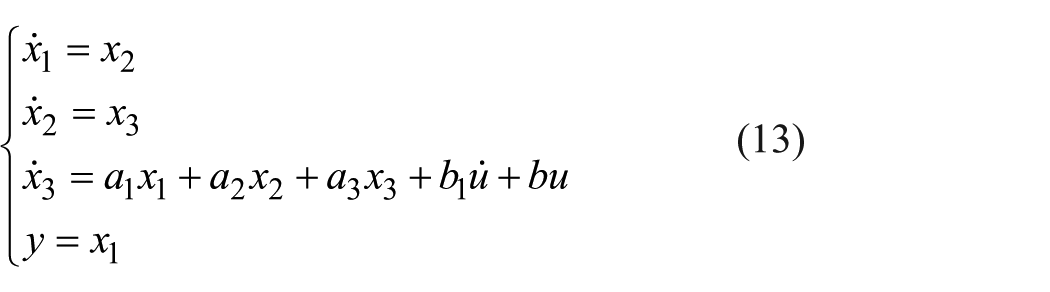
Take
The discrete form of TD for hydroturbine speed governor system is as same as equation (3).
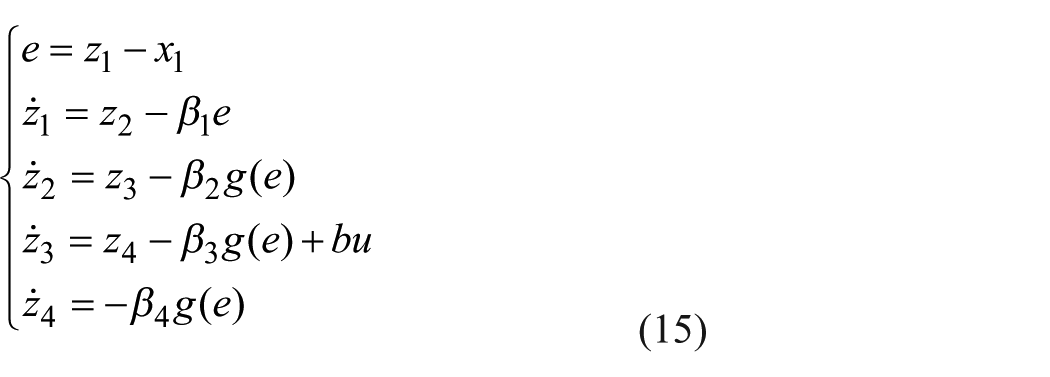
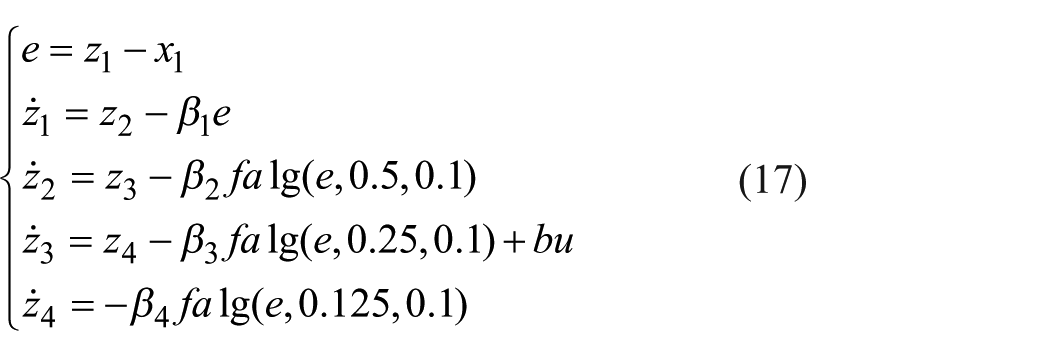
The ESO for hydroturbine speed governor system is
An improved style of the nonlinear function
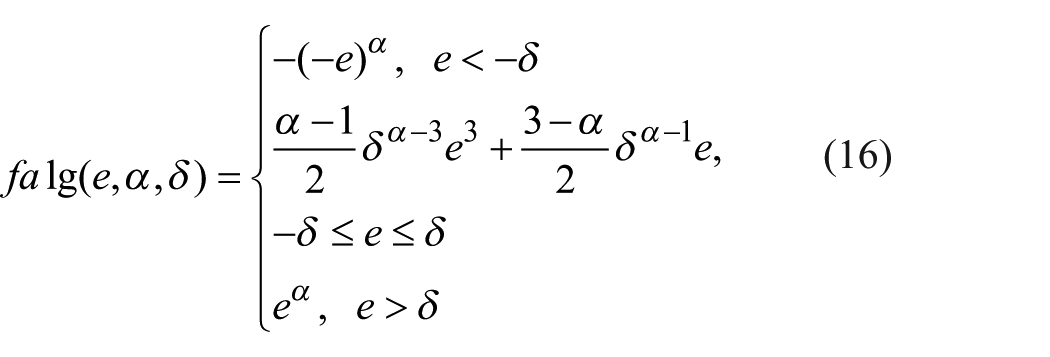
Select
Finally, the ADRC control law which NC is conventional PID control law is

The structure of ADRC controller which NC of ADRC is conventional PID control law for hydroturbine speed governor system is shown in Figure 3, where c1 and c2 are the turbine speed relative deviation set point, in per unit, as well as its derivative, respectively.
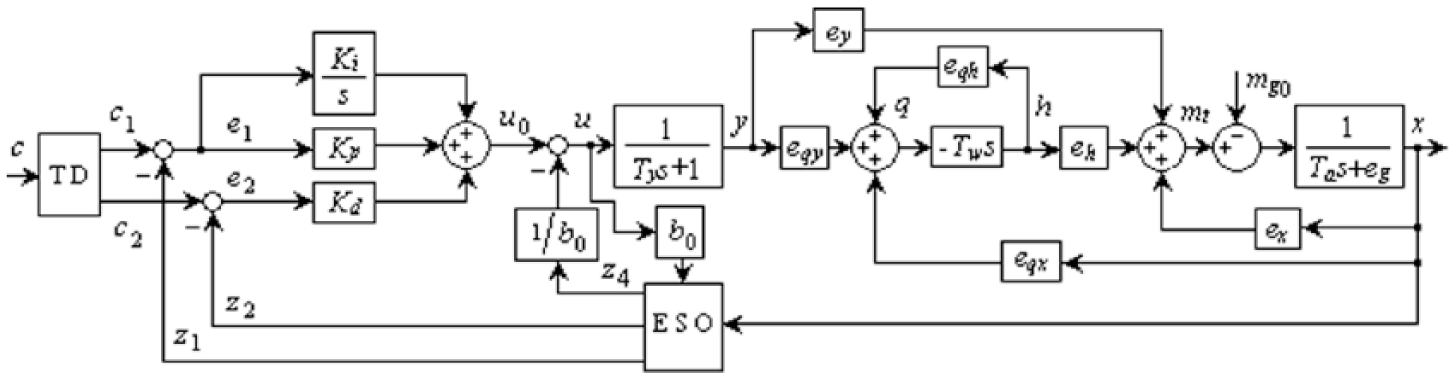
Block diagram of ADRC with conventional PID control law for hydroturbine speed governor system.
In reality, the highly nonlinear characteristics of hydroturbine speed governor system make it difficult to obtain an accurate model. Usually, the nonlinearities and unknown dynamics of hydroturbine speed governor system as well as unpredictable external load disturbances always have an unexpected influence on the control performance.
Since FOPID and ADRC are well-known nonlinear control technologies, and FOPID controller is widely used in the areas of modeling and control, which provides more flexibility of nonlinear characteristics and gives more possibility to achieve control objectives, therefore, in this paper, FOPID controller is applied to construct the NC of ADRC to obtain the proposed ADRC-FOPID controller for hydroturbine speed governor system, finally. Actually, the ADRC-FOPID controller is simply to replace conventional PID control law by FOPID control law in NC, which combines the advantages of ADRC and FOPID controller. The structure of ADRC-FOPID is shown in Figure 4, and the final control law is

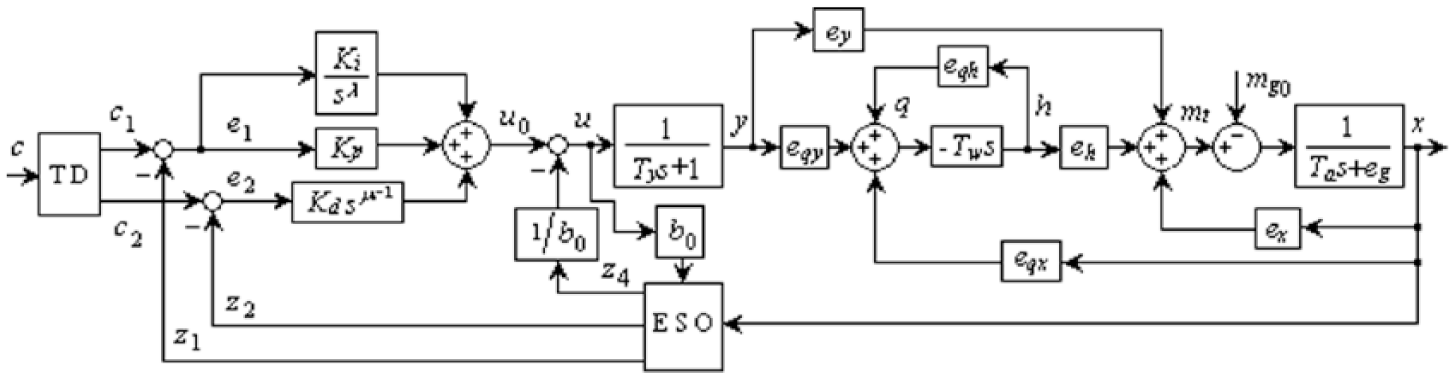
Block diagram of ADRC-FOPID for hydroturbine speed governor system.
Performance tests for hydroturbine speed governor system
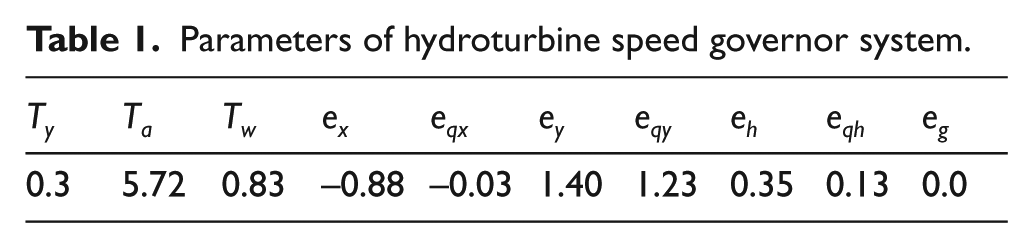
An actual hydropower plant in China, named Chencun Hydropower Plant, is used as an example to verify the performances of the proposed ADRC-FOPID, ADRC, FOPID, and conventional PID controllers. The required data of this hydroturbine speed governor system are listed in Table 1. The parameters of TD and ESO of ADRC and ADRC-FOPID are shown in Table 2.
Parameters of hydroturbine speed governor system.
Parameters for ADRC and ADRC-FOPID.
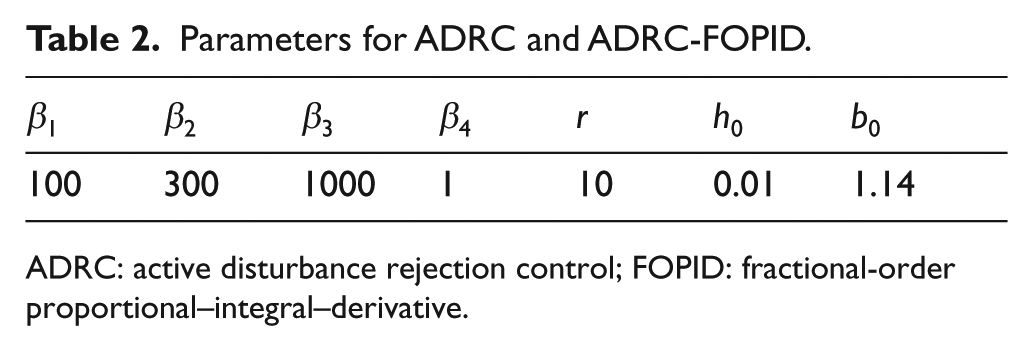
ADRC: active disturbance rejection control; FOPID: fractional-order proportional–integral–derivative.
Actually, any effective controller can yield a good step response that will result in a good performance criterion in time domain, which include overshoot Mp (in per unit), settling time ts (in s), and steady state error (in per unit).
First, a 10% step frequency disturbance (speed increasing) test was performed to compare the performances of ADRC and conventional PID controllers. In this test,
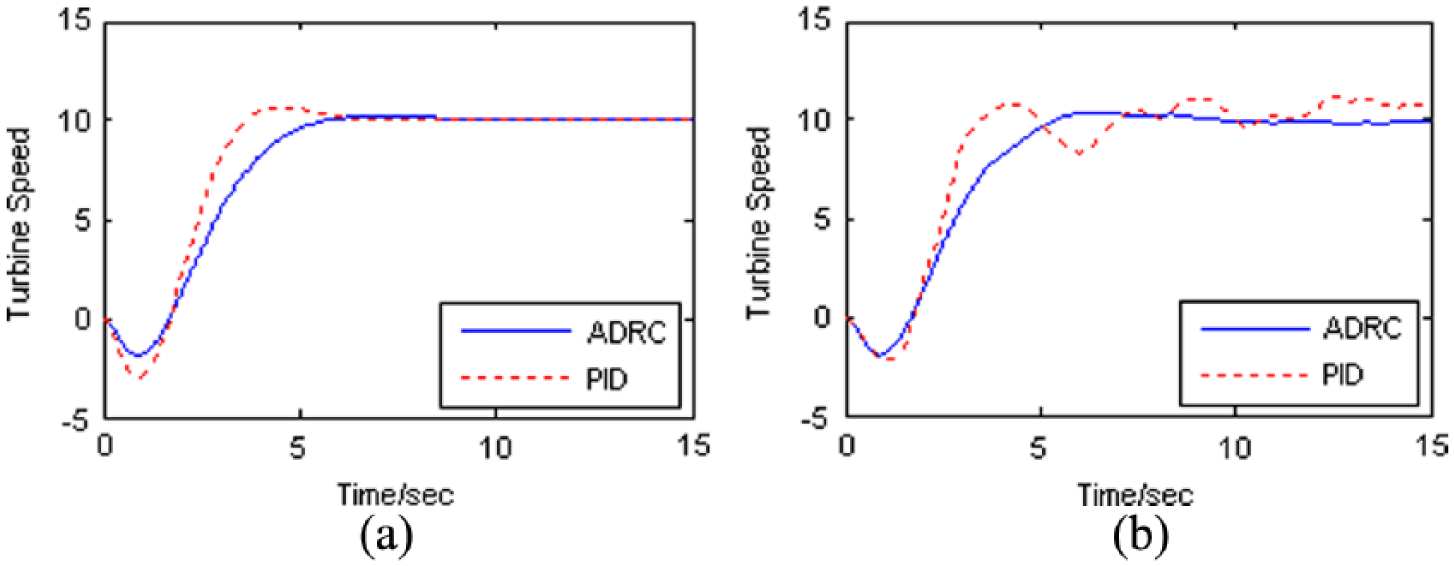
Comparison results of ADRC and PID under 10% frequency disturbance: (a) without random noise and (b) with 3% random noise.
Gains and comparison results for PID and ADRC controllers.
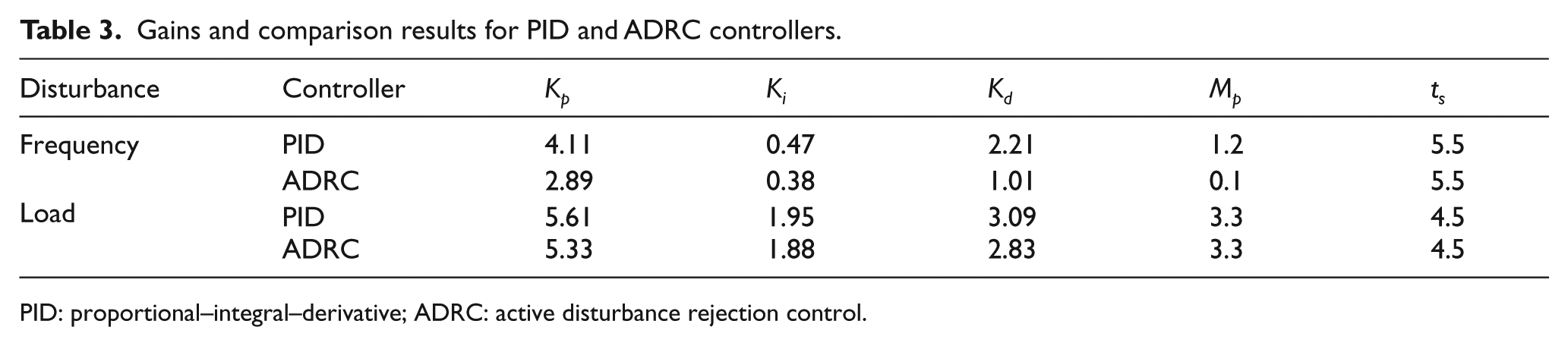
PID: proportional–integral–derivative; ADRC: active disturbance rejection control.
Second, a 10% step load disturbance (load rejection) test was performed. In this test,
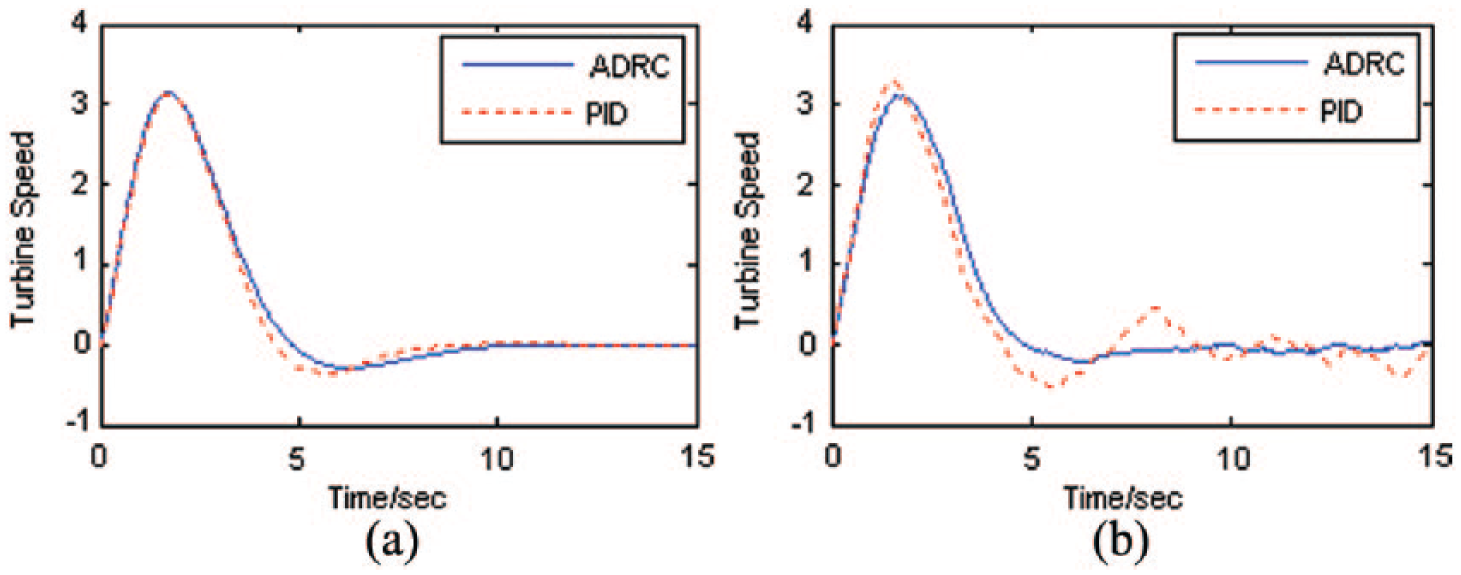
Comparison results of ADRC and PID under 10% load disturbance: (a) without noise and (b) with 3% random noise.
Finally, the comparison results of ADRC-FOPID, ADRC, and FOPID controllers for a 10% step load disturbance test are presented. The traces of comparison results without uniformly distributed random noise, with 3% uniformly distributed random noise as well as with 10% uniformly distributed random noise are shown in Figure 7. The gains and comparison results without uniformly distributed random noise of ADRC-FOPID, ADRC, and FOPID controllers are listed in Table 4. The gains of ADRC-FOPID controller are same as those of FOPID controller, the parameters of ESO and TD of ADRC-FOPID controller are same as those of ADRC controller, which are listed in Table 2, except that
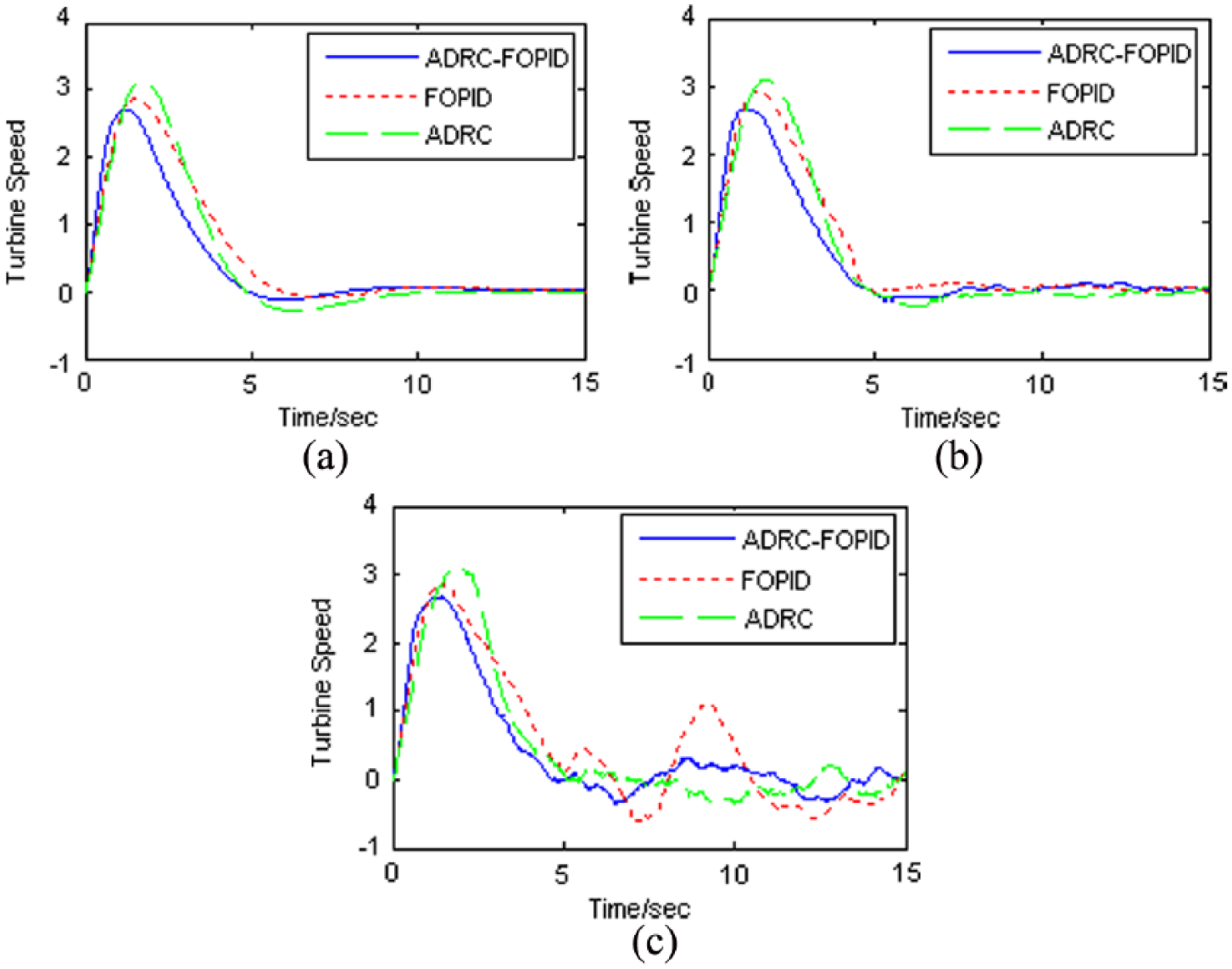
Comparison results of ADRC-FOPID, FOPID, and ADRC under 10% load disturbance: (a) without random noise, (b) with 3% random noise, and (c) with 10% random noise.
Gains for FOPID, ADRC, and ADRC-FOPID controllers.

ADRC: active disturbance rejection control; FOPID: fractional-order proportional–integral–derivative.
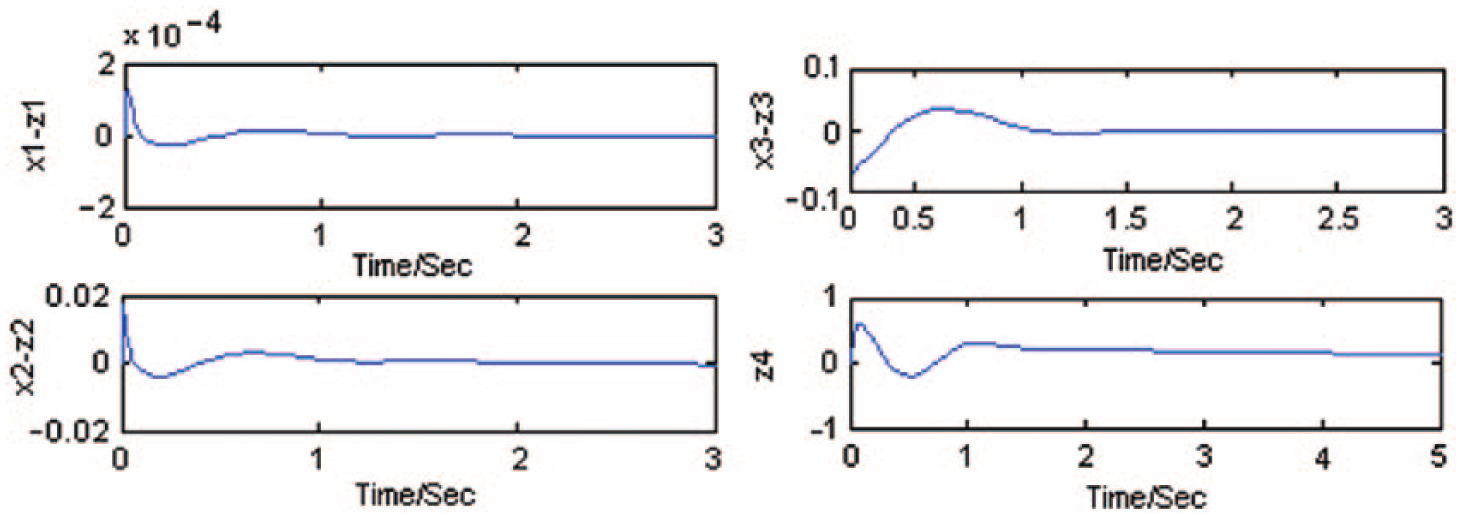
Estimation errors of ESO of ADRC-FOPID.
Conclusion
In this paper, a novel approach based on ADRC-FOPID hybrid control strategy has been successfully applied for hydroturbine speed governor system, which combines the advantages of ADRC and FOPID controllers. ADRC-FOPID has strong ability of active disturbance rejection and more flexibility of nonlinear characteristics of hydroturbine speed governor system, which resolves the contradiction between fast response and small overshoot. The control performance of ADRC-FOPID is compared to ADRC, FOPID, and conventional PID controllers. The computer simulation results show that ADRC controller outperforms PID controller even with random noise because of the strong ability of active disturbance rejection. Without random noise, the best performance is of ADRC-FOPID. FOPID controller generates similar dynamic response to ADRC with relatively lower overshoot but slightly longer settling time. Moreover, under the condition of random noise, the overshoot of FOPID is still smaller than that of ADRC. Furthermore, the performance of ADRC-FOPID controller is still relatively superior to that of FOPID and ADRC controller.
It can be concluded that the proposed ADRC-FOPID control scheme has good capabilities for rejecting disturbances and performs pretty well compared to ADRC, FOPID, and conventional PID controllers. ADRC-FOPID controller is more tolerant of nonlinear dynamics and uncertainties of hydroturbine speed governor system. It can actively estimate the influence of the external disturbance and noise and then compensate for it during each sampling period. Finally, ADRC-FOPID is an effective control scheme for hydroturbine speed governor system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was partially supported by the 111 Project under Grant No.B14022.