
Abstract
This article presents an adaptive sliding mode controller based on global asymptotic convergent observer for attitude tracking problem of a quadrotor unmanned aerial vehicle under modeling uncertainties and external disturbances. For avoiding the singularity problem, the attitude tracking error equations of a quadrotor with quaternion representation are introduced. For obtaining unmeasured states of the control system, a global asymptotic convergent observer without model-based is presented to estimate. To reject uncertainties and disturbances, a new observer-based controller for the quadrotor is designed by combining adaptive sliding mode control algorithm with time-delay estimation method. The stability analysis shows that the tracking errors of the proposed scheme are uniformly ultimately bounded. Simulation results are carried out to illustrate that compared with the existing controller, the proposed control scheme has better attitude tracking performance and higher robustness to reject the disturbances.
Keywords
Introduction
As a kind of the micro helicopter, the quadrotor unmanned aerial vehicles (UAV) have some special advantages, such as vertical taking off and landing, hovering, and rapid maneuvering. As a typical underactuated system, the flight control scheme of the quadrotor UAV is always a focus of the research. 1
Relying on the mathematical model of the quadrotor based on Euler angle representation to
describe the rotational dynamics, various advanced control approaches have been presented
for the quadrotor UAV to guarantee flight performance, such as
proportional–integral–derivative (PID) control,2,3 linear quadratic (LQ) control,
3
flatness-based control,
4
and model reference–based
control.
5
Meanwhile, to reject the disturbances (including parameter perturbations, nonlinearities,
and unknown external disturbances), several robust control schemes such as backstepping
control,6,7 switching model predictive
control,
8
adaptive
control,
9
sliding
mode control,7,10,11 robust motion control,
12
fuzzy control,
13
and some other strategies
have been developed for the quadrotor UAV. In Zhang et al.,
10
a feedback sliding mode controller was
proposed for stabilizing the attitude of a quadrotor aircraft under time-varying
disturbances. In the study of Liu et al.,
12
without depending on the time scale
separation assumption and tracking errors, a robust motion controller was designed for a
quadrotor to cancel out internal and external disturbances. However, the rotational dynamics
of the quadrotor UAV has singularity problem with Euler representation. For avoiding the
problem, some quaternion-based attitude control schemes have been developed to ensure
attitude tracking of the quadrotor UAV.14–17 In particular,
quaternion-based control has been addressed by resorting to the output feedback method for
attitude tracking of the quadrotor UAV.14–16 In the study of Djamel et al.,
17
a quaternion-based attitude optimal
controller was designed for attitude motion of a quadrotor using backstepping and nonlinear
The above controllers have same problem depending on full state feedback. Actually, all state measurements of the quadrotor UAV are not always available. Therefore, some observers and filters have been designed to solve the drawback for quadrotor UAV.18–23 Sliding mode observers have been provided for velocity and disturbances estimation of quadrotor UAV.18–20 In the study of Boudjedir et al., 21 a neural network observer was presented to reject the measurement noise and estimate unavailable states of quadrotor. In the study of Lee et al., 22 a nonlinear disturbance observer was designed for dealing with unknown input gain matrix. In the study of Xiong et al., 23 an optimal Kalman filter was employed to estimate state vector for rejecting white Gaussian process and measurement noises.
Based on the above literature reviews, most of the controllers were developed by imposing on full state feedback. Thus, it is significant to design the control scheme for a quadrotor UAV, which does not depend on all state measurements. This article provides an observer-based adaptive sliding mode control (ASMC) method for attitude tracking problem of the quadrotor UAV under modeling uncertainties and external disturbances. The proposed control scheme is constructed without full state feedback. The controller is well-effective to track reference and high robustness against disturbances. Since the Euler angle representation suffers from singularity problem, the attitude error dynamics model of the quadrotor UAV is constructed using unit quaternion. A global asymptotic convergent observer is employed to estimate the system states. The proposed observer is designed independent of model of system, and its gains are easily obtained. Based on the proposed observer, an adaptive sliding mode controller combined with time-delay estimation technique is designed. The stability analysis shows that the control system is globally asymptotic stable.
This article is organized as follows. In section “Attitude dynamics of a quadrotor with quaternion,” the quaternion-based attitude error dynamics model is introduced. In section “Attitude tracking control design,” the global asymptotic convergent observer is presented, and the observer-based adaptive sliding mode controller is developed. The stability analysis of the closed-loop system is provided. In section “Simulation results,” simulation results are presented. Finally, conclusions are included in section “Conclusion.”
Attitude dynamics of a quadrotor with quaternion
For obtaining the attitude dynamic of the quadrotor UAV, two right-hand frames denoted by

where

for

Schematic of the quadrotor UAV.
For avoiding singularity problem with Euler angle–based representation to describe the
rotational matrix

where
The relation between the quaternion

where the auxiliary matrix
The desired quaternion and angular velocity are defined by
The quaternion error

where the auxiliary matrix
After taking the time derivative of

where the fact has been used that
Attitude tracking control design
The global asymptotic convergent observer design
Defining the estimates

The observer for the attitude of the quadrotor UAV is proposed as

where
Taking the time derivative of equation (7), the equations of the estimation errors can be written as follows

where
Theorem 1
For the observer (8) and system (6) with the bounded uncertainties, if the gain
The proof is presented in “Appendix 1.”
The adaptive sliding mode controller based on the observer design
The control objective is of designing a controller to track the desired trajectory of
attitude without measuring the angular velocity. The reference of the state
In the controller design procedure, the states

where

where
Substituting equations (10) and (11) into equation (6), the closed-loop system can be obtained as follows

If the time-delay estimation error

where
The adaptive law is employed for the ASMC scheme as

where
Theorem 2
For the closed-loop system (6) controlled by equation (13),

where
The proof is presented in “Appendix 1.”
Simulation results
In this section, some simulation results are presented to demonstrate the performance of
the proposed control method. The mass of the quadrotor UAV is 2 kg, and the inertial matrix
of the quadrotor UAV is
The desired quaternion
For verifying the robustness of the proposed control scheme, starting from 2 s, and lasts
1 s, the continuous noises 15 N m is added to the first subsystem
Some simulation results are provided in Figures 2–8.
Figures 2 and 3 show the estimations of

Estimation of the state

Estimation of the state

Estimation errors of the control system states: (a) estimation errors of the state
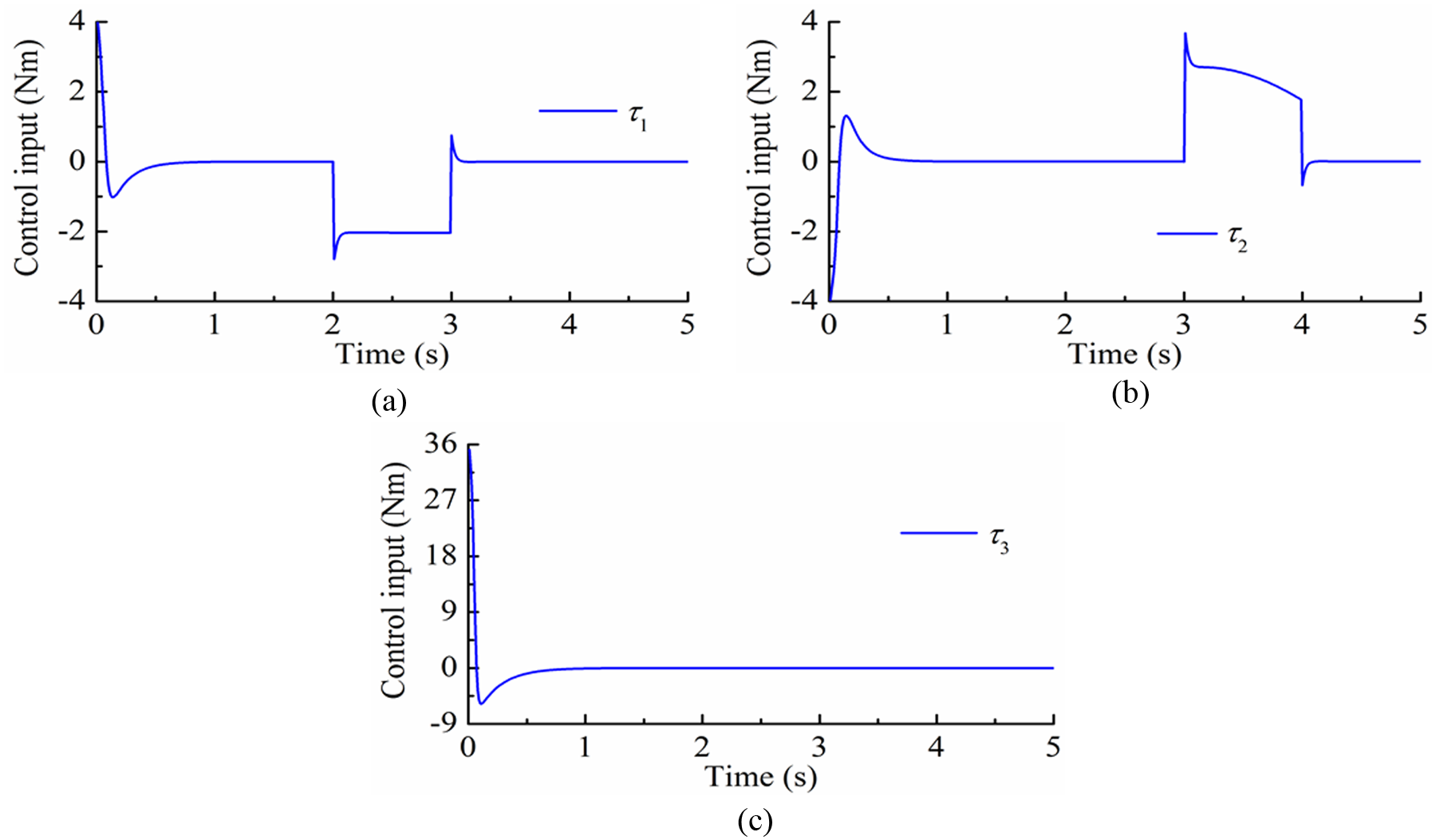
Control input of the proposed scheme: (a) control input

Comparison of tracking results for

Comparison of tracking results for
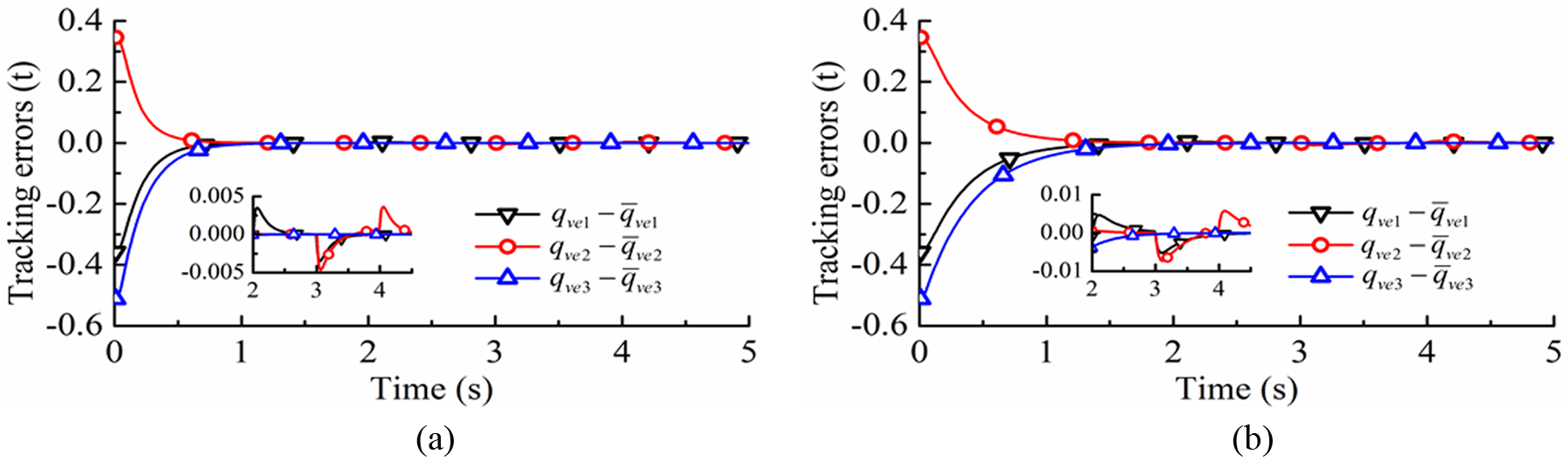
Comparison of tracking errors with different control schemes: (a) tracking errors of the proposed control scheme and (b) tracking errors of the existing control scheme.
Figures 6 and 7 show the comparison of the tracking results for
Conclusion
In this article, an observer-based adaptive sliding mode controller is developed for tracking the attitude of a quadrotor UAV under modeling uncertainties and external disturbances. Using unit quaternion, the attitude error dynamics model of the quadrotor UAV is introduced. A global asymptotic convergent observer which is not sensitive to system model is presented. Based on the proposed observer, compared with time-delay estimation method, an adaptive sliding mode controller is designed. The stability analysis shows that the estimate errors are asymptotic convergent, and the tracking errors are guaranteed to be uniformly ultimately bounded. Numerical simulation results show that the control system can ensure attitude tracking performance and has better robustness to reject disturbances.
Footnotes
Appendix 1
Academic Editor: Mario L Ferrari
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant number 51375080).