
Abstract
This article investigates the attitude tracking control problem for a class of flexible spacecraft with a redundant four reaction wheels’ setting. In this study, inertia uncertainties, external disturbance, wheel torque saturation, and configuration misalignment are taken into account simultaneously. Two types of sliding mode controllers are presented to solve this design problem. First, supposing the norm upper bound of external disturbances, bounds of inertia, and input uncertainties are available, a terminal sliding mode attitude tracking control strategy is developed, where the controller and steering laws are synthesized together. Second, supposing these norm upper bounds are unavailable, an adaptive control law is designed to cope with attitude tracking problem. Under both control schemes, the system trajectory can be ensured to arrive on the specified sliding surface in finite time. Finally, an illustrative example is given to verify the effectiveness of the proposed attitude tracking control methodologies.
Keywords
Introduction
Satellite control systems refer to one of the most significant mechatronics systems, which have received extensive research attention in practical spacecraft engineering. With the development of modern micro-satellite technology, the fast integrated techniques provide feasible way to build low-cost, fast, and light-weight spacecrafts and have been thus widely employed to various space missions including surveillance, Earth imaging, and telecommunication.1–3 Among these fast integrated satellites, plug-and-play satellite is one of the most significant application examples which has attracted considerable research attention. 4 However, in practical control systems, model uncertainty and nonlinearity, inertial uncertainty, external disturbance, control signal delay, and other constraints always exist inevitably,5–9 and actuator alignment errors also occur frequently due to finite-manufacturing tolerance or warping of spacecraft structure. 10 These phenomena may degrade the performances of the spacecraft control systems, and thus, a variety of designed approaches have been developed to investigate robust control design problems.11–16
Among the existing methods for spacecraft attitude control system design, sliding mode control is an effective robust control scheme due to its insensitiveness to matched external disturbances or nonlinearity, which has been thus applied broadly to cope with attitude and/or orbit maneuver and regulation problems.17–19 To mention a few, a quaternion-based attitude tracking control law is proposed for rigid satellite in the presence of unknown inertia matrix. 20 A robust control strategy is developed for rigid body satellite to achieve high-precision attitude tracking, where time-varying mass and unknown external disturbance are considered together. 21 An adaptive sliding mode attitude tracking control scheme is proposed in the presence of actuator misalignment, uncertain inertia, and external disturbance. 10
Although there have been a few published results concerned with attitude tracking control problem of spacecraft with or without consideration of actuator misalignment, inertia uncertainty, and unknown external disturbance, most of the obtained results are only focused on rigid body, while flexible spacecraft has received little research attention.22,23 Moreover, most of the achieved methods are based on the assumption that full knowledge of inertia, faults, or/and disturbance is available to the controller, while these assumptions do not hold in practice due to physical constraints. Moreover, the existing attitude control results mostly only consider the asymptotic stability, that is, the system trajectories converge to zero in infinite settling time. In fact, finite-time stabilization can provide faster convergence to the origin and more appropriate disturbance rejection, which is desirable to be considered in spacecraft control systems design. However, to the best of the authors’ knowledge, the finite-time attitude tracking problem has not been fully investigated for flexible spacecraft with actuator misalignment, unknown inertia, and external disturbance. It is, therefore, the objective of this article to solve this problem by developing two new types of attitude control schemes.
In this article, we investigate the asymptotic and finite-time attitude stabilization problem with simultaneous consideration of the flexible appendage, actuator misalignment, and external disturbance. First, based on the assumption that the bound knowledge of external disturbances and inertia and input uncertainties are known, a finite-time sliding mode control scheme is designed to solve the attitude tracking problem. Second, in the case that these norm upper bounds are unknown, an adaptive control law is designed to revisit attitude tracking problem. In light of both of these control methods, the reachability of the specified sliding surface can be guaranteed in finite time. Finally, a practical example is presented to demonstrate the validness of the designed attitude tracking control strategies.
The remaining part of this article is organized as follows. Section “Problem formulation” formulates the design problem and objective of this article. Section “Terminal finite-time sliding mode control strategy” presents the detailed controller design process. Section “Adaptive sliding mode control scheme” builds illustrative simulation results to verify the effectiveness of the proposed methods. Finally, the conclusion is discussed in section “Numerical simulation.”
Problem formulation
The attitude kinematics
With the representation of nonsingular unit quaternion, the satellite kinematics equation can be described as follows

where

and
Flexible spacecraft dynamics
The total angular momentum of a flexible spacecraft can be represented as

where J represents the inertia matrix,

where

where

denotes the damping and stillness matrices, respectively;
For the four-wheel setting

be the output torque of the reaction wheels, and

In system (2), define an auxiliary state

Substituting equation (3) into equation (2) yields

with the generalized disturbance vector

Recall the relationship of the total control torque with the individual wheel

As a result, system (4) becomes

Attitude-error quaternion–based kinematics and dynamics
Now, considering the kinematics in equation (1), define

Define attitude tracking error

and define the relative velocity

where

From equation (9), we have (note that

Substituting equation (11) into equation (6) yields

Defining

Moreover, the attitude-error quaternion satisfies

To achieve the attitude tracking objective, we make the following assumptions for systems (13)–(14).
Assumption 1. The external disturbance

where
Assumption 2. The uncertain matrix

where
Assumption 3. The inertia matrix is supposed to satisfy

where
Then, the design objective is to make the attitude error and velocity error converge to zero

Terminal finite-time sliding mode control strategy
We define the following sliding mode surface

where
Lemma 1
Consider kinematics system (14) and sliding mode surface (equation (16)) with

with

where
Then,
Proof 1
For dynamic system (13), we define the following Lyapunov function

We now consider the sliding mode surface (equation (16)) with two cases of equations (1) and (2).
When

When

and

As a result, we have

Hence, from equation (16), we have

recalling that

Then, equation (21) is derived as

Note that

which implies that

Note that

Hence, equation (23) implies
In equation (24), consider the term

where

Substituting equations (17)–(18) into equation (24) and considering equation (26) yield

Note that

In equation (28), recalling the definition of term

However, consider the term in equation (27)

Combining equations (29) and (30) yields

Thus, equation (27) becomes
Adaptive sliding mode control scheme
In this section, we will revisit the attitude tracking problem with an adaptive sliding mode control scheme. An adaptive strategy is adopted to estimate the upper bound of the generalized disturbance, and an adaptive control law is integrated with a specific steering law.
We define the following sliding mode surface

where
Lemma 2
Considering the sliding mode surface (equation (31)), the spacecraft dynamics (equation (13)) and kinematics (equation (14)) can be stabilized by the following controller

with an adaptive law

Proof
We define the following Lyapunov candidate

Recalling equations (22)–(23), it is derived that

Assume that

where

Define a new Lyapunov function

where

Note that
Substituting the adaptive sliding mode controller (equation (32)) into equation (40) yields
Note that

Substituting equation (42) into equation (41) yields

To avoid chattering, the saturation function and boundary layer method are considered in controller (equation (32)), and we modify equation (32) as the following form

where
Numerical simulation
In this section, we present a practical example to illustrate the effectiveness of the proposed control approach in this article. The inertia matrix is selected as

and the installation matrix of the reaction wheels is set as

Moreover, the coupling matrix is chosen as

and the external disturbance is set as

The misalignment matrix is set as

The initial attitude is
Figure 1 shows the trajectory of the attitude error, and it can be seen that the attitude tracking can be achieved to a certain degree with initial attitude error and velocity error. Figure 2 presents the velocity error history. It is obvious that the velocity error converges to

The curve of attitude error.
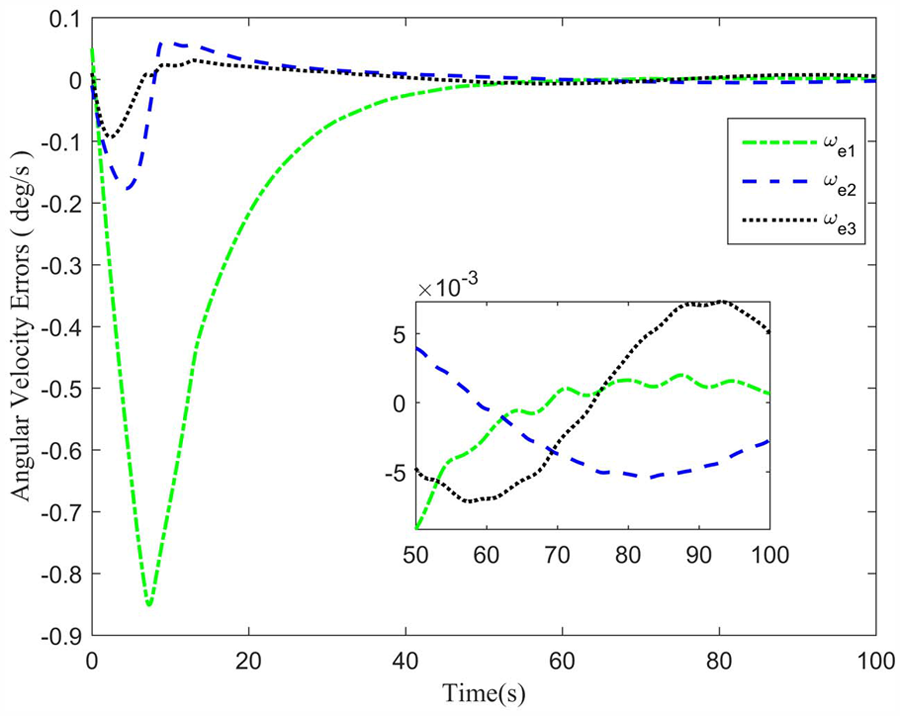
The curve of angular velocity error.

The curve of reaction wheel’s output torque.
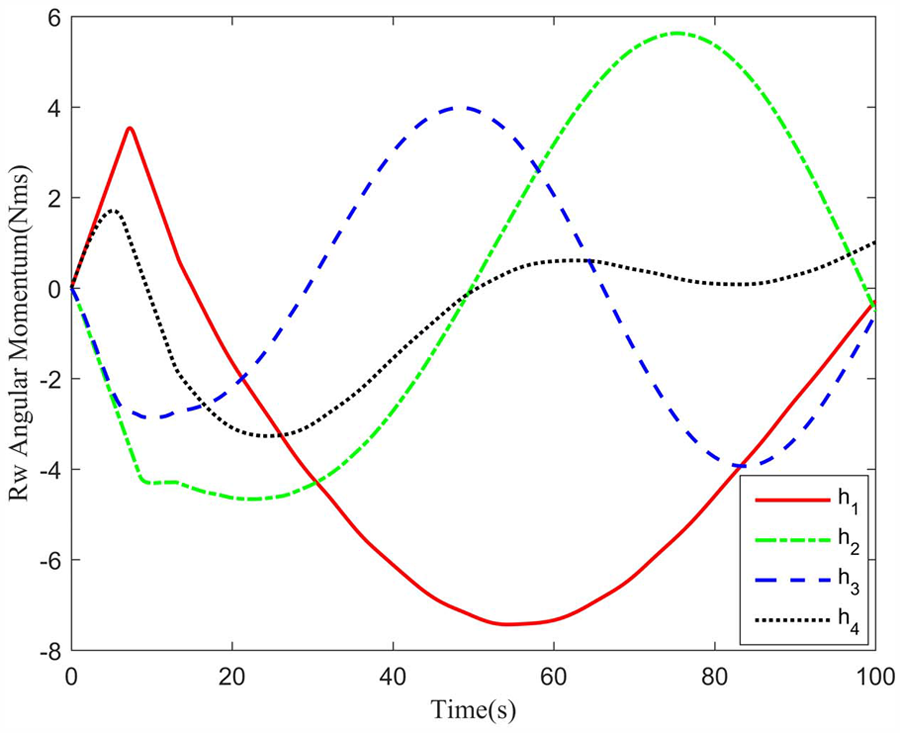
The curve of reaction wheel’s angular momentum.

The curve of estimation parameter.

The curve of vibration suppression.
Conclusion
In this article, the attitude tracking problem for flexible spacecraft with inertia uncertainty, external disturbance, actuator misalignment, and input saturation has been investigated. Two types of sliding mode control laws are developed to solve the attitude tracking control problem of flexible satellite. The first one is based on terminal sliding mode approach, and the second one employs adaptive control scheme. The effectiveness of the proposed control laws is verified through practical simulation examples.
Footnotes
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the New Century Excellent Talents Program of the Ministry of Education of China (NCET-13-0170), the National Natural Science Foundation of China (nos 61473096, 61273096, 61333003, 91438202), and the Open Fund of National Defense Key Discipline Laboratory of Micro-Spacecraft Technology (HIT.KLOF.MST.201505).