
Abstract
An improved particle swarm optimization method that has better equilibrium characteristic between global search and local search is proposed for parameter identification of hysteresis nonlinear dynamic model for piezoelectric positioning system. In this article, a general electromechanical-based piezoelectric positioning systems’ hysteresis nonlinear dynamic model suitable for engineering optimization is introduced, and a parameter identification technique based on improved particle swarm optimization for this dynamic model is presented. For increasing the speed and precision of identification process, the hysteresis effect is described by the generalized Prandtl–Ishlinskii model, and the symmetric solutions of the system are applied to solve the hysteresis nonlinear dynamics equations and then the working process of the improved particle swarm optimization method is given. In order to verify the effectiveness of the proposed method, comparisons between experimental data and simulation data are carried out. The results demonstrate that improved particle swarm optimization method can make the hysteresis nonlinear dynamic model with identified parameters fit the experimental data with higher precision, and since the application of the symmetric solutions, the identification time is greatly reduced. Therefore, the improved particle swarm optimization method is an optional effective technique for identifying the parameters of hysteresis nonlinear dynamic model for the piezoelectric positioning system.
Keywords
Introduction
With the rapid development of precision manufacturing industry, piezoelectric positioning systems are becoming more and more necessary for nanometer displacement resolution in high-precision positioning and tracking applications, such as atomic force microscopes, scanning tunneling microscopes, hard disk drive, and diamond turning machines.1–4 Among various types of actuators, piezoelectric ceramic actuator is arguably the most popularly used in precise positioning systems due to its advantages of high speed, high bandwidth, high electrical–mechanical transformation efficiency, and little heat generation. Although the piezoelectric actuator possesses many advantages, it produces a nonlinear hysteresis phenomenon owing to piezoelectric material property. 5 It was shown that the maximum tracking error caused by the hysteresis nonlinearity can be as much as 10%–15% of the traveling path if the piezoelectric actuators are steered by driving voltage in the open-loop system. 6
Piezoelectric positioning system is a complex nonlinear and strongly electromechanical coupled dynamic system. Its working process is accompanied with mechanical and electrical effects. Over the past decade, such a mechatronic system has attracted significant attention in the literature on its modeling, controller design, and applications due to the complex hysteresis nonlinearity existing in the system.7–11 Generally speaking, the modeling and controller design are closely related, and the models of the piezoelectric positioning systems should account for the dynamic effects due to frequency response of the actuator, voltage–charge hysteresis, and nonlinear electric behavior. Therefore, the piezoelectric positioning systems usually are described by a linear system preceded by a hysteresis nonlinearity in many literatures,12–14 the dynamic equations of which are actually nonlinear ordinary differential equations containing hysteresis nonlinear term. However, no matter what kind of models, there must be some errors between the models and the actual performance of the piezoelectric positioning system because assumptions and approximations are made in modeling. In order to improve the accuracy of hysteresis nonlinear dynamic model and make the models reflect the actual system performance better, it is necessary to identify the parameters of the models using optimization techniques. Nevertheless, traditional optimization methods, such as the least square method, gradient descent method, quasi-Newton method, and simplex method, which may use all local information in an effective way, easily trap into the local optimum and fail to provide reliable results in hysteresis nonlinear dynamic system.
In recent years, evolutionary algorithms such as the genetic algorithm (GA), particle swarm optimization (PSO), harmony search (HS) algorithm, and memetic algorithm (MA) have received much attention in the optimization problems of nonlinear and complex system. Among them, GA is one of the most popular methods and was proposed to improve the accuracy of the fuel-cell model parameter identification.15,16 However, the GA usually suffers from certain inefficiency in optimizing complex problems because of their well-known drawbacks, premature convergence, and weak exploitation capabilities. 17 The performance of GA can be improved by incorporating different local search (LS) and traditional GAs, which is called memetic algorithm. An efficient MA with a novel LS, namely, MA with adaptive LS (MA-ALS) is proposed to improve the accuracy and convergence speed simultaneously. 18 HS algorithm imitates the musician seeking to find pleasing harmonies as determined by an aesthetic standard. But there is imbalance between the exploration and the exploitation of HS. Recently, incorporating fuzzy logic and discrete HS algorithm, an effective fuzzy discrete harmony search (FDHS) is developed for optimizing capacitor placement and sizing in distribution systems 19 and excellent results have been obtained. As an alternative to GA, the PSO algorithm is a swarm intelligence optimization algorithm based on observations of the social behavior of bird flocking or fish schooling.20–22 Due to the simple concept, easy implementation, and quick convergence, nowadays PSO has been developed and applied in various fields, especially for wide-ranging optimization problems,23,24 and then based on fractional PSO, a novel MA FPSOMA is introduced to solve optimization problem using fractional calculus concept. 25 Moreover, a variety of evolutionary algorithms are employed to obtain optimal performance for synchronization of bilateral teleoperation systems against uncertainties including model parameters. 26 Actually, parameter identification for piezoelectric positioning system could be essentially formulated as a multi-dimensional optimization problem; however, only a few applications of piezoelectric positioning system opted for PSO. Even if the classical PSO is adopted, the speed of parameter identification is not ideal when the amount of data is very large.
In this article, an improved PSO method is proposed, which has preferable search ability and search rate based on the equilibrium characteristics between global search and LS. A general electromechanical-based hysteresis nonlinear dynamic model for piezoelectric positioning system is introduced. In the model, numerous identified parameters are utilized to describe the main characteristics of the piezoelectric positioning system. Then, an improved PSO is proposed to identify the parameters of hysteresis nonlinear dynamic model for piezoelectric positioning system. In order to raise computing speed of parameter identification, the symmetric solutions of piezoelectric positioning system are introduced to the improved PSO method. To the best of our knowledge, this is the first time the symmetric solutions are applied for parameter identification of piezoelectric positioning system. Finally, some experiments and comparisons are conducted to show the feasibility and effectiveness of the improved PSO method.
Piezoelectric positioning system dynamic modeling
Architecture of the piezoelectric positioning systems
A piezoelectric positioning system consists of a voltage power amplifier, a piezoelectric stack actuator, and a flexure hinge mechanism; the architecture of the system is shown in Figure 1. A voltage power amplifier is used to supply power for piezoelectric stack actuator by either voltage or charge control. A piezoelectric stack actuator is applied to realize the actuation effect by generating force on the flexure hinge mechanism. A flexure hinge mechanism is utilized to provide motion based on elastic deformations of a solid part made from a stiff metal because of the advantages of its no sliding parts, thereby avoiding undesired nonlinear effects such as backlash and friction. 27 For controlling purpose, a displacement sensor is usually mounted on the flexure hinge mechanism to measure the instantaneous displacement of the positioning system.
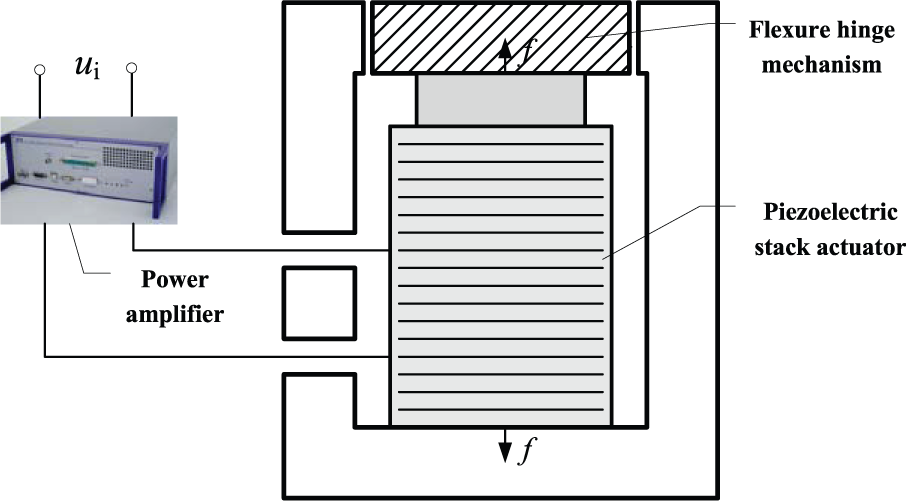
Architecture of a piezoelectric positioning system.
Hysteresis nonlinear dynamic model of piezoelectric positioning system
On the basis of the classical model
28
and previous results,5,12–14 considering the architecture of a piezoelectric positioning system in Figure 1, a general electromechanical-based hysteresis nonlinear dynamic model for piezoelectric positioning systems is shown in Figure 2. Therein, the hysteresis and piezo effect are separated. H represents the hysteresis effect and

Electromechanical-based hysteresis nonlinear dynamic model for the piezoelectric positioning system.
Consider the piezoelectric transducer in Figure 2 and take electric charges q and endpoint displacement x as generalized coordinates. The total power delivered to the transducer is the sum of the electric power

For a conservative element, this work is converted into stored energy,

Comparing equation (2) with equation (1), we recover the equations

In Figure 2, one easily finds the relations as follows


and it is obvious from equations (4) and (5) that

Substituting equations (4) and (6) into equation (1), one gets

which is the total differential of

This is the analytical expression of the stored electromechanical energy for the piezoelectric transducer in Figure 2.
Considering the piezoelectric positioning system of Figure 2, the kinetic coenergy of the system is

and the electromechanical energy for the piezoelectric transducer is given by equation (7). Combining these equations, we can write the Lagrangian 29

and the dissipation function is the mechanical contribution of the viscous damper

The virtual work of the non-conservative forces is

With the Euler–Lagrange equations of displacement and charge generalized coordinates for electromechanical systems, 30 the motion differential equations of the piezoelectric positioning system are


Furthermore, equations (12) and (13) can be represented as


where

It is shown that the hysteresis effect is encountered between the applied actuator voltage and the resulting charge.
5
In the voltage steering mode, the charge

in equation (37) can be rewritten as

which can be seen as a new hysteresis nonlinearity
So from equations (14) and (15), the hysteresis nonlinear dynamic model for piezoelectric positioning systems can be viewed as a second-order linear subsystem with a hysteresis nonlinear input voltage


Block diagram of the hysteresis nonlinear dynamic model.
Now, we consider the description of the hysteresis nonlinearity in equation (15), which is part of the general electromechanical coupling model of equations (15) and (16). In recent years, there exist many hysteresis models developed to describe the hysteresis nonlinearity, and these models can be divided into physics-based models and phenomenological hysteresis models in general. In the article, the Prandtl–Ishlinskii (P–I) model is selected as the model describing the hysteresis nonlinearity for its simplicity, ease of implementation, and accuracy.
The P–I model31–33 utilizes the play operator and the density function to describe input–output relationships of the hysteresis. Since hysteresis loops of the piezoelectric positioning system may be asymmetric, using the generalized P–I model, hysteresis nonlinearity

where

and

where
To sum up, the hysteresis nonlinear dynamic model for piezoelectric positioning system can be expressed as


where

The improved PSO algorithm
Principle of PSO algorithm
In an M-dimensional search space (solution space), the particle swarm is composed of s particles where the position of each individual particle

where
Principle of improved PSO algorithm
Although PSO has shown some important advances by providing high speed of convergence in specific problems, it does exhibit some shortages; the improved PSO algorithm has made corresponding improvements in the following respects.
First, increase the diversity of equilibrium points. The equilibrium point of PSO depends on
Second, adopt adaptive inertia weight and acceleration coefficient. Further empirical studies of PSO show that a relatively large inertia weight has more global search ability while a relatively small inertia weight results in a faster convergence. Therefore, the linear reduction inertia weight (PSO-w) was designed by Shi and Eberhart. 38 However, there are some disadvantages for the decreasing strategy of inertia weight: the largest iteration time is unpredictable in practice, and the inertia weights of all particles are so smaller in the later search stage that it is difficult to jump out from the local optimum in some complex optimal problems. Based on the idea of division of labor, the better particles get larger inertia weight, making them explore better search regions, and the worse particles get smaller inertia weight so that they can converge at the search regions rapidly to carry out meticulous search. The acceleration coefficients are adjusted adaptively according to the variation in inertia weight. The kind of processing methods for improved PSO algorithm can obtain better balance between the global and LS capabilities in every iteration, and it does not require preset maximum iteration number. Specifically, the particles are sorted according to personal best position from good to bad and then the inertia weight and the corresponding acceleration coefficients of the ith-ranked particles are expressed as follows38,39



where
Finally, introduce the symmetric solutions of piezoelectric positioning system. In parameter identification of piezoelectric positioning system with the PSO algorithm, calculating the objective function should solve the hysteresis nonlinear dynamic equations (20) and (21) frequently. Such a problem can be solved by fourth-order Runge–Kutta numerical computing method certainly, but the amount of operation in this way is too large to accomplish in a shorter period of time. In view of this situation, we introduce the symmetric solutions for piezoelectric positioning system to speed up the calculating the objective function greatly in the improved PSO algorithm.40–42 The symmetric solutions of the system can be expressed as follows


where x denotes the output displacement;


Conserved quantities

To sum up, the main advantages of the proposed algorithm are to achieve faster speed of convergence and better solution accuracy with minimum incremental computational burden.
Parameter identification of hysteresis nonlinear dynamic model
To identify the parameters of the hysteresis nonlinear dynamic model, an actual piezoelectric positioning testing system, which produced by Physik Instrumente GmbH and Company, is set up and shown in Figure 4. A z-axis piezo flexure objective scanner (PZT model P-721.CDQ) is manipulated by the piezo controller E-725 integrating the voltage power amplifier with a fixed gain of 10. The scanner P-721.CDQ is driven by applied control input voltage in the range of −20 to 120 V and has 140 µm open-loop travel. The capacitive sensor is integrated in the mechanical structure to measure the displacement of the scanner. The experimental data can be obtained by the NanoCapture software, which is a versatile tool for system response analysis and optimization. Therein, the experimental process involves no external load, that is,

Experimental piezoelectric positioning testing system.
As shown in Figure 3, the hysteresis nonlinear dynamic model for piezoelectric positioning system can be described as a second-order linear subsystem preceded by a hysteresis nonlinearity input. Due to the existence of hysteresis nonlinearity, there is no general identification method for the parameters of the model so far. In practice, two-step identification method is employed mostly, 43 that is, through selecting identification signals realizes the identification of the linear subsystem (20) and hysteresis nonlinear part (21), respectively. In the article, we also adopt the two-step identification strategy and put emphasis on parameter identification of the hysteresis nonlinear part.
Identification of the linear part
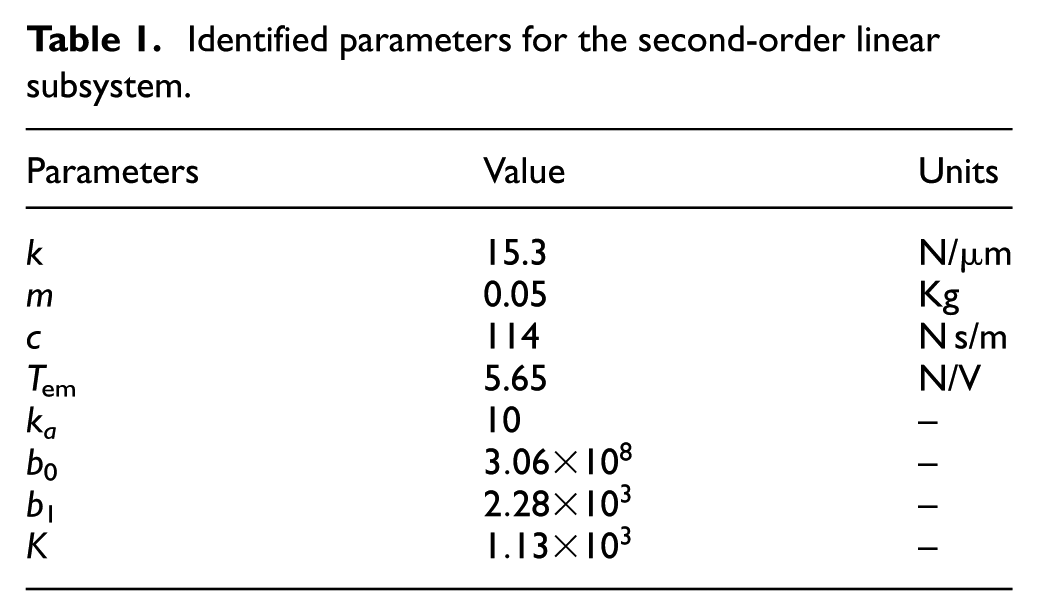
From equations (20) to (22), the parameters for linear subsystem part cannot be obtained by simply using the specifications of the piezoelectric positioning system, because the exact information on the parameters c,
Identified parameters for the second-order linear subsystem.
Parameter identification of hysteresis nonlinear part with improved PSO algorithm
As shown in equations (21) and (22), the hysteresis nonlinear part is described by the generalized P–I model; since the output

where
In this article, the problem consists of minimizing the objective function


The procedure of parameter identification with improved PSO is shown in Algorithm 1.

According to the experimental data, the procedure of the improved PSO is running with MATLAB software to obtain the identified parameters of the hysteresis nonlinear part of the hysteresis nonlinear dynamic model. To compare the performance of the improved PSO with other algorithms, the parameter identification of the hysteresis nonlinear part is also implemented using the PSO-w and GA, in which the objective function is calculated by fourth-order Runge–Kutta method. In all identification experiments, the particle size is 200, the maximum iteration number is 300, the running number is 15, and all the software are run on a PC (Core i5 CPU 2.66 GHz, 4 G RAM). Over 15 runs, the identified results of all algorithms are obtained and shown in Table 2. In the table,
Parameter identification results of each algorithm for the hysteresis nonlinear part of hysteresis nonlinear dynamic model.

PSO: particle swarm optimization; GA: genetic algorithm.
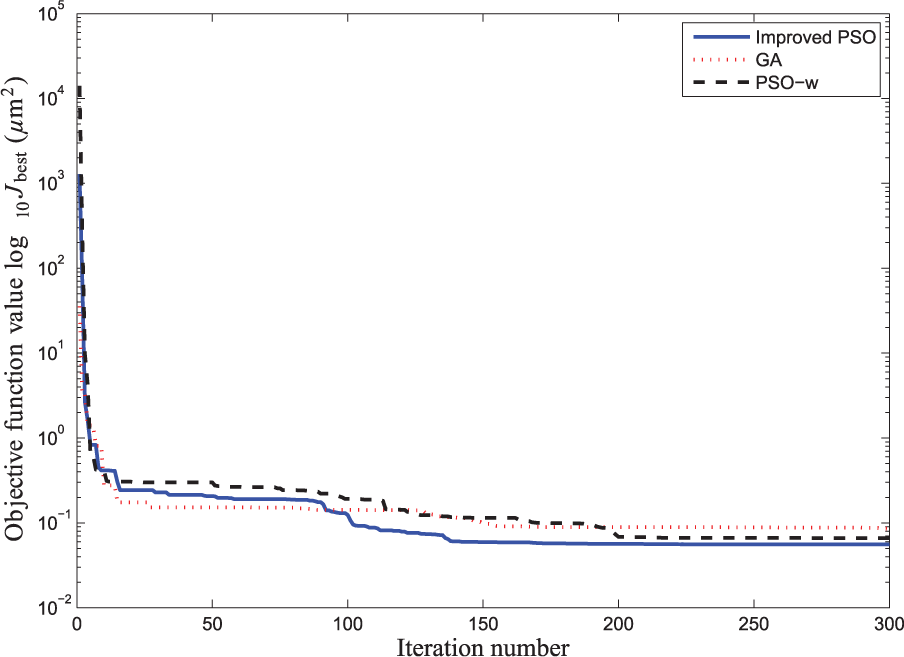
Convergence process of all the algorithms with the experimental data.
It should be pointed out that the challenge for controlling the piezoelectric positioning system lies on the way to handle the hysteresis nonlinearity after obtaining the hysteresis nonlinear dynamic model with identified parameters. An important approach is to construct inverse hysteresis model to compensate the hysteresis effect, 32 and the feed-compensation control strategies should be applied to the positioning system.33,34,36 Certainly, other control method can also be utilized 35 and it will be the focus of our future research work.
Experimental validation of the hysteresis nonlinear dynamic model
In order to prove the effectiveness of the identified results, the obtained parameter values can be fed back to the hysteresis nonlinear dynamic model to achieve the output displacement response under the specific input voltage.
Figure 6 shows the applied input voltage signal

which is used to drive the piezoelectric positioning system. With the input voltage, some positioning experiments are conducted to show the effectiveness of the proposed method. Specifically, we use equation (21) to construct the hysteresis

Input voltage.
Figure 7 shows the comparison between the experimental data and the simulation data of output displacement, and it can be seen that two kinds of result are consistent, which indicates that the simulative result of the hysteresis nonlinear dynamic model can give a good prediction of the actual output displacement of the piezoelectric positioning system. The prediction error curve between the simulation data and the experimental data of output displacement is shown in Figure 8; we can see from it that the peak error of the output displacement is no more than
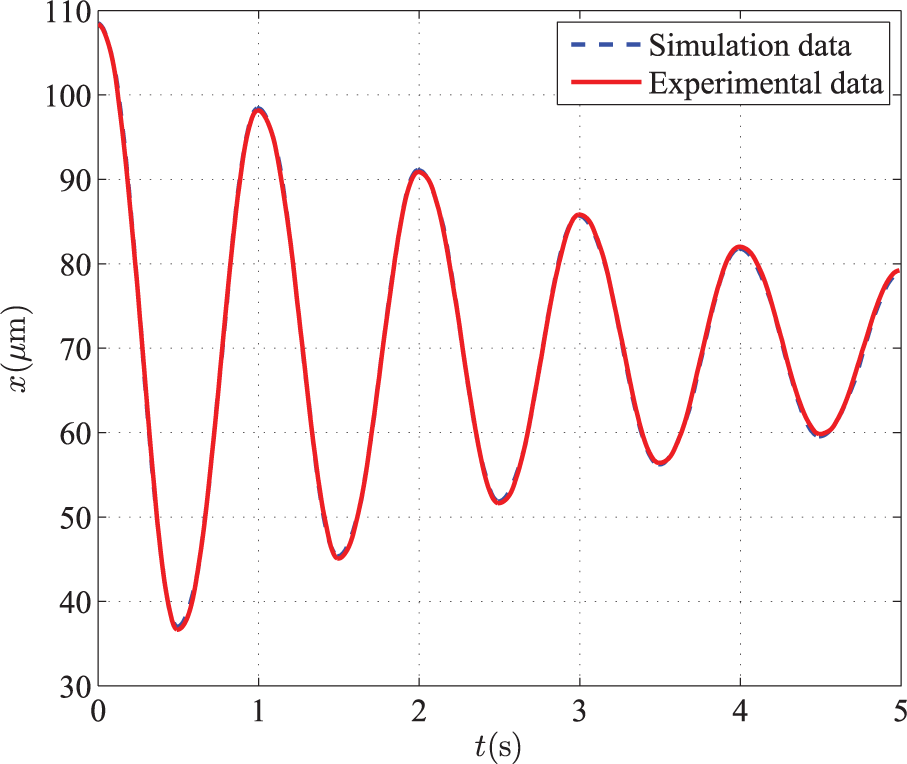
Output displacement.

Prediction error.
Notice that comparing Figures 6 and 7, the output displacement actually evinces some distortion on both the rising and fall sections. Further observation indicates that this is not typical dynamic distortion. There is no discernible phase lag between the input voltage and output displacement, as indicated by the relative position of the waveform peaks, and there are no significant filtering effects, evidenced by the fact that the peaks are neither rounded nor otherwise distorted. These observations indicate the existence of a rate-independent hysteresis. The hysteresis behavior is clearly displayed in Figure 9, which shows hysteresis curve plotted output displacement versus input voltage with simulation data and experimental data. Obviously, the difference of the results between the proposal method and experimental measurement is also difficult to discern. The fact further illustrates effectiveness of the improved PSO parameter identification method.

Hysteresis curve of output displacement versus input voltage.
Conclusion
In the article, a parameter identification method based on the improved PSO for general electromechanical-based hysteresis nonlinear dynamic model of piezoelectric positioning systems has been presented. Through increasing the diversity of equilibrium points, adopting adaptive inertia weight and acceleration coefficient, and introducing the symmetric solutions of piezoelectric positioning system, the proposal method has been implemented in MATLAB environment. It is shown from the identified results that the improved PSO has faster convergence speed and smaller running time. With identified parameters, some comparisons between the simulation data and experimental data are carried out. The results indicated the effectiveness of the improved PSO parameter identification method. So the improved PSO could play an important role for identifying the parameters of the hysteresis nonlinear dynamic model for the piezoelectric positioning systems, and it also has reference value for other dynamic systems.
Footnotes
Academic Editor: Fen Wu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundations of China (grant nos 11472247, 11272287, and 11372169), was supported, in part, by the Program for Changjiang Scholars and Innovative Research Team in University (PCSIRT; grant no. IRT13097), and was supported by Zhejiang Province Key Science and Technology Innovation Team Project (grant no. 2013TD18).