
Abstract
Reliability evaluation plays a more and more important role in nuclear engineering, aviation industry, and so on. Due to the special integrity of a control system, traditional reliability methods, such as the reliability block diagram and fault tree analysis, are not proper to make a reasonable and accurate reliability evaluation on a control system. However, a systematic methodology to predict performance reliability of a control system is rarely reported. In this article, a methodology of performance reliability based on the performance requirement for an automatic control system, not just limited to the stability reliability or probabilistic robustness evaluation, is first proposed. A solution to evaluate control performance reliability is introduced with analytical approximation approach called first-order second-moment method. Also, a robust iterative algorithm is adopted to overcome the bifurcation and chaos problems encountered when searching the most probable point for highly nonlinear limit state function. An elaborate example based on a servo motor control system is presented to calculate performance reliability of the settling time of the control system with first-order second-moment method. Its numerical approximation is demonstrated to be accurate through Monte Carlo simulation.
Keywords
Introduction
Lack of a systematic methodology for control performance reliability evaluation for automatic control systems
Demand of evaluating the reliability of the control performance of a control system grows gradually and becomes more and more urgent along with the increasing requirement of the reliability and safety in many important civil engineering fields, such as nuclear engineering and aviation industry. Such evaluation of control system reliability also guides the parameter design of a control system and helps making decisions on the selection of several alternative control strategies. Moreover, since the essence and motivation of control technology ultimately stems from the requirement of system reliability, 1 methodology of control system reliability prediction should be set up and developed to assess its control performance quality for control system with uncertainties of either model parameter or external excitation. Although the robust control technique is well developed to handle the instability problem of control systems with great uncertainties, such a technique is undoubtedly a resource-consuming and tough task since it considers all of the probable uncertainties of a control system. Actually, situations with extremely low probability can usually and wisely to be ignored while high reliability can still be guaranteed. Hence, evaluation of control system reliability should be performed to indicate the extent at which the maximum range of uncertainties can be neglected while a required reliability can still be reached.
However, the traditional reliability analysis which holds the idea that separate two-state failure analyses of components distribute to the deduction of system reliability through proper reliability modeling, such as fault tree analysis, reliability block diagram, Markov chain modeling 2 is no longer appropriate and efficient to describe and analyze the control system reliability. It is because that the performance of the whole control system is not simply or merely depending on the functioning conditions of separated components, but on the overall synergistic effect of components in a control system. Failures or function deterioration of one component may not necessarily lead to the failures of a whole control system, since the parameter adjustment, robust control strategy, or controller reconfiguration can maintain a control system functioning normally. Therefore, it is hard and impractical to get clear definitions of failure criterion for every component in a control system, which hinders the application of traditional reliability modeling to evaluate the reliability of control system. Therefore, there is a demand of establishing a new methodology to evaluate the control system reliability which can describe the control performance reliability as a whole.
A well-suited method to model control system reliability is the stress–strength interference theory which is the core theory of structural reliability analysis that is widely applied to solve the reliability prediction of mechanical structures. Probabilistic stability measures for controlled structures was first introduced and proposed to solve the reliability prediction for a structural control system with probabilistic model uncertainties with a similar analysis method used in structural reliability.3,4 These approaches apply Routh–Hurwitz stability method to judge whether a linear control system is stable and hence utilize this method to establish failure criteria for the whole control system stability, which, in other words, is named as limit state functions in structural reliability. Then, the reliability evaluation of control stability can then be transformed as structural reliability prediction that gets fully developed through several decades. 5 As the research of the stochastic robustness evaluation of control system with probabilistic model uncertainties is progressively ongoing, researchers started to focus on reliability prediction of the control stability for those systems under stochastic excitation 6 or under both model and excitation uncertainties. Methodology of stability reliability calculation for a controlled structure has gotten a remarkable progress, but these researches are limited to the reliability analysis of stability of controlled structures. It is rarely reported on the evaluation approach either for general auto-control systems or for other important performances such as the settling time, percent overshoot, steady-state error, system bandwidth, gain margin, and phase margin. Moreover, it is necessary to set up a systematic methodology for performance reliability evaluation to guide the quality control and management for a control system design and manufacture since the performance requirements vary in different control systems. Therefore, this article will present a systematic methodology for reliability evaluations of various control performances for general automatic control systems.
Obstacles of control system reliability calculation
Since methods of evaluating control system reliability can be solved in a way which is similar to the one of structural reliability, the main obstacle to calculate control performance reliability lies at the estimation of the probability of failure by a multi-dimensional integral on the failure domain defined by the limit state functions. There are three main approaches to remove this tough obstacle: numerical calculation, simulation with Monte Carlo simulation (MCSim), 7 and approximation solutions, in which first-order reliability method (FORM) is the most important and popular one.8,9 However, direct numerical calculation of multi-dimensional integral in a complex integral domain takes more calculation time and makes larger accumulative error as the dimension of integral increases, 10 and simulation methods, even those with important sampling schemes, are time-consuming and impractical to problems with low probability of failure and implicit limit state functions. 11 Hence, FORM gains its popularity and widespread application in practice for its computation efficiency and accuracy despite of its drawbacks that approximation error grows as the nonlinearity of limit state functions become higher, and this method gives no indications on whether the estimation is conservative or aggressive without knowing the concavity and convexity of limit state function. 12 A correction factor taking into account the curvatures of the limit state functions can be multiplied to the approximated reliability value in order to decrease the error brought by the its serious nonlinearity. 13 Moreover, in order to overcome the hurdles in FORM approximation for highly nonlinear limit state function, an innovative approach based on universal generating function avoids the approximation with linear hyperplane and applies maximum entropy principle to obtain the optimally fitted probability density function (PDF) of limit state function. 14 Such a method can obtain reliability approximation at any precision but is seriously limited to applications with no more than one limit state function.
For the reliability prediction of control systems with more than one requirement, the reliability calculation would encounter another obstacle: multi-dimensional integration with complex failure domain defined by multiple limit state functions. Similarly, such integration can be solved by FORM but requires more effort to deal with the complex integral domain. Among solutions to this question, first-order multinormal (FOMN) approximations reduce the order of integral dimension and hence obtain the approximation by a product of several single integrations through a recursive scheme using condition probability formula and linearization. 15 Another method called product of conditional marginal (PCM) is also based on a simple computational procedure involving a product of one-dimensional normal integrals and demonstrated to be more accurate and sufficient than FOMN since PCM does not involve heavy computation of linearization. 16 For those situations when the computation efficiency is more important than the calculation accuracy, probability network evaluation technique (PNET) may be the best alternative since it reduces the multi-dimensional normal distribution to a nonsingular distribution of independent variables which is easy to estimate its reliability.17,18
In this article, some potential obstacles of reliability evaluation for control systems are first presented and alternative solutions to solve these obstacles are proposed in this section. Then, based on these summaries of obstacles and solutions, a systematic methodology of performance reliability of automatic control systems is thoroughly introduced in section “Obstacles of control system reliability calculation.” This methodology can describe and analyze the reliability of control as a whole in a similar way as in analyzing the structural reliability. Detailed algorithms of FORM and its iterative algorithm to calculate control system reliability are presented in section “Principle of FORM and its iterative algorithm.” A case study is elaborated to apply the proposed method to evaluate the reliability of settling time of a servo motor control system in section “A case study of a servo motor control system.” The estimation of reliability would be compared with the numerical results from MCSim to show the validity of proposed methodology of control system reliability. Finally, the last section concludes the article.
Methodology of performance reliability evaluation of a control system
Things are born with uncertainties, and a control system is no exception. Generally, there are two main types of uncertainties for a control system: model inconsistency between the mathematically described model and the practical system and uncertainty of external excitations. In this article, the former will be discussed. Model uncertainty mainly comes from incomplete knowledge on the physical system, deviations from calculation approximation, and stochastic manufacturing errors. All of these may result in the uncertainty of a control system behavior. It is theoretically demonstrated that uncontrolled model uncertainties of a control system may lead to system instability, steady-state error, and several important response performances. 19 In order to evaluate the probability that a given control system to work normally with specific uncertainties, it is necessary to define an index of reliability for such a system capacity.
Definition
As a control system, its performance reliability is a general designation of its probability to satisfy certain specific performance

where

Because that performance requirements vary in different control systems, there are various kinds of performance reliability, such as stability reliability, settling time reliability, steady-state error reliability, and gains/phase margin reliability.
Since complex systems with high-order transfer function could be approximated by a second-order system using some order-reducing methods, here, a detailed methodology of control performance reliability would be given based on linear second-order control system.
In the control system theory, compared with state–space representation, it is much easier to explore the relationship between system performance and model parameters using transfer functions representation. Therefore, the performance reliability of a linear control system adopts transfer function method to describe control systems. The typical transfer function of a second-order control system can be written in the following form

where
Definition 1.1
Stability reliability of a control system is defined as its probability to keep stable. Stability reliability is the most fundamental and important reliability index for a control system. To a second-order control system described with the transfer function in equation (3), its stability depends on the value of damping ratio

Usually, the PDF

The calculation of the multiple integration above is also very complicated, but its approximation can be easily obtained through the FORM which will be introduced later in this article.
Definition 1.2
Settling time reliability of a control system is defined as the probability to settle within a certain percentage of input amplitude in a required time. For a second-order control system, its settling time for which the response remains within 2% of the final value can be calculated through

In some situations, when the efficiency is put in the first place or the control system works with other systems, the settling time is often required to be set within a certain value

Also,

Similarly, reliability of other performance can be defined in the same way, and its calculations can be ultimately transformed as a multiple integration in equation (2). It can be concluded that the integral objects are almost the same and the difference lies in the variety of a limit state function
Furthermore, to control the systems which have to meet more than one requirement, the limit state function can be expressed as a combination of all requirements

Approximation of equation (9) is far more difficult than the one in equation (2) and method to solve it will be discussed in the following section.
Principle of FORM and its iterative algorithm
Principle of FORM
In order to solve the integration in equation (2), an efficient method to make an accurate approximation of this integral is FORM which is widely used in structural reliability analysis. Such a method utilizes first two moments of the multi-dimensional PDF

where

And the correspondent transformed limit state function is
Since direct integration of equation (2) in the failure domain with a nonlinear boundary
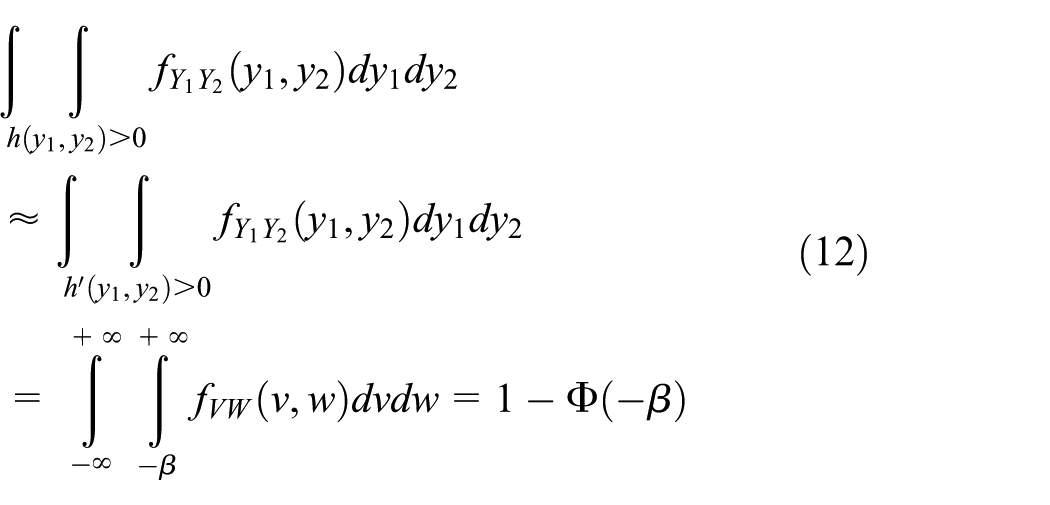
where
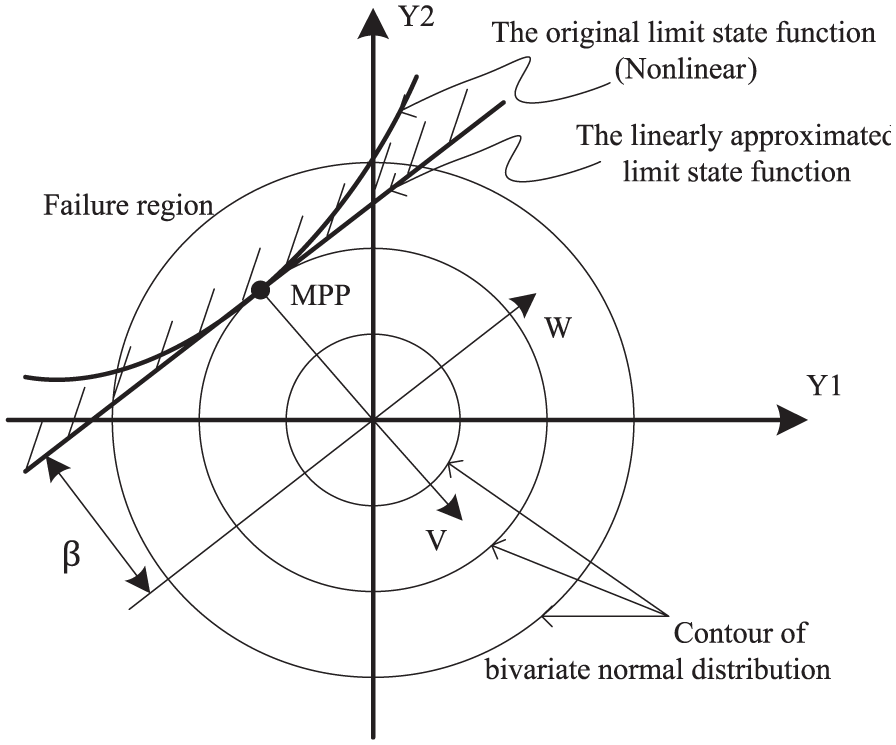
An illustration of FORM in bi-variable normal space.
This conclusion can be applied to multiple integration in equation (2) with no rectifications

where
However, the approximation for the integration with multiple limit state functions just as equation (9) is a little bit complicated
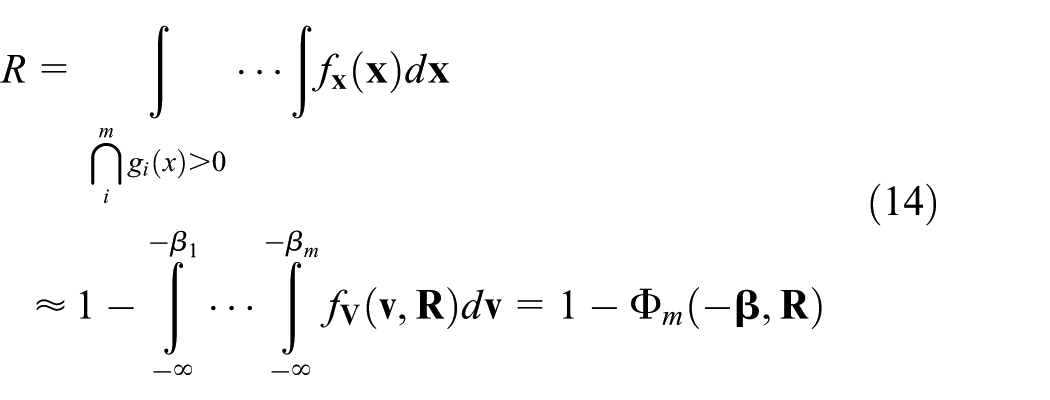
where
Methods to approximate the multi-dimensional integration in equation (14) include FOMN approximations, PCM, PNET, and so on.
Iterative algorithm to search MPP
Searching the MPP, the optimal point on the limit state surface that is closest to the origin, is the key barrier in evaluating reliability with FORM. Among many mathematical optimization schemes, such as the gradient projection method, the augmented Lagrangian method and the sequential quadratic programming method, Hasofer–Lind and Rackwitz–Fiessler (HL-RF) iterative algorithm is highly recommended and widely used. However, when limit state surface is complicated and highly nonlinear in standard normal space, HL-RF iterative algorithm would encounter the bifurcation and chaos problem and fail to converge. 22 Several modified iterative algorithms are engaged in solving this problem by altering the infinite search step length into a finite one using various step length selection rules.23,24 A robust iterative algorithm is proposed to introduce a new step length to control the convergence of the sequence and demonstrates its efficiency and simplicity to find MPP in FORM. 25 This iterative algorithm will be introduced as follows.
Suppose

Bring in a point


The iterative procedure for searching MPP.
Then, its slope is as follows

It is not difficult to judge that the line connecting

Then

and correspondent distance

If it cannot be satisfied, the step length

where
So far, the iterative algorithm is completely presented. Its efficiency and validity can be figured out in the following case study.
A case study of a servo motor control system
Control model of a servo motor control system and its simplification
The widely used servo motor control system with three-loop control is chosen as the case study in this article. The task of the servo control system is to achieve a precise angle outputs according to input signals.
A basic control model of direct current (DC) motor with no control modules can be illustrated by the transfer function block diagram shown in Figure 3. There are mainly four parts in this block diagram: voltage equations in armature, electromagnetic force effect on rotor, dynamic equation on motor spindle, and induced electromotive force effect on the field coil. Three variables in this model, armature current
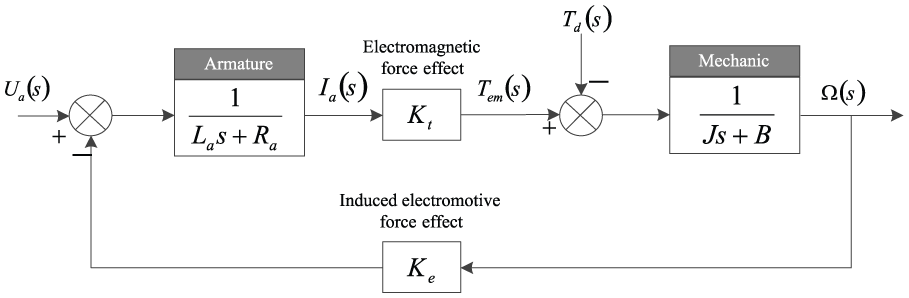
Transfer function block diagram of DC motor.
The first-loop armature current control is achieved with two-parameter proportional–integral (PI) controller (see Figure 4). It is noted that the mechanic damping ratio is neglected in control model since it is rather small. Through proper parameter selections,
where

DC motor control system with armature current control.
To show the benefit of this current control, electromagnetic torque is deduced as follows

It can be found that the armature current is proportional to the voltage input and will not jump up sharply in spite of the influence of the back electromotive force caused by the overload. Therefore, the armature current control is actually an over-current protection for the armature.
The second-loop motor speed control is designed with a proportional controller on the foundation of the armature current control (see Figure 5). The transfer function can be easily obtained

wherein

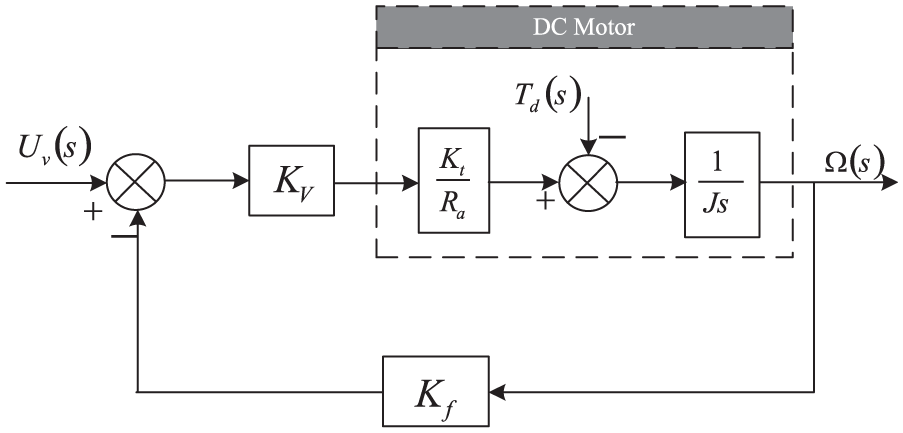
Motor speed control design based on current control.
Finally, the third-loop motor angle control is accomplished with a simple proportional controller (see Figure 6). And the correspondent transfer function is as follows


Motor angle control design based on two-loop control of current and speed.
Therefore, it can be concluded that the servo motor control system with three-loop control is essentially a second-order control system. This system can achieve zero steady-state error for step input. Its natural frequency and damping ratio is, respectively, as follows

Reliability calculation
In some applications, the settling time is required to be less than a specific value in order to coordinate well with other machines. For the control system discussed above, the settling time can be calculated through equations (6), (25), and (27)

Assuming that the controllers are realized through analog circuit, therefore, all of the control parameters contain a certain range of uncertainty due to manufacturing error. To achieve the settling time less than

where
Mean values and deviations of control parameters.

EMF: electromotive force; EMT: electromotive torque.
Given the limit state function, the reliability evaluation can be obtained through the FORM proposed in section “Principle of FORM and its iterative algorithm.” Results are shown in the next section.
Results and discussion
Validity of iterative algorithm to search MPP
Because wrong solutions to MPP are frequently obtained using a traditional HL-RF iterative algorithm, it is necessary to validate that this shortcoming does not exist in the improved iterative algorithm. Therefore, in this section, the calculated MPP and the limit state equation are projected on several two-dimensional planes to illustrate that this MPP is the closest point to the origin. Through these illustrations, the efficiency and accuracy of the proposed iterative algorithm is roughly demonstrated.
For the problem of settling time reliability evaluation in section “A case study of a servo motor control system,” the reliability index
To demonstrate the validity of the MPP, limit state functional curves with four of six standard normal variables which have the values of MPP are depicted on space of

Limit state functional curves projected into (a), (b), (c) two-dimensional plane and (d) three-dimensional space.
Moreover, except for the planar limit state functional curve in
Accuracy of approximation with FORM
In order to verify the accuracy of approximation with FORM, some design parameters are altered to obtained different approximated results, and this series of results are compared with those calculated through MCSim. In this case study, the deviation rotary inertia of motor spindle

Reliability evaluation through FORM and MCSim and the approximated error.
Reliability sensitivity analysis of the parameter deviations
Reliability sensitivity is a useful index to indicate the influence of the parameters to the whole system reliability. It is defined as the following expression

where
Reliability sensitivity of parameter deviations.

Conclusion
In this article, the methodology to evaluate the control performance reliability is first proposed, especially for the second-order control system. In order to make an accurate approximation of the multi-dimensional integration which is the main obstacle lying in control performance reliability, FORM is introduced and a robust iterative algorithm is adopted to search the MPP which is a tough task in the procedure of FORM. This method and its algorithm are demonstrated to be accurate and efficient through a case study of settling time reliability evaluation of a servo motor control system. In the case study, a servo control system is designed with three-loop control, and the deduction and simplification of its transfer function are elaborated in this article. Then, a method to evaluate the performance of the control system is applied to this case and an accurate reliability estimation is obtained with an estimated error of 3.87%. Moreover, based on this method, reliability sensitivity is carried out to show the key components in the control system which provides useful guides on the quality control of the system parameters.
Further research aims at the following two aspects. One of them is that a more accurate approximation method can be developed either through second-order approximation to the limit state function or by multiplying a correction factor to error compensation of nonlinearity of limit state function. The other one is that an optimal reliability design method can be achieved using the reliability sensitivity based on the methodology of control performance reliability evaluation proposed in this article.
Footnotes
Academic Editor: Elsa de Sa Caetano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors received the support of the Fundamental Research Funds for the National Natural Science Foundation of China (Grant no. U1361127), the National Key Research and Development Program of China (Grant no. 2016YFC0600907).