Most robots that are actuated by antagonistic pneumatic artificial muscles are controlled by various control algorithms that cannot adequately imitate the actual muscle distribution of human limbs. Other robots in which the distribution of pneumatic artificial muscle is similar to that of human limbs can only analyze the position of the robot using perceptual data instead of rational knowledge. In order to better imitate the movement of a human limb, the article proposes a humanoid lower limb in the form of a parallel mechanism where muscle is unevenly distributed. Next, the kinematic and dynamic movements of bionic hip joint are analyzed, where the joint movement is controlled by an observer-based fuzzy adaptive control algorithm as a whole rather than each individual pneumatic artificial muscle and parameters that are optimized by a neural network. Finally, experimental results are provided to confirm the effectiveness of the proposed method. We also document the role of muscle in trajectory tracking for the piriformis and musculi obturator internus in isobaric processes.
Pneumatic artificial muscle (PAM) comprises an internal rubber hose, external fiber, and a metallic sheath fixed at both ends. A PAM allows for radial expansion while inflating and output longitudinal force. When it is deflating, a joint driven by antagonistic PAM can move freely with passive characteristics, especially when both PAM are inflated. Joints can rotate with the changes in air pressure. A PAM is a high power-to-weight ratio actuator with excellent compliance, similar to human muscle and has been widely used in robots. Almost all past research studies have been restricted to a one-dimensional robot actuated by antagonistically PAM. For example, Sayama et al.1 and Narioka et al.2 designed robot legs actuated by monoarticular and biarticular PAM, respectively. Hosoda et al.3 proposed biarticular and monoarticular muscles that play different roles in jumping. Choi et al.4 expanded on this research and presented a two-dimensional leg. Other researchers who studied on control algorithms have used a sliding mode control based on a nonlinear disturbance observer,5 an adaptive impedance controller based on an evolutionary dynamic fuzzy neural network,6 and fractional fuzzy adaptive sliding mode control.7 Others have used adaptive self-organizing fuzzy sliding mode control,8 gain scheduling neural multiple-input multiple-output (MIMO) dynamic neural proportional-integral-derivative (DNN PID) control,9 hybrid feed-forward inverse nonlinear autoregressive with exogenous input (NARX) fuzzy model-PID control,10 proxy-based sliding mode control,11 and twisting and super twisting sliding control.12
Of course, other researchers have designed robots with PAM and the distribution of PAM is similar to that of human muscle, they only analyzed robot with perceptual instead of rational knowledge, not to mention accurate trajectory control.13–16 Parallel mechanisms actuated by PAM have been designed of which individual PAM has been controlled using fuzzy control,17 adaptive robust control,18 or sliding mode control with adaptive fuzzy cerebellar model articulation controller (CMAC).19 However, no attention has been paid to controlling the mechanism as a whole.
In this article, after analyzing the biological muscle structure of the human lower limb, we propose a humanoid lower limb actuated by PAM in the form of a parallel mechanism where the muscle is unevenly distributed instead of employing antagonistic muscles. Then, the system is simplified and a fuzzy adaptive control algorithm is adopted to control a hip joint as a whole rather than to control every PAM individually, and neural network is applied for optimizing fuzzy basis function parameters.
In this article, section “System analysis” addresses the humanoid lower limb kinematic and dynamic analysis, section “Observer-based fuzzy adaptive control” introduces observer-based fuzzy adaptive control, section “Parameter optimization and stability analysis” uses neural network to optimize the fuzzy parameters, and section “Experimental results” describes how the experiment was conducted and analyzes the properties of a muscle and hip joint.
System analysis
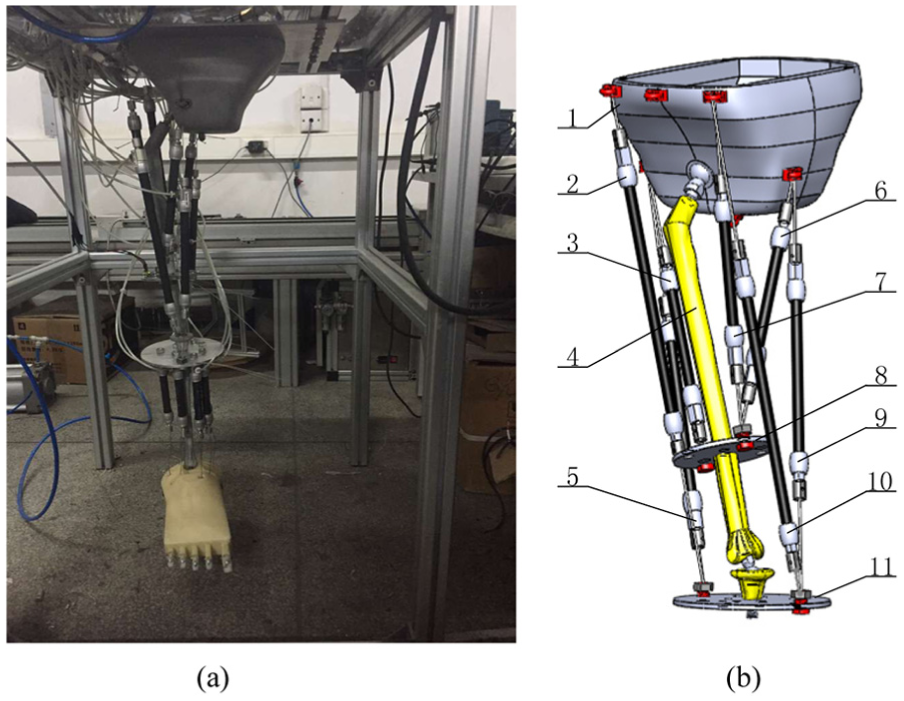
Based on the analysis of the human musculoskeletal system, we designed a humanoid lower limb with PAM (Figure 1)20. First, the pelvis was fixed to the frame, and the femoris was connected to the pelvis and hip joint platform by a thread. Moreover, the iliopsoas, musculi obturator internus, and musculi piriformis are distributed between the pelvis and hip joint platform. It can be simplified as parallel manipulator (Figure 2(a)).
Humanoid lower limb: (a) photo of the prototype of the humanoid lower limb and (b) diagram of the thigh with various muscles (1, pelvis; 2, hamstrings; 3, musculi piriformis; 4, femur; 5, biceps flexor cruris; 6, musculi obturator internus; 7, iliacus; 8, hip platform; 9, gracilis; 10, rectus femoris; 11, knee platform).
Schematic diagram of hip joint: (a) the principle structure of the hip joint, (b) point coordinates in the pelvis, and (c) point coordinates in the hip platform.
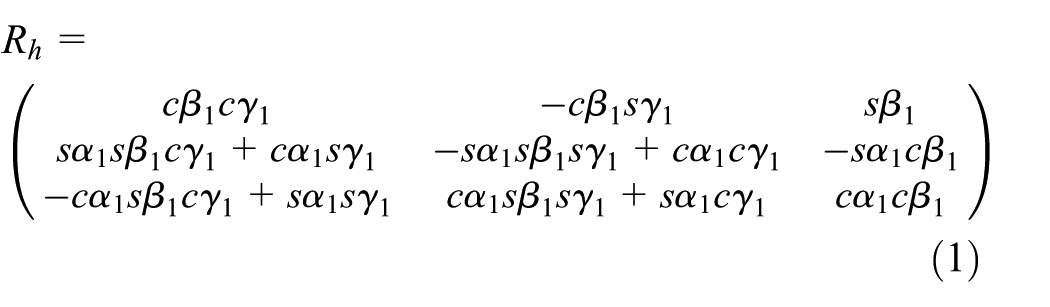
In the hip joint, comparing to transformed matrix of is
where and ; , , and are flexion-extension, adduction-abduction, and medial-lateral rotation angles in the hip joint.
The fixed point of muscles coordinated in the pelvic area are , , and , and their coordination in yields (Figure 2(b))
where ξ and η are the azimuth angle of points; , , are the points of , , circle radius in the cylindrical-coordinate system; and , while is value in the vertical direction.
Coordinates of point and can be expressed as (Figure 2(c))
where is circle radius of and and ϕ is azimuth angle.
The coordinates of in are
where and are the coordinates of point in the y and z directions.
and in can be written as
Muscle length in hip joint can be expressed as
where is length of muscle in hip joint; , , and are length of piriformis, musculi obturator internus, and iliopsoas; and , , , , , and are point coordinates that fix a PAM in pelvis and hip joint platform.
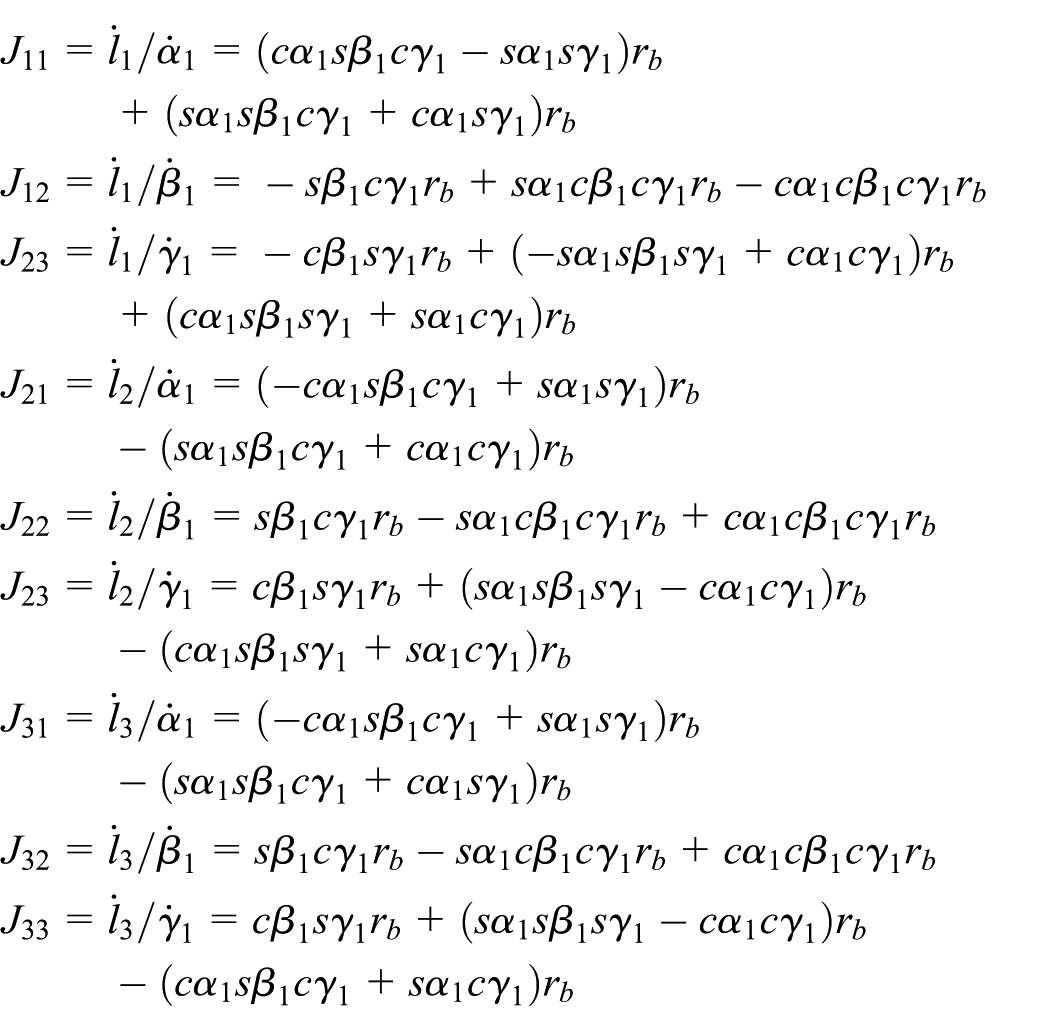
In the hip joint, the input and output are muscle length changes and angle changes; by taking the derivation of time, following relationship can be obtained
where are the velocities of the piriformis, musculi obturator internus, and iliopsoas, and is pitch, yaw, and roll angular velocities. is used to depict the relationship between input and output and is a matrix, so we call it structure matrix.
where , , , , , , , , and are the subitems of the structure matrix; , , and are the contraction velocities of piriformis, musculi obturator internus, and iliopsoas; , , and are the angular velocities of pitch, yaw, and roll of the hip joint.
Based on the principle of virtual work,21 the external and inertia forces of the femur and PAM received are zero, so the dynamics equations for hip joint are
where and are the muscle contraction velocities and force in the general coordinates; and are contraction velocities and force of iliopsoas, musculi obturator internus, and musculi piriformis in the generalized independent coordinates; and are the external and inertia forces that act on muscle.
where is torque in the hip joint, is transfer matrix that PAM displacement are transferred to generalized coordinates, is lower limb inertia, and is external disturbance.
It can also be represented with the general dynamics model of the robot
where is angular accelerations, and the inertial matrix and Coriolis force are , , respectively.
Lower limb dynamic equation can be transferred into nonlinear MIMO system as
where and are the angle and angular velocities, and are nonlinear functions, while , , and are Inertia, Centrifugal and Coriolis forces, and Gravity of robots dynamic model, respectively. Moreover, is control law while is deemed as external interference.
The energy equilibrium equation in PAM can be given by
where W is muscle contractibility power in inflation and deflation, U is energy change inside PAM, while , , , , , and are the heat, air mass, and temperature during charge and discharge.
Pressure change inside PAM becomes
where and are pressure and volume change rate, and are coefficient, and in an adiabatic process and isothermal process, they are 1.4 and 1, respectively.
It can also be expressed as
Valve port effective area for one pulse-width modulation (PWM) cycle is
where is an effective area of nozzle, is the maximum effective area of valve port, and d is duty ratio.
Air pressure change inside PAM in non-pressure control mode as
or
where and are the minimum and maximum duty ratio of high speed on-off valve.
PAM output force model can be fitted with least-square and be calculated experimentally
where is initial radius of PAM; and are air pressure and contraction length of PAM, while , , and are the undetermined coefficients and , , and is initial angle between central axis of PAM and its wire netting.
Observer-based fuzzy adaptive control
If and are known and , the control law of the hip joint can be written in the following form
Choosing the right , the polynomial has all its roots in the left half plane, and the control law can be defined as
Then, following error equation can be derived ; obviously this cannot be realized.
Based on the fuzzy control with universal approximation property, let the nonlinear function and be approximated by fuzzy systems and .
and are the state variables which are not measured directly; we can take angle and angular velocities as a whole , so that equation (11) can be further expressed as
where , , and .
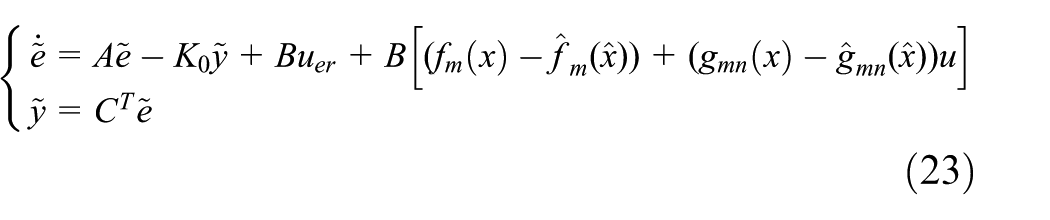
and are introduced to estimate x and y, fuzzy adaptive observer as follows
where , , and , , are subentries of and ; , , and , , , , , , , , are corresponding adjustable parameters of and . and are compact adjustable parameters of and , and are fuzzy basis functions of and , while
Parameter optimization and stability analysis
The essential of Gauss basis neural network function uses error back-propagation, and the weights of each layer are adjusted to obtain the minimal value of mean square error between the actual and reference outputs (Figure 3). The input and output are air pressure in the PAM and hip joint angles.
Using Barbalat’s lemma, we can conclude that the tracking errors converge asymptotically to zero.
Experimental results
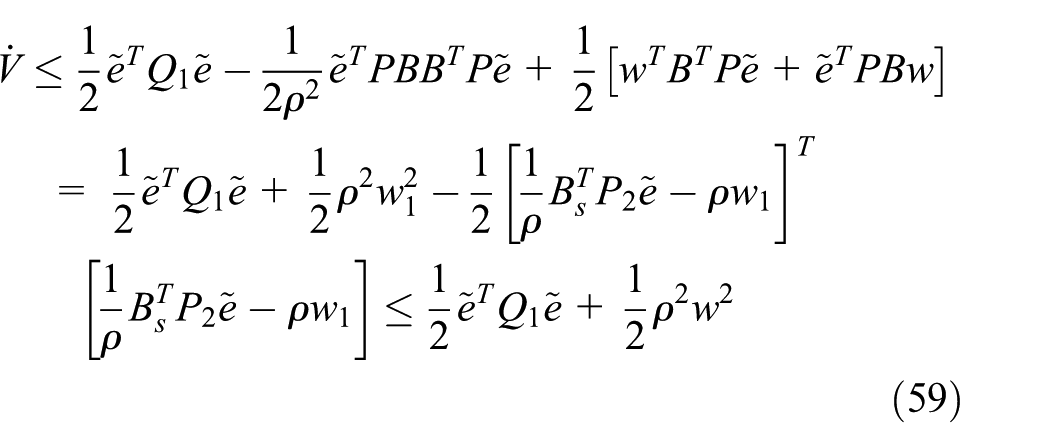
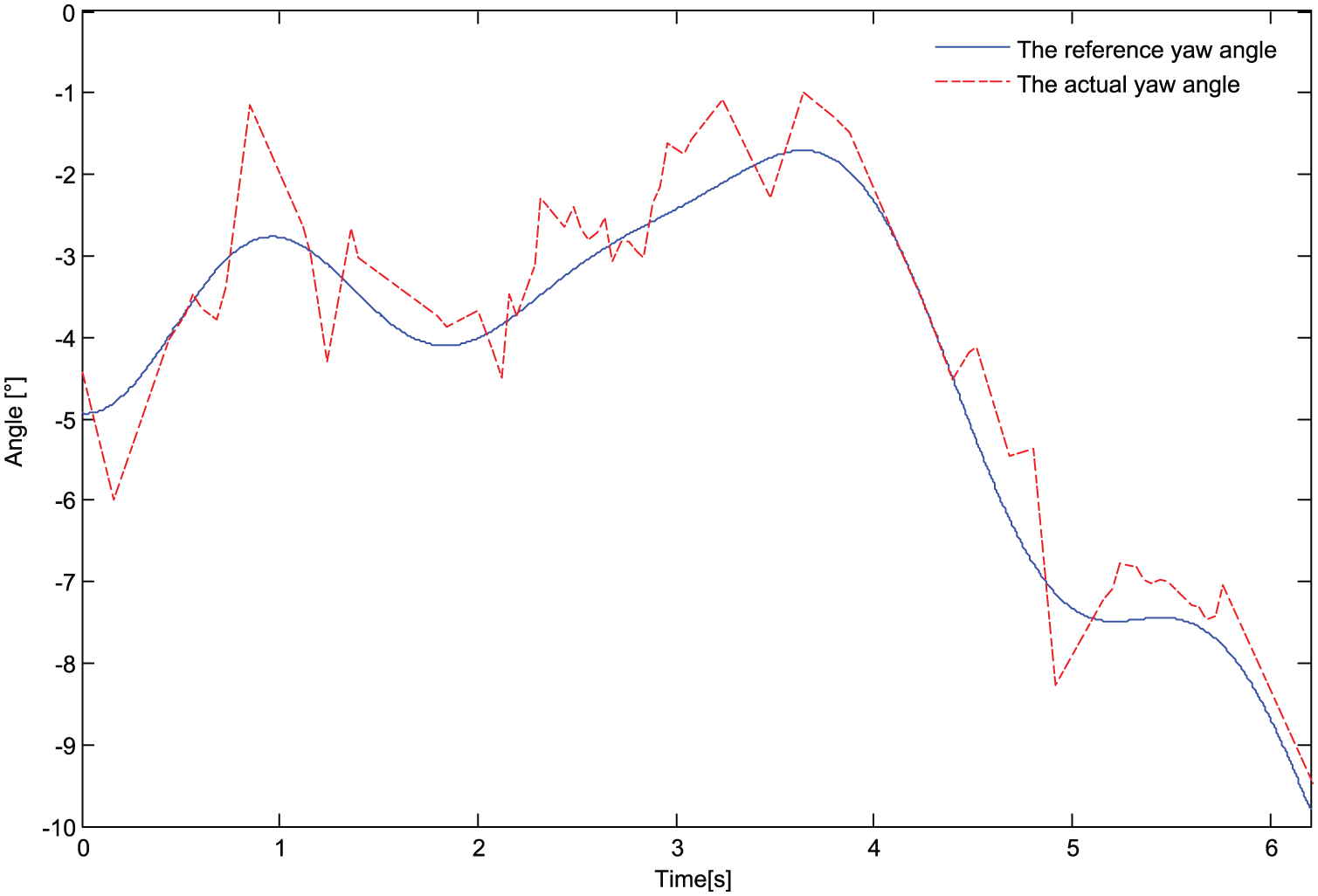
Figures 4–9 show the trajectories tracking and tracking errors of pitch (1.18°), yaw (4.54°), and roll angles (2.03°). The tracking errors are relatively large in the early stages because of a dead zone in the joint and PAM. Another larger tracking error occurs around 5 s simultaneously; the tracking errors of pitch, yaw, and roll angles were 2.3°, 1.2°, and 2.21° and are caused by resonance. Other reasons for tracking errors may include the nonlinear properties of PAM, a dead zone of the high speed on-off valve, and hysteresis influenced by the trachea. Overall, the tracking errors fluctuate around zero which further proved the stability of the control algorithm in this experiment.
The tracking curve of pitch angle over time.
The tracking error of pitch angle over time.
The tracking curve of yaw angle over time.
The tracking error of yaw angle over time.
The tracking curve of roll angle over time.
The tracking error of roll angle over time.
Pressure change (Figure 10) remained constant in the piriformis and musculi obturator internus. They are in an isobaric process which plays a role of consolidation. Meanwhile, pressure of iliopsoas changes all the time; in the first half the main trend is inflation, while in the latter half it is just the opposite. It is generally believed that the iliopsoas is mainly responsible for the movement of the hip joint.
Air pressure change over time.
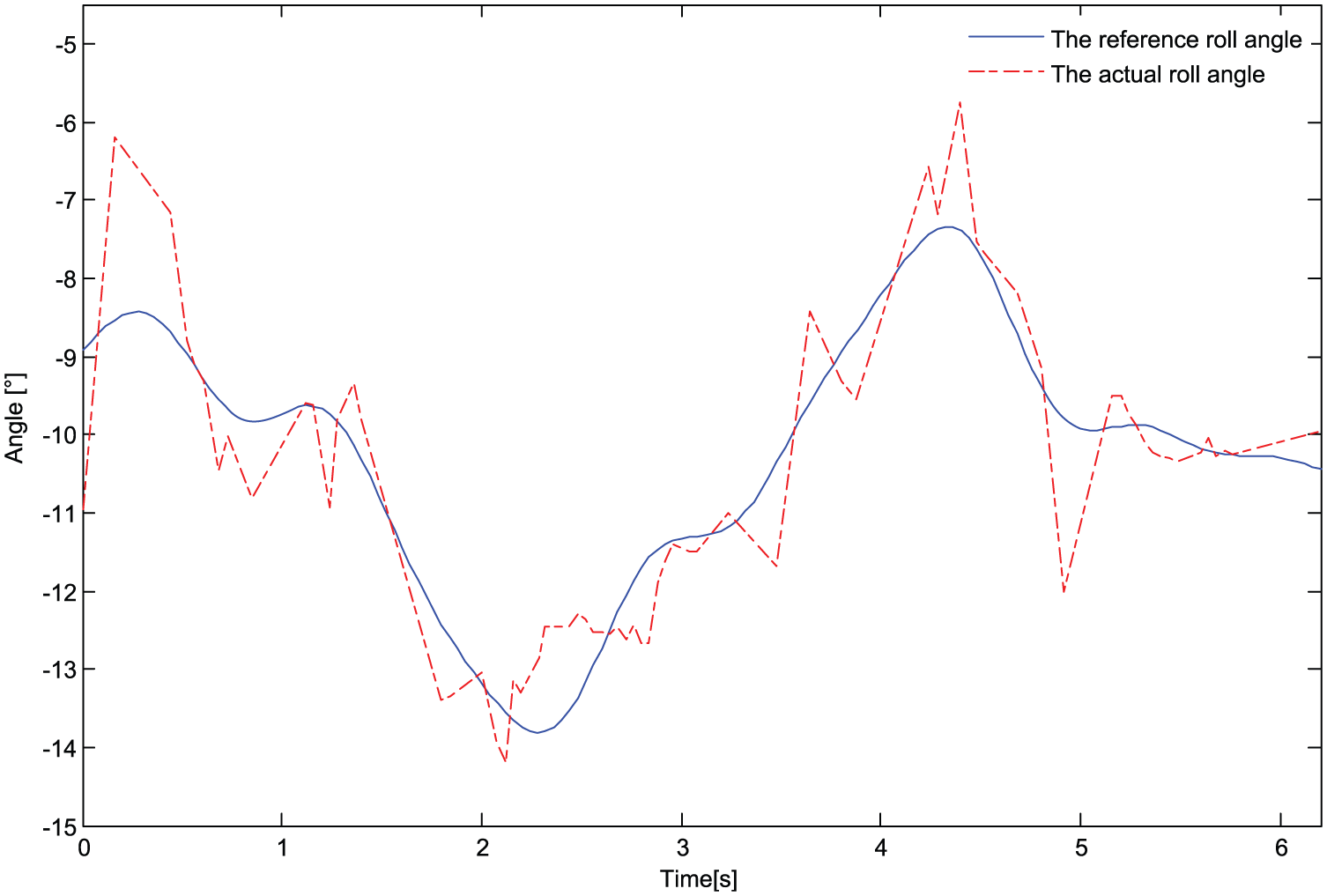
Figure 11 shows a change in the control signal input, because the non-pressure control mode has many advantages, and the valve works in this mode. We test the control parameters of the valve and learned that when the control signal input change is smaller than 20%, they work in the full closed positions, and when the control signal input change is greater than 72.9%, they work in the full open positions, respectively.
Control input of valve over time.
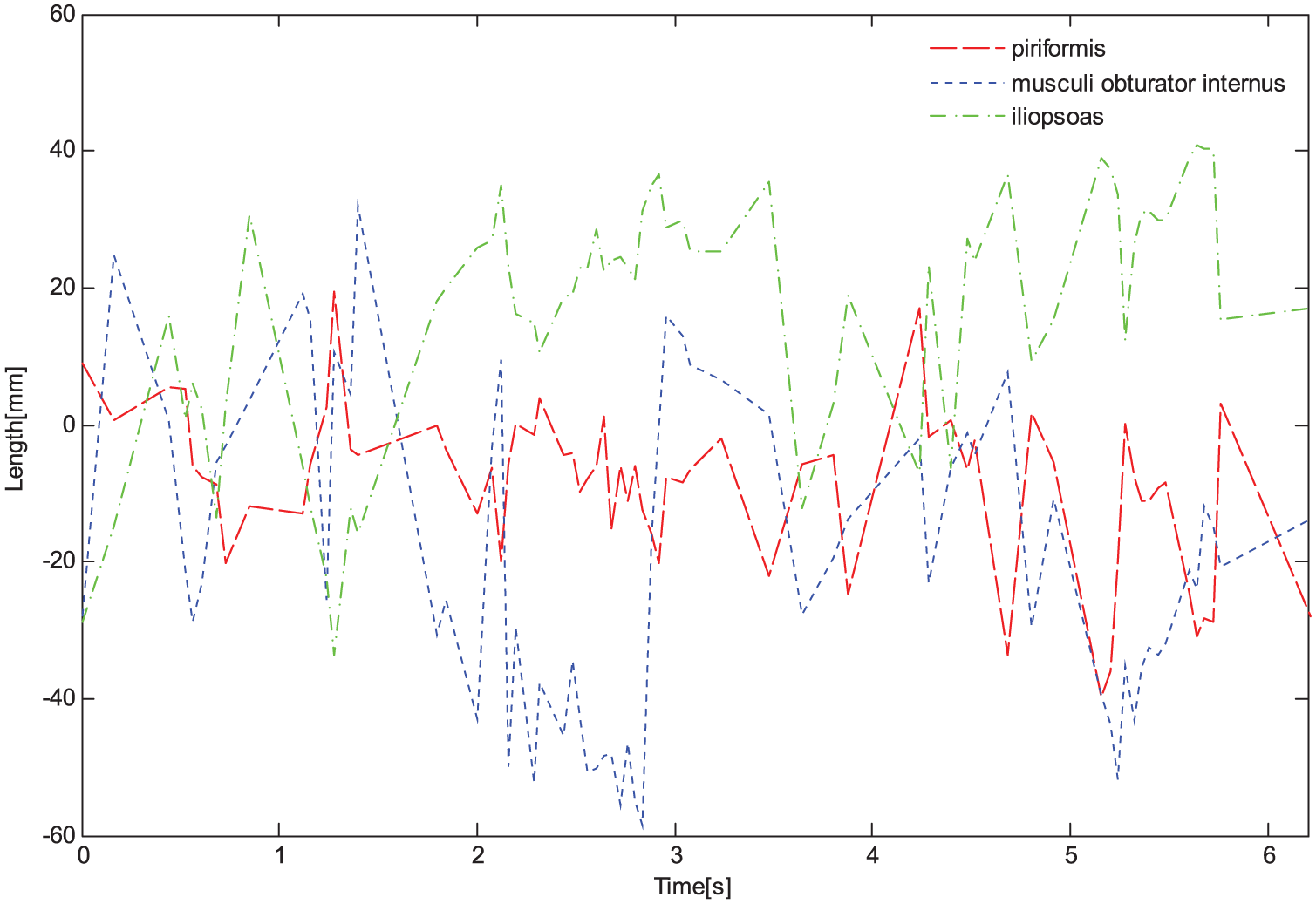
Figure 12 shows change in muscle length. When combined with Figure 10 during isobaric expansion, although the air pressure remained constant in the piriformis and musculi obturator internus, their lengths change during the whole process. The tension and contraction in the iliopsoas work together to realize trajectories tracking. It also further proved that the movement of the limb is realized by different muscles that are compatible with each other, which is natural evolution.
Muscle length change over time.
Conclusion
In conclusion, we design a spatial humanoid lower limb driven by PAM, which can be simplified as a parallel mechanism. Then, it was simplified into a nonlinear MIMO system through deducing the dynamics of the hip joint and using angular velocities and angular accelerations as input. However, two variables were not measured directly. Therefore, a fuzzy adaptive observer was designed to estimate and control variables, while through the combination of Gauss basis neural network function, a novel Gauss basis fuzzy adaptive control algorithm was constructed. In addition, proposed control algorithm was verified by the experiment.
Footnotes
Academic Editor: Hamid Reza Shaker
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China under grant no. E050202 and the Natural Science Foundation of Zhejiang province under grant no. LY13E050004.
References
1.
SayamaKMasutaHLimH. Development of one-legged jumping robot with artificial musculoskeletal system. In: Proceedings of the 2012 9th international conference on ubiquitous robots and ambient intelligence (URAI), Daejeon, South Korea, 26–28 November 2012, pp.608–613. New York: IEEE.
2.
NariokaKHommaTHosodaK. Humanlike ankle-foot complex for a biped robot. In: Proceedings of the 2012 12th IEEE-RAS international conference on humanoid robots, Osaka, Japan, 29 November–1 December 2012, pp.15–20. New York: IEEE.
3.
HosodaKSakaguchiYTakayamaH. Pneumatic-driven jumping robot with anthropomorphic muscular skeleton structure. Auton Robot2010; 28: 307–316.
4.
ChoiTYChoiBSSeoKH.Position and compliance control of a pneumatic muscle actuated manipulator for enhanced safety. IEEE T Contr Syst T2011; 19: 832–842.
5.
XingKYHuangJWangY. Tracking control of pneumatic artificial muscle actuators based on sliding mode and non-linear disturbance observer. IET Control Theory A2010; 4: 2058–2070.
6.
XuGSongALiH.Adaptive impedance control for upper-limb rehabilitation robot using evolutionary dynamic recurrent fuzzy neural network. J Intell Robot Syst2011; 62: 501–525.
7.
EfeM.Fractional fuzzy adaptive sliding-mode control of a 2-DOF direct-drive robot arm. IEEE T Syst Man Cy B2008; 38: 1561–1570.
8.
ChangMK.An adaptive self-organizing fuzzy sliding mode controller for a 2-DOF rehabilitation robot actuated by pneumatic muscle actuators. Control Eng Pract2010; 18: 13–22.
9.
AnhHPH. Online tuning gain scheduling MIMO neural PID control of the 2-axes pneumatic artificial muscle (PAM) robot arm. Expert Syst Appl2010; 37: 6547–6560.
10.
AnhHPHAhnKK. Hybrid control of a pneumatic artificial muscle (PAM) robot arm using an inverse NARX fuzzy model. Eng Appl Artif Intel2011; 24: 697–716.
11.
Van DammeMVanderborghtBVerrelstB. Proxy-based sliding mode control of a planar pneumatic manipulator. Int J Robot Res2009; 28: 266–284.
12.
BraikiaKChettouhMTonduB. Improved control strategy of 2-sliding controls applied to a flexible robot arm. Adv Robotics2011; 25: 1515–1538.
KozukiTMizoguchiHAsanoY. Design methodology for the thorax and shoulder of human mimetic musculoskeletal humanoid Kenshiro-A thorax structure with rib like surface. In: Proceeding of the 2012 IEEE/RSJ international conference on intelligent robots and systems, Vilamoura, Portugal, 7–12 October 2012, pp.3687–3692. New York: IEEE.
15.
ShirafujiSHosodaK.Detection and prevention of slip using sensors with different properties embedded in elastic artificial skin on the basis of previous experience. Robot Auton Syst2014; 62: 46–52.
16.
OgawaKNariokaKHosodaK. Development of whole-body humanoid “Pneumat-BS” with pneumatic musculoskeletal system. In: Proceeding of the 2011 IEEE/RSJ international conference on intelligent robots and systems, San Francisco, CA, 25–30 September 2011, pp.4838–4843. New York: IEEE.
17.
ChenYZhangJYangC. Design and hybrid control of the pneumatic force-feedback systems for Arm-Exoskeleton by using on/off valve. Mechatronics2007; 17: 325–335.
18.
ZhuXTaoGYaoB. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles. Automatica2008; 44: 2248–2257.
19.
ShiGShenW.Hybrid control of a parallel platform based on pneumatic artificial muscles combining sliding mode controller and adaptive fuzzy CMAC. Control Eng Pract2013; 21: 76–86.
20.
JiangFTaoGLiuH. Research on PMA properties and humanoid lower limb application. In: Proceeding of the 2015 IEEE international conference on advanced intelligent mechatronics (AIM), Busan, South Korea, 7–11 July 2015, pp.1292–1297. New York: IEEE.
21.
JiangFTaoGLiuH. Modeling and simulation of humanoid lower limb based on pneumatic artificial muscle. In: Proceeding of the 2015 IEEE international conference on information and automation, Lijiang, China, 8–11 August 2015, pp.348–352. New York: IEEE.
22.
WangYChaiTZhangY.State observer-based adaptive fuzzy output-feedback control for a class of uncertain nonlinear systems. Inform Sciences2010; 180: 5029–5040.
23.
HuoBTongSLiY.Adaptive fuzzy fault-tolerant output feedback control of uncertain nonlinear systems with actuator faults. Int J Syst Sci2013; 44: 2365–2376.
24.
TongSLiYLiY.Observer-based adaptive fuzzy backstepping control for a class of stochastic nonlinear strict-feedback systems. IEEE T Syst Man Cy C2011; 41: 1693–1704.
25.
AlouiSPagèsOEl HajjajiA.Improved fuzzy sliding mode control for a class of MIMO nonlinear uncertain and perturbed systems. Appl Soft Comput2011; 11: 820–826.
26.
LinTCLiuHLKuoMJ.Direct adaptive interval type-2 fuzzy control of multivariable nonlinear systems. Eng Appl Artif Intel2009; 22: 420–430.
27.
DoudouSKhaberF.Direct adaptive fuzzy control of a class of MIMO non-affine nonlinear systems. Int J Syst Sci2012; 43: 1029–1038.
28.
BoulkrouneAM’SaadMFarzaM.Adaptive fuzzy controller for multivariable nonlinear state time-varying delay systems subject to input nonlinearities. Fuzzy Set Syst2011; 164: 45–65.
29.
LinTC.Based on interval type-2 fuzzy-neural network direct adaptive sliding mode control for SISO nonlinear systems. Commun Nonlinear Sci2010; 15: 4084–4099.
30.
YuWSWengCC.An observer-based adaptive neural network tracking control of robotic systems. Appl Soft Comput2013; 13: 4645–4658.