
Abstract
In this article, a fuzzy-approximation-based adaptive backstepping control method for dual-arm of a humanoid robot was proposed. The purpose of this control system is to provide coordinated movement assistance to enable the humanoid robot’s human-like forearm to grab objects coordinately (or track any continuous desired trajectory), even in the presence of environmental disturbances and parametric uncertainties. We analyze the proposed adaptive backstepping by mathematical modeling and actually measure the robot dual-arm motion information of a number of case when they simulate the trajectory to verify the model. We design the adaptive fuzzy-approximation control strategy and combining the synthesis of the robust design, backstepping control, and Lyapunov function method, the proposed adaptive fuzzy backstepping control does not need to know the humanoid robot’s arms model precisely. In the control system proposed here, once the desired trajectories of the robot’s dual-arm positions are given, the adaptive fuzzy system was closed to any unknown functions and to the derivative of the virtual control law of the humanoid robot system. In this case, a robust design scheme was utilized to compensate for any approximation errors. With the proposed trajectory tracking, not only able to generate the coordinate motions for a humanoid robot’s two arms, but it can also control the arms to move to the desired positions. The proposed closed-loop system under the adaptive fuzzy backstepping control design was effective and that asymptotic stability was successfully achieved. The adaptive fuzzy-approximation backstepping control strategy should be more complete and intelligent and more actual test should be conducted to further evaluate the effect of the proposed trajectory tracking. The instability of dual-arm of humanoid robot system is systematically analyzed and a backstepping control strategy based on the adaptive fuzzy-approximation to improve the continuity of trajectory tracking of the robot’s arms is proposed.
Introduction
Humanoid dual-arm robots have recently attracted the attention of researchers, since they can potentially replace a vast number of repetitive and tedious human movements. Moreover, these arms can be programmed with complex coordinates in dangerous environments, where actions can only be completed by robotic dual-arms. Researchers have paid a great deal of attention to this new technology for both social services and industrial purposes. 1 –5 In our daily lives, the coordinate motion of arms is evident all around us. For example, people usually swing both arms when running or walking. It is necessary to enable a robot to display the same coordinate movements as actual humans. In industrial production, the design of a cyclic motion-generation scheme, which can achieve repetitive motion, is an interesting and necessary area of research. However, it is well-known that the repetitive movements that are currently possible are due to the single manipulator. 6,7 More complicated tasks and constraints in a multiple robot system 8,9 must consider, for example, a robust coordinated movement.
Since humanoid dual-arm robot systems are usually used as whole transportation devices that move in space while balancing their movement, it is more challenging to control them than to control single-manipulator systems (whose single constraint is usually a mechanical limit). Therefore, where humanoid dual-arm control is concerned, it is necessary to consider the nonholonomic constraint force between the arms themselves and the external environments (the contact object) that helps robots avoid tumbling and collisions. A number of studies have proposed control techniques to achieve sufficient control performance of a humanoid dual-arm robot. In the study by Zhang et al., 10 the dual-arm cyclic-motion-generation (DACMG) scheme was extended into time-varying-constrained TVC-DACMG, which is a natural combination of arms designed to move to the desired position. The HMM 11,12 was used to address the real time. In Asfour et al.’s study, 13 an imitation learning approach was presented, and continuous hidden Markov models (HMMs) were demonstrated for the motion of both arms in tasks performed by a dual-arm humanoid robot. In the study by Li et al., 14 a robust adaptive fuzzy output feedback control is proposed for a class of single-input and single-output nonlinear systems in strict-feedback form. In the study by Ko and Sim, 15 an imitative neural mechanism was considered for recognizing behavior intention in the interaction between humans and robots. Božek 16 , in his study, describes the system activity and the importance of autonomous inertial navigation system (INS) and its implementation to control the robotic arm. However, in previous 10,13 –15 works, exact model parameters are generally required. Prior research has proposed a variety of methods to optimize and control the robot’s arms. The suggested systems are frequently subjected to complex and unknown environmental disturbances and uncertainties. 10,17 –20 When the humanoid robot has performed the above-mentioned tasks, the object-grabbing arms can produce movement and force distribution of two kinds of state. However, motion and force are a strong coupling. To solve this problem, control schemes that combine motion and force have been proposed. 21 –24 Recently, important research has proposed a class of adaptive fuzzy tracking control for uncertain MIMO nonlinear dynamical systems, such as robotic manipulators. 24 –28 Iterative learning control can provide high precision for the uncertainty of important equipment in various applications. 29 –33 The advantage of iterative learning control is that it does not need knowledge of system dynamics. However, this will bring a lot of the initial error in early iterations, with the increase in the number of iterations, the convergence rate of the tracking error is very slow. A sliding mode control (SMC) is strongly robust, has fast corresponding characteristics, and is, therefore, an ideal tool to process mixed system coupling. 34 The results of the study showed that the backstepping SMC technique is adopted to achieve the balancing and trajectory tracking of the two-wheeled balancing mobile robots, whereas both model uncertainties and exogenous disturbance are taken into account in the controller design methodology. 35 Therefore, the SMC combined with the backstepping control proved effective in the two-wheeled balancing mobile robots control process.
In this article, an adaptive fuzzy approximation backstepping control approach is developed for dual-arm of humanoid robot with trajectory tracking. This system makes full use of fuzzy approximation to derivate virtual control and unknown functions in the system. At the same time, the robust design can be utilized to compensate for approximation errors. This proposed fuzzy approximation and adaptive backstepping control scheme not only improves the system’s dynamical performance but also avoids traditional backstepping controllers when solving the virtual control law that is caused by complex problems. Further, it is proved that the proposed control approach can guarantee that all the variables of the closed-loop system are asymptotic in terms of stability and also that the tracking errors converge to a small neighborhood of the origin.
Compared with the existing results, the main contributions of this article can be summarized as follows: (1) the proposed fuzzy approximation-based adaptive backstepping control approach can be applied to possess environmental disturbances and parametric uncertainties systems with a humanoid robot’s human-like forearm to grab objects. Although the same problem has been addressed in previous studies, 24,28,36 they are limited to a class based on sensor and fuzzy inference systems. Therefore, they cannot be applied to the unmodeled dynamics, uncertain parameters, and unknown interference and error boundaries. (2) Since a robust scheme is designed to compensate for an approximation error, the proposed adaptive fuzzy backstepping control (AFBC) approach can accurately track the trajectory of the robot arm, does not need to know the humanoid robot’s arms model precisely. Meanwhile, this design adjusts upper error boundaries online, the stability of the whole closed-loop system is guaranteed.
The article’s organization is as follows. The second section presents the humanoid robot’s dual-arm’s dynamics. the third section presents our control development. The fourth section features the experimental application on the humanoid robot’s dual-arm system. The fifth section outlines the article’s simulation and experiment results. The sixth section offers our conclusions.
Dynamics of dual-arm with humanoid robot
Inspired by previous studies, 37,38 the 7-degrees-of-freedom (7-DOF) dynamics of a dual-arm with a humanoid robot system can be described in the task space as


where
Assumption
The time-varying disturbances
Each joint in the humanoid robot’s arms is driven by a direct current (DC) servomotor, with the manipulator–actuator dynamics at the motor shaft. Each joint is also driven by a DC servo motor through a harmonic drive transmission system. Therefore, the dual-arm with a humanoid robot dynamic model can be written as

where
Property
The inertia matrix

Control development
Control objective
The control objective is to design a boundary controller for the system’s unknown parts, using a universal fuzzy approximation performance of the system to coordinate the tracking arms’ object-grabbing trajectory. Simultaneously, the internal force between the objects and each end-effectors are maintained bounded and asymptotic stability.
In this part, we propose an approximation-based adaptive backstepping control for dual arm of a humanoid robot to track the desired periodic trajectories. Dynamics (3) can be rewritten as a state space equation described by

where
The task space that is needed for the input command assumes that values already exist and that the twice differentiable is satisfied. The output command ensures that the robots track the desired trajectory in the selected task space, that all the signals in the closed-loop system remain uniform and ultimately bounded, and that the state index for tracking error convergence remains within a small range of zero. In this way, a sufficiently accurate approximation of the dynamic uncertainty of the tracking trajectory can be achieved.
Fuzzy system approximators
This article adopts fuzzy logic systems (FLS). Consider n-inputs, single-output FLS
39
–41
with the product-inference rule, Gaussian membership function given by N fuzzy IF–THEN rules
where
The output of the fuzzy system can be described as

where
However, equation (4) is a highly complicated function with unknown dynamics. Here, we employ the approximation function to approximate

where the vector
Adaptive fuzzy backstepping controller design
Step 1: Define error variables, assuming

where H is the inertial matrix of the robotic arm. C is the Coriolis and centrifugal matrix,
Supposing


where χ is the estimated value of

We assume that the humanoid robot’s arms are the pseudoinverse

where
Step 2: Differentiating

Since



where

Robust adaptive backstepping control chart based on fuzzy system approximator.
Remarks
The adaptive control law (14) consists of a tracking error feedback law and an estimate of the dynamic compensation. The last term is used to compensate for the uncertainty of the robust design (16), and the estimated dynamic parameters
Application to the humanoid dual-arm robots system
Firstly, we provide an overview of the hardware used. As Figure 2(a) shows, a humanoid robot was set up to compete on behalf of the Chinese team at the DARPA Robotics Challenge Xing-Tian (DRC-XT) in Pomona, California. Xing-Tian is a life-sized humanoid robot whose height and weight are 160 cm and 80 kg, respectively. Its autonomic movement was achieved by integrating DRC-XT with an automated system. We utilized the PCAN motion control card as the system’s motion controller. The alternate current (AC) servo driver drives the servo motor, and the robot’s joints are in turn driven by these motors. Furthermore, by integrating visual C++, HRP, and MATLAB programs on a host PC, the proposed control algorithm was implemented to control and monitor DRC-XT’s real-time movement. Additionally, a master–slave wireless router transmission link was utilized to transfer communications, such as the system’s state information and command signals, between the CAN bus and the host PC. Figure 2(b) depicts Xing-Tian’s three-dimensional simulation. The dual-arm robot has 14 DOFs, and every wrist joint has been equipped with a 6-D force sensor. The manipulated object is a plastic box, weighing 2000 g.

Humanoid robot: Xing-Tian. (a) Snapshot of Xing-Tian. (b) Three-dimensional simulation of Xing-Tian.
Simulation and experiment results
In this section, we outline the experiment and simulation that was performed to evaluate the aforementioned control algorithm’s performance. For simulation, we considered a planar, two-link robot arm system setup with the following initial conditions.
An assumed user could select up to three different tasks: firstly, fuzzy controls experiments based on disturbance learning. In case 1, we defined disturbance
The controlled object is the dual-arm manipulation of the humanoid robot, where


The system parameters are chosen as
The definitions of the nine fuzzy sets are as follows: negative-big, negative-middle-big, negative-middle-small, zero, positive-small, positive-medium-small, positive-medium-big, and positive-big.

For case 1, the dual-arm’s input control signal is shown in Figure 3(a); the dual-arm’s position tracking trajectory is shown in Figure 3(b); and the dual-arm’s output error of the system is shown in Figure 3(c).
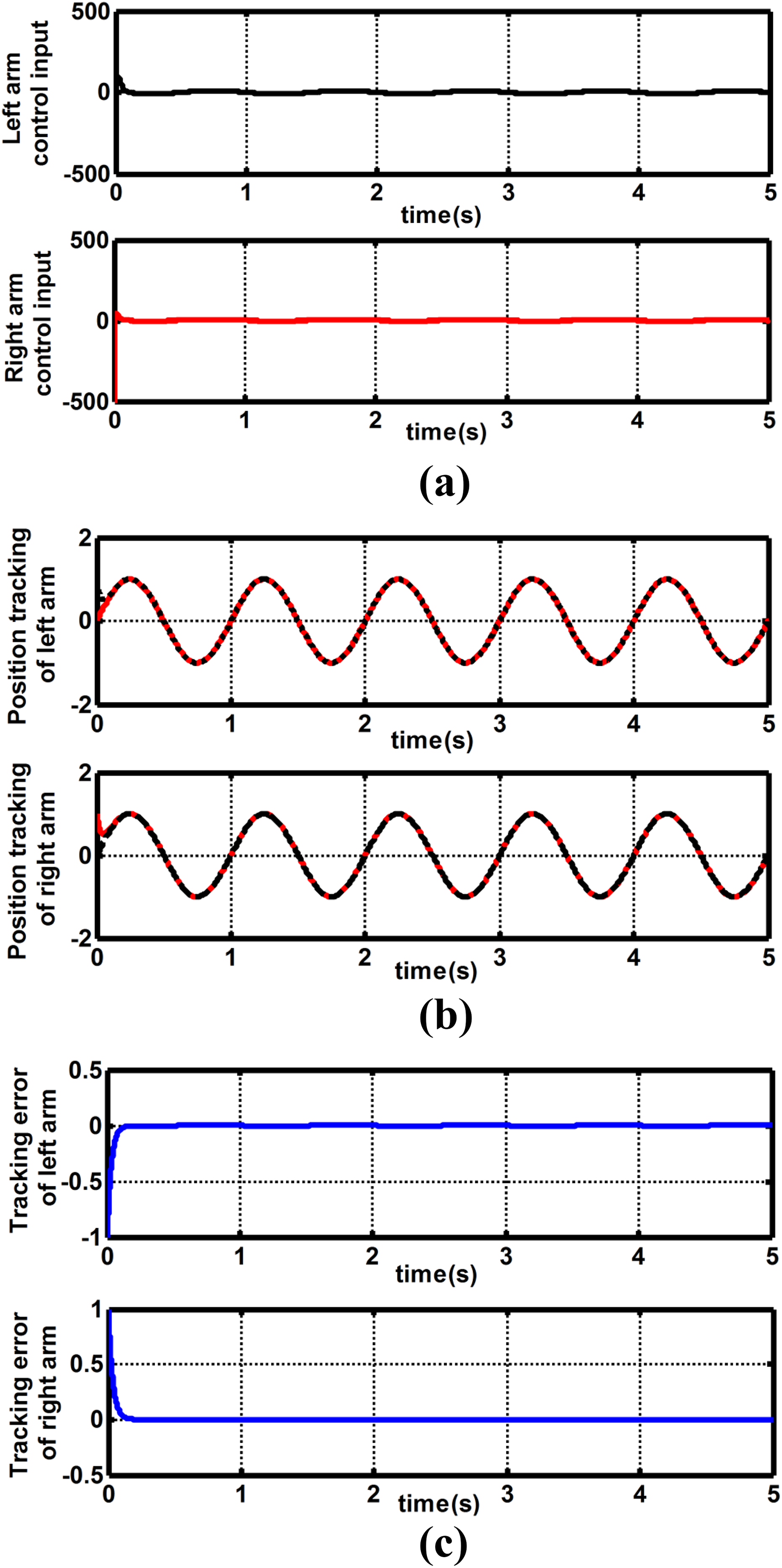
(a). Dual-arm input control signal using the proposed control. (b). Dual-arm position tracking trajectory using the proposed control. (c). Dual-arm tracking trajectory error using the proposed control.
To demonstrate the validity of the proposed control method, the first experiment has been made on a dual-arm robot. The dual-arm robot has a DOF of 14, and every wrist joint has been equipped with a 6-D force sensor. The manipulated object is a plastic box, which is 1000 g in weight, 220 mm in length, 200 mm in width, and 100 mm in height.
The experimental system is shown in Figure 4, between fingers and objects for the contact spot, there is no relative movement between the ends of the fingers and objects.

The noumenon of the7-DOF robot arm motion test process.
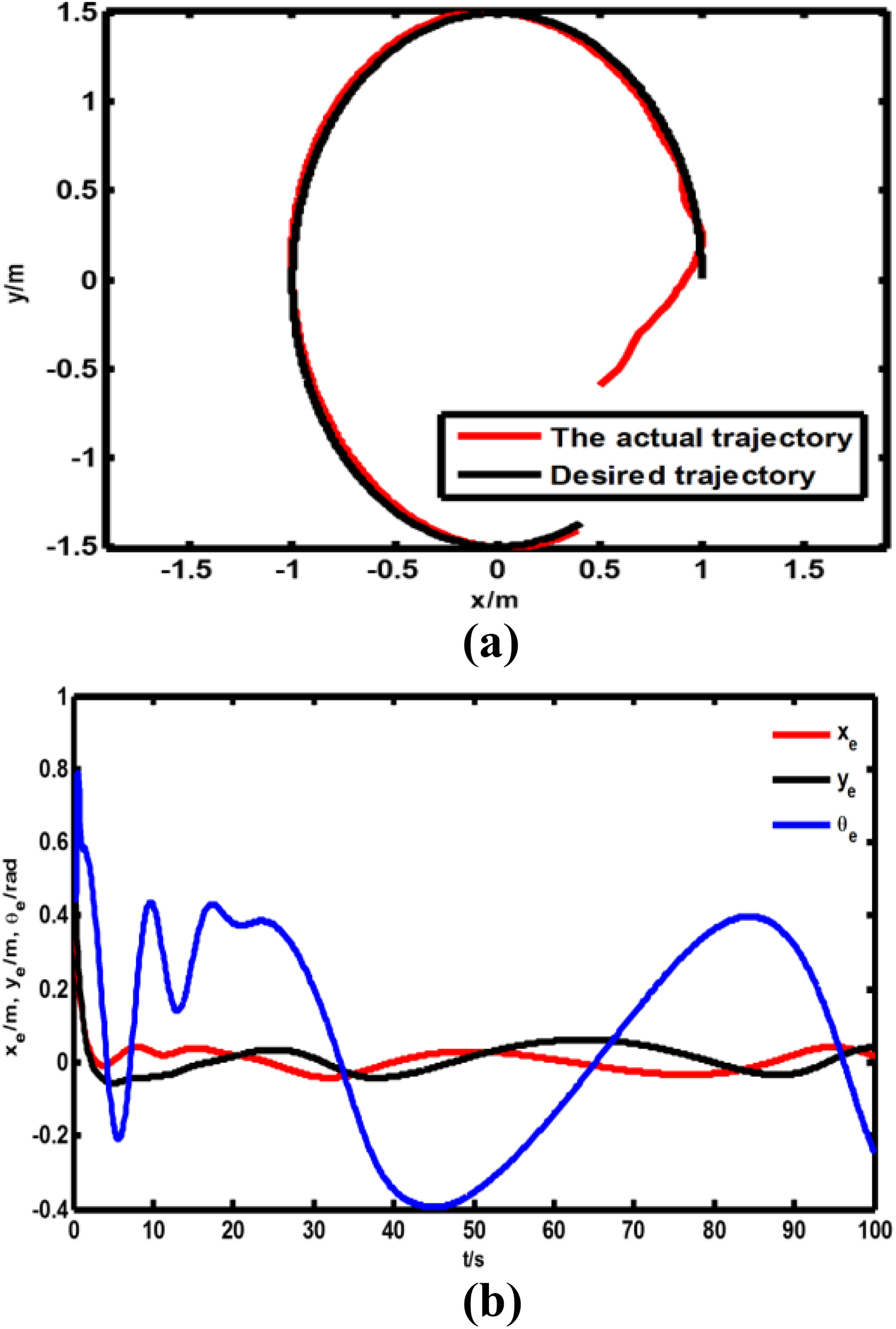
The clamping arms handling box test result tracking results as showed in Figure 5. Figure 5(a) shows the trajectory change curve of the robot in the process of object handling. Since there is a rotational transformation between the world coordinate system of the robot right arm and the Matlab drawing tool coordinates system, the rotation of the X-axis is 90 degrees. The data in Figure 5(b) are changed from Figure 5(a) by rotation, and it’s time change trend is consistent with the robot coordinate system. And, the fifth picture shows the double arms’ posture of the robot when the box is dropped out. According to the analysis of the recorded data of the right arm, we set its starting, intermediate, and end coordinates, respectively, (0.45, 115, −0.04), (0.45, 115, −0.2) and (0.45, 115, −0.04), and (0.45, 115, −0.2). Figure 5(a) displays the right arm’s reference coordinates system. And, the errors of actual motion and tracking trajectory are demonstrated in Figure 5(b) and (c).

Response curve of space motion trajectory of dual-arm coordinated gripper. (a) Trajectory tracking chart. (b) Coordinate transformation chart of trajectory tracking. (c) Trajectory tracking error curve.
From Figure 5(b), the actual trajectory tracking direction could be seen, which indicates that the actual tracking error is large at the initial stage. However, as the tracking task continues, its actual trajectory tracking motion tends to remain stable. From the error curve of the three directions in Figure 5(c), we can see that the change in the actual error is gradually convergent.
In case 2, the dual-arm’s position tracking trajectory is shown in Figure 6(a); and the dual-arm’s output error of the system is shown in Figure 6(b).

(a) Dual-arm position tracking trajectory using the proposed control. (b) Dual-arm tracking trajectory error using the proposed control.
The second experiment is considered the following system output trajectory tracking with the dual-arm of a humanoid robot. The experiment was performed on the 7-DOF dual-arm of a humanoid, and it was operated in the actual task environment. This robot was given the task of opening the door. The experimental system, as well as system parameter selection, including previous study by Bai et al., 23 is presented as follows. As Figure 7 shows, the humanoid robot was given the special task of opening a door.

Mechanical arm test process—opening a door.
The purpose of the dual-arm open door experiment is to realize the anthropomorphic autonomous control of the dual-arm robot. The experiment first pushed the door handles down with the right hand and then pushed the left arm forward against the front of the door. If the door could be opened, the task would be completed. In this process, the humanoid door opening requires not only the vision to give the robot accurate target positioning but also the coordination of the two arms to complete. Because the opening process does not require much force, the position tracking control based on binocular vision can complete the opening experiment. Figure 7(a) to (d) is the whole process of the experiment, in which (a) the two arms are initialized, and the binocular visual target points are extracted; (b) the right hand reaches the target point (door handle), ready to press down, and the left arm approaches the front of the door; (c) the right arm unlocks and the left arm pushes the door forward, while the right arm pushes the door together; (d) the right arm pushes the door, and the right arm pushes the door together. Push the door simultaneously with both arms to complete the door opening experiment. From the point of view of the completion of the experiment, the double-arm robot successfully opened the door a series of actions, from the task of unlocking, pushing and opening the door by pressing the door handles.
Figure 8(a) and (b) shows robot open the door of dual-arm shoulder joints motion trajectory tracking result and motion errors in a periodical trajectory.
The dual-arms shoulder joints in a periodical trajectory. (a) The motion trajectory tracking result and (b) the motion errors.
Experimental results with the humanoid for the shoulder joint are depicted in Figure 8 using the proposed approach. It is seen from the topmost plots that the desired trajectories (solid line) nearly overlapped with the measured ones (dotted line) in Figure 8(a).
From these figures, even if we don’t know the disturbance of humanoid robot’s dynamics and environment, we can still get the desired performance by the proposed control scheme. From the experiments, we can see that the actual position converge to the desired trajectory in Figure 8(a). To further evaluate the performance of the proposed method, a comparative experiment using fuzzy control without disturbance learning was carried out in the same environment.
Under the same conditions, a comparative test was carried out by PD control. The control results are displayed as showed in Figures 9 and 10. It can be seen from the top diagram that the desired trajectories (solid line) nearly overlapped with the measured ones (dotted line) in Figure 9(a) and (b). The deviation errors between the desired and measured trajectories is shown in Figure 9(c) and (d). The proposed controller and the PD control scheme are compared. The proposed control scheme tracking error is uniform and smaller. Figure 10 describes the comparison of robot wrist tracking performance.

Position tracking and error comparison diagram of shoulder joint using different control methods. (a) Position tracking of the shoulder joint using the proposed control, (b) position tracking of the shoulder joint using the fuzzy control, (c) position tracking of the shoulder joint using PD control, (d) position error of the shoulder joint using the proposed control, (e) position error of the shoulder joint using the fuzzy control, (f) position error of the shoulder joint using PD control. PD: proportional–derivative.

Position tracking and error comparison diagram of wrist joint using different control methods. (a) Position tracking of the wrist joint using the proposed control, (b) position tracking of the wrist joint using the fuzzy control, (c) position tracking of the wrist joint using PD control, (d) position error of the wrist joint using the proposed control, (e) position error of the wrist joint using the fuzzy control, (f) position error of the wrist joint using PD control.
Because the system hardware communicates with the communication host and the controller through the CAN bus, although in theory we can choose a smaller sampling time, in the actual execution, the minimum sampling time under the constraints is 20 ms. On the other hand, we can see from Figures 9 and 10 that the tracking error of PD cannot converge as smaller as the time going, no matter how the parameters are selected, but the tracking error can converge to smaller and smaller with the control method proposed in this article. In terms of performance index, it can be seen from the Figures 9 and 10 that the controller for PD control performance is the worst among the three controllers with the largest control input and tracking errors, while the proposed control performs better in comparison with the fuzzy control. Since the repetition period of the desired trajectory is selected, interference learning can reduce control input and tracking error. Compared with PD controller and fuzzy control and the proposed controller, the proposed control input and tracking error can significantly be reduced.
If the dual-arms’ motion is

Dual-arm motion internal force response curves in the limited space.
Figure 12 shows the input torque curve of each joint of the robot system based on the energy minimization method for internal force planning. Figure 12(a) and (b), respectively, represents the left arm and the right arm of the robot. The curve clearly reflects the change of torque of each joint. Taking the sum function of each joint torque function of the two-arm system as the energy cost function and the lowest energy consumption of the whole system as the optimization objective, the force acting on the end of the manipulator is calculated. Through the quadratic programming of the internal force of the robot’s arms, the motion planning of each joint of the robot is achieved.

Robot dual-arms open door joint input torque curve. (a) left arm, (b) right arm.
The simulation and experimental results we obtained demonstrate that the proposed scheme can effectively compensate for any approximation errors in a humanoid robot’s dual-arm system. Also, note that while the object motion is required for adaptive fuzzy approximation backstepping in space motion, the adaptive fuzzy approximation backstepping robust compensator we propose effectively prevents the complex problem of control law that is often found with a traditional backstepping method. In our method, the object is quickly converging to an equilibrium position in free-motion space. The motion error is guaranteed to converge within a small neighborhood of the origin, given Lyapunov’s stability theory. When the object tracks the motion in a limited space, any location error that results tends to be small, and the internal forces change smoothly.
Therefore, we see that the PD controller fail to achieve satisfactory performance indicators when compared with the proposed controller. The method suggested in this article was able to achieve a superior control strategy.
Conclusions
In this article, a fuzzy approximation based on adaptive backstepping robust control was studied, which combines the iterative learning control with the motion of a humanoid manipulator. This approach was suggested to provide a reference and to enable the robot’s arms to perform continuous trajectory tracking, even in the presence of unmodeled dynamics, uncertain parameters, and unknown interferences and error boundaries. Since the arms’ uncertainty drives the dynamic, the stability of fuzzy approximation design could track the desired trajectory and did not require an accurate dynamic model. This new design of a robust AFBC method guarantees that the closed-loop system was uniformly ultimately bounded and that the tracking error converges to zero. Additionally, this improved design compensates for approximation errors and adjusts upper error boundaries online. The controller’s observed performance during our simulation and experiment demonstrates its validity. Tested in an actual environment and produces superior results to traditional PD control and fuzzy control short-term load forecasting. Although this method has many advantages, it still has many deficiencies in real time. Further optimization algorithms are needed to improve tracking efficiency. In future research, the proposed control scheme will be implemented to a space robot’s flexible robotic arm systems and medical services robotic arm in practical applications.
Footnotes
Acknowledgements
The authors appreciate the comments and valuable suggestions of anonymous referees and editors for improving the quality of the paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of following financial support for the research, authorship, and/or publication of this article: This work was supported by a project of the research fund for PhD of Southwest University of Science and Technology (Grant No. 17zx7157).