
Abstract
In order to design a comfortable-oriented vehicle suspension structure, the network synthesis method was utilized to transfer the problem into solving a timing robust control problem and determine the structure of “inerter–spring–damper” suspension. Bilinear Matrix Inequality was utilized to obtain the timing transfer function. Then, the transfer function of suspension system can be physically implemented by passive elements such as spring, damper, and inerter. By analyzing the sensitivity and quantum genetic algorithm, the optimized parameters of inerter–spring–damper suspension were determined. A quarter-car model was established. The performance of the inerter–spring–damper suspension was verified under random input. The simulation results manifested that the dynamic performance of the proposed suspension was enhanced in contrast with traditional suspension. The root mean square of vehicle body acceleration decreases by 18.9%. The inerter–spring–damper suspension can inhibit the vertical vibration within the frequency of 1–3 Hz effectively and enhance the performance of ride comfort significantly.
Suspension directly affects the riding comfort, handling stability and driving safety 1 of the vehicle. Spring and damper are the main components of traditional suspension system. However, there is continued to be numerous unsolved problems such as the contradiction between the riding comfort and handling stability. Smith 2 proposed the inerter element based on electromechanical similarity theory and applied it into the vehicle suspension systems. 3 Mechanical network with inerter has more abundant network features in comparison with the mechanical network just consisting of spring and damper. 4 In addition, the emergence of the inerter makes the mechanical, as well as electrical, network strictly corresponding to each other. Therefore, RLC (resistor (R), inductor (L), and capacitor (C)) electrical network synthesis theory can be used to research inerter–spring–damper (ISD) mechanical network to improve the performance of mechanical vibration isolation system.
In recent years, the inerter becomes a research boiling spot in vehicle suspension systems, steering systems, and building vibration isolation system.5–14 Integrated and analysis network theory is applied to the study of ISD suspension system constantly. Based on network synthesis method, Wang and Chan 15 applied a novel mechatronic network strut with ball screw inerter and permanent magnet motor to vehicle suspensions. Then, he discusses the benefits of system performance. Simulation and experimental results shown the performance of this suspension is superior to traditional passive suspension. Scheibe and Smith 16 obtained the global optimum of riding comfort and handling stability from quarter-car vehicle suspension model via a method of network analysis. Chen et al.17–21 utilized graph theory and several existing results of n-port impedance network and concerned with the minimal realization problem of a third-order real symmetric matrix as the admittance of three-port impedance network. Hu and Chen utilized inerter into passive vehicle suspensions and semiactive suspensions. 22,23 They analyzed and optimized the inerter-based isolators based on a “uni-axial” single-degree-of-freedom isolation system. 24 Ming et al. 25 systematically explained the concept, background and characteristics of the inerter and ISD suspension by summarizing its structure types, dynamics, frequency responses, nonlinear characteristics and breakdown phenomena, network synthesis theory and application layout and integrated design. The ISD suspension structure which consists of the inerter, spring, and damper is various. So far, the study of ISD suspension is to assume the suspension structure first and then utilize various methods to optimize the suspension structure parameters. This may limit ISD network into a few fixed structures; we might neglect a slice of good structures.
To contain more suspension structures, this article will solve the robust of positive-real controller based on bilinear matrix inequality (BMI) instead of the problem of suspension structure. Genetic algorithm is combined with linear matrix inequality (LMI) algorithm for BMI, and the root mean square (RMS) of vehicle body acceleration is used to indicate the performance for single objective comprehensive. The aim of this article is to find out an ISD suspension structure which is comfort-oriented. Parameter sensitivity analysis and quantum genetic algorithm are used to optimize and simulate it. The dynamic response and the improvement of the ISD suspension, compared with traditional passive suspension, are investigated under the condition of random incentive.
Network synthesis for the ISD suspension system
The suspension system is viewed as a mechanical network, which is corresponded with electrical network synthesis. The positive-real impedance suspension of the transfer function is solved based on the road input and the output of vehicle performance we desired. Then, it is implemented with inerter, spring, and damper.
Dynamic model of ISD quarter-car suspension
Elastic element is indispensable to the vehicle suspension system to maintain the vehicle mass. Figure 1 represents a quarter-car suspension model. The suspension structure is divided into known and unknown parts: the known part is the spring ks and the unknown part is
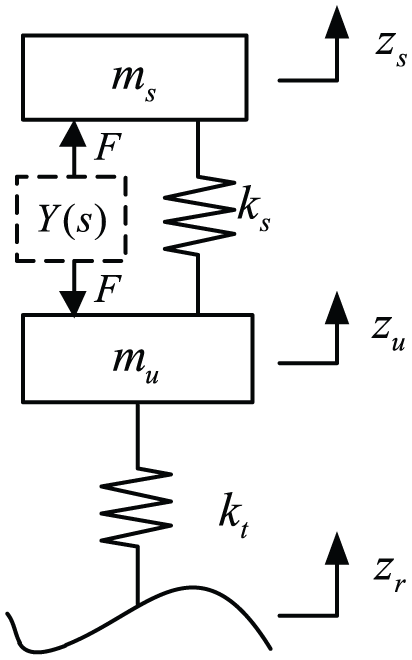
Quarter-car model.
In Figure 1,
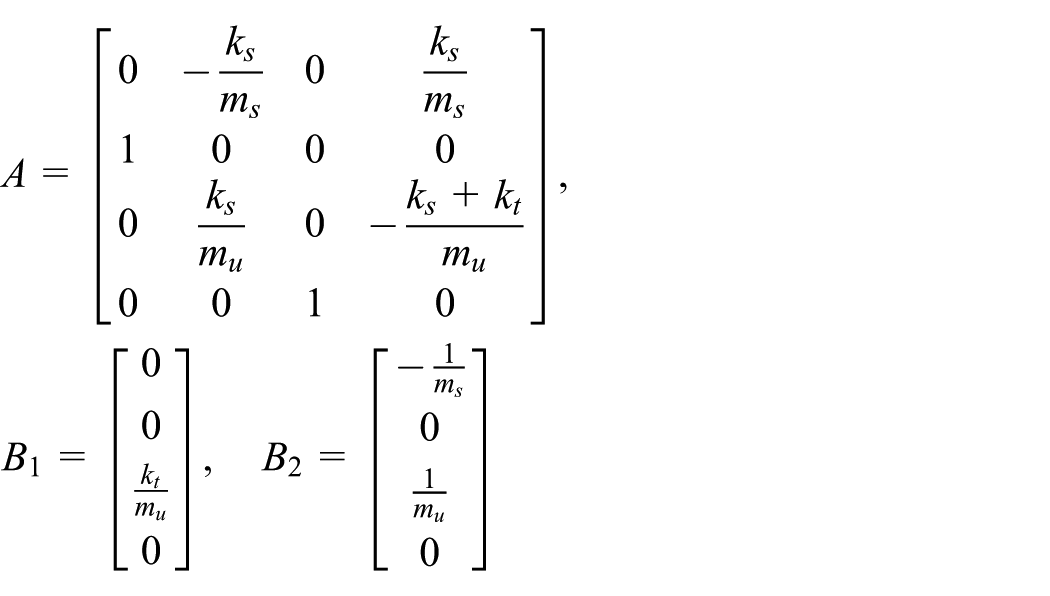
The dynamical equation is as follows

The state variable is

Among them
The design of H2 robust positive-real controller for ISD suspension networks
The sprung mass and unsprung mass relative velocity measurement are selected as output
Select sprung mass velocity as controlled output

To sweep into all kinds of ISD passive suspension system, we transform the problem of solving ISD suspension structure into robust control problem.
26
Accordingly,


In which
Combine the generalized suspension system, as well as robust controller, to form an augmented closed-loop system

In which
For the closed-loop system we mentioned above,
In which

The necessary and sufficient condition for controller K(s) positive-real is: the existence of symmetric positive definite matrix

Equations (7) and (8) are bilinear matrix inequalities.
Network synthesis utilizing BMI for ISD suspension
Take RMS value of the vehicle body acceleration optimization as objective and search ISD suspension structure of the vehicle to improve ride comfort.
According to Yu,
28
the transfer function

If the input y is the road input

The RMS value of the body acceleration J1 is as follows

To minimize the body acceleration RMS J1, namely, to minimize the transfer function norm from
Select sprung mass m2 = 320 kg, unsprung mass m1 = 45 kg, tire stiffness kt = 192 kN/m, the suspension spring stiffness ks = 18 kN/m, vehicle speed = 30 m/s, and the irregularities coefficient G0 = 6.4 × 10−7 m3/cycle. In MATLAB, LMI toolbox and genetic algorithm are combined with path-following methods to solve BMI. Take ks = 18 kN/m, and the third-order controller is obtained by

where

Implementation structure of the third-order controller.
In Figure 2, the implementation of the third-network controller structure is two-stage in series: the first stage consists of the spring k1 and damper c1 connected in parallel as the same traditional passive suspension; the second stage consists of the spring k2, the inerter b, and damper c2 connected in parallel. Considering the third-network controller structure has involved two springs in series and it did not need independent spring ks to support the vehicle static weight. The spring ks is removed and the parameters are re-optimized. The new structure is applied to vehicle suspension system. The structure of quarter-car model of ISD suspension is manifested in Figure 3.

Quarter-car model of ISD suspension.
Parameter optimization of ISD suspension
Sensitivity analysis
The parameters of ISD suspension obtained from network synthesis are complex. In order to optimize the key parameters and reduce the workload of model calibration, sensitivity analysis29,30 is utilized. Just a single parameter is tested for the influence extent of the model. Additional parameters take center elements’ parameter value. Utilizing the sensitivity coefficient as a measure of the sensitivity of the standard suspension parameters, the calculation formula is 31

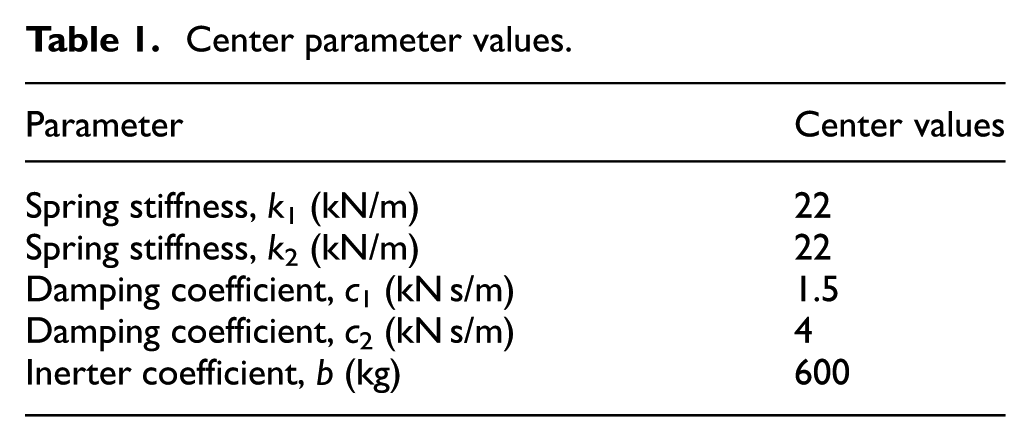
where Si is the ith parametric sensitivity of suspension parameter; pi is the change in the ith suspension parameter, center parameter values demonstrated in Table 1; and
Center parameter values.
Through simulation, the sensitivity of parameters is obtained as shown in Figure 4. As can be seen from Figure 4, different parameters have different effects on the body acceleration of the vehicle. The spring k1 has little effect on the body acceleration of the vehicle. So, only the value of spring k2, dampers c1, c2, and inerter b are taken into consideration.

Sensitivity of suspension parameters.
Quantum genetic algorithm
In traditional automobile design, the determination of the suspension parameters is considered the riding comfort of the vehicle on the road separately or for the purpose of reducing dynamic tire load. The aim of this article is to compare the overall performance between ISD suspension and traditional suspension and explore the potential advantages of ISD suspension. Comprehensively consider body acceleration, suspension working space, and dynamic tire load and utilize quantum genetic algorithm to determine the parameters of ISD suspension structure.
Quantum genetic algorithm is a genetic algorithm 32 on the base of the quantum computing theory. Through the time-domain simulation, the body acceleration RMS BA0, suspension working space RMS SWS0, and dynamic tire load RMS DTL0 of traditional passive suspension in the random input are obtained. The ISD suspension parameters are obtained in the same road input above.
This mathematical model of quantum genetic algorithm problem can be expressed as follows

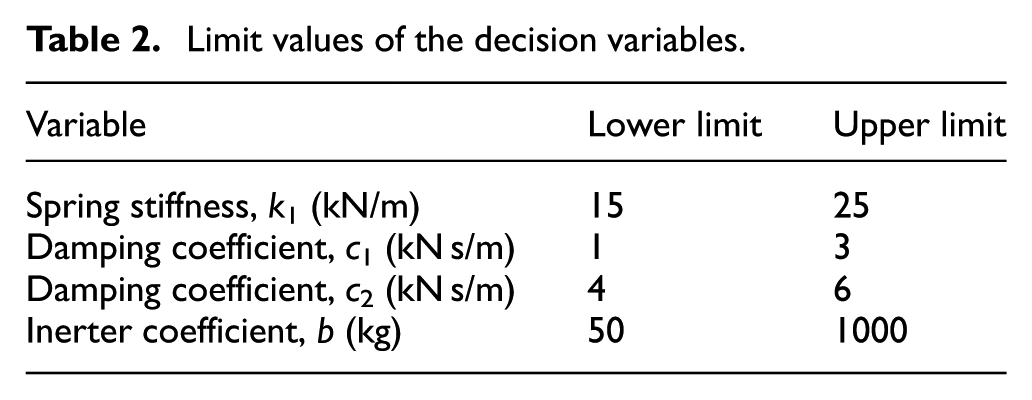
In which xi is the decision variable, and UB and LB represent its upper and lower limits, considering the actual suspension parameters of most cars; the limit values of the decision variables are demonstrated in Table 2.
Limit values of the decision variables.
In the progress of population initialization, the quantum code of each individual is initialized
The adjustment of quantum revolving gate is given as follows

The update process is as follows

In which
The population size at set at 40; the maximum hereditary algebra is set as 200. The parameters of ISD suspension were determined as show in Table 3.
Quantum genetic algorithm optimization results of the ISD suspension parameters.

Performance analysis of ISD suspension system
To analyze the performance of the ISD suspension, random road is taken as input to the traditional suspension for the comparative target. The parameters of the traditional suspension is k = 19 kN/m and c = 1.4 k N s/m. The system response is analyzed.
Taking integral white noise of time-domain expression as the road input model, the input equation is given by

In which
When the vehicle has u = 30 m/s passing roughness factor of G0 = 5 × 10−6 m3/cycle road. The system output power spectral density of random response is manifested in Figure 5. The response RMS value is demonstrated in Table 4.

Power spectral density of random response outputs: (a) body acceleration, (b) suspension working space, and (c) dynamic tire load.
RMS values of random response outputs.

As can be seen from Figure 5, in the high-frequency portion above 3 Hz, the power spectral density between ISD suspension and traditional suspension performance substantially coincide. But within the frequency of 0–3 Hz, compared with the traditional suspension, ISD suspension of body acceleration power spectral density and suspension working space power spectral density decreased. This indicates that the body resonance is significantly suppressed. Dynamic tire load power density within the frequency of 2–4 Hz also declined. Only within the frequency of 0–1 Hz, there is a slight deterioration. This is due to the inerter making the body resonance frequency point move forward. This indicates that the body resonance is significantly suppressed. Table 4 manifests that compared with traditional suspension, body acceleration RMS of ISD suspension fell by 18.9%, suspension working space RMS fell by 1.47%, and the dynamic tire load RMS value decreased by 0.3%. Obviously, ISD suspension significantly improves vehicle ride comfort.
Conclusion
The network synthesis approach can solve an optimum ISD suspension structure from a number of unknown compositions, which is a general solution method.
Sensitivity analysis can determine the fundamental parameters and reduce the workload of model calibration. The quantum genetic algorithm is applied to optimizing parameters of vehicle suspension, and the simulation consequences are profound satisfaction.
ISD suspension effectively inhibits the low-frequency vertical vibration of the vehicle to improve the ride comfort performance. At the same time, steady-state response time of the ISD suspension is short and the overshoot of response output is truncated, with superior dynamic performance.
Footnotes
Academic Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Nature Science Foundation of China (grant no. 51405202) and the Nature Science Foundation of Jiangsu Province (BK20130521).