
Abstract
Snare capture is a capture mode, which mainly relies on three flexible cables to enclose and then latch the target. Regarding the pre-impact phase of snare capture, this article presents a capture strategy for redundant space manipulator with the aim of improving reliability. It contains two steps: the attitude regulation of snare-type end-effector and the optimized control of space manipulator. In the first step, the contact model between grapple shaft and flexible cable is established based on the discrete flexible cable model. And then, with the purpose of reducing the peak value of contact force, a “safe contact region” is designed and the grapple shaft can get into it by regulating the end-effector’s attitude. In the second step, a description of the inertial properties perceived at the end-effector of space manipulator is provided first, and on this basis, the objective functions which aim to reduce the disturbance of the end-effector are established. Thereafter, the configuration of space manipulator is optimized by the null space method for its advantage of not affecting the regulated end-effector attitude. Finally, a simulation is carried out on a 7-degree-of-freedom space manipulator with snare-type end-effector and a target equipped with grapple shaft to prove the effectiveness of the proposed capture strategy.
Introduction
In the past decades, the importance of on-orbit capture operations by a manipulator has been increasing because of the key role it played in space servicing missions, such as payload/satellite deployment, servicing and retrieval, orbital replaceable units (ORUs) manipulation, as well as on-orbit construction and assembly.1,2 End-effector, as the capture mechanism, will directly contact with the target and its performance will have significant impact on capture mission.
Traditional rigid end-effector, like the grippers which have been used in ROTEX 3 and ETS-VII, 4 has advantages of simple structure, convenient control, high stiffness connection, and so on. It is always used for cooperative target capture (the dynamic and configuration parameters of cooperative targets are often known or available). However, it faces two major problems when performing a capture task. First, the capture pose accuracy needs to be very high, which will increase the control difficulty of the whole system. Second, in the process of catching a large-scale space target, the collision impact could be huge, which will lead to a serious damage to the manipulator system and thus reduces its lifetime. 5 To deal with these problems, some new types of end-effectors begin to appear. Flexible tether-net system is proposed for in-cooperative satellite capture, like debris and malfunctioning satellites. The net capture is a kind of surface-to-point capture, and the in-cooperative capture can be easily performed without considering the target configuration and dynamic status. In addition, owing to its large capture distance, the collision between manipulator and target can be avoided effectively. 6 However, due to its complexity of dynamics and control, this type of capture system is still in concept design. Snare capture is another type of capture system, which mainly relies on three flexible cables to achieve flexible capture and rigid latch mechanism to realize high stiffness connection. This capture mode has been commonly used on orbit for capture missions;7–9 however, its secure operation depends greatly on the skill of the operator. In microgravity environment, the capture operation becomes quite complicated, and it can be subject to high risk if improper contact happens.
It is generally known that a whole capture operation can be divided into three specific phases, namely, target chasing control phase, impact phase between the target and robotic hand, and stabilization control phase of tumbling motion. 10 The first phase, also called pre-impact phase, is very important for any capture mission. The first contact between space manipulator and the target will happen at the end of this phase, and if improper capture strategy is implemented, the target may be pushed away. What is worse, both the target and manipulator could suffer damage due to large impact force. For this reason, the minimization of impact force becomes a major challenge during pre-impact phase, and many researchers have made their own contributions.10–13 However, in these literatures, the contact between manipulator and target is simply regarded as a force impulse and the type of end-effector is not considered.
With regard to snare capture, Tan et al. 14 proposed a discrete model of flexible cable based on torsion spring and then established the force and torque static equilibrium equations. The motion of flexible cable can be predicted through the equation, but the contact force has to be known previously. Li et al. 15 regarded the snare capture mechanism as a retractable rigid ring and built the dynamic model by Newton–Euler and hybrid coordinate methods. The physical properties of flexible cable cannot be reflected by this model, and the contact force is also treated as a force impulse. Uyama et al. 16 divided the flexible cable into a number of beam elements, and adjacent beam elements were connected by three tensile springs and three torsion springs. The contact force was solved based on the classical Hertz contact theory. However, this contact force model is insufficient to express the contact condition between flexible cable and the grapple shaft because the cable would not be a perfectly rigid body during penetration due to geometrical deformation. In Sawada et al., 17 Abiko et al., 18 and Yoshinitsu et al., 19 lots of ground experiments were conducted and the data of force and its corresponding bending displacement of flexible cable were collected by force/torque sensor. On this basis, the expression of contact force was approximated by a quadratic function or other empirical equations. Meanwhile, the disturbance to the manipulator was evaluated by a dynamic simulator. There are few literatures researching on the strategy of snare capture. Takahashi 20 designed an impedance control method for a flexible joint manipulator with snare-type end-effector. It can make the flexible cable keep contact with the floating target during the whole capture process and thus reduce the possibility of pushing the target away. Pan 21 proposed a FA-SC-VT (fast-approach slow-contact velocity track) capture strategy, which mainly relies on slowing down the relative velocity to reduce the contact force, and a similar capture strategy based on Loop/Contact model can also been in Tan et al. 22
In this article, regarding the pre-impact phase, a two-step capture strategy for redundant space manipulator when performing snare capture is proposed. The attitude of the snare-type end-effector is regulated in the first step, which aims to reduce the peak value of contact force between the grapple shaft and flexible cable. And in the second step, the configuration of space manipulator is optimized to reduce the end-effector pose disturbance from impact. Through the null space method, the self-adjustment of manipulator configuration in the second step will not affect the regulated end-effector attitude in the first step. The reliability of space snare capture can be improved by the proposed method.
Problem description
Working mechanism
Snare capture mechanism mainly consists of snare, rigid, and latch subsystem. The function of snare subsystem is to capture the grapple shaft and restrict its movement in space. It is mounted on the supporting shell and comprises a stationary ring, a rotary ring, and three flexible cables each having one end secured to the stationary ring and the other end secured to the rotary ring. When the grapple shaft gets into the region formed by three flexible cables, the rotary ring begins to rotate with respect to the stationary ring to enclose and then latch the target. The specific process is as follows:8,20
The snare-type end-effector approaches the grapple shaft to make it into the enclosed area formed by three flexible cables.
After the grapple shaft is inserted, the rotary ring rotates to narrow the enclosed region until the flexible cables are fully tightened. And during the capture process, the grapple shaft may contact several times with three flexible cables.
The grapple shaft is then dragged into the cylinder of the end-effector by the cables, and it is latched when the end-effector and the grapple shaft fully contact. The whole process of snare capture is shown in Figure 1.
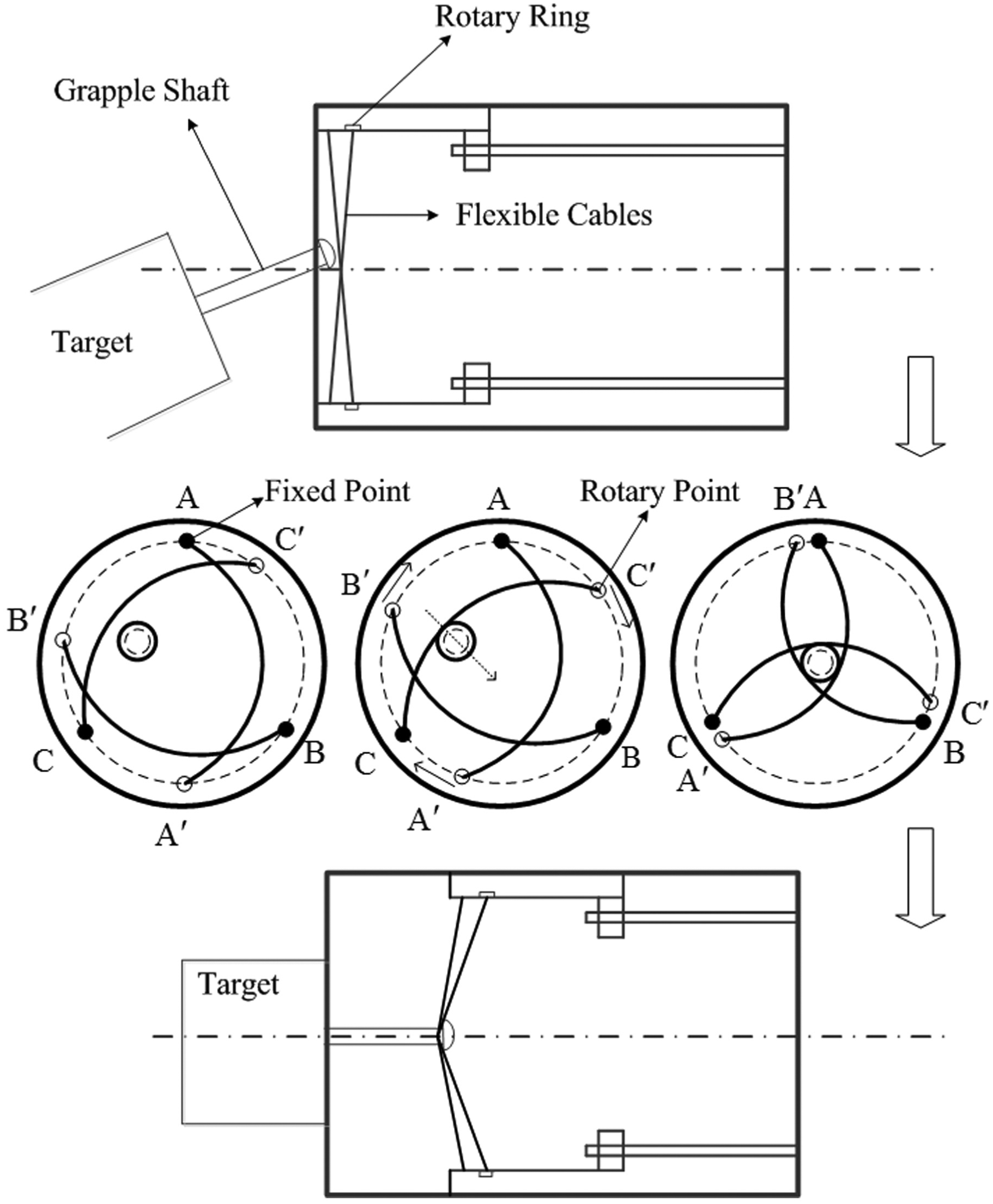
The process of snare capture.
Capture strategy
In microgravity environment, snare capture operation would face two major risks. Risk 1: if the contact force is too large, the target may be pushed away and both the target and manipulator could suffer damage. Risk 2: if the pose of the end-effector is disturbed too much from impact, the capture process would become very unstable, and the target may be out of the enclosed region after the first contact. In order to improve the reliability of snare capture, the way of first contact between grapple shaft and flexible cable should be optimized and a two-step capture strategy is proposed as shown in Figure 2:
Step 1. The attitude of the end-effector is regulated to make the plane formed by three flexible cables perpendicular to the grapple shaft, which will ensure the contact force lie in the plane as much as possible. Thereafter, the end-effector is rotated to adjust the contact point between grapple shaft and flexible cable to reduce the peak value of contact force.
Step 2. The configuration of space manipulator is optimized to reduce the disturbance of the end-effector from impact. It is worth noting that the optimized control in this step should not affect the regulated attitude of the end-effector in the first step.

Two-step capture strategy in the pre-impact phase of snare capture.
Contact model between grapple shaft and flexible cable
The snare capture mainly relies on three flexible cables to contact and enclose the grapple shaft; therefore, the contact problem during snare capture is actually the contact modeling problem between grapple shaft and flexible cable.
Discrete model of flexible cable
The flexible cable is assumed to be a series of point masses
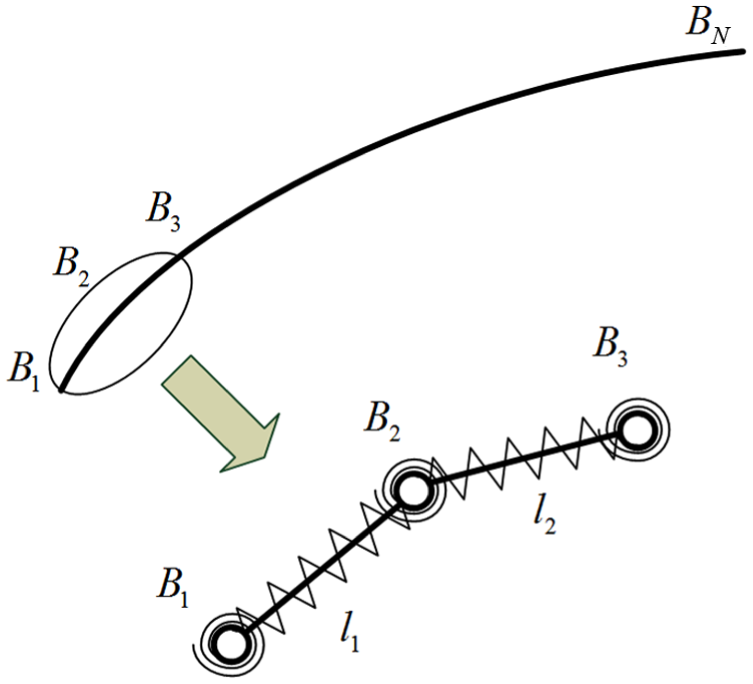
The discrete model of flexible cable.
Contact assumption
The contact between grapple shaft and flexible cable is a very complex process, and the exact contact model is very hard to be established. Here, we make some assumptions below:
The contact force only acts on the node; actually, if the number of nodes is large enough, this could be realized.
The relative velocity between grapple shaft and flexible cable is low enough. And based on this, we assume that the velocity-dependent term does not make any contribution to the force equilibrium equation.
Considering the small deformation caused by contact, the contact force direction keeps the same during the contact process and only single point contact happens.
Assume that the contact happens on node n of flexible cable, and the force condition is shown in Figure 4.
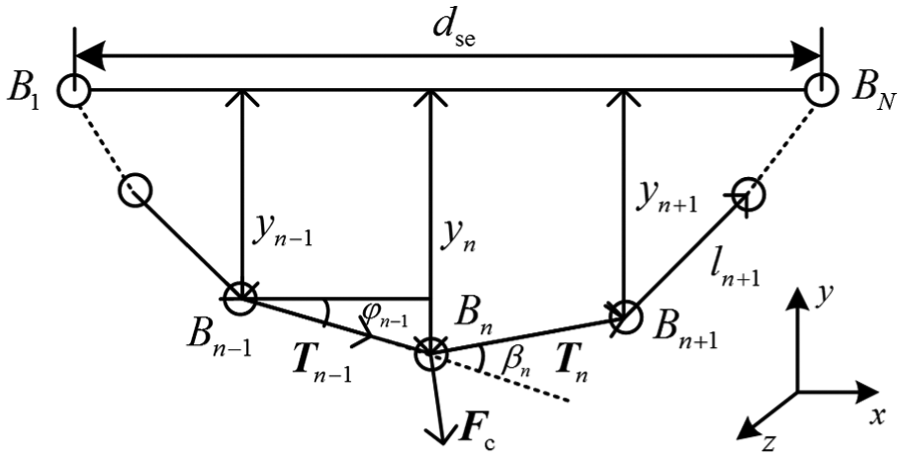
Force condition of node n.
The static force equilibrium equations for node

where
The magnitude of moment

where

The equivalent structural forces of
And they satisfy the following conditions


where

As equation (1) can be decomposed into two sets of scalar equations in x and y directions,

where
As shown in Figure 6, considering the geometric constraints and initial state, we determine a reasonable range for

The determination of start-end distance of flexible cable.
Define the penetration
The initial ranges for
A set of start-end distances

where
Based on the contact assumptions, the velocity-dependent term is not considered. The dynamic contact process can be simplified as a static one in each step. And thus, the normal contact force can be calculated using equation (7) during snare capture when the penetration
So far, the normal contact force model has been established, and the friction force can be calculated by the Coulomb friction model

The definition of penetration.
Strategy for space snare capture
The regulation of end-effector attitude
First, the attitude of the end-effector is regulated to make the plane formed by three flexible cables perpendicular to the grapple shaft, which will ensure the contact force lie in the plane as much as possible. It is obvious that this step will greatly reduce the possibility of pushing the target out of the enclosed region after the first contact. Second, the end-effector is rotated to adjust the contact point between grapple shaft and flexible cable to reduce the peak value of contact force. This step is worth analyzing, which is detailed in the following.
In order to express more clearly, the contact characteristics between grapple shaft and flexible cable are analyzed by the simulation below. Without loss of generality, set the target mass

The peak value of contact force corresponding to the nodes.
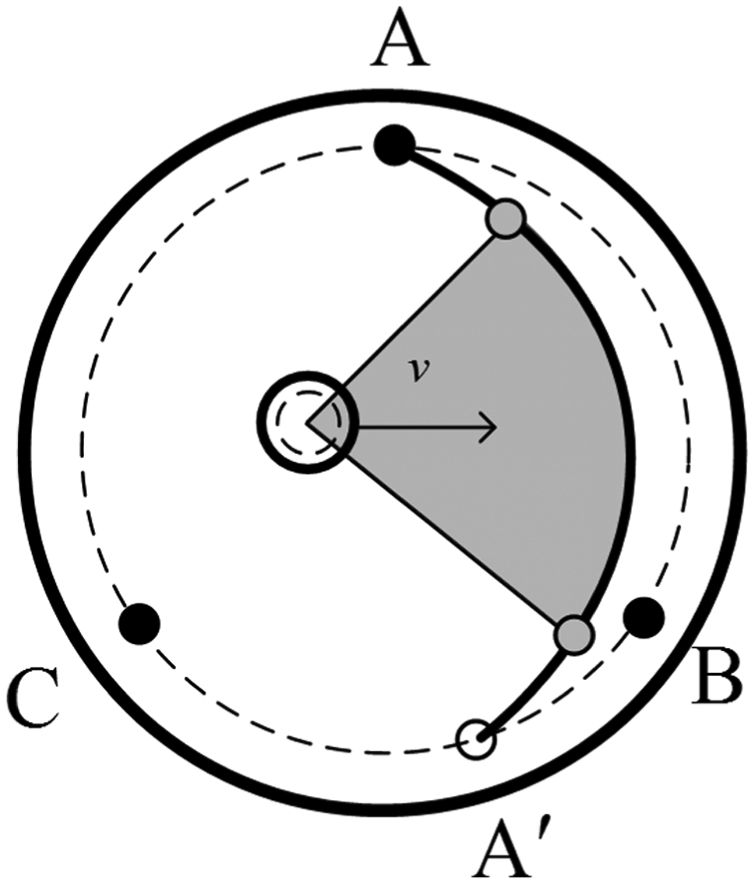
The grapple shaft in “safe contact region.”
It is worth noting that stiffness coefficients of flexible cable are affected by many cable parameters, like the structure, the length, and the material, and even if for the same flexible cable, its stiffness coefficients will also change with some external factors. 25 However, the method proposed is applicable to any flexible cable with tension and bending resistance properties. For the cables with different stiffness coefficients, they all have the similar properties as shown in Figure 8. The only difference is the range of “safe contact region” according to different task requirements.
The optimized control of space manipulator
The inertial properties perceived at the end-effector
In order to improve the reliability of capture, the pose of the end-effector should not be disturbed too much during the contact process. Therefore, the inertial properties perceived at the end-effector of space manipulator are studied first. The dynamic equation of a free-floating space manipulator is generally expressed in the following form 13

where
For a free-floating space manipulator,

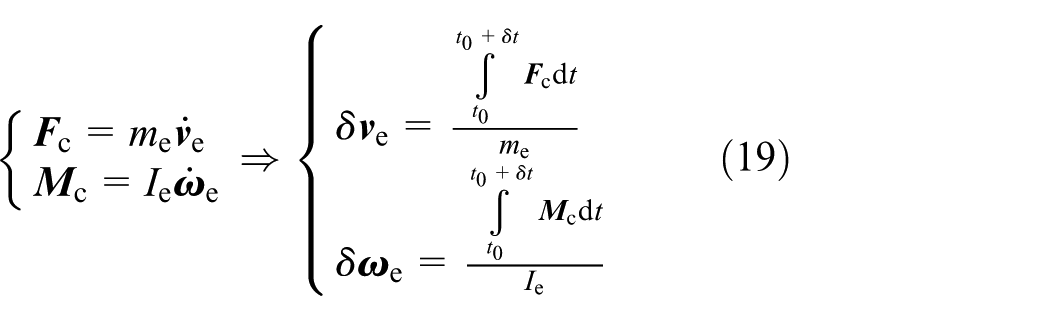
Multiply both sides of the first equation of equation (9) by the inverse of

Substituting equation (10) into the second equation of equation (9), the base acceleration

where
Assume that the initial momentum and angular momentum are zero, the kinematic relationship of space manipulator in velocity level is

where

Meanwhile, the relationship between joint torques and operational forces for redundant manipulator is

where

Substituting equation (15) into equation (14), we can get the dynamically consistent relationship between joint torques and the end-effector operational forces for redundant space manipulator. It provides a decomposition of joint torques into two dynamically decoupled control vectors: joint torques corresponding to forces acting at the end-effector and joint torques that only affect internal motions. Substituting equations (12), (13), and (14) into equation (11), we can get the dynamic equation expressed in operational space

where
So far, the dynamic behavior of the end-effector can be described by equation (16), and its inertial properties can be calculated by virtue of the positive definite matrix
For the translational task, the Jacobian matrix

where

where
Through the analysis of the inertial properties perceived at the end-effector, in some way, the space manipulator can be regarded as a single body from the perspective of the end-effector. Thus, the following equation can be established when contact happens
where
As the flexible cable is installed on the end-effector, the contact force produced at the flexible cable will transmit to the end-effector. Due to the short duration of contact, the end-effector’s pose could be assumed still during this period. Based on this assumption, the contact force impulse and the impulsive moment are only relevant to the flexible cable and independent of the end-effector’s inertial properties. Therefore, in order to reduce the disturbance of end-effector pose from impact, the mass/inertia property perceived at the end-effector should be as large as possible along/about the direction of contact force/moment. And we design the objective functions as follows

Optimized control based on null space
Non-minimum-norm solutions to equation (12) based on Jacobian pseudoinverse can be written in the general form

where

where

Through equation (23), the configuration of space manipulator will be optimized until the values of objective functions do not change any more. And during the whole optimized control process, the pose of the end-effector will not be disturbed.
Simulation
In this simulation, the proposed capture strategy is applied on a 7-degree-of-freedom (DOF) free-floating space manipulator with snare-type end-effector. Its joint frames according to Denavit–Hartenberg (DH) method are shown in Figure 10, where

A 7-DOF free-floating space manipulator with snare-type end-effector.
DH parameters of space manipulator.

Dynamic parameters of space manipulator.

The relevant parameters of the snare-type end-effector are set the same as above. The target, whose mass is 20 kg and inertia matrix is

The coefficients of contact force function.

Set
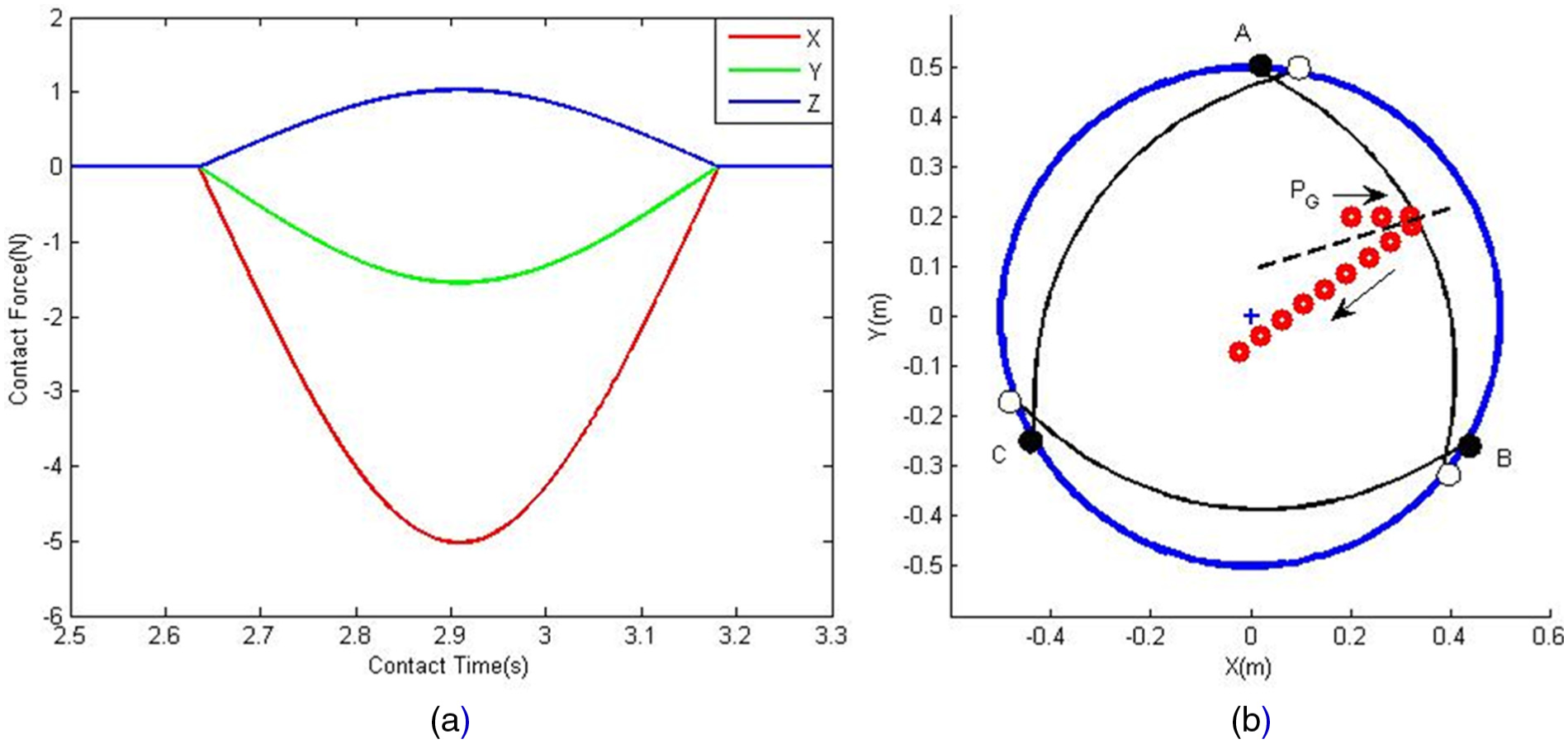
The first contact between flexible cable and grapple shaft: (a) the contact force applied on the target and (b) the contact process.
Assume that the regulated pose of the end-effector is

The changes of joint angles.

The values of objective function
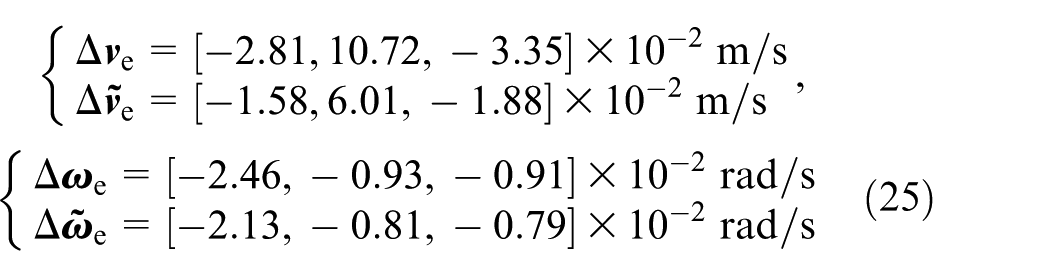
Equation (25) describes the variations of end-effector velocity due to the impact before and after optimized control, which are represented by
The whole optimized control process can be seen in Figure 14, the red configuration is the final optimized configuration, and we can see that the pose of the end-effector is not disturbed during the control process.
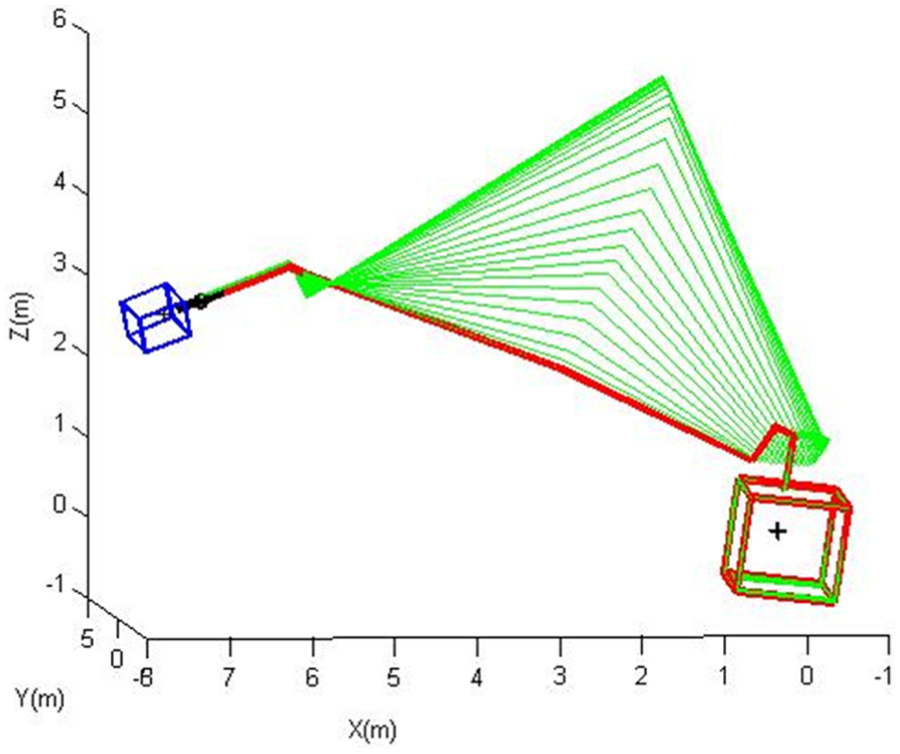
The whole optimized control process.
Conclusion
Snare capture performed by a manipulator is becoming more and more popular for its large tolerance and high stiffness connection for space payload operations. In order to improve the reliability, a two-step capture strategy for redundant space manipulator is proposed regarding the pre-impact phase. From the simulation results, we can see that the peak value of contact force can be greatly reduced when the grapple shaft gets into the “safe contact region,” and with the purpose of reducing the disturbance to the end-effector, the inertial properties perceived at the end-effector are optimized by adjusting the manipulator configuration. The simulation results prove the effectiveness of the proposed snare capture strategy. The potential application of our work is to predict the contact process and reduce the risks during snare capture.
The contributions include that the determination of “safe contact region,” the calculation of contact force, and the reduction of end-effector pose disturbance are applicable to the target with any initial conditions as long as we know the dynamic parameters and the relative velocity between the target and the contact point of flexible cable. However, the capture strategy proposed is more applicable to the cooperative target, especially the one with attitude under control. Regarding the tumbling target, how to make the grapple shaft insert into the capture region is still a challenge.
Footnotes
Acknowledgements
The authors thank the anonymous reviewers for their critical and constructive review of the manuscript.
Academic Editor: Crinela Pislaru
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the National Basic Research Program of China (Grant number 2013CB733000), the National Natural Science Foundation of China (Grant number 61573058), and BUPT Excellent Ph.D. Students Foundation (Grant number CX2015301).