
Abstract
Nowadays, container shipment in the intermodal terminals is overloaded. The quay crane and its control system have to be properly prepared for rapid cargo reloading. The advanced control system may increase container loading efficiency due to the reduced transportation time. However, faster transportation demands higher safety. In this article, the authors performed multibody dynamics simulation of the container spreader and lifting mechanism by analyzing more advanced mathematical model of the quay crane. Trolley motion and cargo swing angle transient responses of the dynamic system were acquired and analyzed during model simulation. The main target of this research is to determine the system behavior during transients. The simulation results showed that the transients induced by startup of the vertical spreader travel affect the whole crane system in all the investigated cases. In addition, the influence of flexible cable causes additional oscillations of cargo and reciprocating trolley displacement. The simulation of the container spreader and lifting mechanism will help detect motion deviations of the quay crane in real time.
General introduction
Risk of cargo transportation process and impact of crane restrictions
Every year, container shipment is increasing and the container terminals get loaded more. Because of this situation, the terminals must load more containers using the same transportation equipment. One of the most important aspects of cargo loading is operation safety which can decrease in overloaded terminals.1–3 In order to ensure safety of the container during transportation, an optimal operational strategy4,5 of a quay crane control has to be ensured. In addition, the restrictions and limitations of the intermodal quay crane have to be appropriately assessed performing numerical simulations of multibody dynamics and the transient processes.
One of the most researched cargo damage reasons in the past years is container swinging.2,6,7 The main cause of the container and spreader swinging is the flexible steel cable connection between the spreader and trolley of the quay crane. 8 The container can produce swinging motion because of different container weights, wind gusts, and human actions. As a result, more time is required for the container shipment from point A to point B due to the container swinging reduction process. Moreover, due to unstable crane motions, there is a probability that the container can be damaged if the collision with the quay crane structures occurs. Because of high safety risks, the container crane operation mostly is suspended during strong winds.
The numerical simulations of multibody system dynamics enable to apply limitations for better investigation of container sway reasons. Therefore, applying a common set of limitations to all cranes would not be efficient. Most of the container terminals use quay cranes with specifications depending on their loading demands. Some of the main technical limitations of the quay crane are hoisting capacity, hoisting speeds of the spreader, trolley traveling speed, gantry traveling speed, traveling distances, boom hoisting time, wind speed, and power supply. 9
The most active recent research area is modeling of crane dynamics to increase cargo safety. The main target of such research is to determine the system behavior in different conditions.9–11 A dynamic model of a three-dimensional (3D) overhead gantry crane system motion is proposed by Ismail et al. 10 The Lagrangian method is used for calculations. The trolley position and swing angle responses of the dynamic system have been acquired and analyzed during system simulation. These results are suitable for the development of effective control algorithms for a double-pendulum gantry crane system. Jaafar et al. 9 presented the development of nonlinear gantry crane system model, and the factors affecting the performance in terms of input voltage, cable length, payload mass, and trolley mass were investigated. The simulation results had shown that system response is very sensitive to the variation in the parameters. This is the main reason for container swinging and safety issues. The results of this research are very beneficial for the development of control algorithms.
Most of the models related to dynamic control and safety problems represent only one side of the problem, such as a crane control system with a state simulator. For example, in Tomczyk et al., 12 a dynamic model for solving problems of load operation and positioning under different wind disturbances is developed. Cha et al. 13 investigated problems involving floating crane and the dynamics model was developed to simulate the motion of the heavy cargo.
The most recent research results by Wu et al., 14 and Qian et al., 15 which addresses container sway problem, provide solutions related to the design of control algorithms dedicated to compensate or minimize the sway movement of the container. The presented solutions give positive results, although not all the container sway reasons were estimated. Therefore, by additionally estimating more reasons of container sway, these control algorithms could be made more efficient.
In this article, the dynamic model of a quay crane container spreader and lifting mechanism is presented. The proposed multibody system could also be used as a tool for solving multiple problems, such as wind disturbances, transportation trajectory, and predictive control. The developed multibody numerical model of a quay crane spreader and lifting mechanism is based on real quay crane (Figure 1) mechanical structure.

Quay crane in port of Rotterdam.
According to the analysis of the other research, the more sophisticated and accurate model is presented, which evaluates additional factors such as motor-induced vibrations, eight flexible cable system, transmission, and pulleys. The model is used for estimating the dynamics of the crane container spreader. It was developed using the parameters of manufactured prototype size, motor performance, lifting power, and so on. In addition, the authors developed motion equations of the crane systems and defined the initial parameters for system simulation. So in the next section, a dynamic model of container spreader dynamics and lifting mechanism is proposed.
Mathematical model and dynamics of container spreader transients
Before the development of better algorithm, a new mathematical model of the crane spreader and real quay crane prototype was created (Figure 2). The model will provide theoretical data about spreader status. The vibrations and their sources in the crane spreader and lifting mechanism were evaluated and provided additional information for new mathematical model for the crane (Figure 3). The mathematical model (Figure 3) marked “Part C” (trolley with lifting mechanism) and “Part D” (container spreader) is the same like in prototype (Figure 2).

Scaled prototype of intermodal quay crane: (a) virtual prototype and (b) physical prototype.

Dynamic model of quay crane spreader and lifting mechanism.
Most attention is paid to motor vibrations and cable tensions. Because of very long cables in cranes, additional container swinging can appear. Mostly, it is caused by the weather conditions and wrong algorithms for operating devices. The best solution for this problem is adding additional sensors, such as, in our case, an accelerometer. The sensor’s data could be used for containers’ position estimation, detection, and reduction in container swinging. This could increase transportation security. Combined algorithm generator and real-time sensor data will provide the best algorithm for a particular kind of cargo that is stored in the container. In addition, it will allow adjusting algorithm in real time, if the weather conditions change or some unexpected situation appears (uneven control, shift of the cargo in the container, crane swinging due to the wind, etc.).
The developed model of the quay crane spreader and lifting mechanism is based on several assumptions. First, all bodies in the model are considered as solid bodies that cannot be deformed. The physical and mechanical properties of all the cables (such as stretching of cables while carrying heavy cargo) were assumed and estimated and their mathematical models are included in equations. Additionally, the electro-mechanical transient processes of electric motors and imperfections of trolley path were estimated.
For better container transportation problem solution, the new mathematical model was used for the container spreader and lifting mechanism, which will help to evaluate the situation. Torque mathematical equation of first electrical asynchronous motor with gear

Here,

Here,

Here,

Here,

Here

Using equations (5) and (6), the variations in mechanical work can be calculated as

Here,


The cable tension force is

Here,

Here,

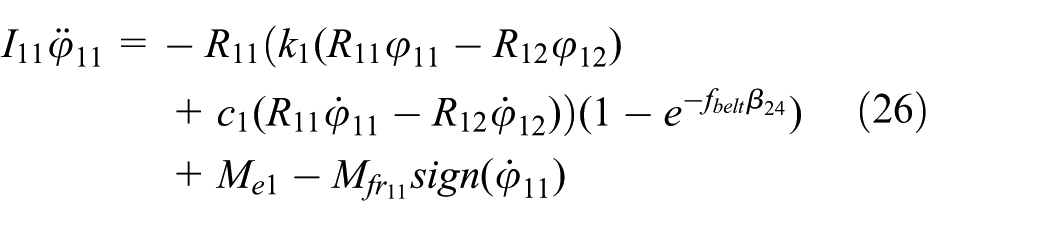
Equations of motions
System of motion equations for the first body (crane without load)



Here,
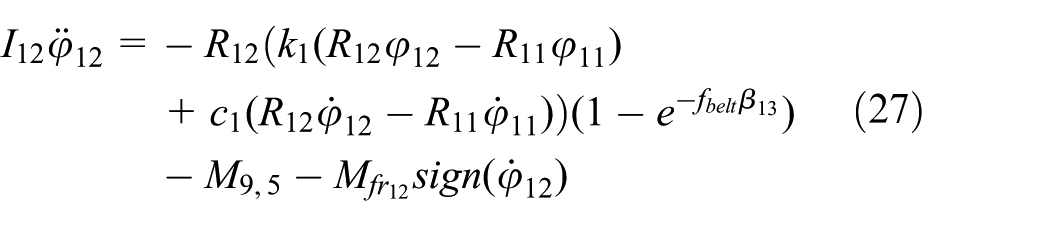
System of motion equations for the second body (spreader with the container)




Here,


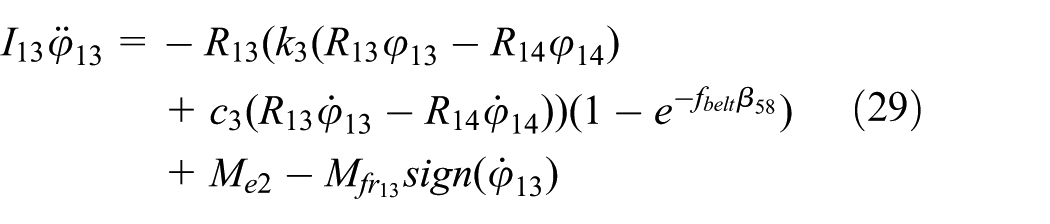
System of motion equations for the third and fourth bodies and the third asynchronous motor torque (trolley motion equations)



Here,
System of motion equations for lifting mechanism




where
System of equations for generalized forces of the fifth cable




















Here,
System of equations for generalized forces of the sixth, seventh, and eighth cables using system of equations (32)



Moments applied on the first and second bodies

Here,

Here,
Equations of air resistances of the first and second bodies


where

Here,


In the next section, the results of multibody dynamic simulation are presented.
Simulation results and discussions
The simulation of the container spreader and lifting mechanism will help detect motion deviations of the quay crane in real time. The mathematical model was developed for scaled quay crane prototype as shown in the previous section. Any crane’s control algorithm optimization was not included in the simulation. In the mathematical experiment, the vibrations were simulated during the transient processes. The main target of the simulation was to calculate the influence of the transient processes for quay crane model. The cargo lifting process was simulated for the first and second motors.
The initial values of the model parameters used for the mathematical experiment are presented in Table 1. The duration of simulation was 10 s, but the transient motions stabilize after about 2 s and most of the represented results are in this time period.
Initial values and model parameters used for the mathematical experiment.

The graphs of the angular velocity of the first and second motors with the pulleys are presented in Figure 4. This is a standard transient process of the asynchronous motor. The transient processes of both the motors last for 0.2 s as shown in Figure 4. The motor’s pulley’s transient lasts longer—about 1.0 s. These simulation results show that both the motors in the crane system work similar.

Angular velocities of motor and pulley: (a) first motor with pulley and (b) second motor with pulley.
The motors also have an impact on the cargo lifting speed due to the transient processes. As shown in Figure 5, high-amplitude vibrations affect the vertical velocities of cargo lifting. These vibrations last longer than motor transient process, because the container is suspended and the cables are tensioned by cargo weight. As shown in Figure 5, the transient process lasts about 1.4 s.

Vertical velocities of cargo lifting.
The cargo displacements are shown in Figure 6. There are two components (coordinates by Y- and Z-axis) of vector

Cargo horizontal (by Y-axis) and vertical (by Z-axis) displacements.
In Figure 7, the angular velocities of the pulleys of the spreader are presented. Both the pulleys rotate at the same speed but in opposite direction. The right pulley rotates clockwise and left anticlockwise. During the lifting process, both the pulleys rotate at low angular velocities and the transient process lasts about 1.4 s. As it is shown in Figure 8, after the transient behavior of the rotating pulleys, the angular velocity is about 0.01 rad/s. The pulleys on the spreader are affected by friction. This leads to excessive vibrations during the transient. The simulation results presented in Figures 6 and 7 show even lift of the cargo.

Velocities of left and right rotating pulleys on spreader.

Trolley vibrations: (a) horizontal velocity of trolley, (b) phase space diagram of reciprocating motion horizontal displacement, and (c) vertical velocity of trolley, and (d) phase space diagram of reciprocating motion vertical displacement.
During the simulation of container lifting, the motors’ transient processes affect the whole crane system. This influence is presented in Figure 8. Although the trolley is stationary, the transient process spreads vibration to all axes. In Figure 8(a) and (c), the horizontal and vertical trolley velocities are shown. This transient process lasts about 1.5 s and after the transient behavior, the velocity becomes equal to 0 (stabilizes dynamic balance of the trolley). In Figure 8(b) and (d) the phase space diagrams of the reciprocating motion of the horizontal and vertical displacements are presented. These phase space diagrams show the maximum displacements of the trolley, minimal, and maximal velocities. Also, the dynamic balance of the trolley stabilizes and the displacement becomes equal to 0. It happens because a cargo is lifted at a constant speed.
The performed multibody dynamics simulation of the container spreader and lifting mechanism shows that vibrations affect the whole system. Typical transient of asynchronous motor caused vibrations during system startup.16,17 These vibrations induced by motors show that the developed dynamics model and its simulation results can be applied to future research to solve predictive control problems.
Conclusion
In this article, a multibody, more accurate mathematical model was designed to investigate the transients of the quay crane trolley and spreader on the quay crane system startup. The dynamics simulation was performed for the vertical crane spreader travel to imitate the container vertical motion and its influence for cargo sway and trolley displacements when the trolley motor is not running. The simulation results were obtained and investigated. According to the simulation results, in all the cases, the transients induced by startup of the vertical spreader travel affect the whole crane system. Due to the influence of flexible cable, lifting of the spreader causes oscillations which results in additional sway of cargo and reciprocating trolley displacement. These transient processes affect the whole system of the crane and last from 0.2 s at motors to 1.4 s at rotating pulleys on the spreader because the mathematical model includes flexible cables. The pulley–flexible cable system prolongs transients approximately seven times. The maximum vertical displacement (
The developed mathematical model of the intermodal crane spreader can be used for real size crane transportation process imitation, but some parameters have to be adjusted. In addition, this mathematical model could be improved by adding additional functions and used as tool for crane control algorithm verification and detection of weak points in similar systems. This will help to improve safety in cargo transportation process by including transient-induced vibration information to quay crane control algorithm as container additional sway compensator.
Footnotes
Acknowledgements
Author Marijonas Bogdevicius is also affiliated with Marine Science and Technology Centre, Klaipeda University, Klaipeda, Lithuania.
Academic Editor: Crinela Pislaru
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.