
Abstract
Less degrees of freedom parallel mechanism is widely used in many fields with its unique advantages. A decoupled parallel mechanism with 2 degree-of-freedom translation and 1 degree-of-freedom rotation is presented, and its performance evaluation indices analysis is performed. By the constraint screw method, the motion feature of the mechanism and its number of degree of freedom are analyzed. The constrained equations of the mechanism are established according to the constrained conditions of the pole length. The analytical expression of the forward and inverse position for the mechanism is deduced, and the expression of the Jacobian matrix is derived, which validated the decoupling feature of the mechanism. The singularity of the mechanism is also carried out. The performance evaluation indices for the decoupled parallel mechanism are discussed and the corresponding performance indices analysis of the proposed decoupled parallel mechanism is executed. The novel decoupled parallel mechanism presented herein enriches the parallel mechanism structure, and the definition and analysis of the performance evaluation indices should be meaningful for the further design and optimization of the decoupled parallel mechanism.
Introduction
Compared with the serial mechanism, the parallel mechanism attracts attention of many scholars widely with its special characteristics such as higher stiffness, better payload capability, smaller accumulated error, and more compact structure. While for the task that does not need 6-degree-of-freedom (6-DOF), the limited-DOF parallel mechanism 1 is more suitable owing to the advantages of simple mechanical structure, low manufacturing costs, and easy development of the control system.
Since the movement of the moving platform is restrained, the limited-DOF parallel mechanism shows some special properties. Clavel 2 proposed the DELTA Robot consisting of spherical four-bar linkage. Gosselin et al. 3 presented a 3-RRR (R denotes the revolute pair) planar parallel mechanism with two translations and one rotation. Lower-mobility parallel mechanisms were relatively systematic synthesized using constraint screw method by Li. 4 A 4-DOF parallel mechanism with fully symmetrical structure that can perform three-dimensional translation and one rotation was proposed by Zhao et al. 5 Yang et al. 6 also designed some 3-DOF translational parallel robots adopting the units of single-opened-chain limb. A new 3CCC (C denotes the cylindrical pair) parallel mechanism was designed by Gan et al. 7 based on geometry analysis, and both the inverse and forward kinematics of the 3CCC parallel mechanism were proposed.
In the research of parallel mechanism, the existence of strong coupling restricts its progress and causes the control system more complex. However, the decoupled parallel mechanism with one-to-one among input and output possesses apparent advantages, such as better isotropy, higher motion accuracy, and simpler control, which has extensive application prospects in the robot fields. 8
The two translational and one rotational decoupled parallel mechanism, which combined with the rotation and the translation, has special function in the condition of the vibratory screening, Chinese massage, the ankle rehabilitation, and so on. 9 Gogu10,11 performed the synthesis of the singularity-free fully isotropic planar parallel manipulators with 3-DOF via the theory of linear transformation, and since then a family of T2R1-type (T and R denote the translational and rotational degree of freedom, respectively) parallel manipulators with bifurcated planar-spatial motion of the moving platform was also presented. Liu et al. 12 put forward a family of spatial 3-DOF fully parallel manipulators with high rotational capability. Zhang and colleagues13,14 presented 24 types of uncoupled parallel mechanism solutions and then discussed the structure size condition of a 3-DOF uncoupled spatial parallel manipulator of which the condition number of the Jacobian matrix equals to one identically.
For the design and performance analysis of the mechanism, performance evaluation is the first condition to be considered. At present, performance evaluation indices research on the parallel robot mechanism mainly focus on the workspace,15,16 singularity configuration, decoupling, isotropy, velocity, bearing capacity, stiffness, and precision.17,18
Most performance evaluation indices concern with Jacobian matrix of the mechanism, while Jacobian matrix depends on the pose of the mechanism and is not a constant matrix. Therefore, the condition number 19 varies with different configurations of the mechanism and is inconvenient to evaluate the performance of the mechanism. Gosselin and Angeles 20 proposed a global performance index for the kinematic optimization of the robot manipulators to evaluate the performance of the mechanism as a whole. Shi et al. 21 presented a global performance fluctuating index and used the integrated global performance index as the objective function to optimize the dimensions of robotic manipulators.
So far, various decoupled parallel mechanisms have been synthesized, while the corresponding performance evaluation index for the decoupled parallel mechanism is not even less. While for the decoupled parallel mechanism, its Jacobian matrix is a diagonal matrix, which is not suitable for most of the existing performance indices. The decoupling nature is regarded as one performance of the parallel mechanism. 22 While it is a difficult and challenging task for the definition of the performance evaluation index of the parallel mechanism which possess clear physical meaning, it is easy to calculate and can fully reflect the comprehensive performance.
So far, in the study of 3-DOF decoupled parallel mechanisms, comparatively systematic work mainly focus on the three translations decoupled parallel mechanism, while the research on the two translational and one rotational decoupled parallel mechanism is still lack of report.
Therefore, in this article, a novel 2CRR+RRRR 3-DOF decoupled parallel mechanism is presented, and its characteristics is analyzed as well. First, the structural composition of the mechanism is addressed. The number of DOF and the motion feature of the proposed mechanism are analyzed using the constraint screw method and modified Kutzbach–Grübler criterion. Then, the forward and the inverse kinematic problems are performed, and the Jacobian matrix of the mechanism is derived, which also validated the decoupling feature of the mechanism. The singularity of the mechanism is analyzed. Finally, the performance indices of the decoupled parallel mechanism are preliminary defined from the physical significance of the diagonal element of the Jacobian matrix, and the corresponding performance indices of the proposed mechanism are discussed.
Structural composition and characteristics of the 2CRR+RRRR parallel mechanism
Description of the 2CRR+RRRR parallel mechanism
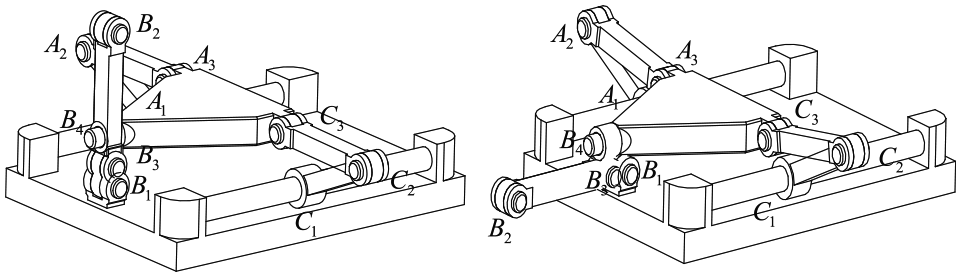
Figure 1 shows the structural composition of the 2CRR+RRRR parallel mechanism. 23 It can be seen that the mechanism is composed of a moving platform, a fixed base, and three limbs which connect the moving platform and the fixed base. The first limb and the third limb have the same structural composition, which are composed of one cylindrical pair (C) and two revolute pairs (R). And all the axes of the kinematic pairs are parallel to each other and also parallel to the plane of the fixed base. The second limb has four revolute pairs from the base to the platform in sequence, in which the axis of the revolute pair mounted on the fixed base is directly parallel to the plane of the fixed base, and the axes of the other three revolute pairs are parallel to each other and perpendicular to the first one. The kinematic pairs connected with the fixed base in the three limbs are selected as the actuated joints of the mechanism. In detail, the movement of the cylindrical pair in the first limb, the rotation of the revolute pair connecting with the fixed base in the second limb, and the rotation of the cylindrical pair in the third limb are chosen as the actuated inputs of the parallel mechanism. What should be mentioned is that the axes of the three actuated pairs are parallel to each other. If the axes of the three actuated pairs are not parallel to each other, the rotation condition 24 will not be satisfied and then the rotational degree of freedom of the mechanism will be disabled.

Structural composition of the 2CRR+RRRR parallel mechanism.
DOF analysis of the 2CRR+RRRR parallel mechanism
As shown in Figure 2, the upper part of the 2CRR+RRRR mechanism is the moving platform which appears as a regular triangle, and the lower part is the fixed base which is a square

Screw system of the 2CRR+RRRR parallel mechanism.
Since the structure and spatial composition of the first limb is identical to that of the third limb, the third limb is taken an example to be analyzed as well for simplicity consideration. The original points of the coordinate systems
According to screw theory,
25
the motion screw system of the third limb, which are described in the coordinate system
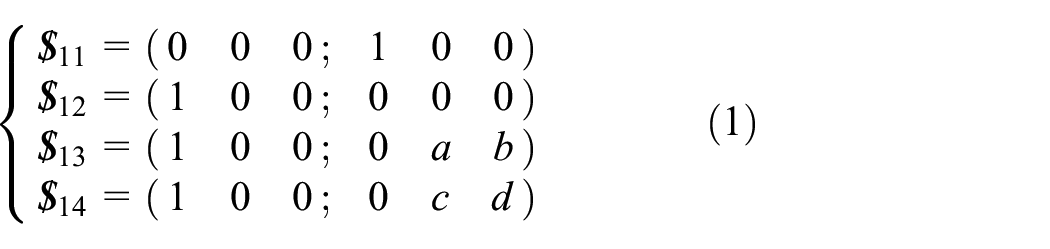
where a, b, c, and d are all real numbers and different from one another.
The reciprocal screws, which are also described in the limb coordinate system, indicate the constraint of the limb on the moving platform of the mechanism. The reciprocal screw of the screw system expressed in equation (1) can be solved as

It can be seen that
The motion screw system of the second limb, which are described in the coordinate system

where e, f, g, h, i, and j are all real numbers and different from one another.
Similarly, the reciprocal screw of the screw system expressed in equation (3) is

It can be seen that
From the above analysis, it can be concluded that the mechanism has 3 DOF, that is, two translations along the directions of X-axis and Z-axis and one rotation around X-axis. Simultaneously, the rotation of the moving platform around Z-axis is all constrained by the three limbs of the 2CRR+RRRR parallel mechanism, which means there is a common constraint, and the rotation of the moving platform around Y-axis is constrained by the first and third limbs of the 2CRR+RRRR parallel mechanism, which means there is also a redundant constraint.
When the moving platform rotates a certain angle around X-axis, the mechanism will be not at initial pose, then the motion screw system of the second limb will change, but the reciprocal screw still are a constraint couple and a constraint force, which only their directions are different from that former and has no influence on the freedom of the mechanism.
By the modified Kutzbach–Grübler criterion, 25 the DOF of the 2CRR+RRRR parallel mechanism can be solved as

where M is the DOF of the mechanism, d is the order of the mechanism, and
Position analysis of the 2CRR+RRRR parallel mechanism
As shown in Figure 3, the mechanism is at the initial pose, and symbols are defined as follows:

Schematic diagram of the 2CRR+RRRR parallel mechanism.
Inverse kinematics of the parallel mechanism
The inverse kinematics of the mechanism is to determine the input parameters
Referring to Figure 3, according to the limb arrangement and the relationships between the kinematic pairs, it can be seen that the translational output along X-axis


The position vector of the point

where
According to the geometrical relationship of the 2CRR+RRRR parallel mechanism, the following equation can be obtained as

From equation (6) and substituting equation (8) into equation (9)

Expanding equation (10), it can be obtained as
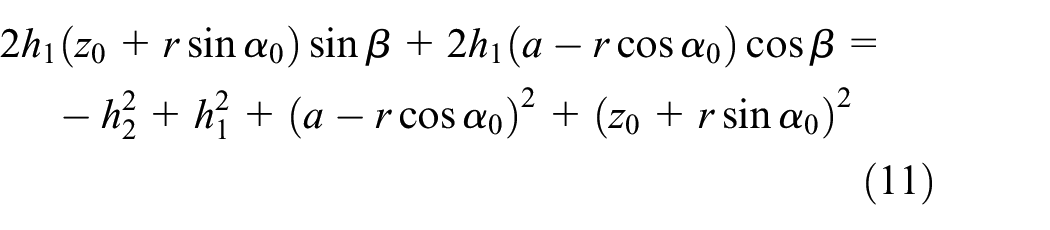
Then, the following equation can be obtained as

where
Then, the input parameters of the mechanism
Direct kinematics of the parallel mechanism
The direct kinematics of the mechanism is to determine the pose of the moving platform



Kinematic analysis of the 2CRR+RRRR parallel mechanism
Velocity analysis of the parallel mechanism
The velocity expression between the moving platform and the driven joints can be expressed as follows

where
Taking a derivative for equations (13)–(15) with respect to time t, the relationship between the input velocity and the output velocity of the mechanism can be written as

where


From equation (17), it can be seen obviously that the Jacobian matrix
Singularity analysis of the parallel mechanism
If the manipulator is in singular configurations, the moving platform of the parallel mechanism will reach some special status, such as the limit point, the dead center, or the movement out of control, sometimes even the DOF changes. The conditions discussed above will possibly break up the stress state, lead to a loss of the original controllability, or even destroy the mechanism and so on. Thus, the singularity analysis is essential for the design and control of the parallel robot mechanism.
Generally, the singularity analysis of parallel mechanism mainly focused on searching the solutions with Jacobian matrix. Zhao et al. 27 proposed a method to analyze the singularity of spatial parallel manipulator by investigating the terminal constraints of its kinematic chains, which not only avoids solving the Jacobian matrix but also points out the physical meaning of singularity.
Considering the instantaneity of the screws and the expression of the Jacobian matrix has been obtained, the singularity analysis of the 2CRR+RRRR parallel mechanism will be performed by means of the Jacobian matrix. From equation (17), the determinant value of the Jacobian matrix of the 2CRR+RRRR parallel mechanism can be obtained as follows

When the Jacobian matrix is a singular matrix, the manipulator will be in singular configurations. From equation (18), it can be concluded that when

or

If

or

When the mechanism parameters satisfy one or more of equations (19), (20), (21), and (22), the mechanism will be singular.
In this article, it would be well if the parameters of the mechanism are set as follows:
While

Dead point singular configuration of 2CRR+RRRR parallel mechanism.
While

Extremely displacement singular configuration of the 2CRR+RRRR parallel mechanism.
In addition, when the two or three rods of the second limb are collinear in the horizontal or vertical direction, as shown in Figure 6, the instantaneous geometric singular
25
of the mechanism occurred. At this moment, the relation between

where

Geometric singular configuration of 2CRR+RRRR parallel mechanism caused by the second limb.
As shown in Figure 6, when the rod

When the rods

Performance evaluation indices of the decoupled parallel mechanism
Isotropy performance analysis of the 2CRR+RRRR parallel mechanism
For the general parallel mechanism, the condition number indicates the effects of the limbs of the mechanism on the common action. While for the decoupled parallel mechanism, the coupled elements are eliminated and the relationship between the input and output is linear. Thus, to a certain extent, the performance indices depending on the condition number which is obtained from the Jacobian matrix is ambiguous in physical significance to evaluate the decoupled parallel mechanism. Therefore, it is more appropriate to evaluate the relationship between the input and output from the single limb point of view.
To a certain extent, the mechanism is regarded as isotropy if the output is consistent with the determined input. While for the decoupled parallel mechanism, a certain output only depends on an input of a certain limb and is independent of other limbs. Then, in this sense, the so-called traditional isotropy is not adapted to evaluate the performance of the decoupled parallel mechanism. In other words, using the traditional isotropy index to evaluate the performance of the decoupled parallel mechanism has no practical meaning.
From equation (17), for the 2CRR+RRRR parallel mechanism, the Jacobian matrix is

It can be seen that the Jacobian matrix is a lower triangular matrix, which indicates the two translational and one rotational parallel mechanism is decoupled. In addition, the Jacobian matrix concerns with some structural parameters of the mechanism and cannot reflect the whole pose and movement status information. For example, the ratio between the input speed of the first and second limb and the output speed of the moving platform of the mechanism is constant, which equals to 1, which demonstrates it has nothing to do with the pose of the mechanism.
Furthermore, the characteristic polynomial of the Jacobian matrix is
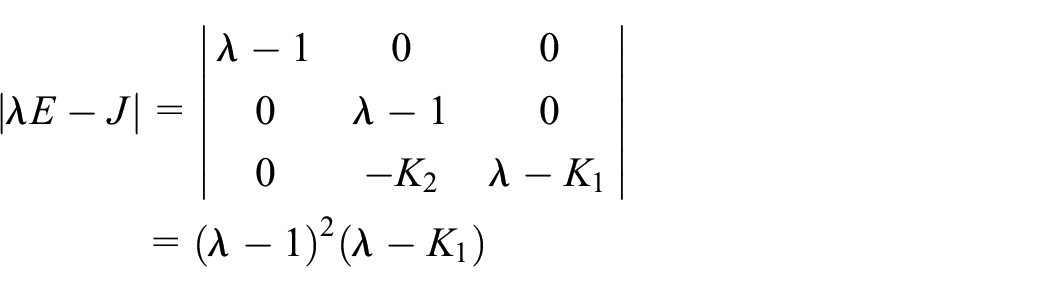
And the eigenvalue of the Jacobian matrix can be solved as

Then, the condition number of the 2CRR+RRRR parallel mechanism

Obviously, for the 2CRR+RRRR decoupled parallel mechanism, to a certain extent, it is unclear and incomprehensive in the physical sense to judge whether the mechanism be in the best movement transmission condition according to whether the condition number equals to 1 or not.
Discussion of the performance indices of the decoupled parallel mechanism
The Jacobian matrix of the decoupled parallel mechanism concerns with only some of the structure parameters or even none when the Jacobian matrix is unit matrix; 8 therefore, it is difficult to estimate the configuration of the mechanism from the Jacobian matrix merely. In other words, the Jacobian matrix cannot fully reflect the kinematic and dynamic nature of the decoupled mechanism. So, it is improper to define the performance evaluation indices of the decoupled parallel mechanism from the Jacobian matrix. Given the current research situation, it is necessary and meaningful to set the performance indices adapt to the decoupled parallel mechanism which is aiming at specific physical meaning and can judge the certain characteristic of the mechanism.
Considering that the mutual uninfluenced between the limbs of the decoupled parallel mechanism, the diagonal elements of the Jacobian matrix just represents the mapping relationship between the input of each limb and the output of the mechanism. Furthermore, the diagonal elements of the Jacobian matrix of the decoupled parallel mechanism represent the amplification coefficient between the input of the limbs and the output of the mechanism. While the Jacobian matrix of the decoupled parallel mechanism is a diagonal matrix, the diagonal elements just equals to the singular values of the matrix. Then, the anisotropy factor, which indicates the velocity ratio of the limbs, can be defined as follows

where
If K = 1, it means all the diagonal elements of the Jacobian matrix are equal. In other words, the speed ratios between the limbs are same. In other words, corresponding to the same input, the outputs of the limbs are same. The bigger the value of K, the more the difference between the limbs, and the anisotropy is more obvious.
The comprehensive velocity impact factor, which indicates the speed mapping conditions concerning all the limbs of the mechanism, is defined as follows

where n is the number of the degrees of freedom,
For the different parallel mechanisms, if the values of P are different, the velocity mapping ratio of the mechanism is also different. The bigger the P, the bigger the velocity mapping ratio of the mechanism, which means this mechanism requires more high output velocity under the premise of the same input speed.
For example, if the weighting coefficients are set as

Range of motion of the 2CRR+RRRR parallel mechanism.
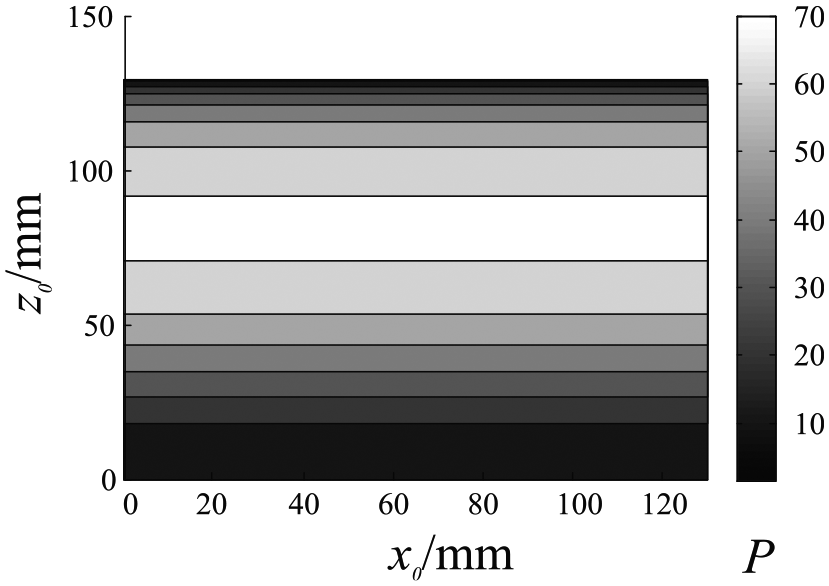
Then, the comprehensive velocity impact factor contours in the workspace of the 2CRR+RRRR parallel mechanism can be plotted as shown in Figure 8. What should be mentioned is that the output and input of the 2CRR+RRRR decoupled parallel mechanism along X-axis are independent of
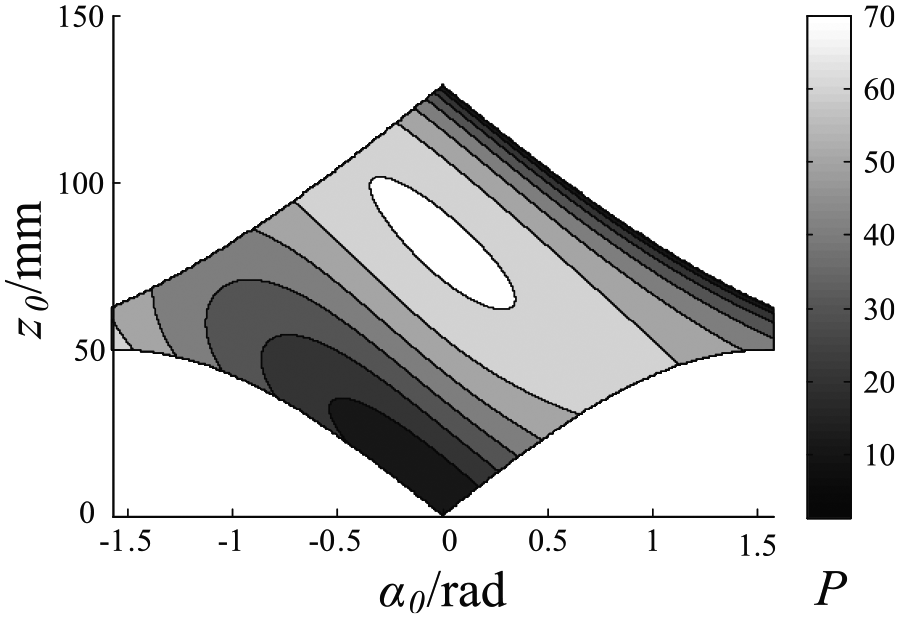
Comprehensive velocity impact factor contours on the transverse section of the workspace of 2CRR+RRRR parallel mechanism.
Comprehensive velocity impact factor contours on the longitudinal section of the workspace of 2CRR+RRRR parallel mechanism.
Corresponding to different task conditions, the requirements on the performance are different, thus the value of the velocity impact factor is different. For example, the velocity impact factor should be larger for the rapid movement working condition, while smaller for the stable working condition. On a condition which requires lock on a certain direction, it can be realized by setting the velocity impact factor of the corresponding limb to be zero. What should be mentioned is that the bigger the velocity impact factor, the lower the motion resolution under the same condition will be, which brings some influence on the kinematic accuracy of the mechanism. Therefore, how to determine the velocity impact factor should be comprehensively considered.
Conclusion
This article proposes a new 2CRR+RRRR spatial parallel robot mechanism with two translational and one rotational outputs. The number of DOF of the mechanism and its motion feature were analyzed. The forward and the inverse position are deduced, which verifies the decoupling feature of the mechanism. And the singularity of the mechanism was also carried out, which establishes the theoretical foundation for the further application research.
The performance evaluation indices of the decoupled parallel mechanism was discussed, and it is found that the traditional definition of the performance indices based on the Jacobian matrix is inappropriate to the decoupled parallel mechanism. The anisotropy factor and the comprehensive velocity impact factor are defined to evaluate the performance of the decoupled parallel mechanism, which is useful for the design and optimization of the decoupled parallel mechanism.
Footnotes
Academic Editor: Luís Godinho
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is supported by National Natural Science Foundation of China (51205339 and 51005195).